仿牛鼻鳐机器鱼设计与分析
2024-06-23张曼麦文王炳乾
张曼 麦文 王炳乾
摘要:设计一种采用单电机驱动单侧胸鳍方式的牛鼻鳐机器鱼.根据牛鼻鳐身体结构和运动方式,设计长59.2 cm,宽73.6 cm,高15.6 cm的机器鱼,实现运动控制.进行运动控制分析,验证机器鱼的水平、垂直、转弯和滑翔运动.设计胸鳍鳍条运动仿真实验,验证机器鱼胸鳍鳍条弦向、展向和鳍尖运动规律.结果证明,机器鱼展向运动类似正弦规律且频率相同,弦向运动类似正弦规律且幅度相同,胸鳍鳍尖振幅为49.42°.分析和仿真表明机器鱼胸鳍的展向、弦向振动规律与牛鼻鳐胸鳍振动规律相似,能够实现滑翔功能,为进一步优化机器鱼模型和搭建机器鱼平台并进行水动力试验提供方向.
关键词:仿生鱼; 滑翔; 胸鳍机构; 牛鼻鳐
中图分类号:TP242 文献标志码:A 文章编号:1001-8395(2024)05-0676-06
doi:10.3969/j.issn.1001-8395.2024.05.013
0 引言
水下作业系统一直以来备受世界各国关注.传统的水下航行器具有推力大、速度快和易于控制等优点[1-2],但存在效率低,平均效率在40%~50%[3-4],且难于继续提高的问题[1].螺旋桨还存在被植物缠绕和噪声大等局限性[5].鱼类经过千万年的自然选择和进化,身体机制和游泳模式已趋近完美,多数鱼类游泳效率高于80%,而某些金枪鱼的游泳效率高于90%.有些鱼类还可在转弯半径小于体长10%~30%的情况下实现急转弯[3,6].
鱼类的运动大致可分为身体/尾鳍推进(BCF)模式和中央鳍/对鳍推进(MPF)模式[7].BCF模式鱼类具有狭长身体,依靠身体产生推进波,实现游泳.这类鱼具有较好的速度、加速度和效率[1,8-9].MPF模式的鱼类,在隐蔽性、机动性、稳定性和噪声等方面优势明显[1,8].
MPF模式具有水动力地面效应,具有诸多优势,得到了广泛关注.如文献[5,8,10-14]设计的Robo-ray机器鱼,主要采用人工肌肉或电机驱动胸鳍实现,文献[3,15-16]以蝠鲼为原理设计的RoMan机器鱼,Bianchi等[17]仿牛鼻鳐设计的主动控制机器鱼.Wu等[18]仿蝠鲼设计的胸鳍鳍条驱动控制机器鱼.
本文以牛鼻鳐为原型,针对多鳍条驱动模式存在控制复杂和续航能力差等问题,提出了一种改进模型.采用3D建模技术,在单电机驱动单侧多鳍条情况下,使总电机数量降到3个.通过控制浮力系统和尾鳍,实现仿生鱼的滑翔功能,节省大量能耗,明显增强续航时间.通过仿真分析和实验,验证了设计的可行性.
1 结构设计
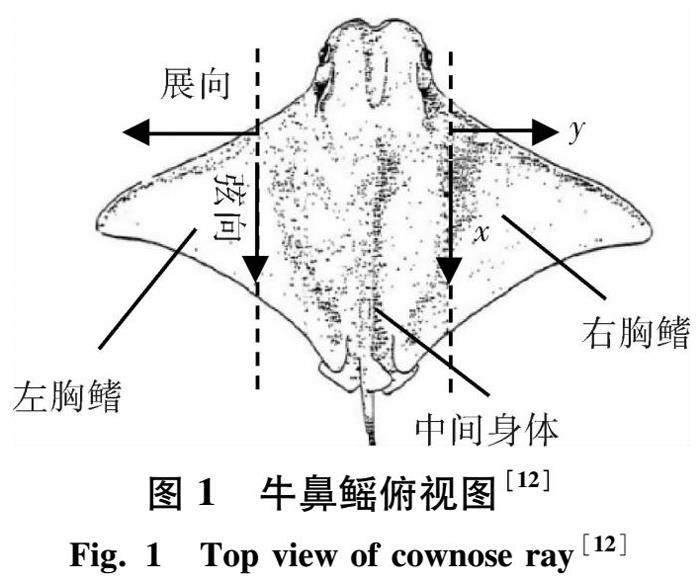
通过对海洋博物馆内多个牛鼻鳐的游泳运动分析,得到牛鼻鳐游泳时身体变形[12,19]、胸鳍轮廓图和翼尖轨迹图[12],如图1~3所示.
研究表明,牛鼻鳐胸鳍的振动频率为0.5~1.2 Hz[12].振动过程中,振动幅度通常是翼展的0.3倍,上冲程运动与下冲程运动相似,方向相反[10,13].这种低振动频率产生低噪声,能降低环境影响.胸鳍的振动方向与游泳方向垂直,振动运动产生推力,这种游泳方式能够提高速度和效率[11,13].此外,在长距离迁徙过程中,牛鼻鳐采用滑翔,能耗低.
1.1 总体结构 仿牛鼻鳐机器鱼模型包括了6个部分:头部、中部、后部、胸鳍、尾鳍和皮肤,如图4和5.头部有摄像头、红外传感器、姿态传感器、压力传感器、微处理器模块、通信模块、驱动电机、电池及电池管理模块等,沿鱼体对称排布.后部包含浮力系统.胸鳍蒙皮采用硅胶,皮肤采用弹性为1.5~2倍的透光尼龙布.头部和中部用挡板、防水橡胶密封圈及防水密封胶进行密封处理;后部和中部也采用挡板、防水橡胶密封圈及防水密封胶进行密封处理.驱动电机输出轴安装有VA型氟橡胶水封和双面胶盖密封不锈钢轴承,以解决旋转轴密封和动力输出的问题.
1.2 胸鳍结构 胸鳍由左胸鳍和右胸鳍两部分构成,它们结构相同,沿鱼体对称排布.此处,以左胸鳍为例,加以说明.根据鳍边缘轮廓值,设计左鳍条长度及鳍条位置关系.左胸鳍由4个鳍条组成,包括第一鳍条、第二鳍条、第三鳍条和第四鳍条,如图6.其中,第一、第二、第三鳍条平面连杆机构简图如图7所示,第四鳍条与第一鳍条结构相同.左胸鳍由单个电机驱动,通过鳍条间驱动轴安装角度差,实现鳍条间的相位差.鳍条平面连杆机构将驱动电机的旋转运动转变为连杆往复的拍打运动.由此,仿生鱼可以在其鳍条皮肤表面产生正弦推进波,在展向上产生与牛鼻鳐类似的拍打运动.
牛鼻鳐胸鳍横截面在展向上运动频率相同,在弦向上运动幅度相同.第一鳍条曲柄OD与驱动电机连接,驱动电机以角速度ω0匀速转动.以O为原点,第一鳍条平面机构投影到两坐标系的方程组如下:
lEPsin β+lEDsin θ=LOPsin γ+lODsin α,lEPcos β=lEDcos θ,LOPcos γ=lODcos α,(1)
其中,lOD为曲柄OD长,lED为杆ED长,LOP为机架OP长,lEP为杆EP长,α、β、θ、γ分别为OD、EP、ED、OP与x坐标的夹角.通过(1)式求得β和θ,故第一鳍条点A的位置方程如下:
xA=LOPcos γ+lPAcos β,yA=LOPsin γ+lPAsin β,(2)
其中,lPA为杆EP的直线延长杆长度.合理设置位置和杆长参数,实现点A类似正弦规律运动.
根据第一鳍条,设计第二鳍条.第二鳍条平面机构投影到两坐标系的方程组如下:
lPGsin β=lGFsin δ,lPF=lPGcosβ-lGFcos δ,(3)
其中,lPG为杆PG长,lGF为杆GF长,lPF为机架PF长,β和δ分别为PG、GF与x坐标的夹角.通过(3)式求得lGF、δ,故第二鳍条点B的位置方程如下:
xB=LOPcos γ+lPGcos β+lBGcos δ,yB=LOPsin γ+lPGsin β+lBGsin δ,(4)
其中,lBG为杆GF的反向延长杆长度.合理设置位置和杆长参数,实现点B类似正弦规律运动.
根据第二鳍条,设计第三鳍条.第三鳍条平面机构投影到两坐标系的方程组如下:
lHKsin δ=lJKsin ε+lHJsin β,lHKcos δ=lJKcos ε+lHJcos β,(5)
其中,lHK为杆HK长,lJK为杆JK长,lHJ为杆HJ长,ε为JK与x坐标的夹角.通过(5)式求得lJK、ε,故点C在第三鳍条上的位置方程如下:
xC=LOPcosγ+lPHcos β+ lKHcos δ+lKCcos ε,yC=LOPsin γ+lPHsin β+ lKHsin δ+lKCsin ε,(6)
其中,lKC为杆JK的直线延长杆长度.合理设置位置和杆长参数,实现点C类似正弦规律运动.
1.3 浮力系统结构
针对续航问题,设计一种浮力系统,如图8.在尾鳍的辅助下,实现滑翔功能.
该浮力系统主要包括:电磁阀、储水器固定架、储水器、水泵和连接软管.储水器由弹性橡胶材料制成,解决不可变形储水器蓄水容量变化与内部空气压力变化引发的问题.电磁阀和水泵协同控制储水器液位,调整浮力.
2 仿真分析
2.1 运动仿真 鳍条弦向运动规律验证.控制鳍条驱动轴匀速运动,取第一鳍条、第二鳍条、第三鳍条和第四鳍条的第一个节点,分别为点A、G、H、M,绘出垂直位移曲线,如图9.相邻鳍条间相位差90°,鳍条产生近似正弦波运动规律,由仿真结果可知,仿生鱼胸鳍的弦向运动规律与牛鼻鳐胸鳍的一致.
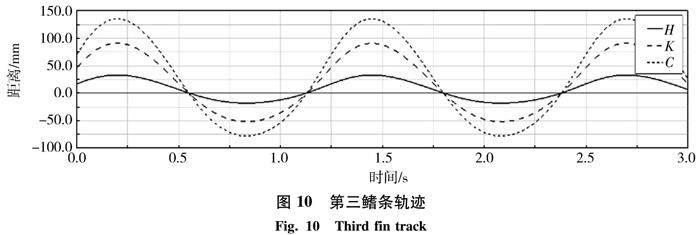
鳍条运动频率和运动幅度验证.控制鳍条驱动轴匀速运动,取第三鳍条的3个节点,绘制垂直位移曲线,如图10.点H是第三鳍条根部点,点K是第三鳍条中部点,点C是第三鳍条尖部点.由仿真结果可知,仿生鱼胸鳍横切面在展向方向上的运动频率是相同的,运动幅度从胸鳍根部到胸鳍远端逐渐增大,符合鳍条设计要求和牛鼻鳐胸鳍的运动规律.
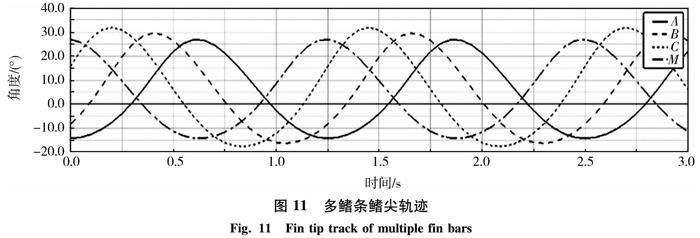
图11呈现了仿生鱼模型不同鳍条尖部振动角度变化规律.鳍条尖部最大振动幅度不超过49.42°,振动幅度小,接近牛鼻鳐胸鳍真实振动幅度.
2.2 运动分析 左胸鳍驱动电机以一定大小和方向的角速度转动,产生推力FL.右胸鳍驱动电机以相同大小,相反方向的角速度转动,产生推力FR.当FL=FR,仿牛鼻鳐机器鱼向前运动,如图12(a).左、右胸鳍驱动电机转动方向分别与前进方向相反,则机器鱼后退.
仿牛鼻鳐机器鱼左、右胸鳍的振动频率不同,实现转弯.当左胸鳍驱动电机转速更快,则FL>FR,仿牛鼻鳐机器鱼右转,如图12(b).反之左转,如图12(c).左、右胸鳍驱动电机转速相同,则FL=-FR,仿牛鼻鳐机器鱼原地转弯,如图12(d).
控制浮力系统,实现垂直运动.处理器根据压力传感器检测的压力值,通过水泵控制储水量,进而改变浮力,实现系统闭环控制.
仿牛鼻鳐机器鱼在浮力系统和尾鳍协同工作下,实现滑翔运动,如图13.调整尾鳍,控制鱼头向下,并使浮力B小于重力G,其合力F可分解为Ft和Fn.在水的影响下,仿牛鼻鳐机器鱼还受到阻力D和升力L.当仿牛鼻鳐机器鱼速度V较小时,Ft>D,仿牛鼻鳐机器鱼加速运动.随着速度增大,阻力[18]D增大,直到Ft=D,仿牛鼻鳐机器鱼匀速运动,实现滑翔下潜.滑翔上浮控制与之相反.综上,实现滑翔功能.
3 机器鱼样机
通过3D打印技术,制作完成机器鱼样机,如图14所示.
该机器鱼高15.6 cm,宽73.6 cm,长59.2 cm,重量约为3 kg.
4 结论
1) 分析牛鼻鳐身体结构、胸鳍轮廓图和翼尖轨迹图,设计仿生牛鼻鳐机器鱼的总体结构、胸鳍鳍条长度及分布位置.
2) 采用单个驱动电机驱动单个胸鳍,使胸鳍驱动电机数量减少,降低控制难度;在尾鳍辅助下,通过浮力系统调节仿生鱼浮力大小,实现滑翔功能.
3) 通过仿生鱼的运动控制分析和胸鳍运动仿真,验证仿牛鼻鳐机器鱼模型的可行性.其中,运动控制分析包括前进运动、后退运动、垂直运动、转弯运动和滑翔;对胸鳍运动的仿真包括展向运动仿真和弦向运动仿真.
参考文献
[1] HE J J, CAO Y, HUANG Q G, et al. A new type of bionic Manta ray robot[C]//Global Oceans 2020: Singapore-U.S. Gulf Coast. Biloxi: IEEE,2021:1-6.
[2] LI G Y, DENG Y X, OSEN O L, et al. A bio-inspired swimming robot for marine aquaculture applications: from concept-design to simulation[C]//OCEANS 2016. Shanghai: IEEE,2016:1-7.
[3] ZHOU C L, LOW K H. Better endurance and load capacity: an improved design of Manta ray robot (RoMan-II)[J]. Journal of Bionic Engineering,2010,7(4):S137-S144.
[4] 喻俊志,吴正兴. 自然启迪技术灵感,仿生提升机动性能:解读《高机动仿生机器鱼设计与控制技术》[J]. 中国机械工程,2019,30(4):498-503.
[5] CAI Y R, BI S S, LI G Y, et al. From natural complexity to biomimetic simplification: the realization of bionic fish inspired by the cownose Ray[J]. IEEE Robotics Automation Magazine,2019,26(3):27-38.
[6] ZHOU C L, LOW K H. Design and locomotion control of a biomimetic underwater vehicle with fin propulsion[J]. IEEE/ASME Transactions on Mechatronics,2012,17(1):25-35.
[7] SFAKIOTAKIS M, LANE D M, DAVIES J B C. Review of fish swimming modes for aquatic locomotion[J]. IEEE Journal of Oceanic Engineering,1999,24(2):237-252.
[8] NIU C M, ZHANG L G, BI S S, et al. Development and depth control of a robotic fish mimicking cownose ray[C]//2012 IEEE International Conference on Robotics and Biomimetics. Guangzhou: IEEE,2013:814-818.
[9] MENG Y, WU Z X, DONG H J, et al. Toward a novel robotic manta with unique pectoral fins[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems,2022,52(3):1663-1673.
[10] CAI Y R, BI S S, ZHENG L C. Design and experiments of a robotic fish imitating cow-nosed ray[J]. Journal of Bionic Engineering,2010,7(2):120-126.
[11] CAI Y R, BI S S, ZHANG L G, et al. Design of a robotic fish propelled by oscillating flexible pectoral foils[C]//2009 IEEE/RSJ International Conference on Intelligent Robots and Systems. Louis: IEEE,2009:2138-2142.
[12] CAI Y R, BI S S, ZHANG L G. Design and implication of a bionic pectoral fin imitating cow-nosed ray[C]//2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. Taipei: IEEE,2010:3525-3529.
[13] MA H W, CAI Y R, WANG Y L, et al. A biomimetic cownose ray robot fish with oscillating and chordwise twisting flexible pectoral fins[J]. Industrial Robot: An International Journal,2015,42(3):214-221.
[14] ZHANG Y X, WANG S P, WANG X J, et al. Design and control of bionic manta ray robot with flexible pectoral fin[C]//2018 IEEE 14th International Conference on Control and Automation. Anchorage: IEEE,2018:1034-1039.
[15] LOW K H, ZHOU C L, SEET G, et al. Improvement and testing of a robotic manta ray (RoMan-III)[C]//2011 IEEE International Conference on Robotics and Biomimetics. Karon Beach: IEEE,2012:1730-1735.
[16] CHI W, LOW H K. Review and fin structure design for robotic Manta ray (RoMan IV)[J]. Journal of Robotics and Mechatronics,2012,24(4):620-628.
[17] BIANCHI G, CINQUEMANI S, RESTA F. Bio-inspired design of an underwater robot exploiting fin undulation propulsion[J]. Applied Sciences,2021,11(6):2556.
[18] WU J N, WU G, GUO Y, et al. Overall design and flutter motion analysis of a semi-active manta ray robot[C]//OCEANS 2019 MTS/IEEE SEATTLE. Seattle: IEEE,2020:1-6.
[19] ROSENBERGER L J. Pectoral fin locomotion in batoid fishes: undulation versus oscillation[J]. Journal of Experimental Biology,2001,204(2):379-394.
Design and Analysis of A Robotic Cownose Ray
ZHANG Man1, MAI Wen1, WANG Bingqian2
(1. College of Physics and Electronic Engineering, Sichuan Normal University, Chengdu 610101, Sichuan;2. Huaneng Dali Hydropower Co. Ltd., Dali 671000, Yunnan)
Abstract:A robotic cownose ray with a single motor driving a unilateral pectoral fin was designed. According to the body structure and movement mode of the bull nose ray, a robotic fish with a length of 59.2 cm, a width of 73.6 cm, and a height of 15.6 cm was designed to achieve motion control. The motion control analysis was carried out to verify the horizontal, vertical, turning, and gliding motion functions of the robotic fish. The simulation experiment for the bar motion of the pectoral fin was designed to verify the pectoral fin bar chord, span, and tip motion rules of robotic fish. The results show that the spanwise motion of robotic fish is similar to the sine law with the same frequency, the chordwise motion is similar to the sine law with the same amplitude, and the maximum amplitude of the fin tip is 49.42°. The analysis and simulation results show that the oscillations of the pectoral fins of the robotic fish are similar to those of the ray, which can realize the gliding function, and provide direction for further optimization of the robotic fish model, construction of the robotic fish platform and the hydrodynamic test.
Keywords:bionic fish; gliding; pectoral fins mechanism; cownose ray
(编辑 郑月蓉)
基金项目:国家自然科学基金(61901289)
*通信作者简介:麦 文(1974—),男,副教授,主要从事机器人和信号处理的研究,E-mail:329050589@qq.com
引用格式:张曼,麦文,王炳乾. 仿牛鼻鳐机器鱼设计与分析[J]. 四川师范大学学报(自然科学版),2024,47(5):676-681.
