2024年高考物理模拟试题
2024-07-01余建刚林灏
余建刚 林灏


一、单选题(本大题共7小题,每小题4分,共28分. 在每个小题给出的四个选项中,只有一个符合要求)
1.原子处于磁场中,某些能级会发生劈裂. XX代表激发态1,X代表激发态2,G代表基态,由于精细结构劈裂,X态劈裂为两支,分别为XH、XV两个能级图. 如图所示,原子劈裂前辐射光谱线①和②,劈裂后辐射出光谱线③④⑤和⑥,则下列说法正确的是( )
A.①和③的能量相等
B.③的频率大于⑤的频率
C.③和④的频率之和等于⑤和⑥的频率之和
D.若用④照射某种金属能发生光电效应,则用⑥照射也一定能发生
2.足球场上,某运动员进行“边路突破”训练,沿边线将足球向前踢出,为控制足球,又向前追赶足球,下列v-t和s-t图像能大致反映此过程的是( )
3. 如图甲所示,用瓦片做屋顶是我国建筑的特色之一. 铺设瓦片时,屋顶结构可简化为图乙所示,建筑工人将瓦片轻放在两根相互平行的檩条正中间后,瓦片静止在檩条上. 已知檩条间距离为d,檩条与水平面夹角均为θ,最大静摩擦力等于滑动摩擦力. 下列说法正确的是( )
A. 仅减小θ时,瓦片与每根檩条间的摩擦力的合力变大
B. 仅减小θ时,瓦片与每根檩条间的弹力的合力变小
C. 仅减小d时,瓦片与每根檩条间弹力变大
D. 仅减小d时,瓦片可能会下滑
4.如图所示为一半径为R =6 cm的透明半球体,PQ为半球体的直径,O为半球体的球心. 现有一束激光保持垂直半球球的平面处射入半球体,入射点从P点沿直径PQ方向缓慢向Q点移动. 发现当入射点移动2 cm后,才开始有光线从球冠射出,(不考虑光线在半球体内多次反射),则该半球体的折射率为( )
A.23 B.32 C.34 D.43
5.某同学自己绕制了两个线圈套在可拆变压器的铁芯上,组成了一个新变压器,如图甲所示,线圈a作为原线圈连接到学生电源的交流输出端,原、副线圈的匝数比为3:1,电源输出的电压如图乙所示,线圈b接小灯泡. 若他组成的新变压器可视为理想变压器,则下列说法不正确的是( )
A.电源输出电压的频率为50Hz
B.若小灯泡两端并联一个电阻,电源的输出功率增大
C.若小灯泡两端并联交流电压表,则此电压表示数为12V
D.将线圈a改接在学生电源的直流输出端,小灯泡也能发光
6. 1930年,物理学家劳伦斯发明了世界上第一台回旋加速器,因此获得1939年诺贝尔物理学奖. 回旋加速器的基本结构如图所示,两个正对着的D型金属盒处在垂直底面的匀强磁场中,两个D型盒之间的狭缝连接高压交流电源,整个装置处在真空环境中,实现对带电粒子的加速,且加速过程中忽略相对论效应和重力的影响. 下列说法正确的是( )
A.带电粒子加速获得的能量来自于磁场
B.随着带电粒子的加速,带电粒子在磁场中做圆周运动的周期将减小
C.仅增大D型盒的半径,带电粒子加速所获得的最大动能增大
D.加速质子(11H)的交流电,也可以用来加速氘(21H)原子核
7. 篮球运动员做定点投篮训练,篮球从同一位置投出,且初速度大小相等,第1次投篮篮球直接进篮筐,第2次篮球在篮板上反弹后进筐,篮球反弹前后垂直篮板方向分速度等大反向,平行于篮板方向分速度不变,轨迹如图所示,忽略空气阻力和篮球撞击篮板的时间,关于两次投篮说法正确的是( )
A. 两次投篮,篮球从离手到进筐的时间相同
B. 篮球第1次上升的最大高度比第2次的大
C. 篮球经过a点时,第1次的动能比第2次的大
D. 篮球两次进筐时,在竖直方向分速度相同
[CS%100,0,0,0]二、多项选择题:本题共3小题,每小题6分,共18分. 在每小题给出的四个选项中,有多项符合题目要求. 全部选对的得6分,选对但不全的得3分,有选错的得0分.
8. “弩”是古代的狩猎工具,某工匠复原古代的 “弩”并试射,将弩箭(弩箭可视为质点)以80m/s的初速度水平射出,成功击中距其射出位置水平距离为20m处的目标. 已知重力加速度g=10m/s2,忽略空气阻力,下列说法正确的是( )
A.弩箭飞行过程中机械能逐渐增大
B.弩箭被射出过程中,弩箭动能的增加量等于弓弩弹性势能的减小量
C.弩箭被射出后,在空中飞行的时间为0.5s
D.弩箭射出时的位置比目标高约0.31m
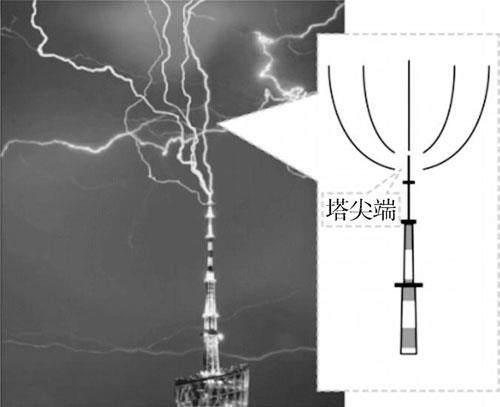
9. 如图所示,是闪电击中广州塔的画面,广州塔的尖顶是一避雷针,雷雨天气时,低端带负电的云层经过避雷针上方时,避雷针尖端放电形成瞬间强电流,云层所带的负电荷经避雷针导入大地,在此过程中,下列说法正确的是( )
A. 云层靠近避雷针时,针尖感应出正电荷
B. 向塔尖端运动的负电荷受到的电场力越来越小
C. 越靠近避雷针尖端,电场强度越大
D. 向塔尖端运动的负电荷电势能减小
10.摩托车和汽车上装有的磁性转速表的结构原理图如图所示,转轴Ⅰ随待测物沿图示方向旋转,永磁体同步旋转. 铝盘、游丝和指针固定在转轴Ⅱ上,铝盘靠近永磁体,当待测物以一定的转速旋转时,指针所指的刻度盘刻度即对应被测物的转速.下列说法正确的是( )
A.铝盘接通电源后,通有电流的铝盘才会在磁场作用下带动指针转动
B.永磁体转动时,铝盘中产生感应电流,感应电流使铝盘受磁场力作用而转动
C.刻度盘上的零刻度线应标在刻度盘的中央
D.若去掉游丝和指针,使转轴Ⅱ可以无阻碍地自由转动,铝盘就能同永磁体完全同步转动
三、非选择题:本题共5小题,共54分.
11.(7分)某探究小组探究利用单摆装置测重力加速度,如图甲所示,细线端拴一个球,另一端连接拉力传感器,固定在铁架台上,将球拉开一个很小的角度静止释放,传感器可绘制出球在摆动过程中细线拉力周期性变化的图像,如图乙所示.
(1)由图乙可得该单摆的运动周期T为 s(结果保留两位有效数字).
(2)在摆球自然悬垂的状态下,用毫米刻度尺量取从悬点到摆球最顶端的长度l=990.6mm;用游标卡尺测量摆球的直径,示数如图丙,则摆球直径d= mm,摆长为L= mm.
(3)根据单摆周期公式,可得重力加速度g= (用题中所给字母表示),测的当地重力加速度值为 (结果保留三位有效数字).
(4)若摆线上端悬点未固定好,摆动中出现松动,则测得重力加速度值比真实值偏 .
12.(9分)电子秤是人们生活中常用的一种称量工具,某科技小组制作了一台简易电子秤,原理图如图甲所示,电压表可视为理想电压表(量程为3V),滑动变阻器的最大阻值为R0=27Ω,滑动变阻器滑片P能滑动最大距离为l=3cm.
(1)该小组先利用如图乙所示电路测定电子秤里1节纽扣电池的电动势和内阻,改变电阻箱R的阻值,得到多组数据作出图像,如图丙所示,已知直线纵截距为13,斜率为16. 若电流表内阻可忽略,由图像可知纽扣电池的电动势E= V,内阻r= Ω(结果保留两位有效数字);若电流表内阻不可忽略,则电动势的测量值 真实值,内阻的测量值 真实值(选填“大于”、“等于”或“等于”).
(2)该小组探究电压表的示数U与被测物体质量m之间的关系,设计了如上图所示实验,已知轻弹簧与托盘的电阻忽略不计:
①调节图甲中滑片P的位置,使电压表的示数恰好为零;
②在托盘里缓慢加入细砂,直到滑片P恰好滑到滑动变阻器的b端,然后调节电阻箱R,直到电压表示数U=2V,且弹簧一直处于弹性限度内,则此时电阻箱的读数为R= Ω;
③若所用弹簧的劲度系数k=2.94×103N/m,重力加速度g=9.8m/s2,则该电子秤所能称量的最大质量m= kg;
(3)由此可得,电压表的示数U与被测物体质量m之间的关系式为U= . (用题目中给出的物理量符号表示)
13.(9分)空气炸锅是一种新型的烹饪工具,如右图所示为某型号空气炸锅的简化模型图,空气炸锅中有一气密性良好的内胆,内胆内的气体可视为质量不变的理想气体,初始气体压强为p0、温度为T0,现启动加热模式使气体温度升高到43T0,此过程中气体吸收的热量为Q,内胆中气体体积不变,求:
(1)封闭气体的压强p;
(2)气体的内能变化了多少?
14.(11分)2023年11月,首台国产质子治疗装置在上海正式走向临床治疗(如图甲所示),该装置主要原理是质子加速后汇聚到圆柱形管道中轴线成质子束,然后经高能运输线运送至各治疗室.现有质子加速后,沿圆柱形管道中轴线OO′以v0=2×108m/s匀速运动.如图乙现由于某些客观原因,管道需要“拐弯”到另一对接管道,该管道与原管道夹角60°,现再“拐弯”处矩形ABCD区域内,加上电场或磁场,使得管道中质子从该区域射出时刚好沿对接管道的中轴线运动运动(如图为从ED的中点并与水平方向成60°沿图中方向射出).下面有两种设计方案:
(已知:BD=ED=d=0.5m,质子电荷量q=+1.6×10-19C,质子质量m=1.6x10-27kg)
(1)方案一:在矩形ABCD区域,区域内设计一沿AC方向的匀强电场,使质子最终从ED的中点并与水平方向成60°沿图中方向射出,求所需的电场强度多大,AB与CD间需施加多少电压?
(2)方案二:矩形ABCD区域,区域设计一垂直ABCD所在平面的匀强磁场,使质子最终从ED的中点并与水平方向成60°沿图中方向射出,求所需的磁场强度B的大小和方向?
(3)你认为这哪种方案更符合实际情况,便于实施,简要说明理由.
15. (15分)智能机器人自动分拣快递包裹被赋予“惊艳世界的中国黑科技”称号.分拣机器人工作效率高,落袋准确率达 99.9%.在供包台工作人员将包裹放在机器人的水平托盘上,智能扫码读取包裹目的地信息,经过大数据迅速分析后生成最优路线,将包裹自动送至方形分拣口.当抵达目的地分拣口时,翻转托盘使托盘倾角缓慢增大,直至包裹滑下,将包裹投入分拣口中(如图甲).(最大静摩擦力近似等于滑动摩擦力,重力加速度g取10 m/s2).如图乙所示,机器A把质量m=1kg的包裹从分拣处运至直线相距L=45m的投递口处,在运行过程中包裹与水平托盘保持相对静止.已知机器人运行最大加速度a=3m/s2,运行最大速度v0=3m/s.
(1) 求A从分拣处运行至投递口所需的最短时间t;
(2) 若包裹与水平托盘的动摩擦因数为μ=33,则在机器人到达投递口处,要使得包裹刚开始下滑,托盘的最小倾角θ应该是多少;
(3)机器人A投递完包裹后返回分拣处途中发生故障,自动机器人立刻制动程序,制动时速度为3m/s,由于惯性,机器人制动后再地面滑行4.5 m后停下来,此时刚好有另一机器人B,以最大速度碰撞3m/s与机器人A发生弹性碰撞,碰撞后机器A滑行了2 m停下来.则机器人B的总质量是机器人的A的多少倍?
参考答案
一、单选题(本大题共7小题,每小题4分,共28分.在每个小题给出的四个选项中,只有一个符合要求)
1.C
【解析】因原子能级跃迁放出的光子的能量等于原子的能级差,由题图可知光子①、③对应的能量关系为 E③<E①,A项错误;由题图可知光子③、⑤对应的能量关系为 E③<E⑤,由光子能量E=hν,③的频率小于的⑤频率,B项错误;XX态能级与基态能级差保持不变,故③和④的频率之和等于⑤和⑥的频率之和,C项正确;由光子能量E=hν,和E④>E⑥,知用④照射该金属表面时能发生光电效应,可知E④大于此金属的逸出功W0,因E⑥<E④,则无法比较E⑥与W0的大小关系,故用⑥照射该金属不一定能发生光电效应,D项错误.
2.C
【解析】AB.运动员将足球向前踢出,由于地面有阻力作用,足球做匀减速运动,运动员向前追赶做加速运动,故AB错误;
CD.s-t图像的斜率表示速度,足球做减速运动,运动员做加速运动,且踢球时两者在同一位置,故C正确,D错误.故选C.
3.D
【解析】CD.檩条给瓦片的支持力如下图所示
两檩条给瓦片的支持力与檩条垂直向上的夹角为α,则有
2Fcos α=mgcos θ
若仅减小檩条间的距离d时,夹角α变小,则两檩条给瓦片的支持F力变小,故瓦片与每根檩条间的弹力变小,最大静摩擦力变小,则瓦片可能下滑,故C错误,D正确;
AB.若仅减小θ时,根据
f=mgsinθ
可知瓦片与檩条间的摩擦力的合力变小,根据
2Fcos α=mgcos θ
可知若仅减小θ时,瓦片与檩条间的弹力的合力变大,故AB错误.故选D.
4.B
【解析】由题意作出光路图,如图所示设射点移动2cm,该入射点位置为A,此时入射角为C.
由几何关系可知OA=0.6cm-0.2cm=0.4cm
sinC=OAR=23.
则由全反射规律,可知sinC=1n.
得n=32.
5.D
【解析】A.由图可知,电源输出电压的频率为
f=1T=10.02Hz=50Hz
故A正确,不符合题意;
B.原线圈电压有效值
U1=3622V=36V
根据
U1U2=n1n2
U2=12V
故B正确,不符合题意;
C.若小灯泡两端并联交流电压表,则此电压表示数为
U2=12V
故C正确,不符合题意;
D.理想变压器是传输交流电,因此原线圈接直流电无作用,故D错误,符合题意.
故选D.
6.C
【解析】A.洛伦兹力永远不做功,带电粒子加速获得的能量来自于电场,A项错误;
B.根据洛伦兹力提供向心力可得
qvB=mv2πT
解得
T=2πmqB
粒子在磁场中做圆周运动的周期与粒子的速度无关,B项错误;
C.根据
qvB=mv2R
得
v=qBRm
当粒子做圆周运动的半径增大时,速度增大,动能增大,运动的半径最大时,粒子运动的速度最大,动能最大,因此仅增大D型盒的半径,带电粒子加速所获得的最大动能增大,C项正确;
D.为保证粒子经过电场获得加速,交流电的周期要与圆周运动的周期相等,11H与21H在磁场中做圆周运动的周期不同,则加速它们的交流电周期也不同,D项错误.
故选C.
7.B
【解析】B.第2次篮球在篮板上反弹后进筐,篮球反弹前后垂直篮板方向分速度等大,若没有篮板,篮球水平位移较大,又由于两次初速度大小相等,所以第2次篮球水平初速度较大,竖直分速度较小,篮球第1次上升的最大高度比第2次的大,故B正确;
A.竖直方向上,根据
x=v竖直t-12gt2
第1次篮球从离手到进筐的时间较大,故A错误;
C.初动能相等,篮球经过a点时,重力势能相等,根据机械能守恒,第1次的动能等于第2次的动能,故C错误;
D.篮球两次进筐时,水平方向分速度不同,在竖直方向分速度不同,故D错误.
故选B.
二、多项选择题:本题共3小题,每小题6分,共18分.在每小题给出的四个选项中,有多项符合题目要求.全部选对的得6分,选对但不全的得3分,有选错的得0分.
8.BD
【解析】A.弩箭飞行过程中,只有重力做功,机械能守恒,故A错误;
B.弩箭被射出过程中,由能量守恒定律,弩箭动能的增加量等于弓弩弹性势能的减小量,故B正确;
C.弩箭做平抛运动,水平方向上有
t=lv0=2080s=0.25s
故C错误;
D.驽箭射出时的初始位置在竖直方向上应高出目标的距离为
y=12gt2=0.3125m≈0.31m
故D正确.故选BD.
9.ACD
【解析】A.根据同种电荷相互排斥,异种电荷相互吸引,可知云层靠近避雷针时,针尖感应出正电荷,故A正确;
B.据电场线的疏密可知,塔尖的电场强度较大,所以向塔尖端运动的电荷受到的电场力越来越大,故B错误;
C.由于电荷更容易集中到尖端,越靠近避雷针尖端电场强度越大,故C正确;
D.负电荷在电场力的作用下向塔尖端运动,电场力做正功,电势能减小,故D正确.
故选ACD.
10.BC
【解析】AB.当永磁体随转轴转动时,产生转动的磁场,铝盘中会产生感应电流,这时永磁体会对铝盘有力的作用,从而产生一个转动的力矩,由于游丝的反力矩,会使指针稳定指在某一刻度上,故A错误,B正确;
C.刻度盘上的零刻度线应标在刻度盘的中央,故C正确;
D.若去掉游丝和指针,使转轴Ⅱ可以无阻碍地自由转动,永磁体固定在转轴Ⅰ上,铝盘固定在转轴Ⅱ上,由楞次定律知,铝盘不能同永磁体完全同步转动,其转速低于永磁体的转速,故D错误.故选BC.
三、非选择题:本题共5小题,共54分.
11.(共7分)
(1)2 (1分)
(2)18.8(1分) ,944.9 (1分)
(3)g=4π2LT2(1分) 9.72 (2分)
(4)偏小(1分)
【解析】(1)单摆在摆动过程中,摆球位于最高点时,细线弹力最小,根据图乙可知,连续两次细线弹力最小经历时间为半个周期,则有12T=1.0s
解得T=2.0s
(2)10分度游标卡尺的精确值为0.1mm,摆球的直径为d=18mm+8×0.1mm=18.8mm.
该摆摆长为L=18.8 /2 mm+990.6cm=1000.0mm
(3)根据T=2πLg
解得
g=4π2LT2
测得当地重力加速度g的值为
g=4π2LT2=4×3.142×1.00002.02m/s2≈9.86m/s2.
(4)摆线上端悬点未固定好,摆动中出现松动,则L测量值偏小,导致g偏小
12.(共9分)
(1)3.0 0.50 等于 大于(每空1分)
(2)13(1分) 9(2分) (3)mgR0EmgR0+kL(R+r)(2分)
【解析】本题考查闭合电路欧姆定律、胡克定律、串并联等必备知识,理解、推理论证、实验探究等关键能力.(1)由闭合电路欧姆定律E=I(R+r),得1I=1ER+1Er,于是斜率k=1E=13,截距b=1Er=16,得到E=3.0V,r=0.50Ω.若考虑电流表内阻,于是上式变为E=I(R+r+Rg),得1I=1ER+1E(r+Rg).所以,电动势测量值仍等于真实值,内阻测量值大于真实值.(2)当电压表达到满偏时滑动变阻器接入电路电阻R0=27Ω,根据闭合电路欧姆定律可得UR0=ER0+r+R,解得R=13Ω.(3)滑片P滑到滑动变阻器的b端,弹簧的形变量增加了3cm,由平衡条件有kΔx=mg,则该电子秤所能称量的最大质量为m=9kg.(4)根据闭合电路欧姆定律和力的平衡有Umgk×R0L=Emgk×R0L+R+r,解得U=mgR0EmgR0+kL(R+r).
13.(9分)(1)43p0(4分);(2)增加Q(5分)
【解析】(1)由于温度升高,体积不变,气体为等容变化,根据查理定律可得
p0T0=p43T0 (2分)
解得
p=43p0(2分)
(2)根据热力学第一定律有
ΔU=Q+W(1分)
由于气体体积不变,所以
W=0(1分)
所以
ΔU=Q(1分)
14.(11分)
(1)U=1.2×109V(5分);(2)B=4T(3分);
(3)方案一,施加电压明显过高,从安全和技术角度已经无法实现,且电场会改变粒子的能量,因此无法使用;方案二,所需磁感应强度,从安全和技术上看完全可以实现,同时也不会改变粒子的动能.因此方案二更符合实际情况,便于实现.(2分)
【解析】(1)方案一设计一沿AC方向的匀强电场,则质子在该区域内做类平抛运动,有
vy=v0tan 60° (1分)
vy=2ad2(1分)
Eq=ma(1分)
得E=2.4×109V/m(1分)
U=Ed=1.2×109V(1分)
(2)加入垂直ABCD平面向外的磁场,质子在磁场中做匀速圆周运动,设轨道半径为,得qv0B=mv20r(1分)
如图已知两点速度方向,分别做垂线,交点即为圆心.
由几何关系得 (1分)
得B=4T(1分)
(3)方案一,施加电压明显过高,从安全和技术角度已经无法实现,且电场会改变粒子的能量,因此无法使用;方案二,所需磁感应强度,从安全和技术上看完全可以实现,同时也不会改变粒子的动能.因此方案二更符合实际情况,便于实现.(2分)
15.(1)16s(4分),(2)θ=30°(4分),(3)M2M1=2(7分)
【解析】(1)当机器人A先做匀加速直线运动加速至3m/s,然后做匀速直线运动,最后做匀减速直线运动至零时,机器人A从分拣处运行至投递口所需时间最短.做匀加速直线运动阶段根据运动学的公式得,
t1=v0a=1s
s1=12at21=1.5m(1分)
匀减速直线运动阶段根据运动学的公式得,
t2=v0a=1s
s2=12at22=1.5m(1分)
匀速直线阶段根据运动学的公式得,
t3=L-s1-s2v0=14s(1分)
运行总时间:t=t1+t2+t3=16s(1分)
(2)设要使得包裹刚开始下滑,托盘的最小倾角θ,对包裹,受力分析得
N=mgcos θ (1分)
f=mgsin θ(1分)
f=μN(1分)
得托盘的最小倾角θ=30°(1分)
(3)设机器人A制动滑行过程中受到阻力为重力的k倍,制动后的加速度为a,则有
机器人A制动后kM1g=M1a (1分)
机器人A制动后滑行4.5m后停下来,则有0-ν20=-2as1 (1分)
设机器人A被碰后瞬间的速度为,滑行2m后停下来,则有0-ν2A=-2as2 (1分)
联立可得νA=ν0s2s1=2(m/s) (1分)
A、B发生弹性碰撞,A和B组成的系统根据动量守恒定律和能量守恒定律有,
M1v0=M1vB+M2vA(1分)
12M1v20=12M1v2B+12M2v2A(1分)
解方程组得:vA=2M1M1+M2v0
由于νA=2(m/s),ν0=3(m/s)
故得M2M1=2(1分)
责任编辑 李平安
