混合驱动水下滑翔器滑翔效率及优化研究
2018-08-30肖冬林李迎华赵桥生
肖冬林,张 华,李迎华,赵桥生
(中国船舶科学研究中心,江苏 无锡 214082)
0 引 言
水下滑翔器是一种通过剩余浮力做功提供前进动力,通过内部滑块移动进行姿态调节从而实现垂直面内锯齿形运动的新型无人水下航行器。它有着工作时间长、工作范围广、能耗低、噪音低等诸多优点,在海洋环境监测、水下探测、通信等领域有着重要的应用[1]。同时,常规浮力驱动水下滑翔器也有着航速低、机动性差的缺点,不利于障碍物规避及在狭窄、浅水及强海流水域航行。混合驱动水下滑翔器结合了AUV和水下滑翔器的优点:在动力推进模式下,有着较好的机动性;在滑翔模式下,有着较高的续航能力,能够执行更为复杂的水下探测作业任务。
续航力是水下滑翔器的重要性能指标,为了提高水下滑翔器的航程,需要降低能耗,提高滑翔效率。滑翔器的滑翔效率与水动力外形、滑翔姿态、剩余浮力大小、搭载仪器功耗等诸多因素有关。文献[2]研究了不同类型滑翔器运动状态、剩余浮力大小等对滑翔器滑翔效率的影响。文献[3]从做功的角度研究了滑翔姿态对滑翔器滑翔效率的影响;文献[4]分析了机翼展弦比、后掠角对升阻比的影响;文献[5]研究了螺旋桨对混合驱动水下滑翔器阻力及航程的影响。以上文献在分析滑翔效率时均没有综合考虑水平速度,而水平速度是滑翔器的重要性能指标之一。
本文从平面定常运动基本方程出发,给出了单位重量滑翔器为获得单位水平速度所需能耗的数学表达式,作为一种基于运输经济性的滑翔效率评价指标。本文分析了滑翔姿态对水下滑翔器滑翔效率的影响及螺旋桨转动模式对混合驱动水下滑翔器滑翔效率的影响。分析所需的各种驱动情况下滑翔器的流体动力系数由CFD方法获得。
1 水下滑翔器效率评价指标
1.1 受力分析
对滑翔器垂直面定常滑翔状态进行受力分析,如图1所示,其中D表示阻力,L表示升力,M表示滑翔器受到的俯仰力矩水动力,α表示攻角,ξ表示滑翔角(速度与水平方向的夹角),m0g表示剩余浮力,坐标原点O位于均衡态滑翔器的浮心。

图1 水下滑翔器受力分析(左:下潜,右:上浮)Fig.1 Analysis of the force of underwater glider(Left:down,Right:up)
受力平衡需满足:

式中:l表示剩余浮力作用中心到坐标原点O的距离,ZG表示重心垂向坐标,m表示滑翔器质量。滑翔器水动力系数无论滑翔模式或动力推进模式均可以按下式进行简化[7]:

1.2 滑翔效率指标
从能耗的角度研究滑翔器的续航力,本文采用的指标为单位重量水下滑翔器移动单位水平距离所需能耗:

式中:E表示能耗系数,W表示重量为mg的滑翔器水平移动距离为s时的总能耗,Vx表示平均水平速度,P表示平均功率,包括浮力调节系统平均功率P0(P0=m0gVz/η0=DV/η0,m0g表示平均剩余浮力大小,Vz表示平均垂直速度大小,η0表示剩余浮力调节系统机械效率),姿态调节系统、传感器等搭载仪器及通信系统平均功率P1,对于混合驱动滑翔器,还包括推进系统功率P2(P2=2πnQ/η2,n、Q分别表示螺旋桨转速、扭矩,η2表示螺旋桨电机效率)。显然,能耗系数E越小,水下滑翔器滑翔效率越高。
对于螺旋桨不做功(或不带桨)和螺旋桨做功的情况,将剩余浮力做功及螺旋桨做功展开,则(7)式可分别改写为如下形式:

式中:DP表示螺旋桨直径,KQ表示螺旋桨扭矩系数,J表示进速系数。
对于特定水下滑翔器,总长L0、η0、η2和P1均可认为是定值。当螺旋桨不做功时,(8)式中阻力系数CD及滑翔角ξ可认为仅与滑翔姿态(攻角α)有关;当螺旋桨做功时,(9)式中CD及ξ与攻角α及进速系数J有关,KQ、ω主要与进速系数J有关。因而当螺旋桨不做功时,能耗系数与水平滑翔速度Vx及滑翔姿态(攻角α)有关;当螺旋桨做功时,能耗系数还与螺旋桨进速系数有关。
(8)、(9)式均可改写成如下形式:

式中:括号中第一项表示滑翔器克服水动力阻力的功耗,移动单位水平距离所需能耗与速度的平方成正比;第二项表示滑翔器搭载仪器设备功耗,移动单位水平距离所需能耗与水平速度成反比。按物理意义,显然有 f( α, J )在定义域内有界,并恒大于零。故 f( α, J)必存在极小值。而对任何 (α, J),因f( α, J )恒大于零,当 P1>0,f1(α, J,Vx)必有极小值。
若 f( α, J )在定义域内存在最小值,对应的最优攻角、最优进速系数分别记为 αP、JP,再对(10)式求导,可得到使得E取得极小值最优水平速度Vxp为:

由于 f( α, J )主要与滑翔器水动力性能有关,本文主要研究使f( α, J)取得极小值的最优滑翔姿态(最优攻角αP)及螺旋桨最优进速系数JP。
得到了最优滑翔姿态及最优水平速度,并获取最优滑翔状态下的水动力,根据受力平衡方程(1)~(3)可得到水下滑翔器的最优剩余浮力m0g及相应的剩余浮力力臂l。
当 P1=0 时,Vx在 f( α, J )最小时,可以在方程(1)~(3)范围内任意选择设计值,此时的能耗系数一定是对应该Vx最小。
2 浮力驱动水下滑翔器滑翔效率分析
浮力驱动水下滑翔器通过剩余浮力做功克服滑翔过程中的阻力,保持垂直面内锯齿形的运动。滑翔器的运动状态如速度V、攻角α、滑翔角β等对滑翔效率有着重要的影响,此节中将采用所建立的效率评价指标来分析这些变量对滑翔器滑翔效率的影响,并对滑翔器剩余浮力大小及剩余浮力力臂进行优化设计。
2.1 计算验证
研究的水下滑翔器模型主体长度2.15 m、直径0.3 m,水平翼展长1.2 m、后掠角30°。采用CFD方法计算滑翔器的水动力,网格划分如图2所示。风速V=16 m/s下,fluent软件计算的垂向力系数与风洞试验数据对比如图3所示。
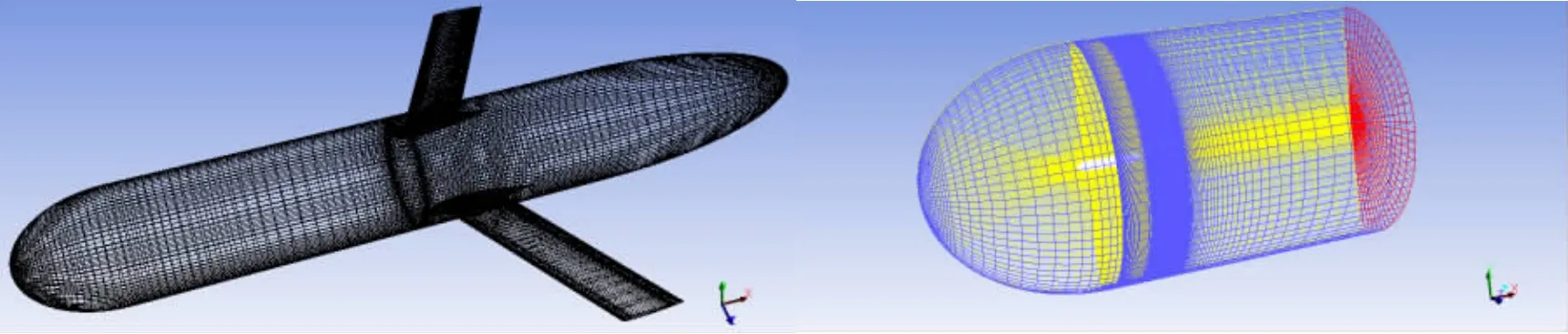
图2 网格划分(左:滑翔器表面网格,右:计算域网格)Fig.2 Meshing(Left:mesh of the glider surface,Right:mesh of computation domain)
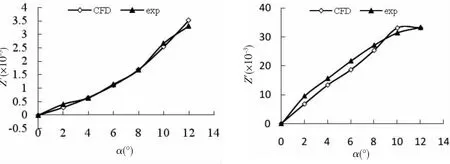
图3 CFD计算结果与试验结果比较(左:主艇体,右:带附体)Fig.3 Comparison of CFD simulation and experiment result(Left:hull,Right :glider with wings)
主艇体垂向力系数计算结果与风洞试验结果攻角2°以上平均相对误差为3.32%,最大误差6.34%。带翼滑翔器垂向力系数与风洞试验结果攻角2°以上平均相对误差为8.3%,最大误差为14.8%。带翼滑翔器计算误差略大,主要是由于计算模型没有考虑尾稳定翼、天线等附体。整体上计算误差在可接受范围内,故可用于本文效率评价。
2.2 变攻角、变速度滑翔效率分析
固定来流速度V,改变攻角α,数值模拟获得滑翔器在不同工况下的水动力系数、升阻比λ如图4所示。

图4 水动力随攻角变化曲线Fig.4 Hydrodynamic-attack angle curves
由图4可知,水下滑翔器的阻力系数CD、升力系数CL及升阻比λ(或滑翔角)主要与攻角α有关,随速度变化不大;在小攻角范围内,CD、CL基本上随α单调递增,本滑翔器在攻角约为6°时,升阻比达到最大值。
再根据(4)~(6)式,采用最小二乘法回归得到各水动力系数如表1所示。

表1 水动力系数计算结果Tab.1 Hydrodynamic force coefficient of underwater glider
由于计算对象上下完全对称,故KL0、KM0大小为0。假定水下滑翔器剩余浮力调节系统机械效率η0=40%,结合(1)~(6)式,可得到图 5 所示的 f(α)-α 曲线。
根据计算的结果,得到f(α)取得最小值的攻角αP≈2.8°。
假定水下滑翔器搭载仪器功率P1=3 W,由(7)式可得到最优水平速度Vxp≈0.42 m/s。
通过受力平衡方程(1)~(3),可得到最优滑翔状态下的剩余浮力m0g≈4 N,剩余浮力力臂l≈0.588 m。
作为比较,给出相同剩余浮力(m0g≈4 N)下升阻比λ最大时的滑翔姿态、滑翔速度及能耗系数,如表2所示。
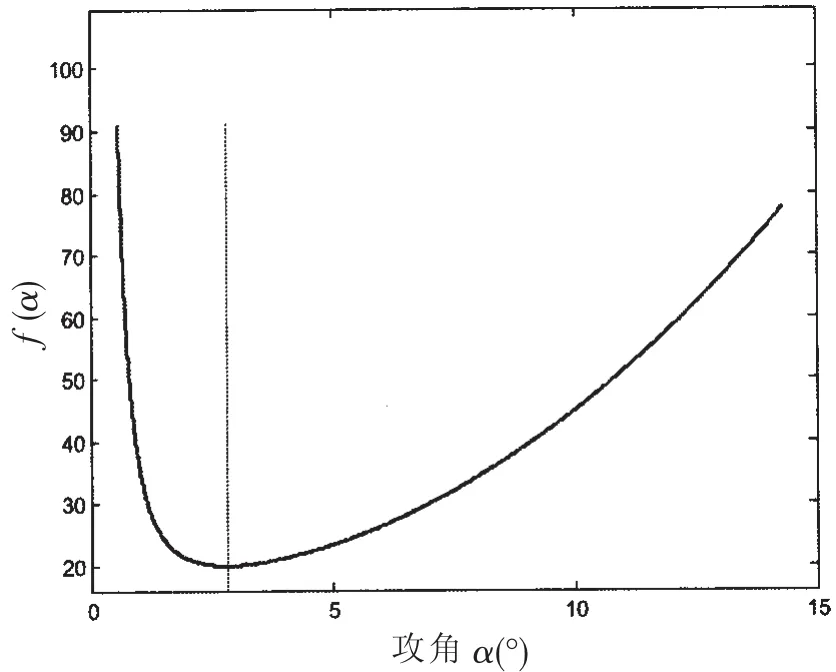
图 5 f(α)-α 曲线Fig.5 f(α)-α attack angle curves

表2 不同滑翔姿态下的滑翔效率比较Tab.2 Comparison of gliding efficiency in different gliding mode
计算结果表明最大升阻比并不代表滑翔效率最高,相同剩余浮力条件下,滑翔器以本文得到的最优滑翔姿态滑翔较最大升阻比姿态能耗系数可降低20%,且水平滑翔速度较高。
3 混合驱动水下滑翔器效率分析
混合驱动水下滑翔器有滑翔模式及动力推进模式两种工作模式。在滑翔模式下,滑翔器主要通过剩余浮力做功提供前进动力,进行垂直面锯齿形运动;而在动力推进模式下,推进系统提供动力,完成水平运动或其它机动。混合驱动滑翔器大多数时间工作在滑翔模式下,螺旋桨的存在会增大阻力、增大滑翔器功耗,降低航程。
在滑翔模式下,混合驱动滑翔器的螺旋桨可以固定不动,也可以在水流的作用下随动转,还可以做功主动低速转。对于斜流下螺旋桨非定常水动力的计算,fluent提供了滑移网格技术和动网格技术,其中滑移网格技术比较简便实用。本文采用滑移网格技术计算艇后螺旋桨的水动力。应用所建立的滑翔效率指标,评价了螺旋桨对滑翔器滑翔效率的影响及螺旋桨转动方式对滑翔效率的影响。
3.1 计算验证
计算对象为前述带翼滑翔器及尾部直径0.125 m的三叶桨构成,网格划分如图6所示。计算域分为包含螺旋桨的旋转区域及静止区域两部分,其中,静止区域采用全结构化网格,而旋转区域采用非结构化网格,网格总数为200万。

图6 混合驱动滑翔器网格划分(左:艇体表面网格,右:尾部附近网格)Fig.6 Mesh of HUG(Left:mesh of the surface,Right:mesh near the propeller)
由于目前缺乏带桨滑翔器的试验数据,本文仅对螺旋桨敞水计算进行验证。选用的螺旋桨型号为P4119三叶桨,盘面比为0.6,直径0.25 m。计算域为全流域,计算模型选择滑移网格模型。CFD计算结果与图谱的比较如图7所示。

图7 敞水桨CFD计算与试验结果比较Fig.7 Comparison of open-water characteristics of propeller by CFD and experiment
由上图可知,推力系数KT计算值与试验值平均误差为1.96%,最大误差为4.80%;扭矩系数KQ计算值与试验值平均误差2.84%,最大误差5.78%;敞水效率η计算值与试验值平均误差2.32%,最大误差6.68%。计算结果表明,所采用的数值方法是可行的。
数值计算中,固定来流速度和攻角,改变螺旋桨的转速。不同转速下,螺旋桨提供的推力不同,导致滑翔器的总阻力和总升力也不同。根据力的平衡关系(1)-(3),可以得到每个转速下的滑翔角或者升阻比及平衡所需的剩余浮力大小。
3.2 螺旋桨不做功时的滑翔效率分析
当螺旋桨不转或在水流的作用下随动转动时,螺旋桨不输出功率。不考虑螺旋桨电机阻尼,随动转时螺旋桨阻尼为零。不同攻角下,不带桨、带桨桨不转及随动转CD、λ及f( α, )J比较如表3所示。
由计算的结果可知不同攻角下螺旋桨不转时较不带桨滑翔器阻力约增大了14%,升阻比约降低了 10%, f( α, )J增大18%~21%;螺旋桨在水流的作用下随动转,较桨不转滑翔器阻力减小8%~9%,f ( α, )
J减小10%~16%。这说明在滑翔状态下(仅剩余浮力做功),混合驱动滑翔器让桨随水转动比桨锁住要好得多。

表3 随动转、桨不转及不带桨变攻角计算结果比较Tab.3 Gliding efficiency analysis comparison between propeller driven by water,propeller fixed and without propeller
3.3 主动低速转动时的滑翔效率分析
固定来流速度及攻角大小,逐渐增大螺旋桨转速,得到不同转速下滑翔器的总阻力、总升力及螺旋桨的扭矩。据此可以得到滑翔器在不同进速下的升阻比λ及及f( α, )J曲线。计算结果如图8所示。
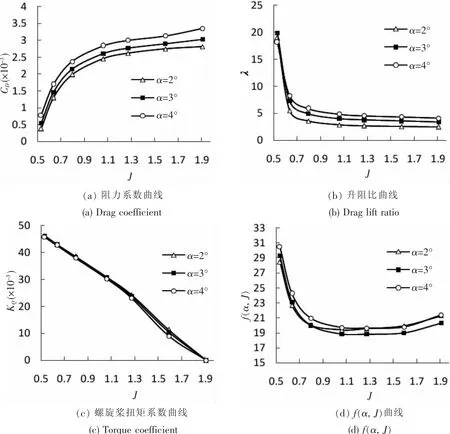
图8 变进速系数下的滑翔效率分析Fig.8 Gliding efficiency analysis of HUG with different advance coefficient
计算结果表明:对于攻角α=2°、3°和4°三种工况,虽然桨的伴流分数会略有不同,但其桨的扭矩特性基本不变(图8(c));无论是阻力系数,还是升阻比,在所有J的计算范围内,攻角α=3°处于居中地位(图 8(a),8(b));当 J>0.8 开始,α=3°工况的 f( α, )J在三者之间始终处于最低位,并在J≈1.27左右达到最小值,这也是三种工况下的最小值。
同时,J≈1.27 处的 f( α, )J也明显比螺旋桨随动转工况(螺旋桨扭矩系数为0,J≈1.9)小。因而驱动电机工作,桨在J=1.27,攻角3°时,滑翔效率最佳,且优于定桨或随动桨。
4 结 论
本文从平面定常动力学方程出发,提出了水下滑翔器效率的评价指标,即单位滑翔器重量、单位水平速度所需能耗。
(1)基于此指标,给出了能耗系数的数学表达式,求其最小化的最优途径。为工程产品的设计,提出了有效工具。最优解对工程设计有较大参考价值。
(2)对于特定的浮力式水下滑翔器,按文中方法,得到其滑翔效率最高的攻角为2.8°,水平速度为0.42 m/s,剩余浮力 4 N。
(3)对于具体的混合驱动水下滑翔器,本文方法得到:若驱动电机不工作,让桨随水转动比锁住滑翔效率高,而桨的存在总是增加能耗,降低效率;若驱动电机工作,则桨在J=1.27,攻角3°时,滑翔效率最佳,且优于定桨或随动桨。