永磁同步电机模糊滑模无位置传感器控制
2024-06-06禹聪康尔良




摘"要:
针对滑模量在滑模面切换以及速度非线性变化而致使的系统抖振问题,提出一种超旋转滑模模糊观测器。滑模观测器(SMO)存在的高频抖振会对电机控制系统产生很大的影响,导致电机产生转速波动和稳态误差。为了削弱SMO的抖振问题,首先对滑模动态变量的趋近速度动态变化导致的抖振问题,通过引入模糊逻辑理论使得系统状态量趋动速度智能化,设置模糊规则以达到智能动态化速度,以系统动态变量趋向切换面的距离与状态量动态趋向速度为规则因子,动态智能化趋向速度;其次对系统变换函数导致的系统抖振,进一步采用连续函数F(s)代替不连续的sgn(s)符号函数。该方案有效削弱了系统的抖振问题,相较于SMO控制提高了系统的稳定性。
关键词:永磁同步电机;无位置传感器控制;滑模观测器;模糊控制;高频抖振;滑模控制
DOI:10.15938/j.emc.2024.01.009
中图分类号:TM341
文献标志码:A
文章编号:1007-449X(2024)01-0087-08
Fuzzy sliding mode position sensorless control of permanent magnet synchronous motor
YU Cong1,2,"KANG Erliang1,2
(1.School of Electrical and Electronic Engineering, Harbin University of Science and Technology, Harbin 150080, China; 2.Engineering Technology Innovation Center of DirectDrive System in Colleges and Universities in Heilongjiang, Harbin 150080, China)
Abstract:
A super rotating sliding mode fuzzy observer was proposed to address the system chattering problem caused by the switching of sliding mode variables on the sliding mode surface and nonlinear changes in velocity. The highfrequency chattering in sliding mode observer (SMO) can have a significant impact on the motor control system, leading to speed fluctuations and steadystate errors in the motor. In order to weaken the chattering problem of SMO, aiming at the chattering problem caused by dynamic changes in the approaching velocity of sliding mode dynamic variables, by introducing fuzzy logic theory, the trend speed of system state variables was intelligentized. Fuzzy rules were set to achieve intelligent dynamic speed, with the distance between the system dynamic variables towards the switching surface and the dynamic trend speed of the state variables as the rule factors, and dynamic intelligent trend speed was achieved; Secondly, in response to the system chattering caused by the system switching function, a continuous function F(s) was further adopted to replace the discontinuous sgn(s) symbol function. This scheme effectively weakens the chattering problem of the system and improves the stability of the system compared with SMO control.
Keywords:permanent magnet synchronous motor; sensorless control; sliding mode observer; fuzzy control; high frequency chattering; sliding mode control
0"引"言
永磁同步电机(permanent magnet synchronous motor,PMSM)由于其体积小、效率高等优点在工业领域得到了广泛的应用[1]。PMSM控制需要传感器、编码器等机械器件来确定转子的位置,但是目前常用的增量式编码器和霍尔传感器使得PMSM的成本增加,体积增大,同时会使得系统的稳定性降低,因此对于无传感控制的研究得到了广泛的关注[2]。
无传感控制技术是通过检测电机绕组中的电信号来提取转子的位置信息,如定子电压和电流,通过控制算法实现电机转子速度和位置估算,常用的无传感控制方法可以分为两类,包括基于显著性跟踪的高频注入法[3]和基于机器模型的反电动势方法[4]。目前应用算法可投入广泛应用的有滑模观测器法[5-7]、模型参考自适应控制算法[8]、扩展卡尔曼滤波算法[9]等。
滑模观测器(sliding mode observer,SMO)作为一种强鲁棒性的非线性观测器,以其设定电流与反馈电流为误差控制元素来设计观测器,以此可以得出PMSM转子数据以及反电动势大致数值等数据。作为一种典型的反电动势方法,该方式有不敏感于电机参数的优势。然而,滑模控制的抖振问题会降低观测器的估算精确度,导致电机产生转速波动。在实际应用中为了减小系统的抖振问题,通常会以开关函数和状态量趋近速度为出发点进行优化,通过采用平滑函数来代替切换函数[10-12]来削弱系统抖振。文献[13]设计了一种连续幂次函数Fal函数来代替传统的符号函数,有效地减小了抖振问题。同时有些人通过对状态量趋近速度进行控制[14-15],文献[16]采用模糊控制原理对滑模切换增益进行智能调节,从而控制状态量的趋近速度,该方式有效削弱了系统的抖振问题。
本文采用表贴式永磁同步电机作为系统控制对象,通过分析滑模观测器抖振问题,并究其产生的原因进行研究,提出一种超螺旋滑模观测器(fuzzy super twisting silding mode observer,FSTSMO)。首先,采用F(s)函数代替传统的sgn(s)开关函数。其次,对滑模控制的滑模切换增益采用模糊控制方式,使其随着与滑模面距离的变化而变化。采取以上方式以期能够削弱系统的抖振问题。
1"传统滑模观测器
PMSM的两相旋转电压方程为
由式(8)可知,估计得到的反电动势值有高频的切换信号,在转子位置估算时采用反正切函数代入运算会产生抖振现象。
2"超螺旋滑模观测器
对于一个动态系统中的控制器来说,通过设置控制器输入,并通过数据反馈调节使得系统控制状态量在有限的时间内收敛到0。本节提出一个动态观测器,该观测器采用超螺旋控制(supertwisting control,STC)算法,根据式(4)可得
由Lyapunov定理可知系统满足ss·lt;0,系统渐进稳定,即系统状态量具有较短时间稳定优势。
3"模糊控制器
为了削弱滑模控制存在的抖振问题,将模糊控制理论引入滑模控制中,采用滑模面作为模糊控制的输入,模糊逻辑设计时对于被控对象的模型并无特别要求,但对专家经验非常依赖,其控制原理是将专家经验融入控制系统来设计模糊规则,随着状态量与滑模面距离的变化对滑模增益进行有效估计。
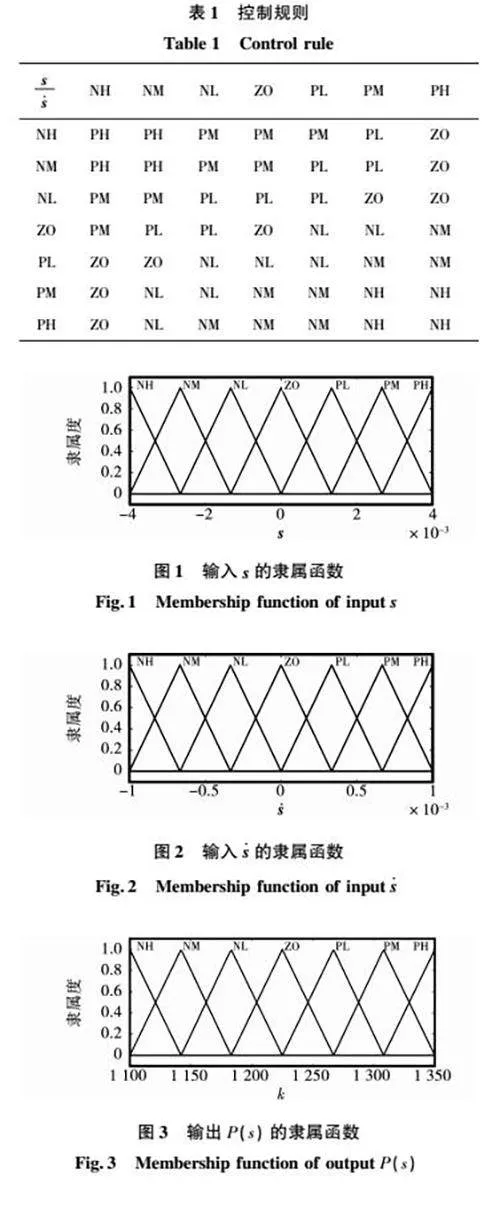
定义模糊控制输入量的模糊语言为:负高(NH)、负中(NM)、负低(NL)、零(ZO)、正低(PL)、正中(PM)、正高(PH)。定义模糊输出的语言为:负高(NH)、负中(NM)、负低(NL)、零(ZO)、正低(PL)、正中(PM)、正高(PH),设计模糊控制规则表如表1所示。由表可知,模糊逻辑理论设计为7个模糊子集并对应7个数据输出,模糊逻辑采用Mamdani为其核心算法以及采用重心反模糊化得出可识别输出量。其控制逻辑如图1~图3所示。
设计控制规则,使得STSMO系统切换增益随着状态量与切换面的距离自整定。系统状态量距离滑模切换面较远时,滑模增益值较大,同时状态量趋近速度很快;当系统状态量与滑模切换面较近时,滑模增益值较小,状态量趋近速度较小,从而削弱系统的抖振。
4"仿真和实验验证
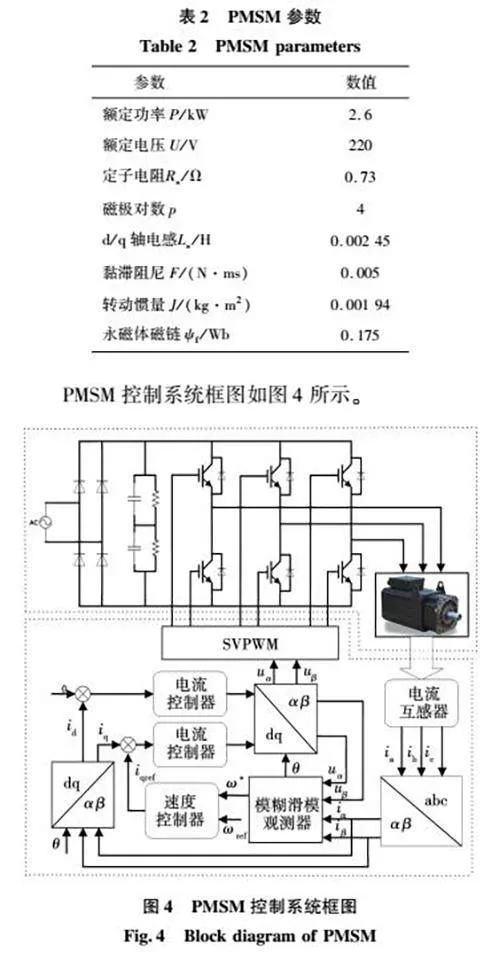
搭建Simulink模型以及搭建平台试验,验证本文所提控制策略,PMSM参数如表2所示。
FSTSMO、STSMO以及SMO系统仿真波形如图5~图12所示。
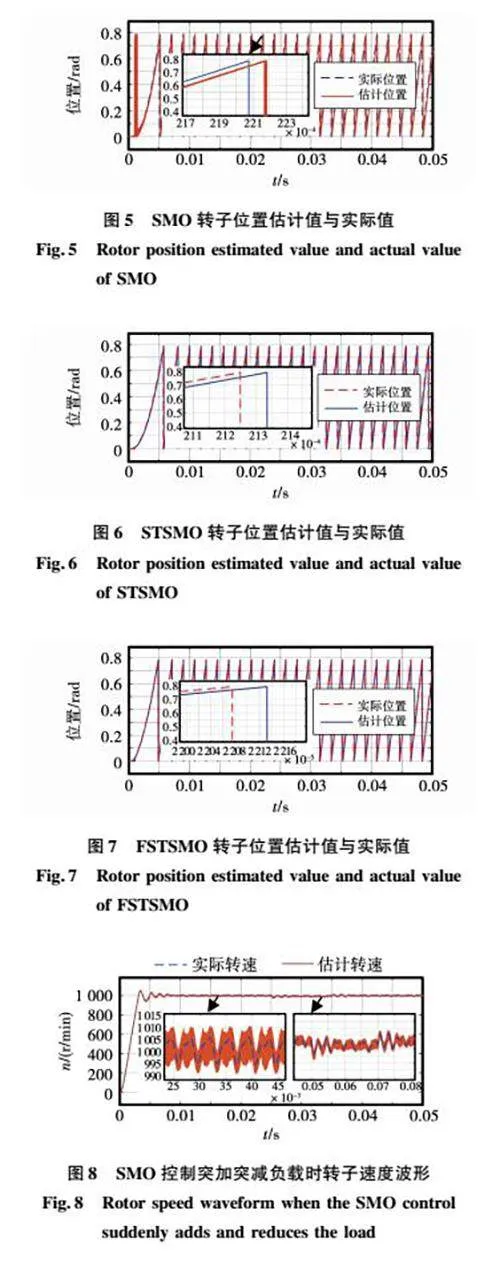
由图5、图6可知, STSMO控制相较于SMO控制提高了系统转子位置估计精确度。由图7可知,将模糊控制理论引入STSMO中,FSTSMO相比于STSMO转子位置估计更精确,系统控制性能更好。
设置仿真时间为0.1 s,给定阶跃转速指令为1 000 r/min,开关频率为10 kHz,突加突减负载为5 N·m,系统转子速度估计值与实际值仿真波形如图8~图10所示。
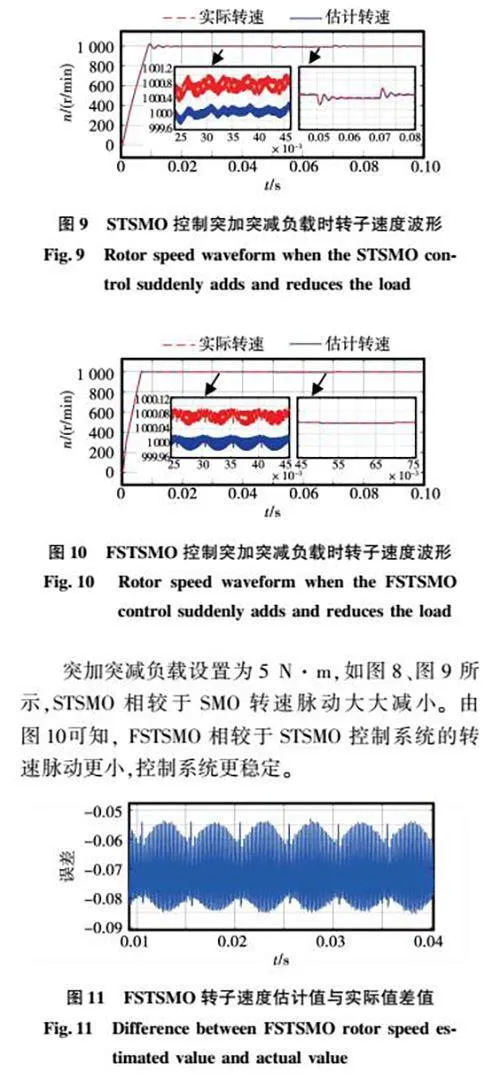
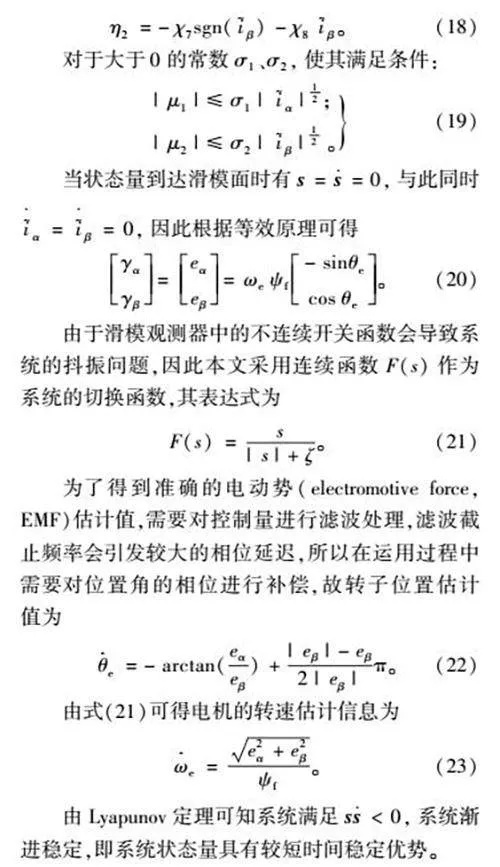
由图8、图9可知,给定转速为1 000 r/min,SMO控制存在较大的转速超调量,STSMO控制相较于SMO控制转速超调量较小,同时转速估计更加准确。如图10所示,将模糊控制理论引入STSMO中,可知FSTSMO相较于STSMO系统的转速超调量更小,削弱了系统的抖振,实现了更精确的转速估计。
突加突减负载设置为5 N·m,如图8、图9所示,STSMO相较于SMO转速脉动大大减小。由图10可知, FSTSMO相较于STSMO控制系统的转速脉动更小,控制系统更稳定。
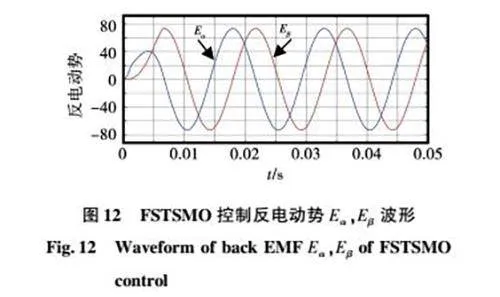
由图8、图9可知,SMO转子转速估计的波动较大,转速误差在-10~10 r/min之间,STSMO转速估计误差在-0.95~-0.45 r/min之间。由图10、图11可知,FSTSMO转子转速估计值与实际转速的差值在-0.085~-0.065 r/min之间。图12为FSTSMO控制反电动势波形,由波形可知,Eα与Eβ相差90°相位。
由文献[8]可知,传统模型参考自适应转速估计误差在8.1~10.6 r/min采用改进滑模-模型参考自适应方式时,转速误差估计在3.9~4.6 r/min。由文献[9]可知,扩展卡尔曼滤波转速估计误差值也远大于FSTSMO控制系统,可知所提出的FSTSMO控制转速估计更加精准,系统响应更稳定。
系统搭建控制试验平台如图13所示。
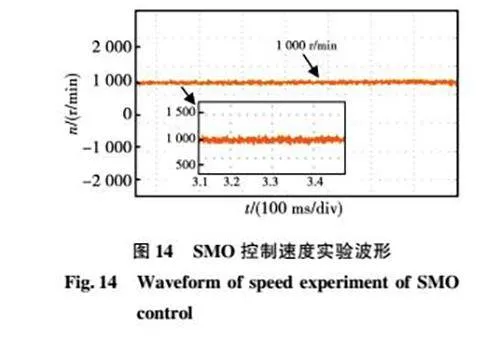
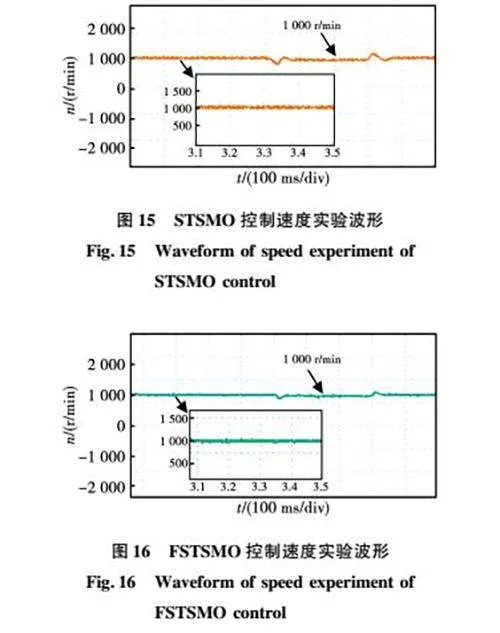
SMO、STSMO和FSTSMO的控制速度实验波形如图14~图16所示。由图14可知,系统给定转速为1 000 r/min,SMO控制存在较大的抖振,会影响系统的运行性能。
由图14~图16可知,STSMO相较于SMO控制大大削弱了系统抖振,提高了系统稳定性,FSTSMO控制相较于STSMO控制系统抖振更小,系统稳定性更强,以突加突减负载为突加状况时,系统有较短稳定时间优势。
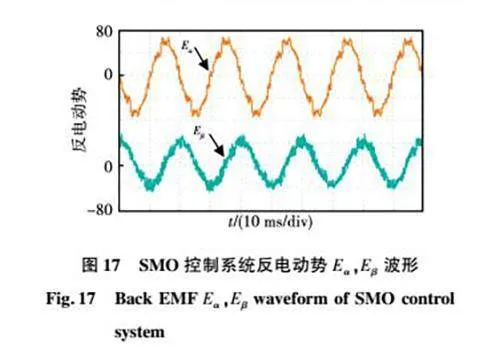
SMO、STSMO和FSTSMO控制系统反电动势波形如图17~图19所示。由图17、图18可知,STSMO相较于SMO控制其反电动势估计波形较平滑,提高了系统控制精确度,Eα与Eβ相差90°相位,进一步证明了反电动势估计的正确性。由图19可知,将模糊控制理论引入STSMO控制中,FSTSMO相较于STSMO系统控制精确度更高,系统更稳定。
本文提出的FSTSMO控制相较于SMO控制有效地削弱了系统的抖振,降低了转速波动,提高了转子位置估计精确度,能够以更短的时间达到系统稳定,提高系统稳定性。
5"结"论
本文提出了一种FSTSMO控制方案,将模糊逻辑理论引入STSMO控制中,设置模糊规则是以系统动态量趋近动态面的距离与趋动速度动态化为规则元素,以此来动态智能化状态量趋动速度,使得状态量趋近速度随着与滑模面的距离动态变化,同时进一步采用了连续函数F(s)代替不连续的sgn(s)符号函数,进一步提高了系统的稳定优势。
通过仿真和实验表明,FSTSMO控制大大提高了系统的稳定性,由仿真数据可知,FSTSMO系统转子位置估计误差为5×10-5 rad左右,转速估计误差在-0.085~-0.065 r/min之间,相较于SMO控制有更好的抖振控制优势,其得出的转子位置数据精确度和系统稳定性具有更好展现。
参 考 文 献:
[1]"WANG B,WANG Y, FENG L, et al. Permanent magnet synchronous motor sensorless control using proportionalintegral linear observer with virtual variables: a comparative study with a sliding mode observer[J]. Energies,2019,12(5): 1.
[2]"REN N, FAN L, ZHANG Z. Sensorless PMSM "control with sliding mode observer based on sigmoid function[J]. Journal of Electrical Engineering amp; Technology,2021,16(2):933.
[3]"LIN T C, ZHU Z Q. Sensorless operation capability of surfacemounted permanentmagnet machine based on highfrequency signal injection methods[J]. IEEE Transactions on Industry Applications,2015,51(3):2161.
[4]"ZHAO L, HUANG J, LIU H, et al. Secondorder slidingmode observer with online parameter identification for sensorless induction motor drives[J]. IEEE Transactions on Industrial Electronics,2014,61(10):5280.
[5]"王春风,赵青青,孟旭,等.直流电机的非奇异快速Terminal滑模位置控制[J].哈尔滨理工大学学报,2019,24(4):36.
WANG Chunfeng, ZHAO Qingqing, MENG Xu,et al. Non singular fast Terminal sliding mode position control for DC motors [J]. Journal of Harbin University of Science and Technology, 2019, 24(4): 36.
[6]"LIANG D, LI J, QU R, et al. Adaptive secondorder slidingmode observer for PMSM sensorless control considering VSI nonlinearity[J].IEEE Transactions on Power Electronics,2017,33(10):8994.
[7]"GONG C, HU Y, GAO J, et al. An improved delaysuppressed sliding mode observer for sensorless vectorcontrolled PMSM[J]. IEEE Transactions on Industrial Electronics,2020,67(7):5913.
[8]"王栋.基于滑模-模型参考自适应的异步电动机无速度传感器控制[D].西安:西安理工大学,2021.
[9]"程梁, 王维强,余天赐,等.基于无迹卡尔曼滤波的永磁无刷电机转矩脉动抑制研究[J].大电机技术,2021(6):10.
CHENG Liang, WANG Weiqiang, YU Tianci, et al. Research on torque ripple suppression of permanent magnet brushless motor based on unscented Kalman filtering [J]. Large Electric Machine and Hydraulic Turbine, 2021(6):10.
[10]"祝新阳,曾国辉,黄勃,等. 改进滑模观测器的永磁同步电机矢量控制[J].信息与控制,2020,49(6):708.
ZHU Xinyang, ZENG Guohui, HUANG Bo, et al. Improving the vector control of a permanent magnet synchronous motor for a slidingmode observer [J]. Information and Control, 2020,49(6): 708.
[11]"张伯泽,宗剑,钱平.基于滑模变结构控制的内置式永磁同步电机无位置传感器矢量控制[J].电机与控制应用,2020,47(8):36.
ZHANG Boze, ZONG Jian, QIAN Ping.Built in permanent magnet synchronous motor based on sliding mode variable structure control [J].Electric Machines and Control Application, 2020,47(8): 36.
[12]"张紫君,熊官送,曹东海.基于无位置传感器的永磁同步电机控制技术研究[J].导航定位与授时,2020,7(4):102.
ZHANG Zijun, XIONG Guansong, CAO Donghai. Research on the control technology of permanent magnet synchronous motor based on no position sensor [J]. Navigation, Positioning and Timing, 2020,7(4): 102.
[13]"张文宾,缪仲翠,余现飞,等.基于改进型滑模观测器的永磁同步电机分数阶微积分滑模控制[J].电机与控制应用, 2018,45(7):8.
ZHANG Wenbin, MIAO Zhongcui, YU Xianfei, et al. Fractional calculus sliding mode control of a permanent magnet synchronous motor based on a modified sliding mode observer [J]. Electric Machines and Control Application, 2018,45 (7): 8.
[14]"陶彩霞,赵凯旋,牛青.考虑滑模抖振的永磁同步电机模糊超螺旋滑模观测器[J].电力系统保护与控制,2019,47(23):11.
TAO Caixia, ZHAO Kaixuan, NIU Qing. A fuzzy super helical sliding mode observer of a permanent magnet synchronous motor considering sliding mode shaking [J]. Power System Protection and Control, 2019,47(23): 11.
[15]"赵凯旋.基于滑模变结构永磁同步电机控制系统抖振问题的研究[D].兰州:兰州交通大学,2019.
[16]"徐冬磊.基于滑模变结构的永磁同步电机矢量控制研究[D].武汉:华中科技大学,2019.
(编辑:邱赫男)
收稿日期: 2022-04-11
基金项目:国家科技助力经济2020(Q2020YFF0402198);黑龙江省科技攻关资助项目(GC04A517)
作者简介:禹"聪(1997—),男,硕士研究生,研究方向为永磁同步电机及其控制;
康尔良(1967—),男,博士,教授,硕士生导师,研究方向为电机测试与电机控制。
通信作者:康尔良
