隔震支座骨架板平面度检测及误差补偿
2024-04-30孙宏昌乔英伟蒋永翔夏红超井平安邓三鹏
孙宏昌,乔英伟,蒋永翔,夏红超,井平安,邓三鹏
1.天津职业技术师范大学机器人及智能装备研究院;2.天津市智能机器人技术及应用企业重点实验室;3.清华大学基础工业训练中心
0 引言
隔震支座作为结构的隔震层,具有阻尼消能和一定的自动复位能力,保护了建筑结构免受地震的破坏[1]。目前,常用的隔震支座主要由橡胶与骨架板交替叠合而成,可以承载较大竖向力,同时又具有良好的变形能力[2]。但骨架板的平面度会影响与橡胶之间贴合效果,导致支座呈倾斜状态,从而引发受力和变形不均匀、承载能力低等问题。所以在隔震支座安装过程中,为确保安装精度满足要求,需要多次检测部件的平面度和整体的水平度[3]。隔震支座性能的优劣极大程度地影响着隔震体系的安全和可靠水平[4]。
自动化骨架板生产线的平面度检测一直是行业难点,由于骨架板在运动中会产生振动,人工采用标准检测工装或游标卡尺等物理接触方法进行检测变得低效。近年来,制造零件的测量和检测主要由三坐标测量机完成[5],W.S.Kim[6]使用坐标测量机对物体表面进行数据收集和拟合,开发了关于抽样策略和样本量的优先级方法进行准确采集。但是接触式的探针容易损害待测表面,具有探头磨损、效率低的缺点[7]。刘希军等[8]提出了基于电涡流位移传感器布点平面度检测系统,但存在运动状态的被测物体布点困难问题。随着国内视觉技术的不断发展,非接触式的光电测量方法已经开始应用于工业生产中。谢文成等[9]提出基于机器视觉和激光测量的自动化平面度检测系统,提出了利用单应矩阵和边缘优化的测量方法,有效地获得了平面度。谭文等[10]研制了基于机器视觉的3D激光测量系统,结合改进的Sobel算子边缘特征提取与图像预处理等方法,实现精度为0.1 μm的高精度测量。但这些研究并没有解决被测物体运动过程中振动影响采集图像准确性的问题。为此,许多学者在不同领域提出了误差补偿办法。M.Alonso[11]提出由2个线激光器和1个传统的2D相机组成的扁平金属板实时表面平面度估计系统,并引入了去除板材运动引起的振动噪声滤波方法,实现了至少41%的表面重建精度的改善,平面度平均误差为0.25 mm。L.Han[12]针对环境振动导致的测量误差问题,提出了多频移相式三维传感器振动检测和运动补偿,采用基于单应性矩阵的振动误差补偿方法来校正封装相位图之间的像素对应性,实验结果为3D重建物体尺寸平均偏差为0.109 mm。卞绍顺等[13]提出基于加速度传感器的振动点云补偿方法,在相机中引入加速度传感获取3个方向的位移量,通过旋转变换校正点云坐标。经补偿后,点云尺寸测量误差由±0.9 mm降低至±0.1 mm。D.Ding[14]运用激光测量复杂的轮廓,引入角度补偿和位移补偿提高倾斜轮廓精度,补偿后测量精度提高到-7.4~+6.7 μm,应用校正公式提高曲线轮廓精度,精补偿后比原始轮廓减小了91.9%。
本文提出了一种基于激光传感器和振动误差补偿的非接触平面度检测系统。首先,对骨架板表面进行点云数据采集,引入滤波算法和精简算法优化点云,完成振动补偿前的处理;其次,引入振动补偿算法,有效降低了振动对采集的点云的影响;最后,对传统最小二乘法进行改进,引入Z轴坐标,进一步计算出骨架板的平面度。实验结果表明:提出的检测系统误差小于0.20 mm,具有结构简单、测量精度高、测量效率高、自动化能力强等优点。
1 检测系统方案与原理
1.1 方案设计
面向连续生产环境下的隔震骨架板平面度在线检测算法流程如图1所示,所提出的检测方法主要分为3个阶段。具体算法过程如下:
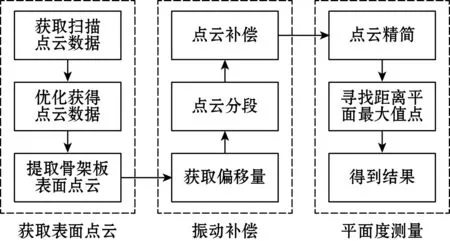
图1 隔震骨架板平面度在线检测算法流程
1)基于线激光传感器的骨架板表面点云数据获取:线激光扫描获取骨架板点云数据;利用滤波算法进行点云数据优化;
2)基于电感位移传感器的骨架板三维点云数据补偿:读取骨架板点云数据,将点云分段;利用电感位移传感器获取振动偏移量;遍历每段点云,将振动偏移量写入对应点云数据,进行补偿;
3)骨架板平面度的测量:将点云数据精简,拟合点云平面,遍历每个点寻找与拟合平面距离最大值的点,得到平面度值。
1.2 检测系统原理
本系统选用LJ-X8900系列激光传感器,Z轴测量精度为10 μm。该传感器采用三角测距原理,将线型激光照射到被测物表面,反射光经过成像透镜组后被相机接收形成条纹图像,根据条纹图像在相机上的成像位置可计算被测物表面的三维坐标,其中Y轴坐标值为0,因此,线激光扫描仪每测量一帧就得到一组在XOZ平面内沿X轴等距分布的线状二维数据点。该系统可划分为3个模块:数据采集模块由激光传感器及其控制器组成;运动控制模块由伺服电机和丝杠传动机构组成;数据处理模块由数据采集卡和上位机组成。通过这样的模块划分,该系统实现了从数据采集到运动控制再到数据处理的完整流程。每个模块的功能协同工作,为骨架板的平面度检测提供了可靠的支持,线激光平面度检测系统如图2所示。

图2 线激光平面度检测系统组成
为了获得隔震支座骨架板表面完整的三维点云数据,将线激光扫描仪固定在定制的支架末端,由丝杠传动机构驱动运动平台以速度v沿Y轴负方向匀速扫描。设第1帧的三维点云坐标中y=0,则扫描系统空间分辨率d,即相邻两帧的Y轴增量为d=v/f,f为采样频率,这样便可得到骨架板完整的三维点云,如图3所示。
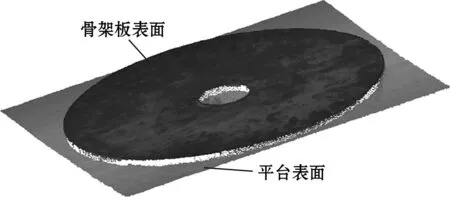
图3 骨架板点云
扫描线点在骨架板位置处被骨架板截断成3段,根据骨架板与平台的点云位置关系可分为骨架板点云和平台点云。因骨架板具有一定的厚度,存在边缘处会有部分点分布在骨架板外壁上的问题,需要对点云数据进行滤波优化。平台点云位于Z轴最下方,骨架板点云在平台点云上方沿Z轴正方向分布,故对点云进行Z轴直通滤波即可得到骨架板点云。Z轴直通滤波原理如下:
设点云中每个点为Pi,Pi=(xi,yi,zi),设定a≤zi≤b,遍历每个点,比较它们的Z轴坐标是否在设定的范围(a,b)内,符合则保留,否则被剔除。即得到的点云为
{Pi=(xi,yi,zi)|a≤zi≤b}
利用此原理遍历整个点云数据得到骨架板表面点云,如图4所示。
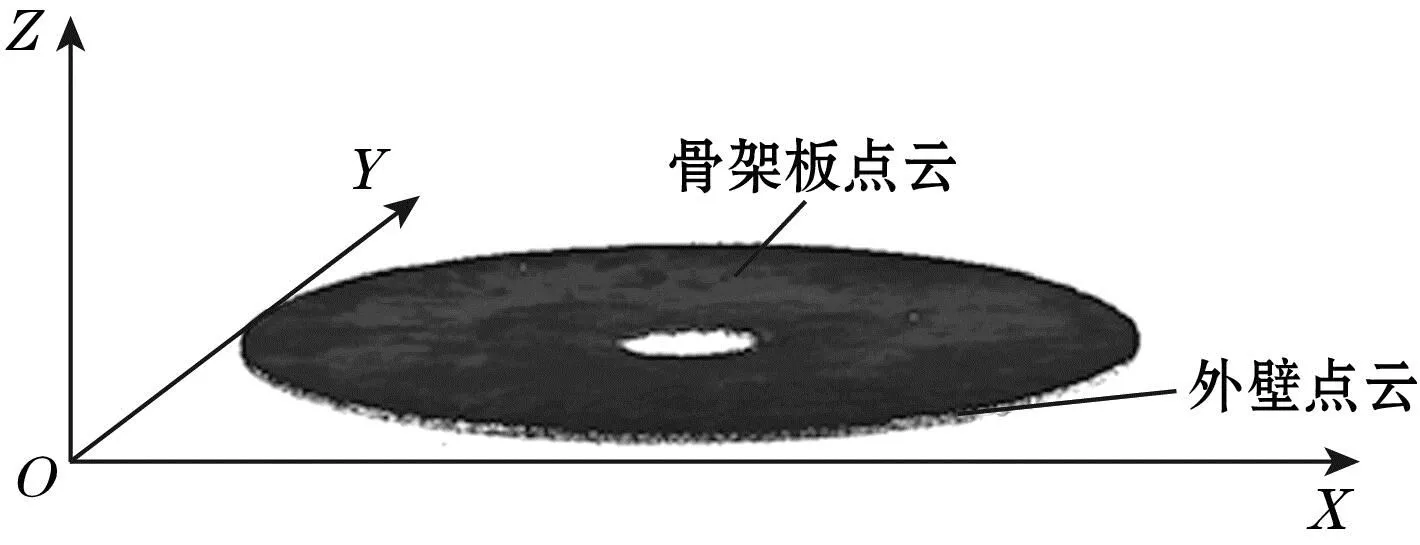
图4 骨架板表面点云
通过直通滤波的方式获得的骨架板点云存在部分外壁点,这将影响平面度的评定。本研究采用离群值滤波器对点云剔除外壁点,具体步骤为:
1)遍历每个点P,寻找其附近的k个点;
2)计算点P到k个附近点的平均距离μ和标准差σ:
(1)
(2)
式中di为点P到附近点的距离。
3)计算距离阈值D:
D=μ+m×σ
(3)
式中m为倍数。
4)依次将每个点到附近点的距离d与距离阈值D比较,超出阈值的点被标记为离群点,并剔除,得到如图5所示剔除噪点后的骨架板点云。
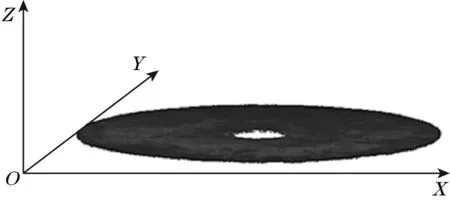
图5 离群值滤波点云
2 云数据误差补偿
本研究采用定制的运动平台,并在测量前对导轨进行水平校正,从而认为运动平台是绝对水平面。通过获取平台每时刻的振动偏移量,在上述已提取的骨架板表面点云数据坐标系中,将该偏移量写入点云坐标,从而对平台振动带来的点云偏差进行补偿,主要步骤为获取振动偏移量和点云补偿。
2.1 获取振动偏移量
在不同位置安装电感位移传感器,利用电感的变化映射平台每时刻的微小位移量,当平台运动时,传感器会记录X、Y和Z坐标方向生成的位移曲线。由于运动平台工作时会产生一定程度的倾斜,考虑其倾斜的角度非常小,可以忽略,所以该三坐标位移曲线即为此时点云数据的补偿量。
运动平台振动测量系统如图6所示。在A、B、C、D、E、F点处安装电感位移传感器,A、B、C、D处测量移动平台到平台基座上表面的距离,E、F测移动平台到平台基座侧面的距离。令在初始位置时6个电感位移传感器的位移数值分别为ha、hb、hc、hd、he、hf,平台移动过程中某时刻的位移数值为hA、hB、hC、hD、hE、hF。

图6 运动平台振动测量系统
偏差的分析过程如下:
1)A点和B点传感器数据,体现的是平台绕X轴的旋转,导致Z轴的偏移:
(4)
2)C点和D点传感器数据,体现的是平台绕Y轴的旋转,导致Z轴的偏移:
(5)
式中L为点C和点D两点的距离。
3)E点和F点两传感器数据,体现的是平台绕Z轴的旋转,导致X轴的偏移:
(6)
2.2 点云补偿
在振动偏移量获取完成后对点云进行几何误差补偿,遍历所有点云数据,按Y坐标以分辨率d分段,该段测点坐标为
pi′=pi+Δpi
(7)

点云数据继续沿Y向步进分辨率值,利用式(7)调整该段所有点云坐标值,直到遍历所有点云数据结束。图7为点云补偿前后对比图,点云受到Z轴方向和X轴方向的补偿,所有点云补偿后将使骨架板点云更加平稳。

图7 点云补偿前后对比
3 平面度评定
3.1 骨架板点云精简

1)初始化一个空的体素网格,设置网格大小为r;


(a)精简前
3.2 三维最小二乘法测量
点云数据经过提取骨架板表面区域,并进行振动误差补偿和点云精简后,此时进行平面度的评定既准确又高效。本研究基于最小二乘法进行拟合平面度评定,最小二乘法是在二维空间中,利用已有点(xi,yi)找到一个拟合直线y=ax+b,使得所有点到这个直线的距离平方和最小,然后计算所有点到这条拟合直线的距离,求取最大值即为平面度。但考虑本研究所获取点云为三维空间点云,需要在此基础上加入z向进行升维。主要原理如下。
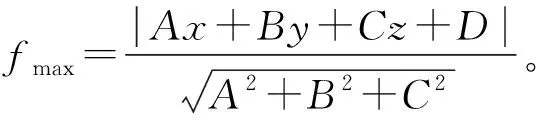
如图9所示,设三维最小二乘拟合平面F3D(评定参考平面)的单位法向量为(A、B、C),则平面F3D的方程为

图9 三维点云平面度评定示意图
Ax+By+Cz+D=0
(8)

即z=ax+by+c。

(9)

(10)
则
(11)
经上述分析,利用visual studio2022软件编译三维最小二乘法,并随机选取30块骨架板对其进行平面点的数据采集,骨架板点云振动补偿前后平面度测量结果如图10所示。
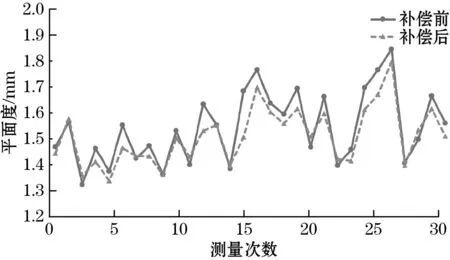
图10 补偿前后平面度值
为验证该方案提出的骨架板平面度测量系统的准确性,引入BDC1086RD型三坐标测量仪进行平面度测量,它的分辨能力为0.001 mm,测量精度为0.002~0.005 mm,测量环境与步骤严格按照标准执行。利用上述2种方法测得的平面度结果及误差如图11所示。
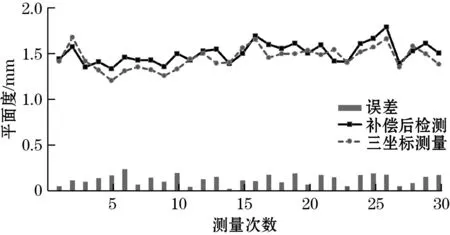
图11 骨架板系统检测与三坐标测量平面度结果
3.3 结果分析
对照实验结果表明,震动误差补偿后的点云数据相较三坐标测量仪评定结果总体一致,误差均小于0.20 mm。主要原因是本研究通过获取每帧运动平台的偏移量,将该误差值补偿至已获取的点云数据坐标上,精简后对骨架板表面全部三维点云进行最小二乘估计,因此结果较为接近。采用三坐标测量仪评定结果较小的原因是参与评定的点数较少,难以完全反应实际的平面误差。因此,本文所提出的隔震骨架板平面度测量系统更适合于现场在线大批量测量场合。
4 结论
本文提出了一种基于点云处理的非接触测量系统。为验证该方法的有效性,利用精密仪器三坐标测量仪对隔震支座骨架板表面进行坐标测量,得到骨架板的平面度。采用测点坐标的误差补偿方法,通过测量平台运动过程中每时刻的偏移量,在已获点云数据上进行坐标变换,实现了对运动平台振动引起的系统误差自动补偿。通过改良最小二乘法对三维点云数据进行拟合理想平面,计算每个测量点到理想平面的偏距值,可以得到待测表面的平面度。测量试验结果表明:该方法具有测量精度高(测量误差小于0.20 mm)、自动控制(平面度质量自动评价)的特点。 与现有的研究方法相比,该系统操作简单方便,适合工业生产线作业。
