微小型陆空两栖机器人地面移动控制方法
2015-07-09朱航等
朱航等


摘 要: 针对复杂环境中移动机器人的越障需求,设计一种微小型陆空两栖机器人,构建控制系统,建立机器人地面移动运动学模型。基于平方根球面单形无色卡尔曼滤波器进行位姿状态估计,采用模糊PID实现了机器人的运动控制。仿真实验结果表明,该控制方法能够有效地控制机器人的运动。
关键词: 陆空两栖机器人; 运动学模型; SR?SSUKF; 模糊PID
中图分类号: TN919?34; TP317.4 文献标识码: A 文章编号: 1004?373X(2015)08?0054?04
Terrestrial locomotion control method of miniature land?air hybrid robot
ZHU Hang, SHI Jia?dong, WANG Jian?zhong, MA Jian
(State Key Laboratory of Explosion Science and Technology, Beijing Institute of Technology, Beijing 100081, China)
Abstract: In order to meet the need of obstacle crossing for mobile robot in complex environment, a miniature land?air hybrid robot and its control system were designed. Kinematic model of terrestrial locomotion of the robot was set up. Robots position and orientation estimation was achieved by using square root spherical simplex unscented Kalman filter. Motion control of the robot was realized by fuzzy PID. Simulation results show that the control method can effectively control the movement of the robot.
Keywords: land?air hybrid robot; kinematic model; SR?SSUKF; fuzzy PID
随着机器人性能不断地提高,移动机器人的应用范围大为扩展,不仅在工业、农业、医疗、服务等行业中得到广泛的应用,而且在城市安全、国防和空间探测等领域得到很好的应用。轮式行驶机构由于其结构简单、控制性能好、行进速度和效率高等优点,是地面移动机器人最常采用的形式之一[1?2]。然而普通轮式移动机器人所能翻越的障碍高度受到车轮直径限制,制约了其在复杂环境中的应用。因此,提高轮式移动机器人的越障能力具有重要的意义。本文设计了一种微小型陆空两栖机器人,机器人在一般情况下以地面模式移动,当遇到难以逾越的障碍时,能迅速转换到飞行模式越过障碍。建立了机器人地面移动运动学模型,基于平方根球面单形无色卡尔曼滤波器实现了机器人速度和角速度控制,并进行了仿真实验。
1 微小型陆空两栖机器人
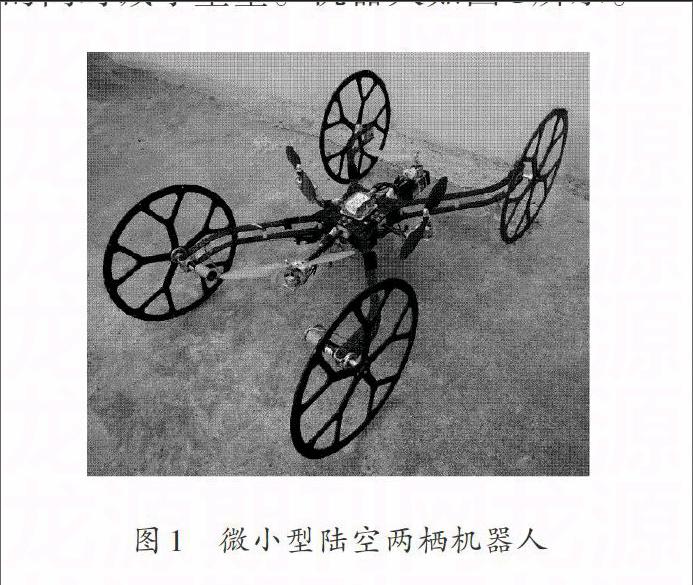
机器人主要由地面移动机构、飞行机构、控制系统、数据收发系统和电源等组成。地面移动机构为四轮两驱构型,飞行机构为四旋翼构型。四个车轮与四副旋翼呈十字交叉形布置。机器人车架为“X”形,车轮安装在车身骨架外伸的末端。车架及车轮大量采用碳纤维材料,并在部分结构薄弱处安装支撑架,在保证机器人整体强度的同时减小重量。机器人如图1所示。
机器人控制系统主要由遥控终端、控制器及传感器件等组成,如图2所示。其中,传感器件包括惯性测量单元、测高计、转速传感器等。控制系统由传感器件组成闭环,实现对机器人位姿的精确可靠控制。
2 地面移动运动学模型
机器人地面移动系统为四轮结构,其中两轮驱动,两轮从动。运动模型如图3所示。其中机器人轴距L=600 mm,前轴到重心的距离a=300 mm,后轴到重心的距离b=300 mm,轮距2c=494 mm,车轮半径r=150 mm。
