基于连续体机器人技术的金针菇自动采收装置设计
2024-12-31陈艺超李龙白东明徐阮佳陆洪漾陈斌杰


摘 "要:在现有的金针菇工厂化产线中,滤光罩拆卸、金针菇采收、金针菇切根3道关键工序仍需人工完成,效率低下,且人工成本高昂。为提高工厂的自动化程度及金针菇生产效率,对金针菇的产线方案进行搭建,模块化设计一种金针菇自动采收装置,将3道工序集成为一体。结合连续体机器人技术设计一种绳驱动金针菇柔性夹爪,解决自动化实现金针菇无损采收这一核心问题。同时在环保的角度进一步完善产线,产线中对滤光罩与切割后的金针菇根壤分别进行回收,实现金针菇产线的废料回收再利用。
关键词:金针菇;结构设计;绳驱动;连续体机器人;生产线
中图分类号:S646.1+5 " " "文献标志码:A " " " " "文章编号:2096-9902(2024)22-0006-04
Abstract: In the existing industrial production lines for enoki mushrooms, or Flammulina velutipes, the three critical processes of removing light filters, harvesting enoki mushrooms, and cutting the roots still require manual labor, resulting in low efficiency and high labor costs. In order to improve the automation degree of the factory and the production efficiency of enoki mushrooms, a production line plan for enoki mushrooms was built, and an automatic harvesting device for enoki mushrooms was designed to integrate the three processes. A rope-driven flexible gripper for enoki mushrooms was designed based on continuum robot technology, which solved the core problem of automated non-destructive harvesting of enoki mushrooms. At the same time, the production line was further improved from the perspective of environmental protection. In the production line, the filter and the cut enoki mushroom root soil were recycled separately, realizing the recycling and reuse of waste from the enoki mushroom production line.
Keywords: enoki mushroom; structural design; rope-driven; continuum robot; production line
金针菇是食用最广泛的菌类之一,也是我国食用菌生产的常规主品种之一,2021年全国食用菌鲜品总产量为4 133.96万t[1]。其味道鲜美,营养丰富,且具有一定的中医药价值。金针菇是中国最早实现工厂化生产的食用菌品种,也是目前日产和年产数量最大的品种[2]。
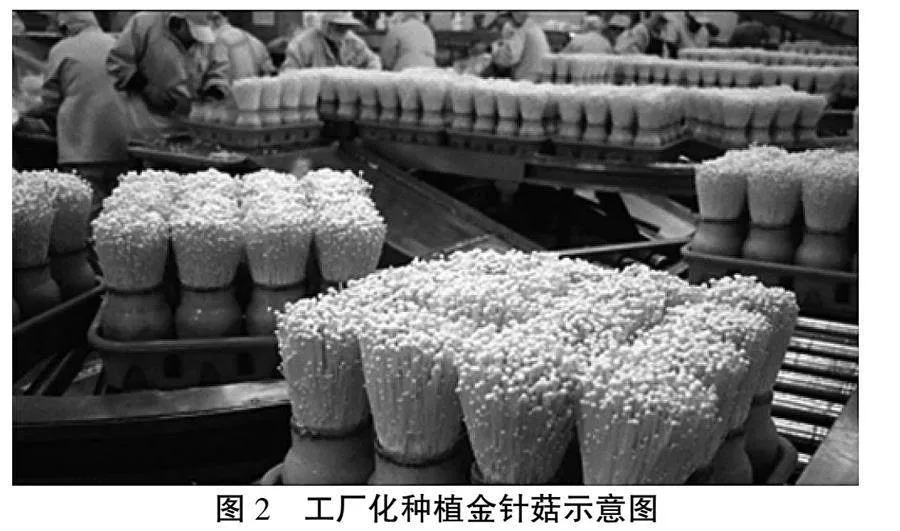
目前金针菇的种植方式为工厂化瓶栽种植,培养瓶在每个金针菇盆中以横向、纵向4×4的方式分布放置。工厂化种植金针菇可分为滤光罩拆卸环节、金针菇采收环节、金针菇切根环节3个部分。金针菇表面贴合的滤光罩如图1所示,其由魔术贴在衔接处进行粘接。工作者接收产线输送的金针菇盆后,依次拆卸培养瓶上的蓝色滤光罩,拆卸完成后将金针菇从培养瓶中分别拔出,进行金针菇的切根工序,最后将金针菇输送出库,如图2所示。
随着瓶栽种植食用菌类技术及农业自动化采摘技术的发展,金针菇的自动化采收已展开相应研究。Sujatanagarjuna等[3]提出了一种模块化、可拓展的室内蘑菇收获系统,其蘑菇采收环节中采用了割刀式末端执行器分离蘑菇根部与菌柄。割刀式末端执行器在食用菌分离阶段体现出高效的优点,但具有一定的危险程度。高文硕等[4-5]针对金针菇作物特性进行了拉拔试验,得到了金针菇拉拔力等理论参数,基于该理论参数设计了一种双机械手瓶栽金针菇采收机器人,其末端执行器设计为与金针菇菌柄局部契合的刚性圆弧状夹爪。刚性夹爪在抓取金针菇过程中会由于接触力集中造成金针菇丛边缘损伤[6],因此,金针菇采收执行器应为柔性执行器,从而保证金针菇的采收质量。
基于金针菇的采收前后流程,本文设计了一种金针菇自动化采收产线,将上述滤光罩拆卸、金针菇采收、金针菇切根3道工序集成为一体,分别为滤光罩拆卸模块、金针菇采收模块、金针菇自动切根模块,提升了现有金针菇工厂的自动化程度。并且为保证金针菇出库品质,考虑到金针菇在采收环节的易损,在金针菇采收环节中,结合绳驱动连续体机器人技术[7-12],设计了一种柔性夹爪,实现了金针菇的无损采收。
1 "产线总体方案设计
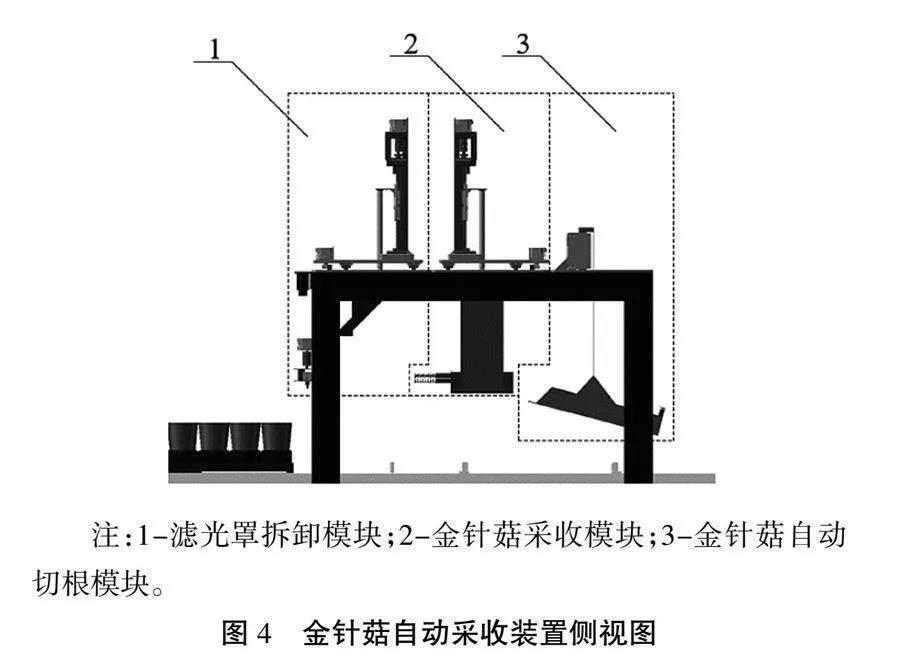
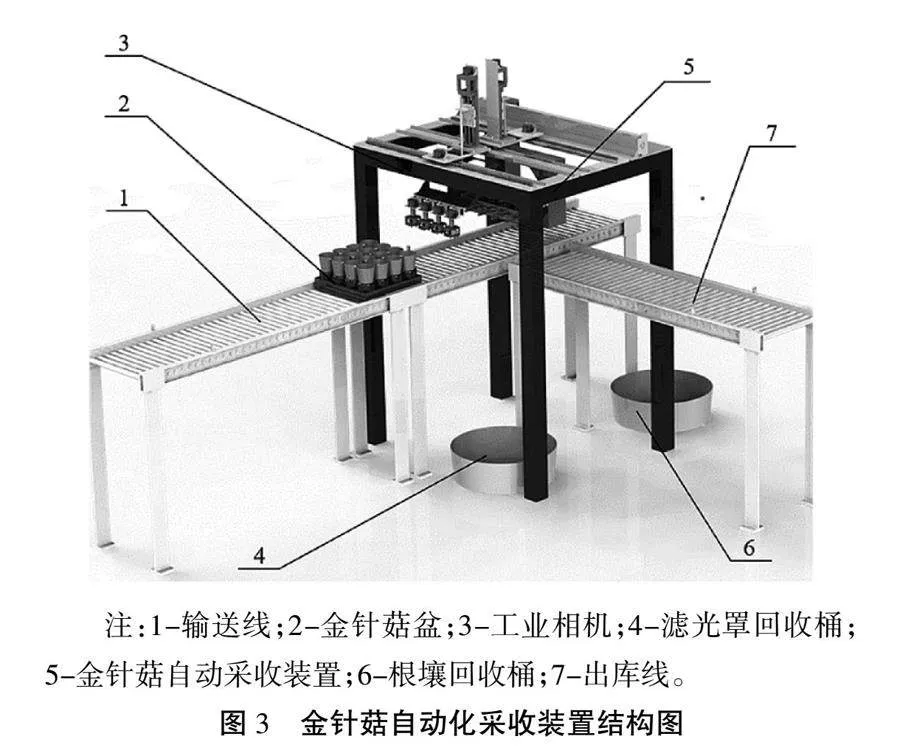
金针菇自动化采收装置整体设计如图3和图4所示,当金针菇盆通过输送线达到工业相机识别位置后,输送线停止工作,滤光罩拆卸模块根据工业相机识别到的滤光罩标签定位信息将金针菇盆第一行的滤光罩拆卸处理,拆卸完成后滤光罩拆卸模块移动到滤光罩回收桶处,回收桶对滤光罩进行收集,用于二次利用。每完成一行的滤光罩拆卸作业,输送线进行运作将下一行待拆卸滤光罩输送至滤光罩拆卸模块工作位置。
当每个培养瓶中的滤光罩均被拆卸后,金针菇盆被输送到采收装置位置。柔性夹爪将第一行金针菇连根拔起,并将金针菇翻转。翻转后金针菇位置与切根装置相对应,此时切根装置运行,切根过程中残渣不断回收至根壤收集仓中。当切根工序完成后,回收仓继续移动至根壤回收桶上方,此时后仓门打开,根壤回收桶收集掉落的金针菇根壤残渣,其可用于进行金针菇培养基的制作。同时采收装置复位,采收装置移动至最右端,金针菇由此放置于出库线上,实现金针菇的自动出库。
2 "滤光罩拆卸模块设计
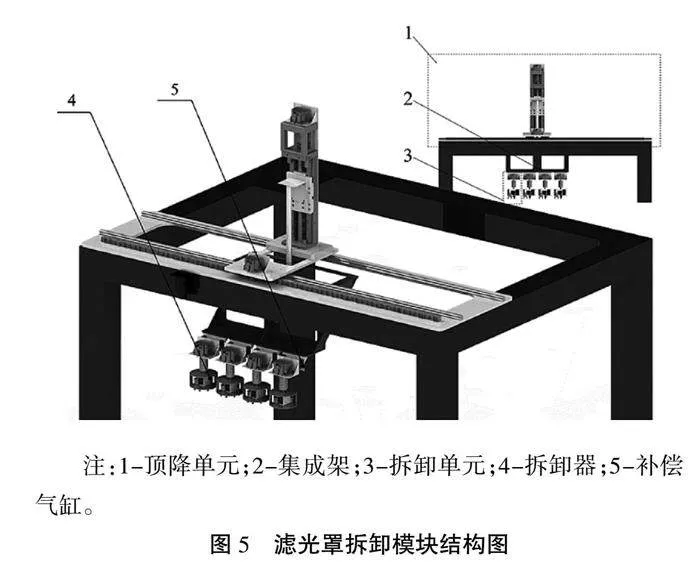
滤光罩拆卸为金针菇采收过程的第一道工序。滤光罩拆卸模块结构示意图如图5所示,整体共具有3个自由度。四方板铺设有导轨与齿条,顶降单元与平移电机竖直安装于四方板上。当平移电机运作时,滤光罩拆卸模块在平移电机与电机齿轮的啮合作用下实现X轴方向的移动。同时拆卸单元再与顶降单元通过连接杆连接,保证了滤光罩拆卸模块在Z轴方向的运动。
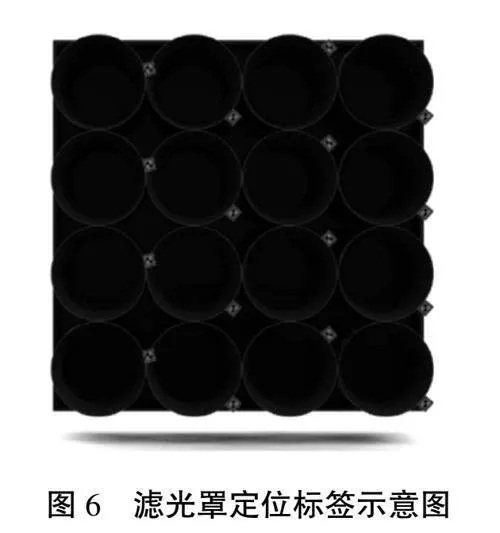
在集成架的末端,补偿气缸与拆卸单元相连接。当工业相机识别到滤光罩边缘的定位标签后,拆卸单元需要保证与金针菇中所在行待拆卸滤光罩同轴。滤光罩定位标签如图6所示(去除金针菇)。由于金针菇盆中待拆卸滤光罩可能存在行距离偏差,补偿气缸将对每个滤光罩对应的拆卸单元进行距离修正,确保了滤光罩拆卸模块在Y轴方向的运动。
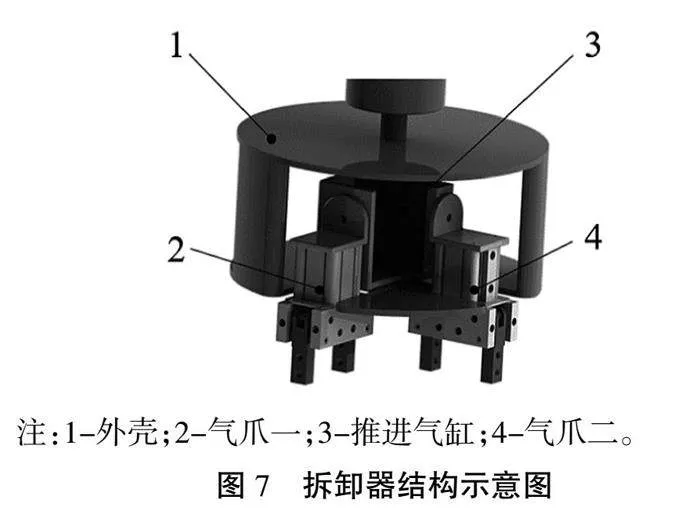
在滤光罩拆卸模块中,拆卸器如图7所示,当拆卸器移动到待拆卸滤光罩同轴位置后,旋转电机根据定位标签通过联轴器将拆卸器旋转至对应角度,顶降单元带动拆卸器下落。拆卸器中2个气爪夹紧滤光罩边缘位置,推动气缸将气爪二向外拉伸,从而将滤光罩撕开,并转运到滤光罩回收桶中。
3 "金针菇采收模块设计
完成上述滤光罩拆卸工序后,输送线将金针菇转运至金针菇采收模块工作位置处。采收环节为第二道工序,也是整个工艺流程中的核心环节。为了确保金针菇在采收过程中能够无损出库,针对金针菇的采收作业设计了一种柔性夹爪。金针菇采收模块如图8所示。其中顶降单元、平移电机与滤光罩拆卸模块相同,保证了采收模块在X轴、Z轴方向的移动。固定架的两侧分别设有旋转电机,旋转电机轴与柔性夹爪通过联轴器相连接,同时固定架中间留有柔性夹爪翻转的空间,当旋转电机工作时,金针菇在柔性夹爪的抓取下实现翻转,为后续切根工作做准备。
柔性夹爪的结构示意图如图9所示,针对每行待抓取的4丛金针菇可以将柔性夹爪共分为4个单元,每个单元通过舵机实现驱动。考虑到金针菇盆中每行金针菇之间的间距狭窄,为保证柔性夹爪能够满足每行待抓取金针菇的间距,因此将单元之间的菇卡板与连续体在空间上进行交叠分布。舵盘的上、下两端固定有驱动绳索,驱动绳索通过导向滑轮末端与连续体末端相接。当舵机转动时,连续体在驱动绳索的拉力作用下形成弯曲圆弧,抓取金针菇过程中,每部分的2个连续体与菇卡板共同实现金针菇菌柄表面的贴合。随着舵机旋转角度的增大,连续体的抓取力也随之增大,从而在连续体与菇卡板的共同作用下对金针菇进行夹持。
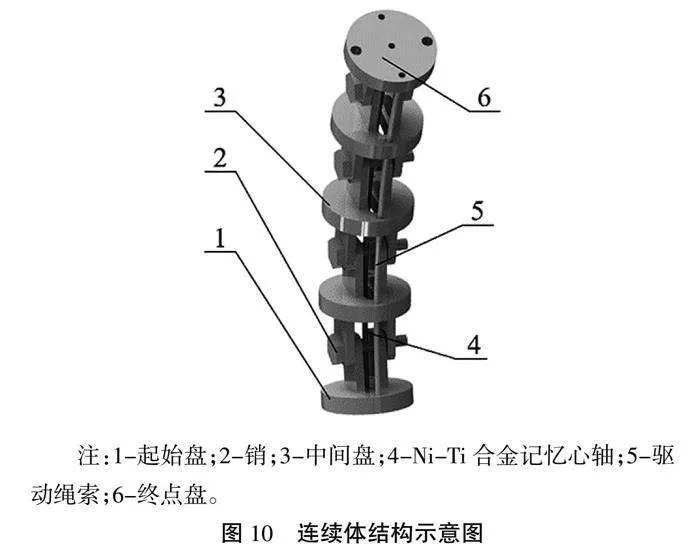
连续体弯曲结构示意图如图10所示,其中Ni-Ti合金记忆心轴由起始盘出发至终点盘,贯穿于整个连续体的中轴线。各连接盘之间通过销连接。当舵机运作时,连续体在驱动绳索的拉力作用下实现弯曲。当金针菇完成采收时,舵机旋转角度转为0°,此时连续体在Ni-Ti合金记忆心轴的弹性作用下实现复位。
4 "金针菇自动切根模块设计
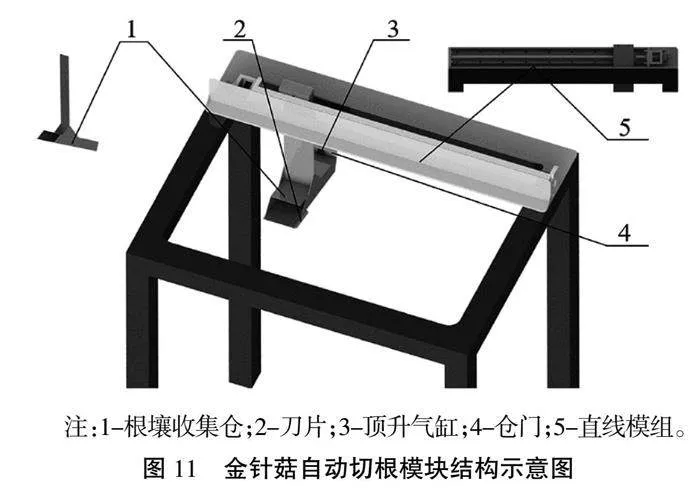
当金针菇采收模块成功抓取金针菇后,此时柔性夹爪翻转210°,即金针菇根部朝上翻转至金针菇自动切根模块工作位置。金针菇自动切根模块结构示意图如图11所示,根壤收集仓的顶端固定在直线模组的工作台上,由直线模组实现根壤收集仓在X轴方向的移动。根壤收集仓底端固定有切割刀片,直线模组走刀时将金针菇根壤在自身惯性下掉落至收集仓中。当切割工序完成后,顶升气缸将仓门打开,收集仓内的金针菇根壤残渣掉落至回收桶中。
5 "结束语
本文设计了一种金针菇自动采收产线,分别为滤光罩自动拆卸模块、金针菇采收模块、金针菇自动切根模块,3个模块一体化集成。对传统的金针菇生产的多道工序进行了合并,实现了金针菇的自动化生产。同时在金针菇采收模块中,针对金针菇的无损采收作业设计了一种柔性夹爪,确保了采收环节到出库过程中金针菇的采收质量。后续工作将对采收模块中柔性夹爪抓取金针菇过程的成功率进行进一步分析与探究。
参考文献:
[1] 2021年度全国食用菌统计调查结果分析[J].中国食用菌,2023,42(1):118-127.
[2] 刘洋,陈辉,冯志勇,等.LBL评价与真姬菇表观农艺性状相关性分析[J].上海农业学报,2011,27(2):116-120.
[3] SUJATANAGARJUNA A, KIA S, BRIECHLE D F, et al. MushR: A smart, automated, and scalable indoor harvesting system for gourmet mushrooms[J]. Agriculture,2023,13(8):1533.
[4] 高文硕,宋卫东,王教领,等.金针菇拉伸试验研究[J].中国农机化学报,2020,41(6):106.
[5] GAO W,SONG W,WANG M,et al.Design and analysis of bottled Flammulina velutipes pull-out testing[J]. International Agricultural Engineering Journal,2020,29(2):154-162.
[6] GAO W, SONG W, WANG M, et al. Design and experiment of dual-manipulator cooperation and implementing for robotic harvesting bottled flammulina velutipes[J]. Solid State Technology,2021,64(2):7624-7639.
[7] LI J, ZHANG F, YANG Z, et al. Shape sensing for continuum robots by capturing passive tendon displacements with image sensors[J]. IEEE Robotics and Automation Letters, 2022,7(2):3130-3137.
[8] GAO G, WANG H, LIU J, et al. Statics analysis of an extensible continuum manipulator with large deflection[J]. Mechanism and Machine Theory,2019,141:245-266.
[9] ZHONG G, PENG B, DOU W. Kinematics analysis and trajectory planning of a continuum manipulator[J]. International Journal of Mechanical Sciences, 2022,222:107206-107220.
[10] JING X, JIANG J, XIE F, et al. Continuum manipulator with rigid-flexible coupling structure[J]. IEEE Robotics and Automation Letters,2022,7(4):11386-11393.
[11] YANG C, GENG S, WALKER I, et al. Geometric constraint-based modeling and analysis of a novel continuum robot with shape memory alloy initiated variable stiffness[J]. The International Journal of Robotics Research,2020,39(14):1620-1634.
[12] ZHANG X, XIAN Y, CUI Z, et al. Design and modeling of a novel DNA-inspired Helix-based Continuum Mechanism(DHCM)[J]. Mechanism and Machine Theory,2022,171:104702.
