基于人机工程学的下肢外骨骼运动控制
2024-10-31包泓吴万毅刘芳华邵佳伟孙天圣狄澄王政



摘 要: 为避免外骨骼机器人髋关节和膝关节尺寸影响患者正常行走功能的恢复,踝尺寸对脚落地姿态的影响,提出一种基于人机工程学的外骨骼机器人运动控制方法.首先利用人机工程学对人体的参数进行收集,并以此构建适合人体尺寸、具有舒适穿戴的外骨骼模型架构,使外骨骼机器人满足穿戴人群差异化的需求;然后所构建的下肢外骨骼架构,建立外骨骼下肢末端的位姿并构建单肢三自由度机械腿的正向运动学方程,通过对机器人的步行计划,外骨骼机器人的实际步行过程由ADAMS进行模拟,验证人体行走时两腿各关节扭矩的变化规律;最后为了验证该方法在关节速度控制中的优越性和有效性,选择模糊PID进行控制.
关键词: 人机工程;下肢外骨骼机器人;运功控制;模糊PID
中图分类号:TP181;TP242.6"" 文献标志码:A"""" 文章编号:1673-4807(2024)02-041-06
Motion control of lower limb exoskeleton based on ergonomics
Abstract:In order to avoid the impact of the size of the exoskeleton robot′s hip and knee joints on the recovery of human normal walking function, and the influence of the size of the ankle on the landing posture of the foot, a motion control method of the exoskeleton robot based on ergonomics is proposed. Firstly, while reducing the complexity of the mechanism, ergonomics is used to collect the parameters of the human body and to build an exoskeleton model architecture suitable for human body size and comfortable to wear, so that the exoskeleton robot can meet the differentiated needs of wearers. Then, the posture of the lower extremity of the exoskeleton is established and the forward kinematics equation of the single limb three degree of freedom mechanical leg is constructed. Through the walking plan of the robot, the actual walking process of the exoskeleton robot is simulated by ADAMS to verify the variation law of the torque of each joint of the two legs when the human body walks. Finally, in order to verify the superiority and effectiveness of this method in joint speed control, fuzzy PID is selected for control.
Key words:ergonomics, lower limb exoskeleton robot, power operation control, fuzzy PID
外骨骼作为现代医疗助力康复领域重点的研究方向,具有良好的发展空间和广阔的市场前景[1].然而,目前对于下肢外骨骼机器人的机械结构设计因为未能充分的与人体相适应,导致在运动时,对人的康复运动造成干扰,且在康复机器人的控制方面达不到符合人类实验预期的效果,经常被控制精度低和机器人的响应不灵敏等一些问题所困扰[2].因此提出了一种以人机工程学为依托,用于控制外骨骼机器人运动的方法,该方法与人机工程学相结合,构建了与人体有超高相似度的模型,使外骨骼具有使用简便、穿戴舒适,行动上给人如臂驱使的感觉等特点[3],同时,计算了人体下肢运动过程中各关节的具体尺寸参数,以提高其控制精度.此外,还设置了模糊PID控制系统,验证了模糊PID控制下外骨骼机器人关节速度控制的优势.
1 基于人机工程学的模型构建与数值计算
1.1 符合人机工程学的下肢外骨骼机器人模型构建
以人机工程学为支撑,一比一还原了具有精确数值的下肢外骨骼机器人.通过获取人体的尺寸数据计算对应的人机尺寸;通过对人体各个关节运动时的架构尺寸的计算,获取人体下肢各关节的运动姿态,帮助构建曲面人机姿态.
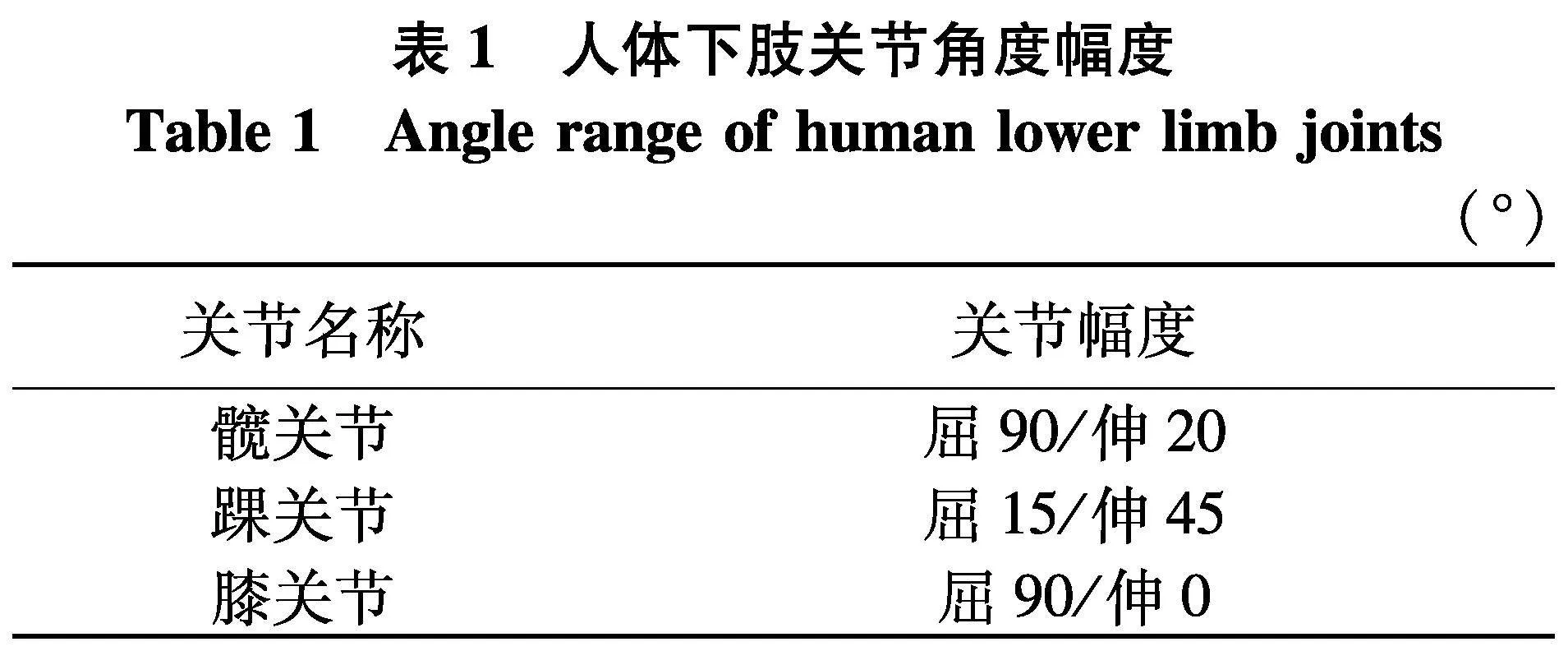
人体通过关节的屈曲和伸展来实现下肢的交替运动.髋关节具有带动大腿的摆动,使下肢完成提起和放下的功能.膝关节作用是带动小腿的摆动,完成 “抬脚”的动作,同时膝关节承受了脚与地面碰撞后的作用力.脚踝将地面的作用力从脚底传递到腿部,以减少足部碰撞的影响.文中组建一种单下肢三自由度的机器人,为符合人机工程学的运动模型构建,人体下肢关节角度运动幅度如表1,根据关节角度范围,合理地设计外骨骼的机械尺寸,使其经过调整能适应穿戴者的身高及其下肢部分的长度尺寸 [4].文中基于人机工程的参考对象是身高约为174 cm,体重约为65 kg的成年男性,大腿,小腿,脚长度分别为495,397,271 cm.
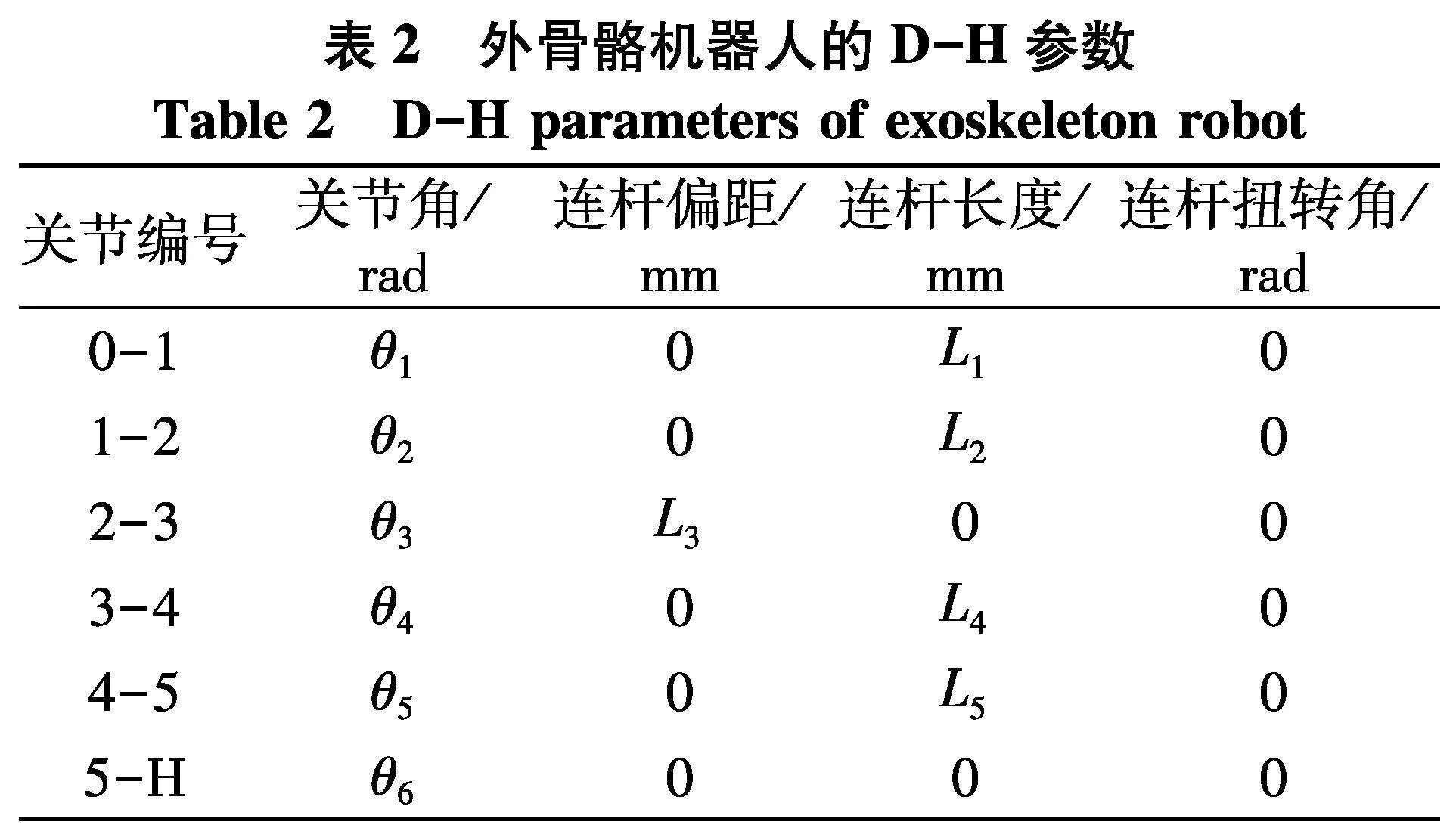
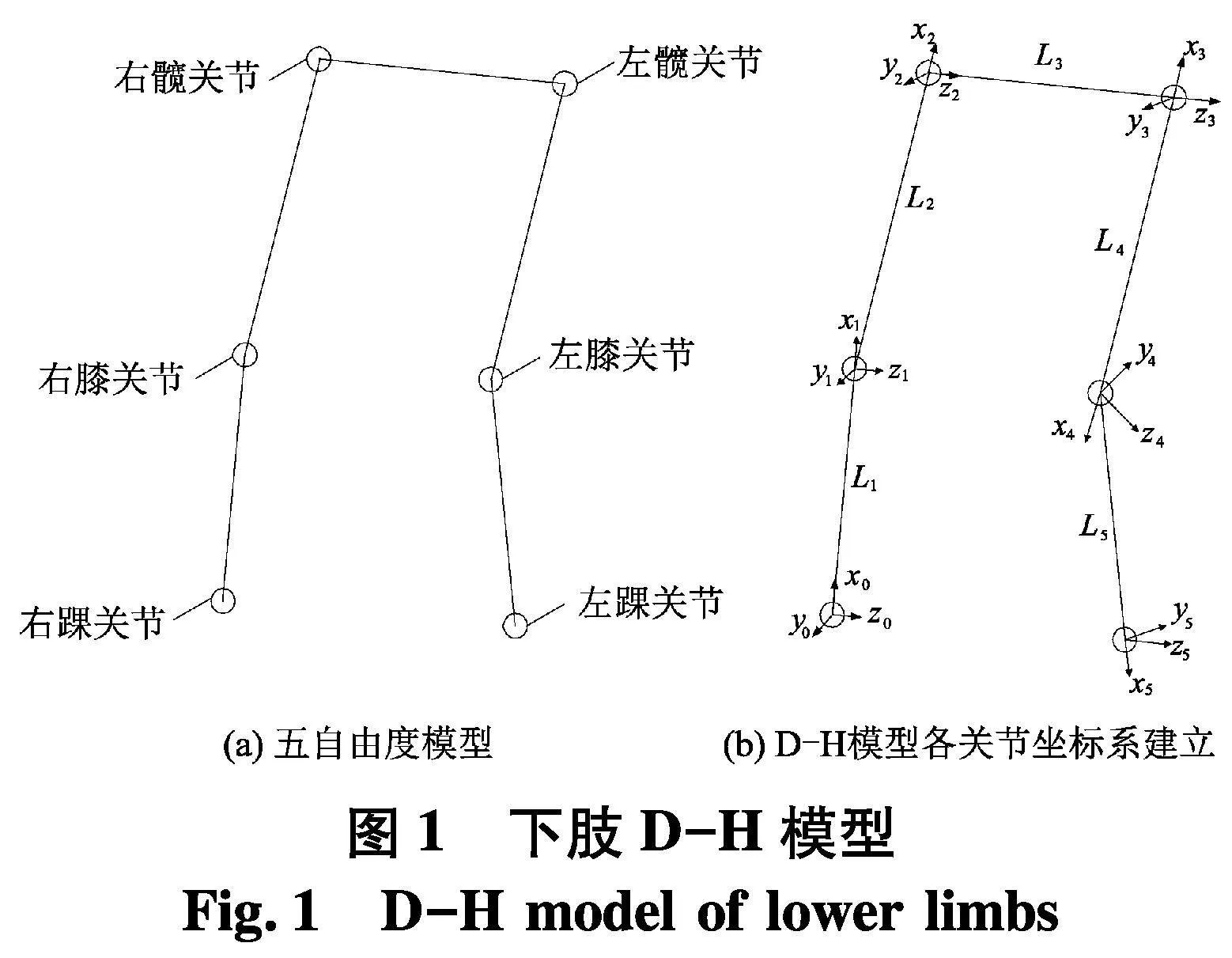
在外骨骼稳定行走的过程中,由于脚和地面处于静态摩擦状态,因此没有相对运动.所以支撑脚从小腿到上肢的关节编号为0、1、2,从摆动脚上端到底部的关节编号为3、4、5.为了显示关节5的运动,在摆动腿的前端设置假想关节编号H.可自由搭建五自由度下肢连杆[5]外骨骼机器人的D-H模型如图1,D-H参数[6]如表2.
表2中,L1和L5是外骨骼机器人的小腿长度,L2和L4是大腿长度,L3是机器人的腰部长度.
1.2 正运动学计算
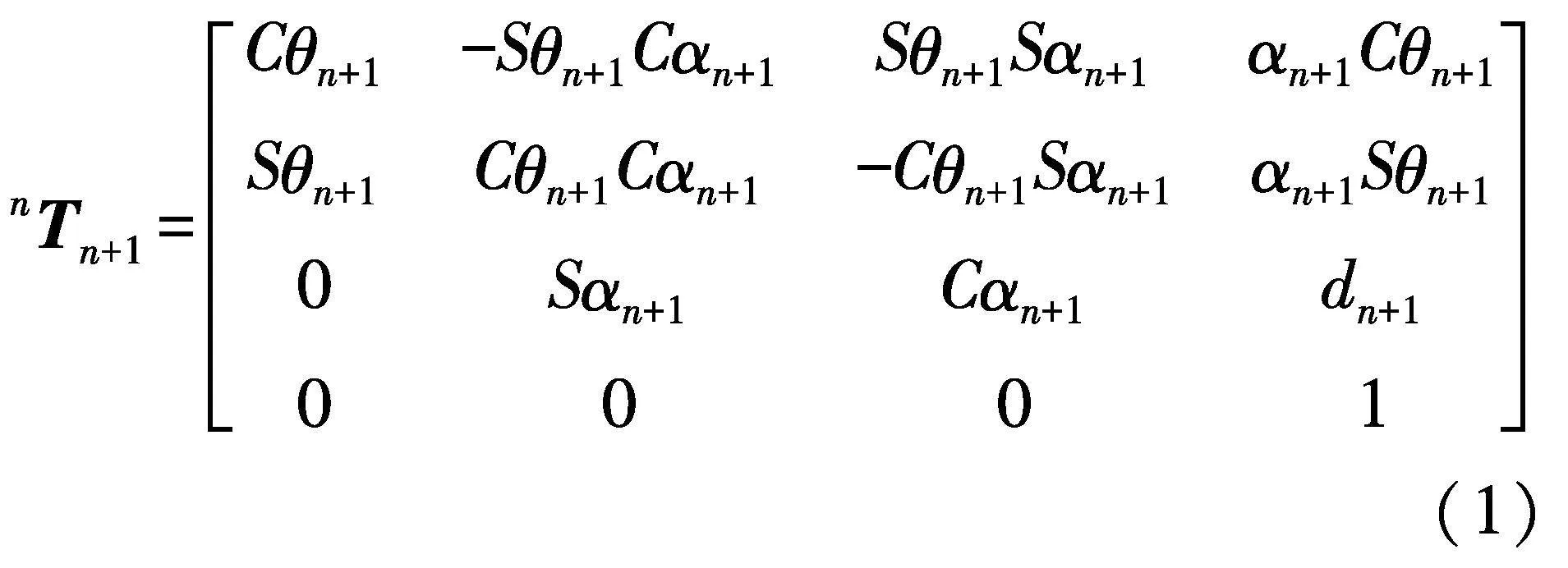
正运动学方程表示所构建的外骨骼机器人连杆模型的足部姿势形态与位置关系,是对外骨骼康复机器人进行运动学分析的基础[7].依据相邻连杆的齐次变换矩阵,外骨骼机器人的各连杆变换矩阵为[8]:
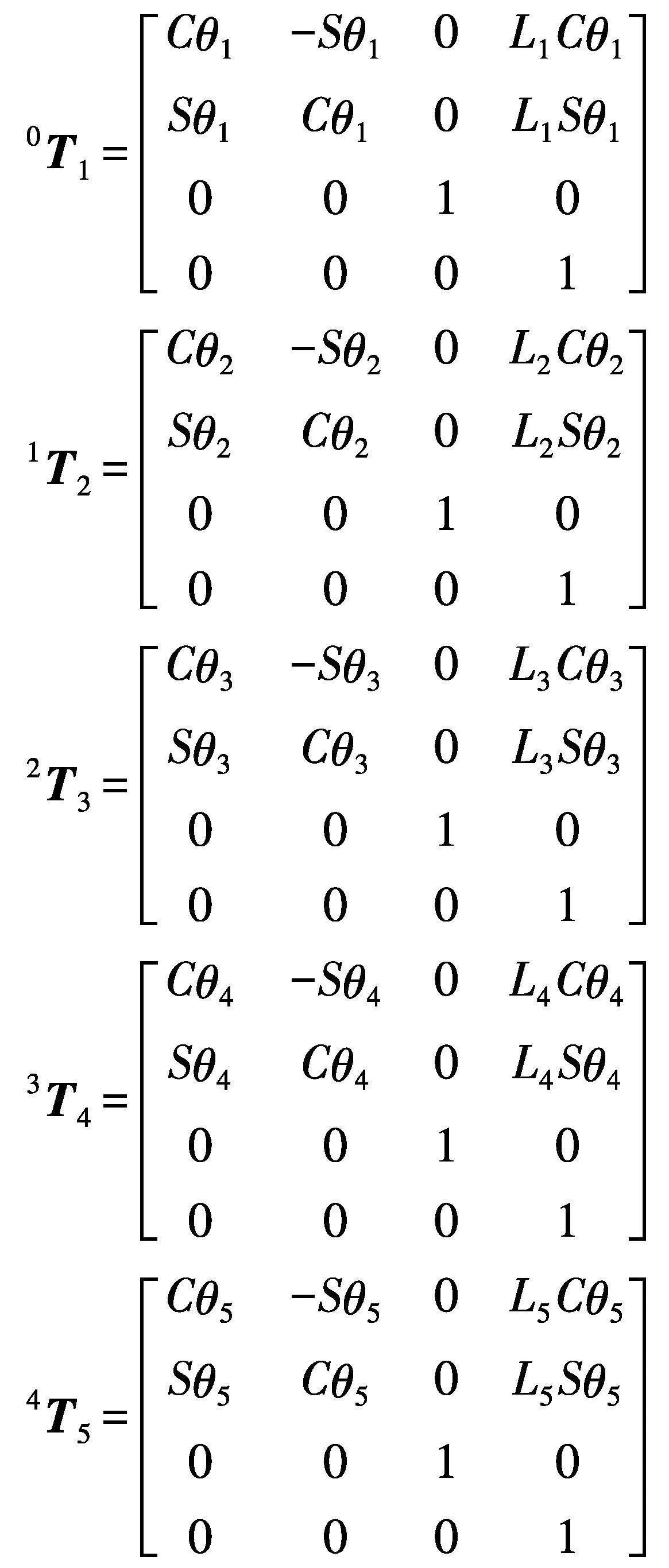
假设外骨骼下肢末端踝关节为H,则外骨骼机器人的各连杆的齐次变换矩阵依次为:
结合上述公式得到外骨骼机器人的正运动学的计算公式为:
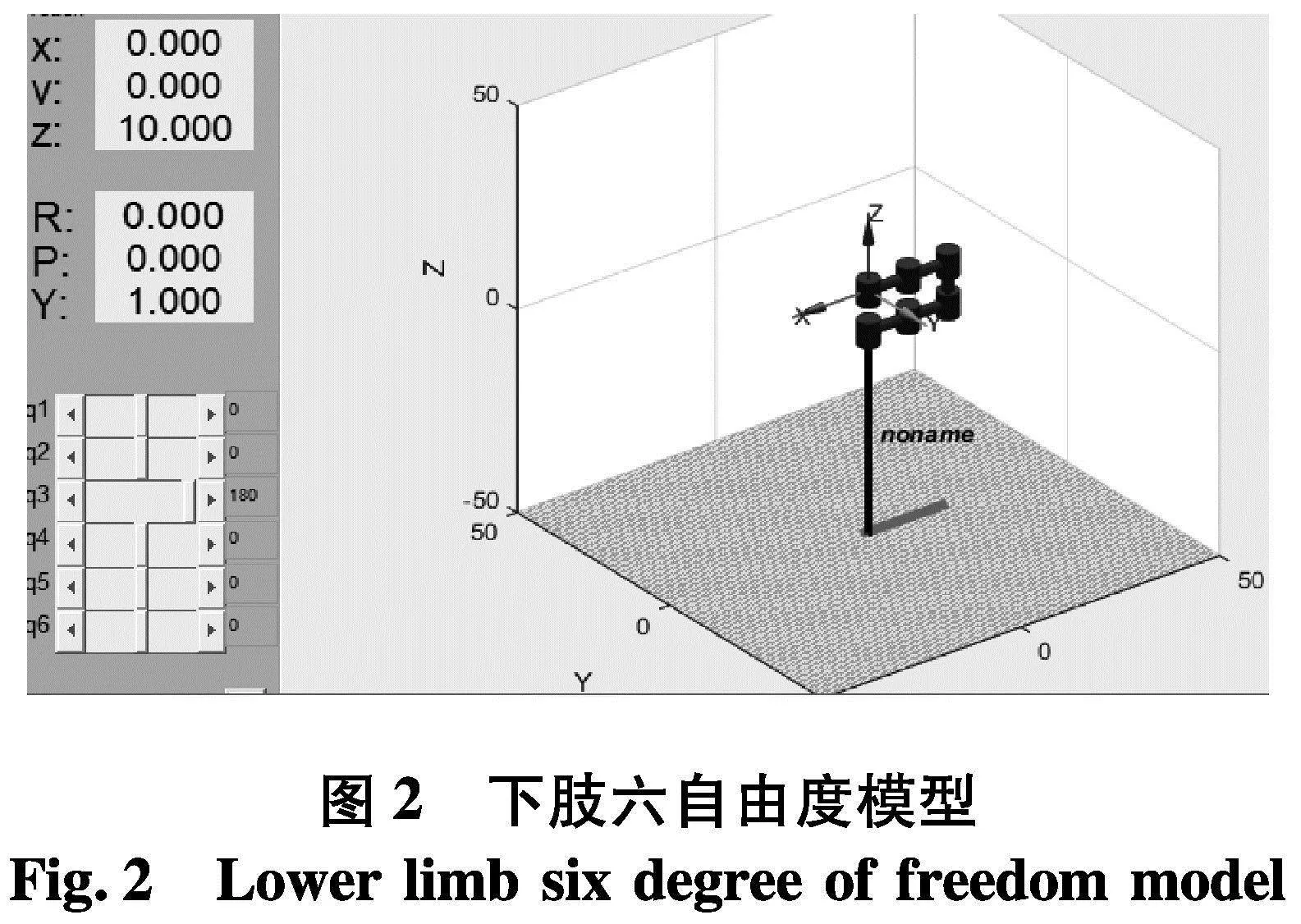
文中选择了正常直立姿势的6个关节角度作为下肢机器人的初始位置,并验证了所创建的五连杆运动模型是否处于直立位置[9],其各个关节角度值为θ1=0,θ2=0,θ3=TC,θ4=0,θ5=0,θ6=0.在 Matlab/Robotics Toolbox工具箱中,根据各关节角度创建的下肢机器人的五连杆模型,如图2.
1.3 动力学计算
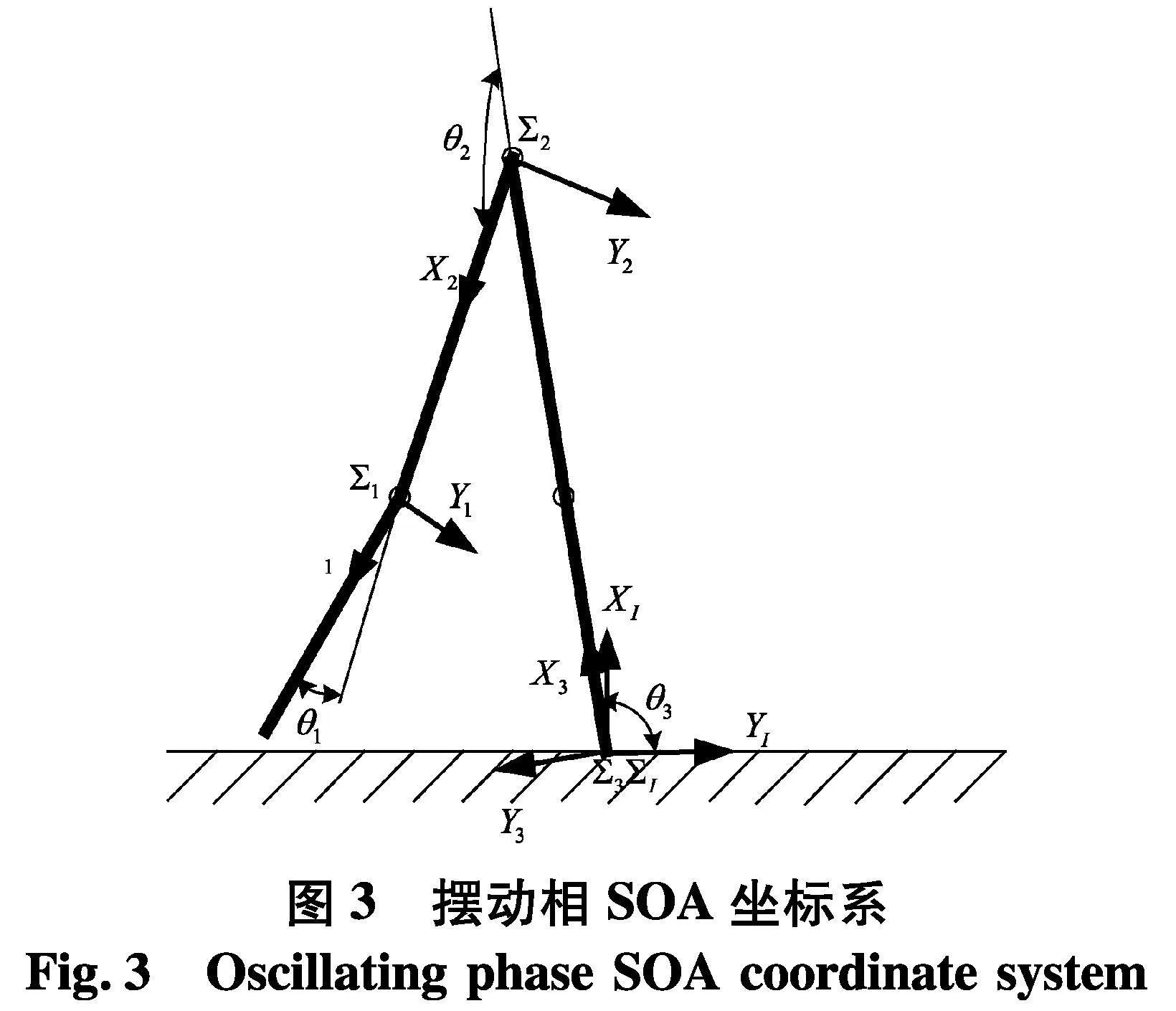
采用一种更高效的建模方法即空间算子代数(SOA)[10],它可以快速地对目标对象进行动力学建模,满足对外骨骼运动特性的研究需要[11].建立如图3三自由度SOA坐标系,假设逆时针为正,确定支撑腿在单腿支撑时绕与地面的固定接触点ΣI的转角、摆动腿和支撑腿之间的夹角以及摆动腿大小腿的夹角,得到θ3、θ2、θ1分别为正、正、负.
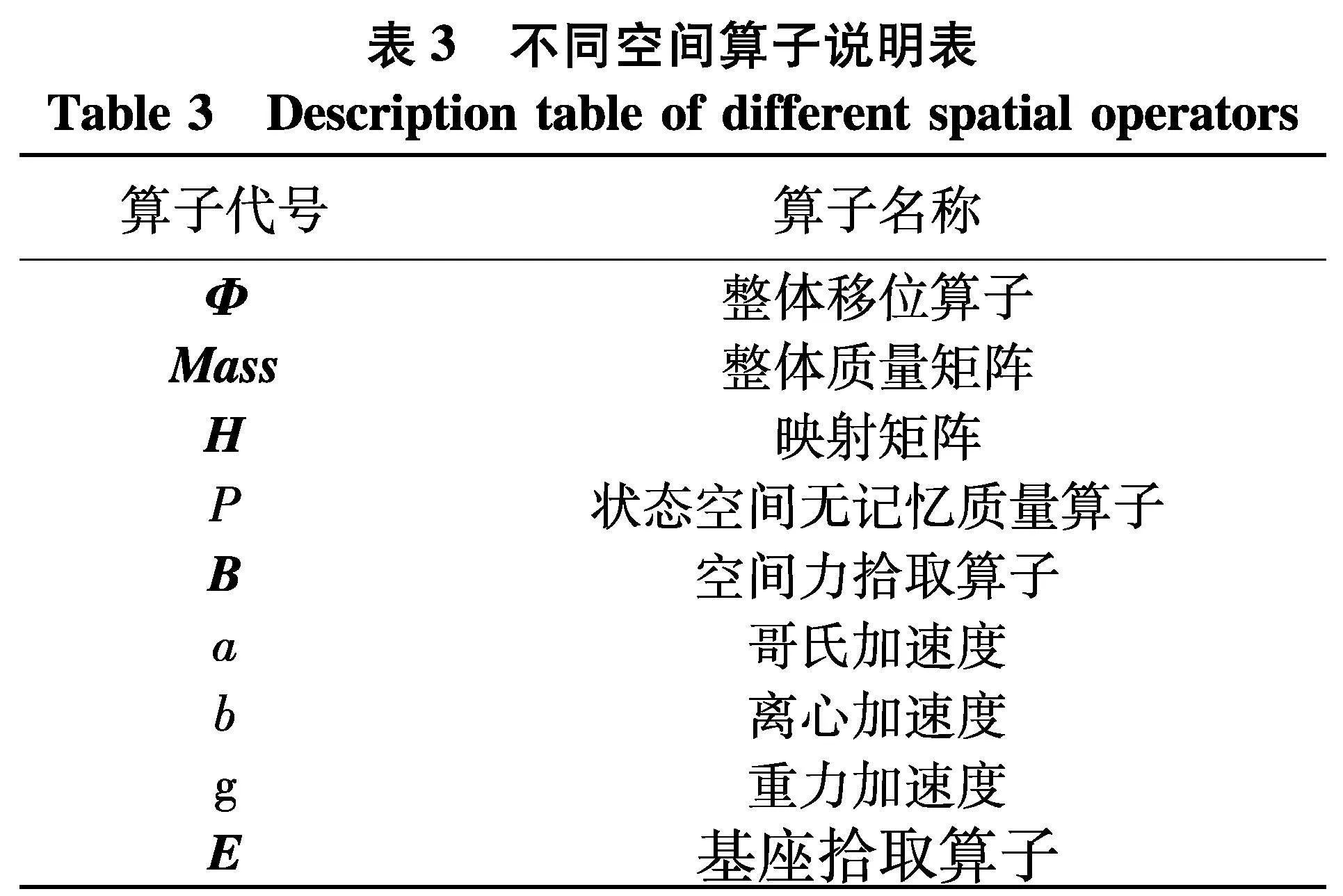
通过构造整体移位算子、加速算子和其他算子之间的关系,建立SOA动力学的标准方程为:
式中:M为广义质量矩阵;C为广义力矩阵;Jac为广义雅可比矩阵;T为所受关节力矩;
其中:
所涉及的基本空间算子含义如表3.
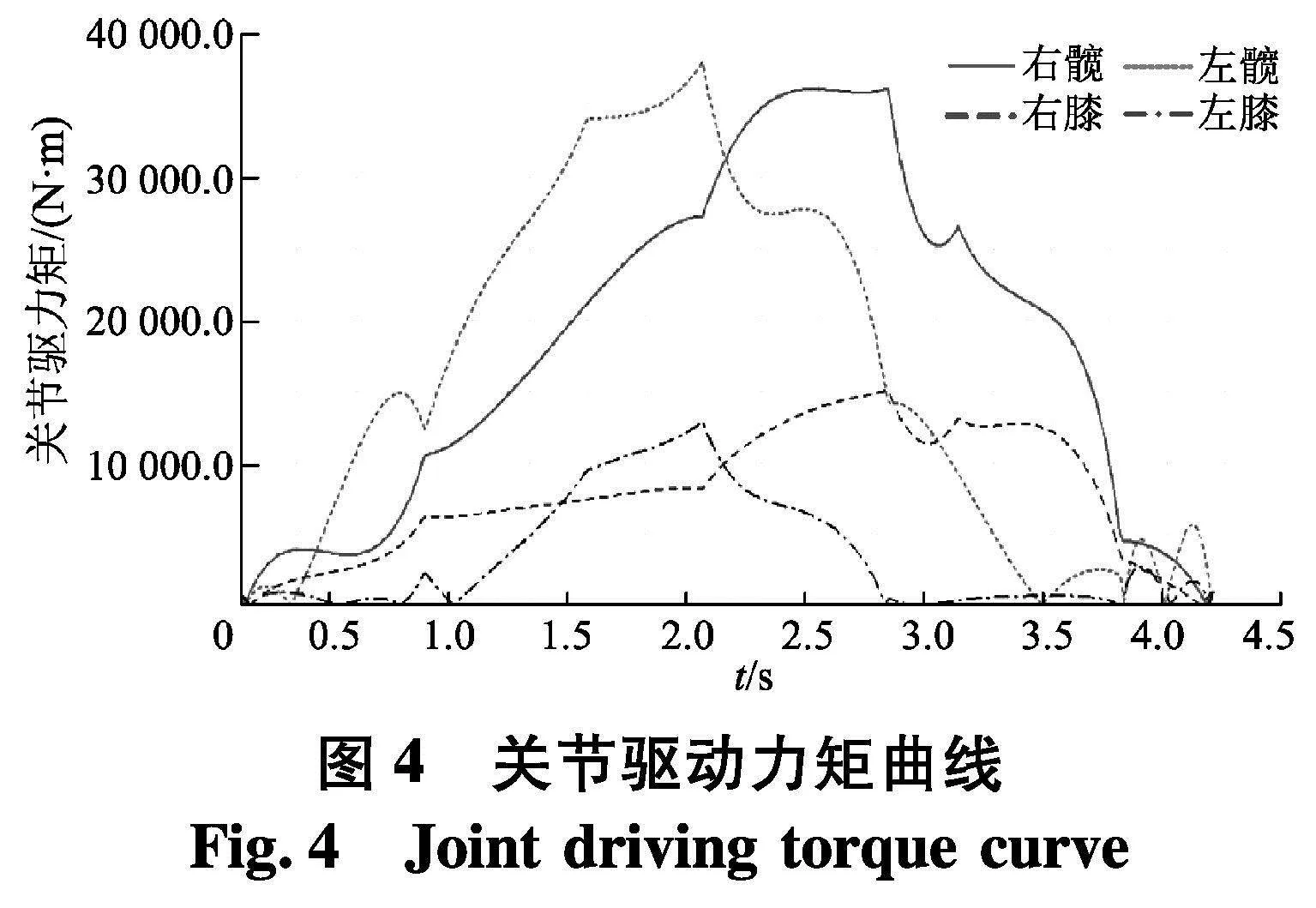
将各基本算子基于外骨骼机器人结构所得的矩阵带入式(3),得到外骨骼三自由度摆动相SOA动力学方程.利用ADAMS进行模型运动步行仿真,为了确保外骨骼的运动轨迹与人体中每个节点的运动轨迹相似,将驱动运动规则应用于外骨骼虚拟样机的活动髋关节和膝关节[12],得到图4关节驱动力矩曲线和图5的角速度与时间关系曲线.
2 下肢外骨骼机器人的控制方法
模糊PID控制[13]可以使用遵循外骨骼运动描述的不同语言,基于外骨骼机器人的运动制定参数调节规则.这些语言顺应规则是相对独立的.使用控制规则之间的模糊连接,可以选择一组相对最优的适合控制外骨骼机器人正常运动的语言,使得控制器可以为外骨骼机器人生成不同的控制参数,并处理不确定环境.
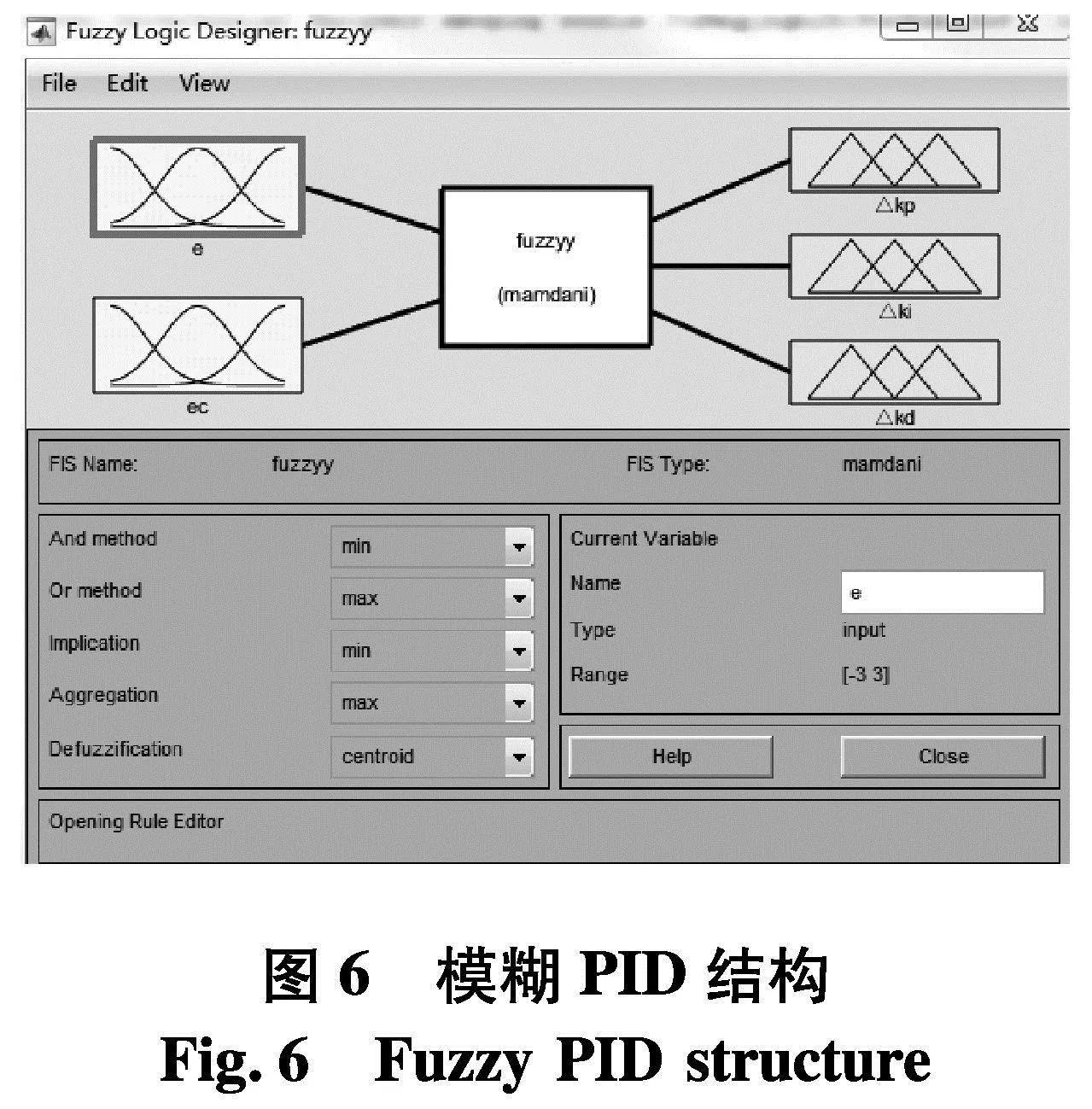
2.1 模糊控制器的结构设计
所采用的模糊PID的结构框图如图6.框图中的ΔKp,ΔKi和ΔKd为模糊控制器根据电机角速度偏差e和角速度ec偏差变化率而得到的输出.经过该控制器,最后的实际输出的表达式为:
Kp=Kp′+ΔKp
Ki=Ki′+ΔKi
Kd=Kd′+ΔKd(4)
2.2 输入输出的模糊化
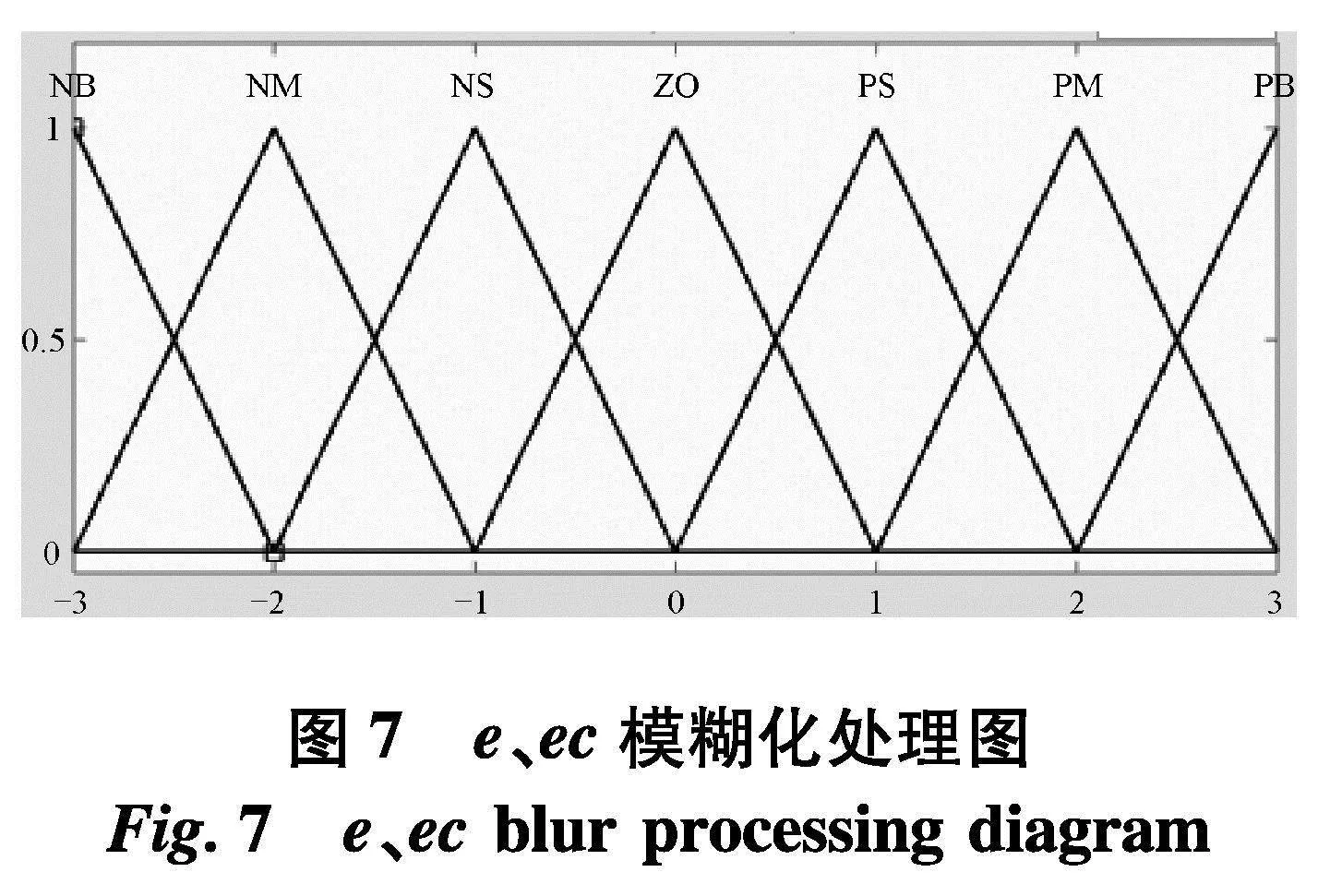
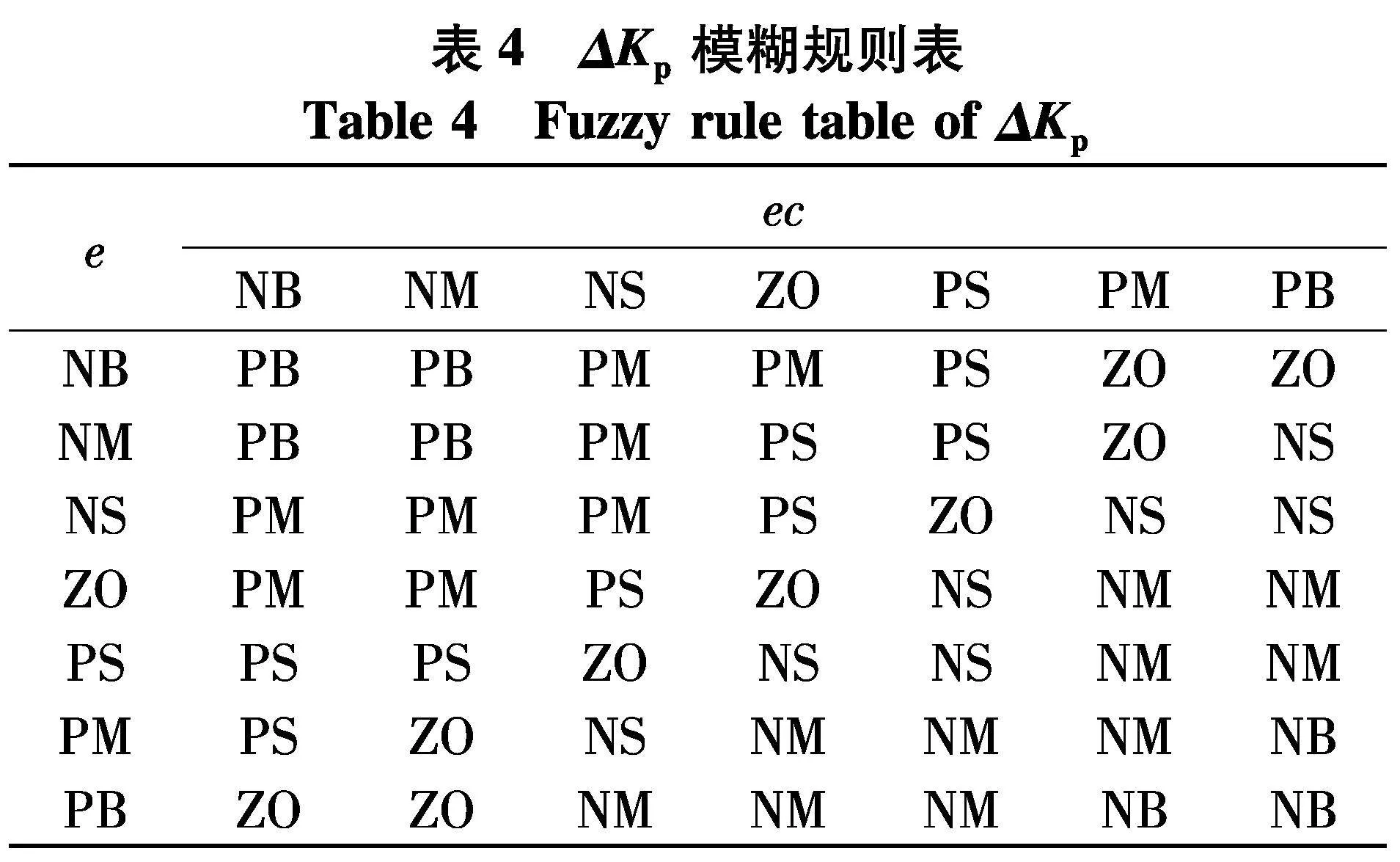
文中选择三角形隶属度函数来分配范围[-3,3]内的模糊子集.根据模糊域的大小,分别选择了7个模糊子集:负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB).模糊化处理图如图7.
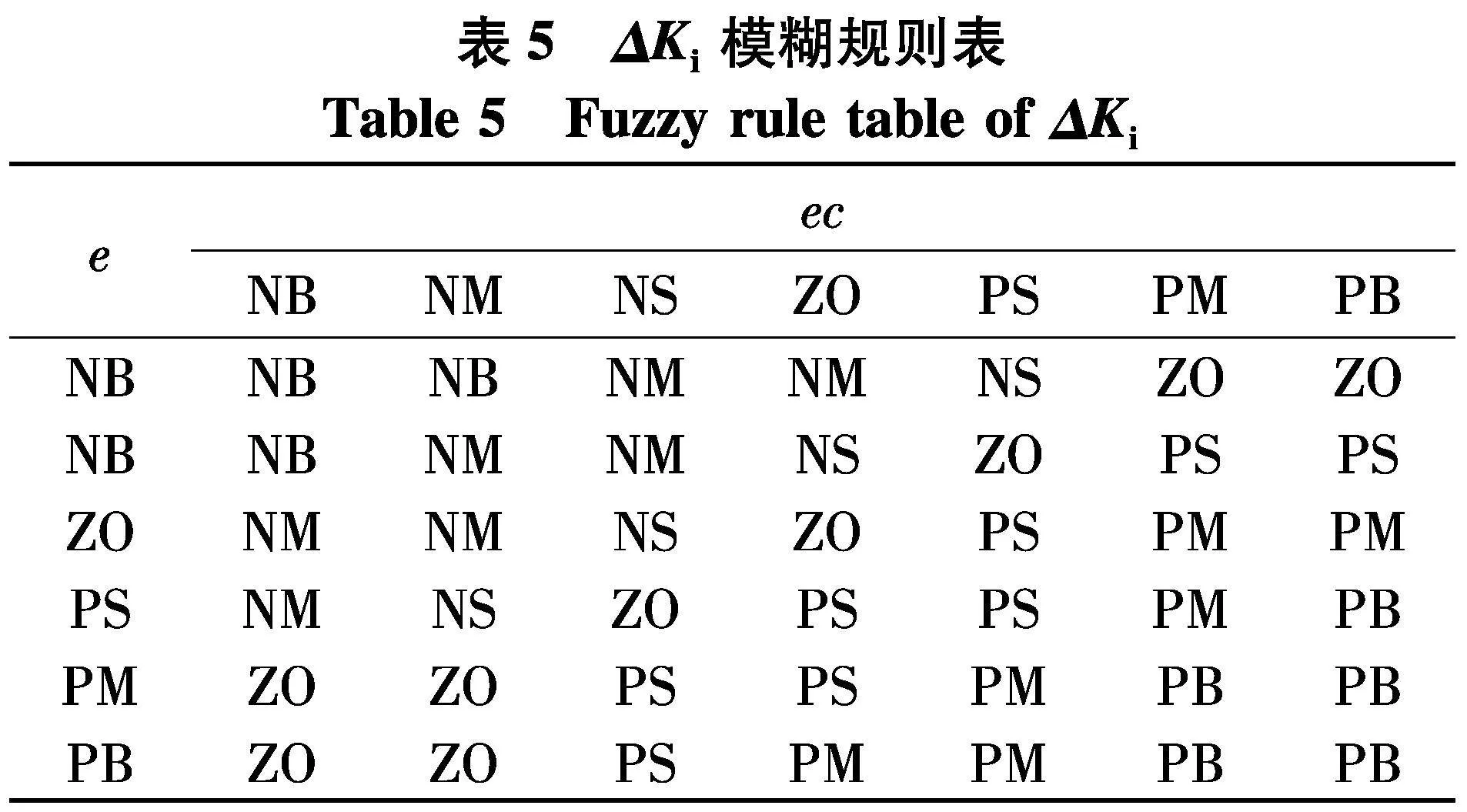
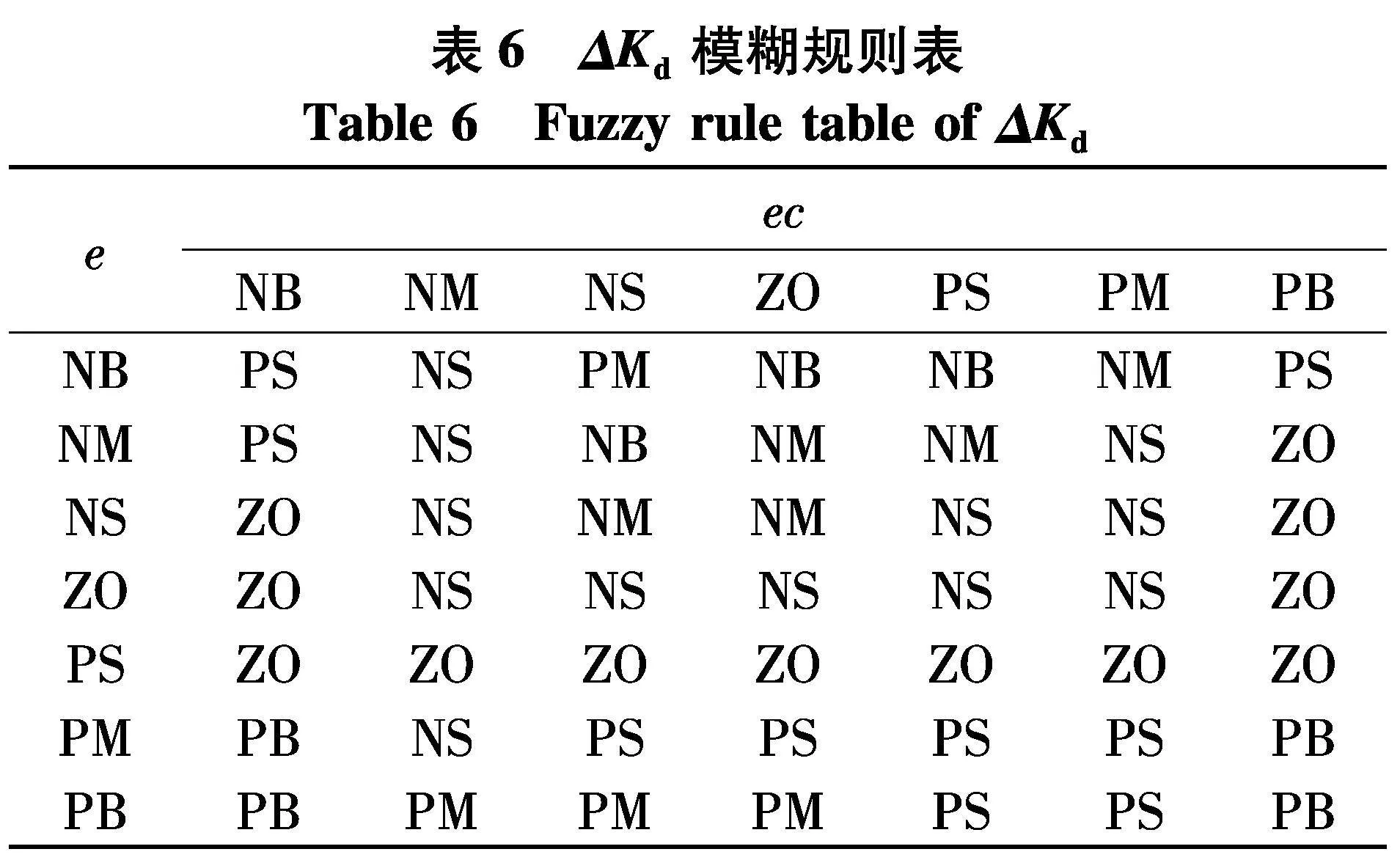
当改变ΔKp,ΔKi和ΔKd时,不可避免的需要考虑不同的参数值的调整对输出的干涉以及每个参数之间相互的影响.选取不同的e与ec,ΔKp,ΔKi和ΔKd所参考的原则[14]如表4~6.
2.3 解模糊化
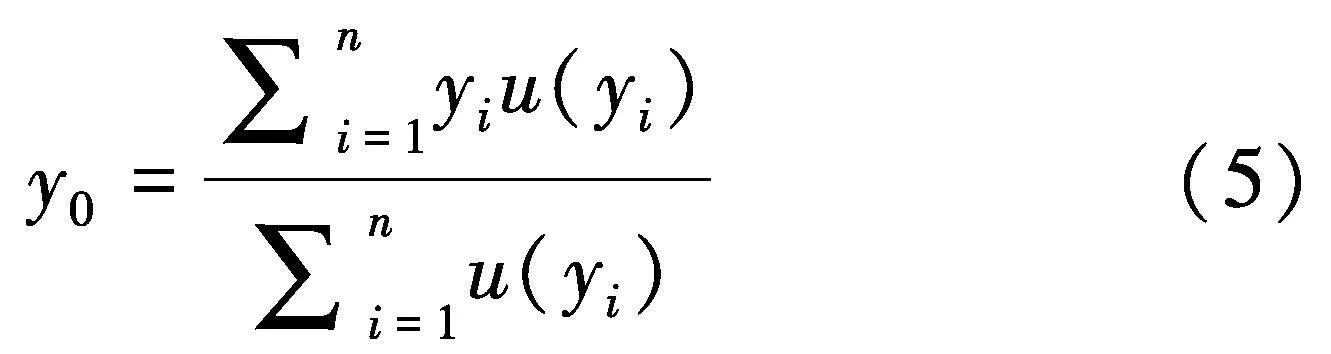
为了对输出量进行解模糊化,选择加权平均法来完成,加权平均法公式为:
式中:n为单点集数目;yi为离散论域的点;u(yi)为响应的权重系数;y0为离散点上重量平均值.
3 控制仿真证明
3.1 模糊控制响应速度实验
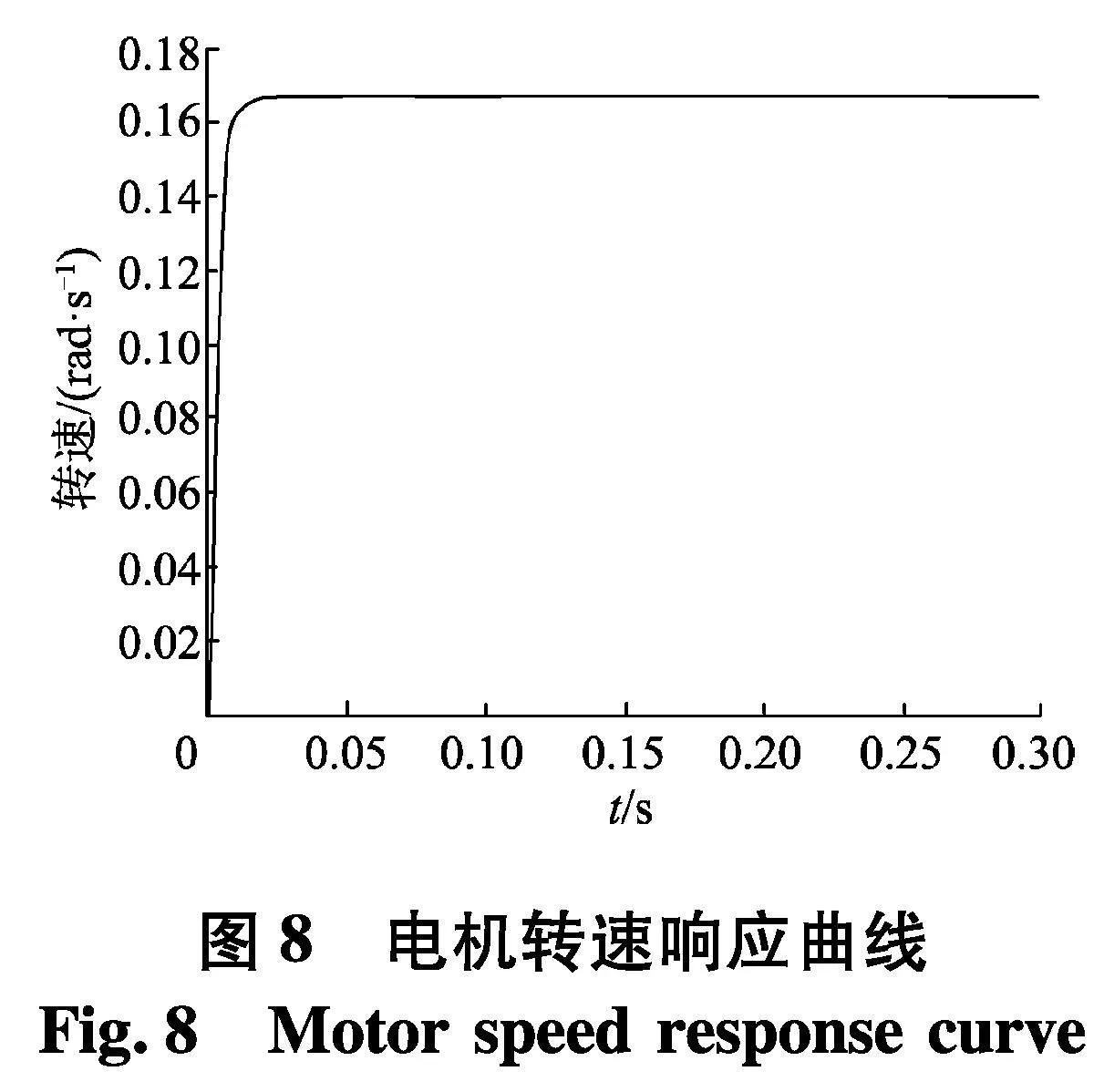
当额定转速为1 000 rad·min-1直流无刷电机,在空载条件下用24 V进行模拟时,对其采用100∶1进行降速,得到最终转速为0.167 rad·s-1.所以调节PID的初始参数K′p,K′i,K′d,使得电机转速能够平滑上升,且最后达到设定的转速.调试得3个参数的大小分别是0.096、79.47、0时,符合要求.得到得模糊PID下的关节电机响应曲线如图8.
当电机在空载状态下达到预定速度值时,大约需要0.025 s,证明了使用模糊PID算法控制关节处无刷直流电机角速度的优越性和有效性.
3.2 算法控制稳定性实验
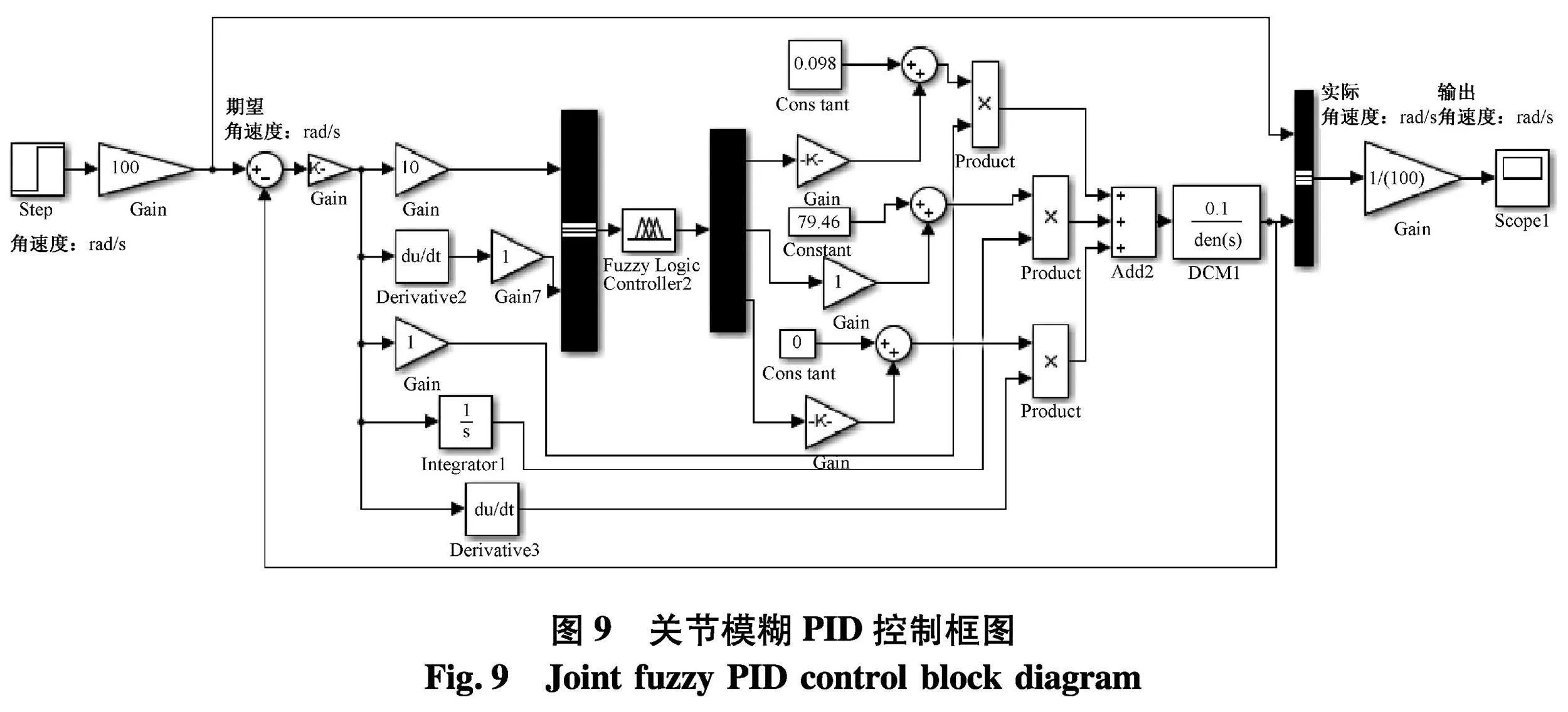
通过Adams和matlab的联合仿真,全面评估了下肢外骨骼机械结构的稳定性和所具有的运动模式[15].用matlab将ADAMS仿真后4个关节电机驱动的角速度曲线(图5)作为控制的阶跃输入,在simulink中搭建了各个关节的模糊PID控制的框图,如图9.
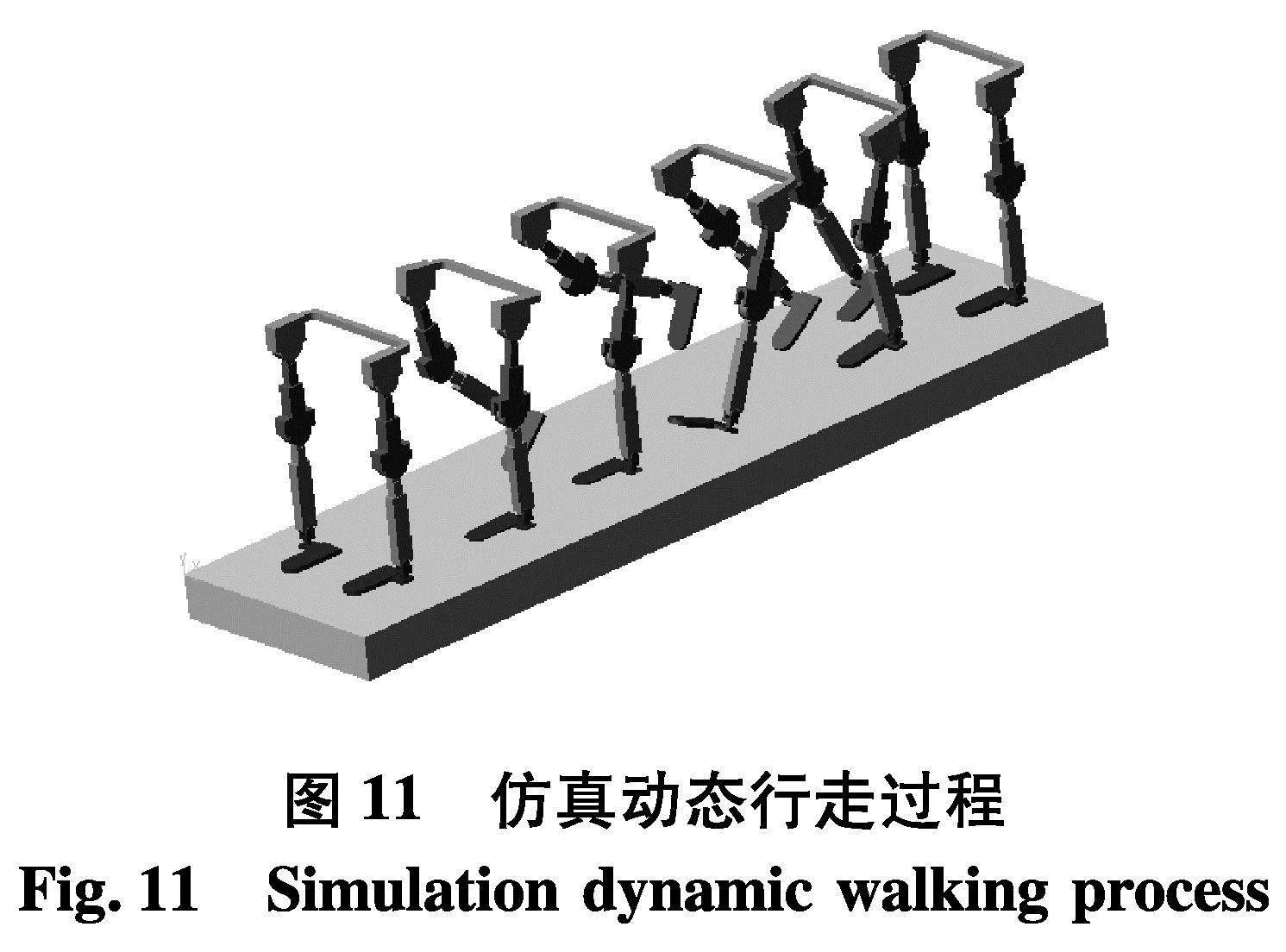
Adams调用matlab控制系统中求解状态方程输出的状态变量,经过计算输出用于驱动外骨骼机器人运动的各个关节的不同扭矩.可以得到联合仿真曲线(图10)和外骨骼机器人从双腿直立开始的一个周期过程变化(图11).
下肢外骨骼机器人的髋关节和膝关节经过模糊PID控制算法的控制,能够稳定协同的工作,外骨骼机器人能够交替行走.图5外骨骼机器人的主要关节的角速度曲线与联合仿真结果图的曲线保持一致,从而证明了模糊PID在外骨骼机器人的控制上具有不错的可行性.
4 结论
为了提高下肢外骨骼机器人的控制精度与响应效率,提出一种基于人机工程学的下肢外骨骼机器人的运动控制方法,构建了下肢外骨骼得结构尺寸,通过模糊PID与人机工程模型,验证了模糊PID算法的对于电机角速度控制的优越性和有效性,从而实现了对下肢外骨骼机器人的控制.
在接下来的研究中,基于文中模型,实现外骨骼的自动避障的功能,优化下肢外骨骼行走的控制效果.
参考文献(References)
[1] 周加永,莫新民,张昂,等.外骨骼助力机器人研究现状与关键技术分析[J].兵器装备工程学报,2016,37(10):99-104.
[2] 周加永,王保华,马佳佳,等.穿戴式助力机器人研究现状及发展趋势[J].机床与液压,2022,50(7):148-157.
[3] 李东.下肢外骨骼机器人人机协调控制研究[D]. 沈阳:沈阳工业大学,2021.
[4] 郗鹏宇. 下肢外骨骼机器人的结构设计与仿真分析[D]. 天津:天津理工大学,2021.
[5] KIM H, SHIN Y J, KIM J. Design and locomotion control of a hydraulic lower extremity exoskeleton for mobility augmentation[J].Mechatronics,2017,46:32-45 .
[6] 赵彦峻,葛文庆,刘小龙,等.外骨骼机器人设计及其机械结构的有限元分析[J].机床与液压,2016, 44(3):10-14.
[7] 宋伟刚. 机器人学: 运动学, 动力学与控制[M]. 北京:科学出版社, 2007.
[8] ZHAO Q, GUO J, ZHAO D, et al. Time-dependent system kinematic reliability analysis for robotic manipulators[J]. Journal of Mechanical Design, 2021:143(4).
[9] 陈梁军.外骨骼机器人仿人运动姿态建模及控制仿真研究[D].合肥:合肥工业大学,2017.
[10] 谭文,唐小山,罗健,等.基于空间算子代数理论的多体系统雅可比矩阵及其逆的描述与实现[J].湖南科技大学学报(自然科学版),2015,30(3):68-75.
[11] ASANO F. Stability analysis of underactuated compass gait based on linearization of motion[J]. Multibody System Dynamics,2015,33(1):93-111.
[12] 段启超,赫东峰,刘波,等.下肢外骨骼机器人人机约束模型建立及分析[J].机械设计与制造工程,2015,44(1):50-53.
[13] PAN D, FENG G, MIAO Y, et al. Co-simulation research of a novel exoskeleton-human robot system on humanoid gaits with fuzzy-PID/PID algorithms[J]. Advances in Engineering Software, 2015,79:36-46.
[14] 徐志书,李超,何雨昂.基于Matlab/Simulink方波直流无刷电机位置伺服仿真研究[J].电子技术与软件工程,2016(10):136-137.
[15] 曹志刚,叶晓东,王玉成,等.基于卡尔曼预测的外骨骼摆动腿随动控制研究[J].科学技术与工程,2016,16(29):96-101.
