μ综合中的D-K迭代算法
2010-02-10何朕姜晓明孟范伟周荻
何朕, 姜晓明, 孟范伟, 周荻
(哈尔滨工业大学控制科学与工程系,黑龙江哈尔滨 150001)
0 引言
对于结构不确定性,需要用结构奇异值μ来描述系统的性能,而μ综合法[1-2]是处理参数不确定性系统鲁棒设计的一种有效的手段[3-4]。μ综合中控制器和μ值的求取需要采用迭代的方法来进行。虽然D-K迭代在Matlab中有现成的命令可供使用[5],但是这些命令的使用需要设计者与之互动,例如初始值的设置是否合理,迭代过程是否正常,是否还要进行下去等。为此需要对这些命令在迭代过程中所产生的数据有充分的了解。可是一般的手册或是非专业性的Matlab介绍都做不到这一点。本文从D-K迭代的理论出发,详细分析了迭代过程中所产生的数据,使之排除设计过程中的一些似是而非的结论,引导设计者正确进行D-K迭代来得出一个满意的鲁棒设计结果。本文将结合一个具体的μ综合例题来进行介绍,使所讨论的问题更为具体,以便于了解和掌握。
1 结构奇异值和μ综合
本文主要讨论μ综合的算法问题。为节省篇幅,一些基本概念和定义将随例子作些必要的说明而不单独进行讨论。这里的例子是一个卫星姿态控制系统,要求在参数摄动10%下保证系统的性能,即鲁棒性能问题。
设系统的运动方程[6]

式中:J1代表卫星本体,J2为卫星上的光学系统,二者是由连杆系统相连,J1=1,J2=0.1;k和b的名义值为k0=0.091,b0=0.000 36。本例取自文献[6],不过为了能突出本文的问题,b0取了一个更小的值。Tc为控制力矩,设输出量为 θ2,若选择 x=[θ2θ1]T作为状态变量,并设 Tc=u,则由式(1)和式(2)可写得状态空间表达式为
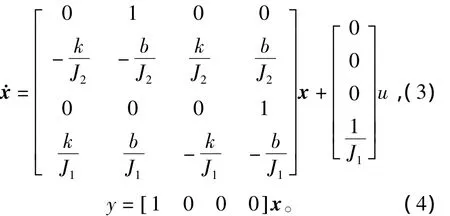
在下面的计算中按统一编号,输出y就是图1中的y2,而图1中的u2就是式(1)中的u。设连杆的结构参数随温度而有变化,即

式中k0为名义值;δk是界为1的不确定性,|δk|≤1;wk为相对变化范围,设wk=10%。
本例中b的值与k有关,按泰勒级数展开得

式中b0为名义值。
将上述的参数摄动代入式(3)可得

这里采用统一的符号Δ来表示不确定性,Δ=δk。式中C0x表示作用到不确定性Δ的信号,z3=C0x(见图1)。Δ的输出u3通过B0与状态阵A相加。这样,当将不确定性单独列出时,系统的状态方程式就可以用矩阵形式表示为
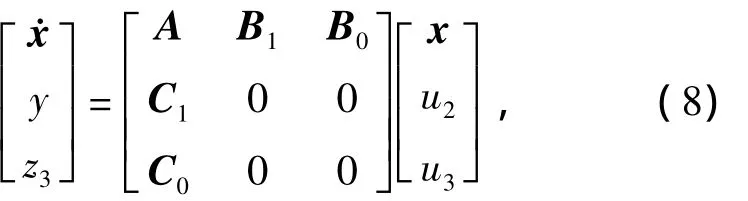
而不确定性的方程式为

式(8)表明,当考虑参数摄动时,卫星对象的输入将由u2和u3两部分组成,输出也可分为y2和z3两部分,而表示参数摄动的不确定性Δ则和对象形成一种上线性分式变换的结构,如图1所示。
图1中的W1、W2和W3均为常规的H∞设计中的权函数,为

式中的ρ应在μ综合设计中取最大值,举例中的数据采用的是优化设计最后一步的数据,此时ρ=0.11。
为了说明鲁棒性能问题,先将对象P与权函数合写成广义对象G,将图1整理成图2的形式。图2所示,即鲁棒性能问题的框图,要在存在参数摄动Δ时,要求从输入w到输出z的H∞范数小于1,即

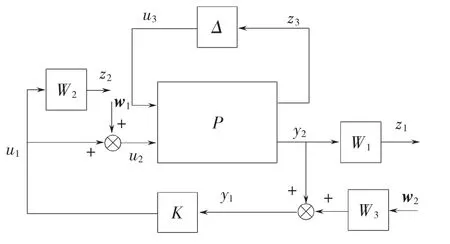
图1 系统的框图Fig.1 System block diagram
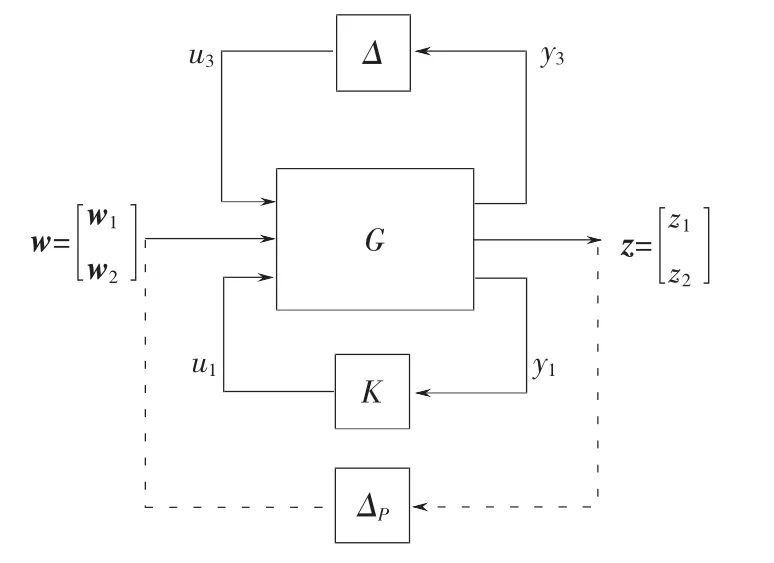
图2 鲁棒性能问题Fig.2 Robust performance problem
注意到这个鲁棒性能要求也相当于用一个摄动块ΔP跨接在w、z端上的稳定性要求,如图中虚线所示,‖ΔP‖∞≤1。设用M来表示控制器K回路闭合后的对象,M=Fl(G,K),则这个鲁棒性能要求就完全等价于M在块对角结构的摄动Δ和ΔP下的鲁棒稳定性问题,如图3所示,或者写成一个更为紧凑的形式,即

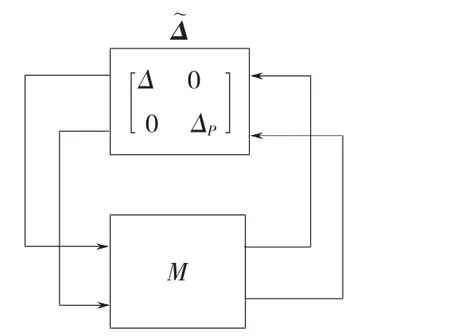
图3 结构不确定性问题Fig.3 Structured uncertainty problem
这种块对角结构的不确定性称为结构(化)不确定性。如果~Δ不是块对角结构,则根据小增益定理,图3系统稳定的条件就是¯σ[M]≤1或‖M‖∞≤1。但是在现在的结构不确定性下,这个奇异值(或H∞范数)条件就有保守性了,为此需要定义一个新的量,称为结构奇异值μΔ(M)。这里下角标Δ表明结构奇异值与具体的不确定性的结构形式有关,不过一般书写时也常略去这个下角标。与常规的H∞设计中要求系统的最大奇异值的最小值小于1的概念类似,图3系统稳定的充要条件为

根据式(12)的要求来设计控制器K的方法称为μ综合。
结构奇异值μ一般是通过上界来进行计算的。而且是利用一个标定阵D来获得一个更紧密的上界[2],即

这样,当用μ综合法时就是要求解下列的优化问题

注意到这里的D也是一个频率函数D(ω),所以这个优化问题是一个二参数的极小化问题

式(15)表明,当D(ω)确定时,这是一个H∞优化设计问题,可求得K。当K确定时,每一个ω下求D,使 ¯σ[DMD-1]最小,D 代入后再重复第一步,求解H∞优化设计问题。这样交替进行的求解过程称D-K迭代。
2 D-K迭代的计算
进行D-K迭代时,Matlab的 μ-Tools中有2个D-K迭代命令可供使用:
1)利用对话框命令dkitgui;
2)利用脚本文件dkit。这个命令实际上是调用一个已编好的程序,只要使用者对变量进行初始化即可。
这两个命令实质上是一样的,利用对话框命令时,设计时的互动性更强一些,设计者可一步一步地了解迭代的进程和选择必要的参数。如果不需要更多的互动,则可以选用dkit,可以较快地得出结果,甚至可以选用自动迭代的方式直接给出结果。
下面主要是结合dkit的结果来进行说明。在进行D-K迭代前首先需要建立广义对象的系统阵。第一步需要将图1中的各部分用pck或nd2sys命令转换成系统阵的形式,因为在H∞操作中是不支持传递函数的,都采用由状态空间表达式所构成的系统阵的形式。接下来将这些环节通过sysic命令连接成广义对象,具体的操作步骤可以参见文献[5]。广义对象如图4所示。需要强调的是,利用sysic建立广义对象G时的输入输出变量顺序都应该按图2所示的从上到下的顺序进行排列,否则可能得到的是另外一个广义对象。
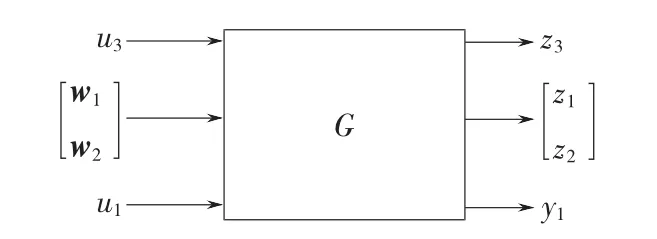
图4 本例中的广义对象Fig.4 Interconnection of the generalized plant
要将这个广义对象接入到dkit的M文件中,还需要定义一组用户变量,包括广义对象的名称G、对象测量输出y的维数、控制输入u的维数、摄动块的结构参数以及频率范围。在定义了用户变量后,若将这个文件保存为并命名为satellite-dk.m。在命令窗口输入下述命令,即

这样,dkit中就有了用户所定义的变量,就可以运行了。
作为例子,在进行相应的变量定义后,通过dkit进行D-K迭代,第一次的迭代过程如表1所示,得γ值为65.625。
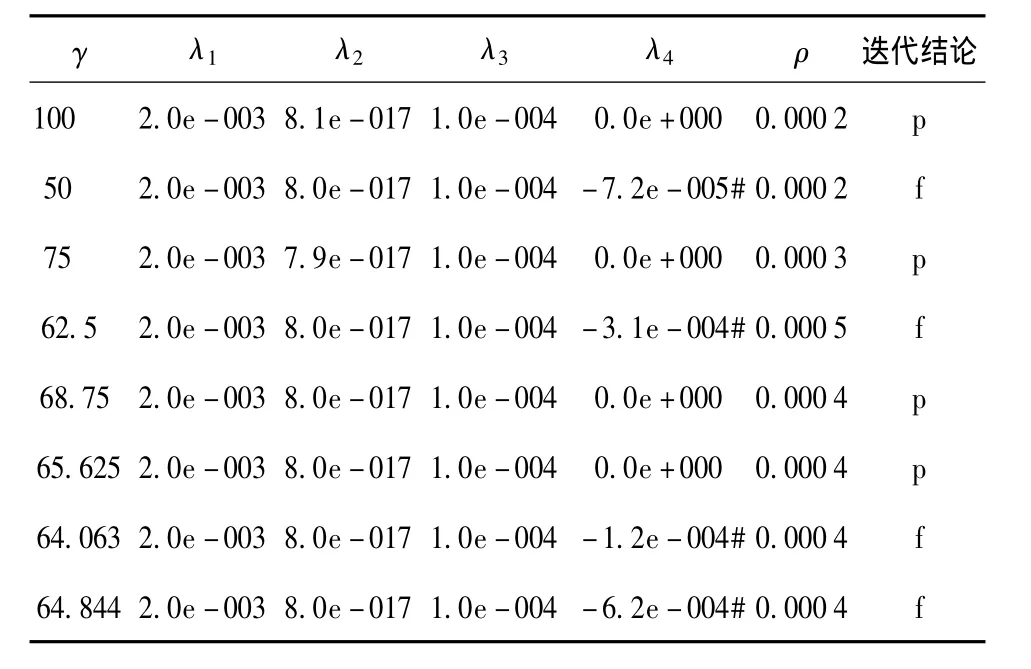
表1 第一步γ迭代的结果Table 1 First γ-iteration results
表1中λ1、λ3分别代表Hamilton阵H∞和J∞特征值的最小实部,而λ2、λ4分别表示Riccati方程解X∞和Y∞特征值的最小实部,ρ表示 X∞Y∞的谱半径。这第一步中的标定阵D=I,在综合控制器K(s)的γ迭代中求解的就是H∞优化问题


这些离散数据¯σ[D(ωi)M(G,K)D-1(ωi)]中的最大值便是这第一次迭代所得出的μ值,本例中为2.987(见表2)。
求得K后还要进行μ分析,即将K(s)代入系统中,并在各频率点上求极小,为
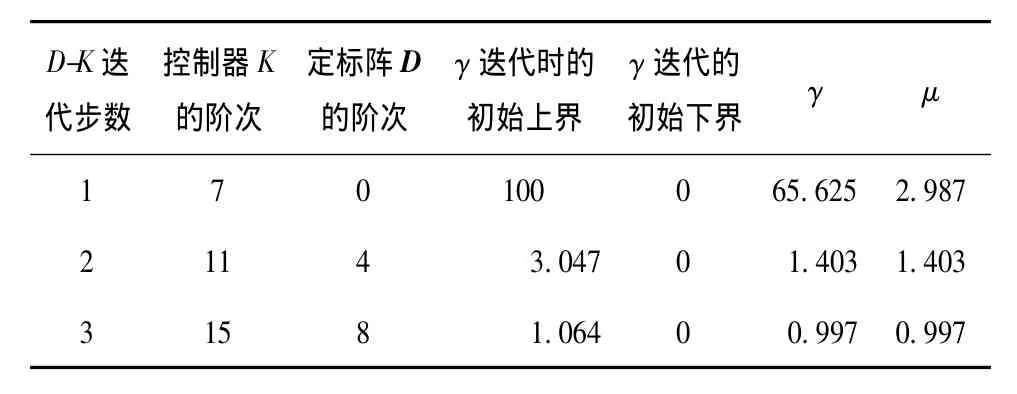
表2 迭代结果Table 2 Iteration results
第二步D-K迭代时,利用第一步所得的K(s),并对D(ωi)的数据用有理函数阵拟合得D(s),再依次求解式(16)、式(17)的优化问题,表2所示就是本例的各次迭代结果。第3次迭代后μ的最大值为0.997,就可以停止迭代了。图5所示即为3次迭代后所得的最终的控制器K奇异值bode图。
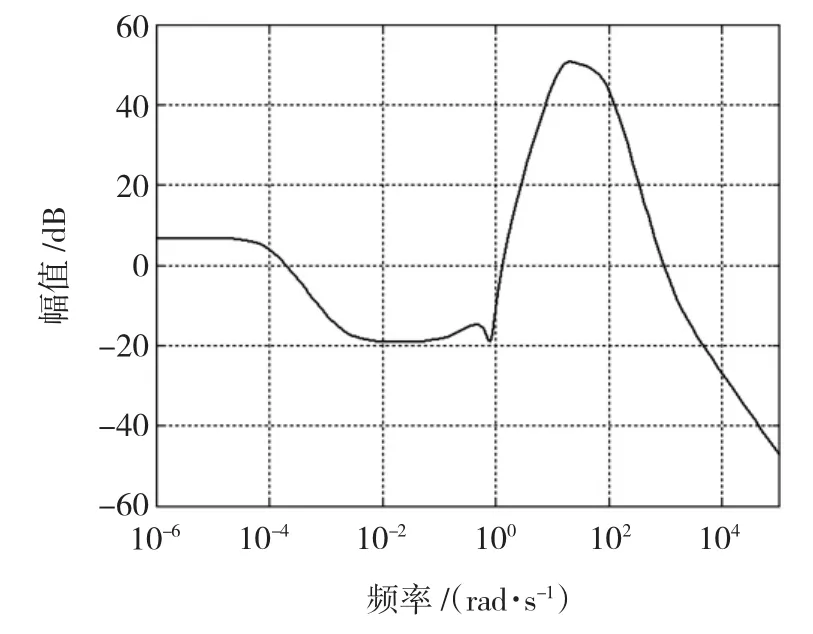
图5 三次迭代后的控制器奇异值bode图Fig.5 Bode plot of controller after 3 iterations
3 算法分析
D-K迭代实际上是一种交互式的设计过程,中间会交替出现不同的γ值和μ值,究竟哪些数据会影响到对设计过程的判断还需要分别从K和D的求解算法上来进行分析。
3.1 二分法γ迭代和γ的上界
D-K迭代中当D(ω)确定下来后就是一个H∞优化设计问题,见式(15)。H∞优化问题是指求解最小的H∞范数值γ,并给出H∞控制器K(s)。这个最小的γ值一般采用二分法来进行。即先给定一个γ值的范围,例如0~100,然后判断系统的H∞范数是否小于这个给定的上限值100。如果满足γ<100的条件,再将这个上限折半,看是否小于50。如果不满足,则在50~100之间找。这样折半寻找,称为γ迭代,一直到满足误差要求的最小值。这里的H∞范数是否小于某个给定的γ值所依据的是H∞理论中的2个Riccati方程法,即DGKF法[7]。DGKF法指出,H∞问题是否有解(即H∞范数< γ)的条件是Hamilton阵H∞和J∞是否属于dom(Ric),且对应的解X∞和Y∞是否是半正定和ρ(X∞Y∞)是否小于1,式中ρ为谱半径。因此在γ迭代过程中每次都要计算H∞阵和J∞阵的特征值和广义特征向量。用计算机求解矩阵的特征值时要考虑到算法的数值稳定性问题[8]。为此在求解特征值时一般是将矩阵变换成Schur上三角形,Schur上三角形阵的对角元就是特征值。Schur变换的算法不是一种有限步的算法,而是一种迭代的QR算法[8]。QR算法是一个公认的算法,一般都可很快收敛到真实值。但若遇到病态的特征值,则会出现误差[8]。所谓病态特征值是指2个特征值非常接近的情况(例如有重根的情况)。在二分法γ迭代过程中,不断减小的γ值代入到高阶的H∞和J∞阵中难免会出现重根的情况,这时就可能会得出错误的结果。具体来说,本例中dkit是按各默认值来运行的,γmax=100,第一次的判别是γ<100(见表1),折半后要检查是否小于50,表1第二行表明这时Y∞阵的一个最小的特征值已小于0,即Y∞已非半正定,表明系统的H∞范数不小于50,其实这是错判了。经检查,Y∞是Hamilton阵J∞的解,而γ=50时,这个J∞阵恰好存在两对重根:-1 000、-1 000和1 000、1 000。这2对病态特征值导致γ=50时迭代失败。这个判断失败,导致需要到50~100之间的二分法寻找,最终得这次γ迭代的结果是65.625。由此可见H∞优化中先后会出现2个γ值,一个是根据是否有解的条件得到的65.625,另一个则是加上控制器后实际得到的H∞范数。这前一个值可以称为是γ的上界。所以当采用dkit进行D-K迭代时,首先显示的就是γ,如果见到这么大的γ值(65.625),就可能放弃这次数据而令外寻找别的方案。其实这只是一个假象,真正的γ值并没有这么大,就本例而言,经过验证其真实值约等于第一步迭代产生的μ值,见表2的设计结果。
3.2 D拟合的收敛问题
D-K迭代中当上一步求得K(s)后,下一步就是要求解D(ω)使 ¯σ[D(ω)Fl(G,K)D-1(ω)]达到最小。这一般是在上一步先得出各离散频率点上达到极小值时的D(ωi),然后再用有理函数阵D(ω)来进行拟合,将拟合所得到的D(ω)代入式(16),再求解H∞优化问题。所以这里也有两套数据的问题,一个是逐点寻优所得的范数,另一个则是用有理函数代替后求得的H∞优化解。如果D(ω)拟合得不好,则这两套数据就会有矛盾。一般来说,D-K迭代的过程总是收敛的,但如果迭代过程中发现μ值收敛不好(有波动或变大),则很可能就是标定阵D(ω)的拟合不好。一个可能的原因是求极小值时离散点不够密,没有完全覆盖系统中的高频分量,例如弱阻尼的谐振模态。
4 结论
D-K迭代中包含γ迭代和标定阵D的求极小,在依次迭代中会出现多个范数值,弄清这些数据产生的背景,对正确进行D-K迭代是至关重要的。其实是对于γ迭代来说,因为Hamilton阵的特征值随每次的γ值而有变化,当出现病态特征值时,γ迭代过程就会停止在一个较高的虚假值上,加上控制器后的系统的H∞范数才是真正的γ值。而且这里的讨论也具有普遍意义,因为H∞控制理论中有多种方法,包括线性矩阵不等式法,这些算法得出的并不是真实的γ值,而只是一个γ的上界,加上控制器后实际得到的γ值才是真正的H∞范数。
[1] 周克敏,DOYLE J C,GLOVER K.鲁棒与最优控制[M].毛剑琴,钟宜生,林岩,等译.北京:国防工业出版社,2002:306-338.
[2]STEIN G,DOYLE J C.Beyond singular values and loop shapes[J].Journal of Guidance,Control and Dynamics,1991,14(1):5-16.
[3]LANZON A,TSIOTRAS P.A combined application of H∞loop shaping and μ-synthesis to control high-speed flywheels [J].IEEE Transactions on Control Systems Technology,2005,13(5):766-777.
[4]YIN Guodong,CHEN Nan,LI Pu.Improving handling stability performance of four-wheel steering vehicle via μ-synthesis robust control[J].IEEE Transactions on Vehicular Technology,2007,56(5):2432-2439.
[5]BALAS G J,DOYLE J C,GLOVER K,et al.μ-Analysis and Synthesis Toolbox[M].Natic:MathWorks and MUSYN,1993.
[6] FRANKLIN G F,POWELL J D,EMAMI-NAEINI A.动态系统的反馈控制[M].朱齐丹,张丽珂,原新,等译.4版.北京:电子工业出版社,2004:488-498.
[7]DOYLE J C,GLOVER K,KHARGONEKAR P P,et al.State space solutions to standard H2and H∞control problems[J].IEEE Transactions on Automatic Control,1989,34(8):831-847.
[8]MACIEJOWSKI J M.Multivariable Feedback Design[M].New York:Addison-Wesley Publishing Company,1989.
(编辑:张诗阁)
