基于无人机的光伏电站智能巡检研究
2024-04-29万斌李密娜
万斌 李密娜

摘要:光伏发电已成为能源行业的重点项目,光伏发电站的数量也越来越多。其中,光伏板的故障与缺陷不可避免,可以利用无人机智能巡检技术监测,及时维护处理,提高电站运行的稳定性。本文通过分析无人机智能巡检系统的组成,进一步分析基于无人机的光伏电站智能巡检技术应用,以供参考。
关键词:智能巡检;无人机设备;光伏发电
DOI:10.12433/zgkjtz.20240106
一、研究背景
近年来,国内尤为看重清洁能源中太阳能的应用,为光伏发电产业的发展奠定了良好基础。光伏发电站通常是建设光伏面板吸收太阳能,再经过转化获得电能,但光伏面板的巡检工作难度较高,主要是长期暴露在自然环境中且分布面积通常较大,容易出现多种复杂缺陷,例如,遮挡、破碎以及隐裂等,及时发现这些缺陷并进行维护处理,对于提高光伏发电站发电效率而言具有重要意义。以往面板发电监测的方法智能局限在某个时间或某个范围,在故障定位上也不够准确,因此,需要研究和应用光伏电站智能巡检技术,解决光伏面板巡检较困难的问题,提高故障监测的实时性和准确性。
二、无人机智能巡检系统的组成
(一)多旋翼无人机设备
以无人机飞行为基础的智能巡检系统中,多旋翼无人机设备是核心硬件之一,这种设备是指具有三个或三个以上旋翼轴设计的特殊结构无人自动驾驶直升机,主体结构包括飞行器、主机身、飞机控制系统、旋翼安装架、起落架以及功能吊舱等部分。多旋翼无人机飞行时的操控性颇强,能进行垂直悬停与起降,适合应用在低速、低空以及有悬停和垂直起降需求的智能飞行任务,例如,设置在特殊区域位置的光伏电站,应用该设备实现飞行巡检效果较佳,目前对光伏电站日常缺陷的及时排查也首选民用无人机设备。另外,在选择无人机型号时,要注意选择精度较高、续航能力较强且满足日常巡检需求的类型,确保能在跨地域、跨空间长时间执行巡检任务。
(二)云台相机
无人机在飞行过程中,为了保证成像设备获取图像信息的稳定性,通常会将成像设备安装到对应云台上,确保云台控制俯仰和水平转动,提高拍摄质量。其中,云台相机包括红外成像云台相机、可见光云台相机以及近红外成像云台相机等,其中热红外相机主要是对光伏电站组件热斑区域获取、识别;可见光相机是拍摄相关组件的可见光图像,用来识别组件是否存在污损、破裂等不良问题;近红外相机用来拍摄组件EL图像,也能识别光伏组件电池片位置是否存在隐裂问题,实现全面巡检。
(三)无人机机库
为了进一步提高多旋翼无人机在诸多应用领域的巡检效率,还要设置无人机自动机库,以此减少人力资源投入,降低运营维护成本。机库的设计一般为封闭式舱体,具有防尘和防水的特性,与环境感知传感器良好融合,在各类较为复杂的外部环境下都能远程操控完成巡检任务,且巡检中支持精准化降落以及自动充电换电。无人机机库本身也会与远程监控中心通过网络实现连接,确保无人机设备的链路通讯良好,对于安装位置选择,要以便于提供220V供电以及接入光纤为标准。
(四)环境感知模块
无人机智能巡检系统的环境感知模块设置了多种类型传感器,将获取到的环境信息发送给远程监控系统,感知获得的环境信息,包括实时风向、风速、温度、降雨量以及湿度等,其中,监测气象信息为重点,能为无人机设备是否能执行作业提供参考,也能监测设备实际运行状态,具体是通过无人机起飞降落状态和无人机机库状态来判断。机库旁边会安装上气象监测装置,通过准确预测气象变化制定合适的巡检计划,确保远程飞行和超视距飞行的可靠进行。
(五)远程监控模块
在无人机记录借助网络和实现通讯过程中,远程监控模块发挥着重要功能,主要是实时接收回传的状态数据和超清视频信息,再与机库、无人机达成联动作业,形成一整套自动化远程操控的流程,有效制定任务计划,确保巡检任务的自动执行、良好检测以及远程操控。同时,无人机设备也能自动化定时起降,按照预先设计的航线完成巡检,顺利进行建图航拍。
(六)电源分配监测模块
由高速MCU控制器和高精度电量采集芯片组成的电源分配监测功能模块,其中融合运用了数据通信与电测量技术,可以采集光伏电站发电的电流、电压、功率以及电能信息,再分析电源配置情况。这种监测模块的性能较为稳定、测量精度也较高,且实际数据信息能直观显示,在操作上极为便捷,同时还具有性价比较高的优点,故而目前在光伏电站的电能测量和管理中广泛应用。
(七)智能应用模块
无人机智能巡检系统的智能应用模块,是基于以往的常规飞行控制,进一步结合深度学习算法和人工智能技术开发的一种高级应用系统。在进行光伏电站巡检时,可以发挥巡检路径规划功能、缺陷识别与定位功能以及故障跟踪功能。其中,巡检路径规划主要基于实际光伏电站情况和任务目标设计优质的巡检方案;缺陷识别和定位模块主要借助图像识别技术,自动识别光伏组件出现的故障或异常,并对组件缺陷进行厘米级的定位;故障跟踪是指根据故障的类型与具体严重程度,为无人机制定额外跟踪飞行的计划,在飞行时可以提供精确的故障导航服务,为深入分析故障奠定基础。
三、基于无人机的光伏电站智能巡检技术应用
(一)巡检技术路线
以无人机设备为基础的光伏面板智能电源巡检系统中,包括各类硬件与软件模块,例如,其中的云台相机可以与无人机飞行配合,搭建用于数据采集的硬件模块,而数据采集的控制可运用航线自动规划技术,在数据分析过程中,借助缺陷识别及定位的软件模块。例如,在某光伏电站无人机智能巡检项目中,采用的无人机飞行平台为大疆经纬M300RTK型号,特点是结合RTK技术实现实时动态测量,具体测量定位精度可达到厘米级,每架次飞行的实际续航时间在45min以上,确保对应巡检工作的高效、可靠完成,其搭载的云台相机型号为大疆禅思H20T,包括1个变焦相近、1个广角相机、1个红外相机以及1个激光测距传感器装置,其中可见光变焦相机的有效分辨率达到2000万像素,而红外相机的分辨率为640×510像素,还具有一定的热灵敏度,可以满足巡检任务中的成像质量相关需求,获取视场的可见光与红外图像信息,为后续的缺陷检测和缺陷问题类型判断奠定良好基础。无人机的云台相机数据采集平台如图1所示。
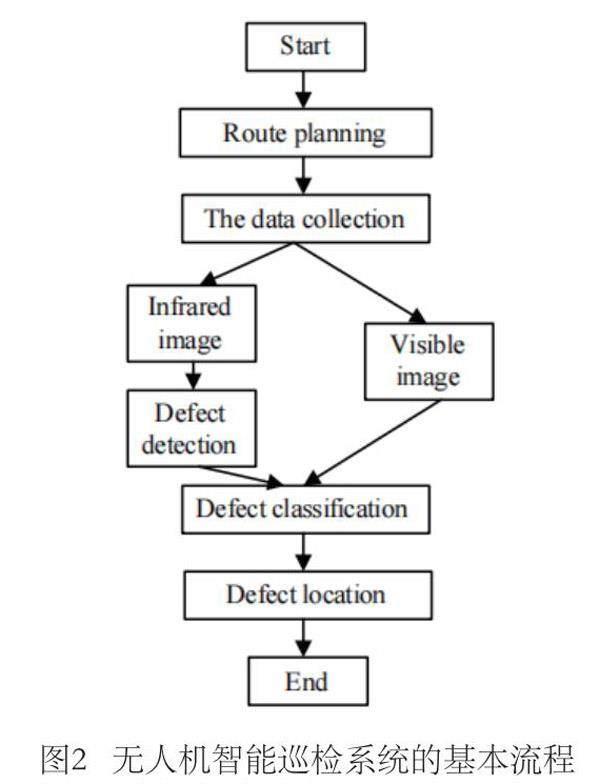
无人机智能巡检实现的相关流程如图2所示。需要对光伏电站面板区域进行科学划定,进一步调整镜头参数、画面重叠率以及飞行高度等,借助精准算法规划生成智能巡检任务航线,使搭载着可见光相机与红外热成像相机的无人机设备起飞,自主采集光伏电站数据信息,获得的图像数据经过分析与处理以红外图像为基础检测并分割光伏面板的热斑情况,并结合可见光图像判断热斑区域的缺陷情况,依据照片位置并借助姿态系统数据,基于相机成像模型分析准确定位缺陷位置。
(二)缺陷检测与定位
1.缺陷检测
缺陷检测是光伏电站无人机智能巡检的关键环节,主要借助红外图像将热斑区域内的异常情况检测,具体被归划到计算机视觉目标检测的任务范围。近年来,目标检测领域开始运用人工智能技术,主要以深度学习为基础实施检测,但这种方法更多依赖大量人工标注处理数据,在准备工作上需求更大,同时对应算法的执行效率较低,故本研究采用具有自适应特性的动态阈值分割方法,辅助缺陷检测的顺利进行,具体算法步骤包括:一是进行预处理;二是分割提取热斑;三是判断异常原因。缺陷的信息采集也可在其按照航线飞行时,基于等间距或等时间来拍照,实际采集到的数据可能存在较多背景,给缺陷检测的识别和工作效率造成不良影响,故而要对图像做前景分割提取处理。光伏面板的特点是在具有水面背景时的灰度值差距过大,因此实际计算求得的分割阈值也能让前景和图像背景信息间方差增大,最大阈值参数即为所求。分割处理后的二值图像还存在边界不够平滑、斑点噪声影响等问题,因此要进一步实施闭运算与开运算,获得较完整的背景和前景。其中,闭运算能对前景区域孔洞实现填补,开运算要腐蚀后进行膨胀,促使边界变得更为平滑,并去除背景区域的噪声影响。
完成前处理任务后,要想提高缺陷的识别率,还应增强原图像,进一步凸显缺陷,并抑制噪声,具体步骤包括:第一,选择3×3像素规格的结构元当作增强系数计算的局部窗口;第二,在计算窗口内围绕着中心点均匀布置8个像素点,计算获得其标准差;第三,计算窗口的增强系数,使其成为中心像素点的新像素。图像经过增强处理之后,采用自适应性质的动态阈值方法分割提取红外图像热斑部分,这种方法计算下每个像素点都能获得一个阈值,先是基于15×15的局部窗口实施运算,再对每个像素进行高斯加权和计算,将动态阈值减去,得到需要的阈值,黑色像素通过检测标出再映射到原图,进而识别热斑位置。
与利用大津法计算提取前景信息并关注全局灰值度不同,采用自适应性质的动态阈值分割,只会对局部灰度差异有所关注,且每个像素点都要对阈值单独计算,降低天气变化造成的光强改变成像差异负面影响,提高缺陷检测识别率。另外,通过红外图像分析并检测出热斑位置后,还要依据可见光图像与红外图像间的对应关系,判断缺陷区域的缺陷类型,包括异物遮挡缺陷、内部缺陷以及碎裂缺陷等,以此让运维人员有针对性的制定维护方案,并采用维修、清洗以及更换等手段。
2.缺陷定位
从检测到的图像中进行光伏电站实际缺陷位置定位,定位结果呈现在真实地理坐标系中,将缺陷区域从图像坐标系进一步映射到坐标系上,缺陷在图像坐标系中级地心地固坐标系中往往具有一些变换关系,例如,地心地固坐标系和相机坐标系之间存在平移、旋转关系,通过具体坐标实现转换,而坐标参数值可通过拍摄坐标的相机POS数据求解获得,首先,要确定相机内参矩阵;其次,将相机坐标系空间点投射到像素坐标系中,通过标定即可获得坐标;最后,借助逆映射将图像检测获得的缺陷进一步转换至地理坐标系中,有效定位缺陷位置。
(三)试验结果与讨论
光伏电站无人机智能巡检技术在某电站进行了固定路线的巡检试验,该光伏电站主要运用在池塘上建设光伏面板进而完成发电的技术。但光伏电站运维工作实施比较困难,传统运维手段的应用已无法满足需求,故此决定应用基于无人机的光伏电站智能巡检模式,设计合理的航线图,实际划定光伏板研究区域面积约为200000m2,总规划的航线长度高达10000m,预计完成一次巡检任务的总时长在1h左右,通过两个架次就能完成数据采集任务。试验中无人机试飞按照提出的方法在3min巡检内采集图像约1200张,对图像信息进一步分析处理获得对应结果,相关检测结果统计中,热斑有102处,实际热斑区域检出率达95%,切实满足工程项目的应用需求,优于传统巡检方式,其搭建的数据采集平台也能良好运行。光伏面板的缺陷判别和定位是运用机器视觉技术,检测到的缺陷信息会进一步通过深度学习方式分析处理,满足高效运维的场景需求,可以提高巡检精度与效率,证明基于无人机的智能巡检技术具有可行性和有效性。
四、结语
综上所述,当前光伏电站巡检正不断研发智能巡检技术,改变以往巡检实时性与准确性不足的情况,现阶段关于无人机智能巡检技术的应用较多。通过分析可知,基于无人机的光伏电站智能巡检技术在实际应用过程中,应规划好巡检技术路线,再实施缺陷检测与定位,通过试验判断技术应用的可行性。
参考文献:
[1]张朋飞.基于监测系统的光伏电站智能运维中巡检装备的应用研究[J].太阳能,2023(06):77-81.
[2]张永伟,李贵,马玉权,等.基于高精度快速故障识别的智能光伏视频巡检系统研究[J].电力信息与通信技术,2023,21(06):73-78.
[3]李德维.光伏电站组件诊断中无人机智能巡检的应用[J].光源与照明,2023(01):102-105.
[4]王浩,闫号,叶海瑞,等.基于无人机的光伏电站智能巡检[J].红外技术,2022,44(05):537-542.
[5]郭智俊,丁莞尔,周剑武,等.无人机智能巡检在光伏电站组件诊断中的应用[J].能源工程,2022,42(02):40-44.
作者简介:万斌(1980),男,江西省波阳县人,研究生,高级工程师,主要研究方向为信息通信、网络安全、新能源发电。