大型飞机结构强度试验姿态转换与控制
2024-03-14燕晨耀尹伟杜星田文朋吝继锋
燕晨耀,尹伟,杜星,田文朋,吝继锋
(中国飞机强度研究所,强度与结构完整性全国重点实验室,陕西西安 710065)
0 前言
飞机结构强度试验是为了模拟飞机飞行载荷而进行的结构强度地面验证试验,其实施过程始终在试验件地面支持的状态下进行。试验机在交付时,一般处于托架支持状态,试验机从托架状态到试验支持状态,需进行飞机移位、提升以及支持夹具安装等飞机姿态的转换。如何保证试验件安全、高效、准确地到达预定试验位置且尽早满足试验状态,是结构强度试验中的重要研究内容[1-3]。
传统的大型全尺寸试验机提升方式需要在机身和机翼上选定的吊点处粘贴足够的胶布带,多个提升设备分别连接在不同吊点处,通过吊车和人员的配合,试验机在统一指挥下由人工操作各提升设备进行逐级提升。传统飞机提升与安装支持夹具过程存在一定的风险和问题:多个提升设备间的协调性差,导致各点提升速度不统一,飞机姿态不易控制,存在与承载框架碰撞的风险;个别提升设备提升过程并非完全垂向运动,提升达到试验支持的安装高度后,航向或侧向的安装位置不准确,因受限于提升设备的运动轨迹导致其位置难以准确调整,上支持夹具困难,调整时间较长;大型飞机的机身、翼展尺寸及质量较大,存在胶布带脱落或承载结构过载失稳的风险,因难以设置保护措施,存在较大的安全隐患。如何保证大型试验机姿态转换过程的安全性、协调性及实施效率,一直以来是飞机结构强度试验技术人员关注的问题[1-3]。
本文作者以大型飞机全尺寸静力试验机为例,提出一种大型飞机结构强度试验姿态转换与控制技术。通过位移提升装置和全浮动式支持平台设计,形成可靠的飞机姿态转换系统,确保飞机姿态转换过程高效且安全;通过多点协调位移控制方案设计,确保飞机姿态平稳提升且协调可控;通过研究飞机姿态实时测算方法,开发可视化监控系统,确保飞机姿态信息准确捕获且可视化。
1 飞机姿态转换与控制原理
为避免传统的提升方式中胶布带脱落或承载结构过载失稳的风险,将飞机吊点设置在相对刚度较大的3个起落架处,通过在飞机的每个起落架处设置双位控双连接回路,采用协调加载控制系统进行六通道位控提升。在协调加载控制系统中,采用载荷谱的形式进行自动位移加载,利用载荷谱命令与位移传感器反馈形成基于误差的闭环控制回路,通过闭环控制算法和指令优化算法保证多点提升过程的控制精度和协调性。为保证姿态动态转换过程中试验件的安全,通过实时测算飞机姿态相关的位移、角度及重力分布等多维信息,实时解算飞机提升过程中的高度、俯仰角、滚转角,实现飞机姿态的实时监控及可视化,当飞机姿态发生异常时,设计分级保护机制,使得飞机姿态全程可控。
为满足飞机提升后快速安装定位和支持/加载随动需求,设计专用的全浮动支持平台,支持装置上框与升降平台的滚珠层采用了面与面接触的设计理念,支持装置上框与起落架支柱连接形成3个吊点,3个起落架垂向支持形成支持平台,全浮动支持面与面对接快速完成夹具安装,实现整机安全高效提升与支持夹具快速安装。文中提出的飞机姿态转换与控制方案示意如图1所示。
2 飞机姿态转换系统
2.1 位移提升装置
传统的位控作动缸在大行程位移加载过程中,作动缸的推力杆存在一定幅度的旋转,极易造成内嵌式位移传感器的损坏,而内嵌式的位移传感器维护和计量标检困难[4-5]。对伺服液压位控作动缸进行改造设计:在作动缸的两侧各外置固定一套位移测量装置,在液压作动缸推力杆的负载端固定一套防旋转组件。位移测量装置具体是在小型活塞筒中内置磁致伸缩位移传感器,小型活塞筒易拆卸,方便位移传感器的维护和标检。防旋转组件主要由液压作动缸连接拉杆、固定专用件、滚动轴承、位移传感器连接可转专用件组成。液压作动缸推力杆在大行程加载过程中产生旋转运动时,传感器连接可转专用件通过防旋转组件内部的滚动轴承克服旋转趋势,保持位移传感器连接部分的姿态固定。改造后位控作动缸的结构形式如图2所示。
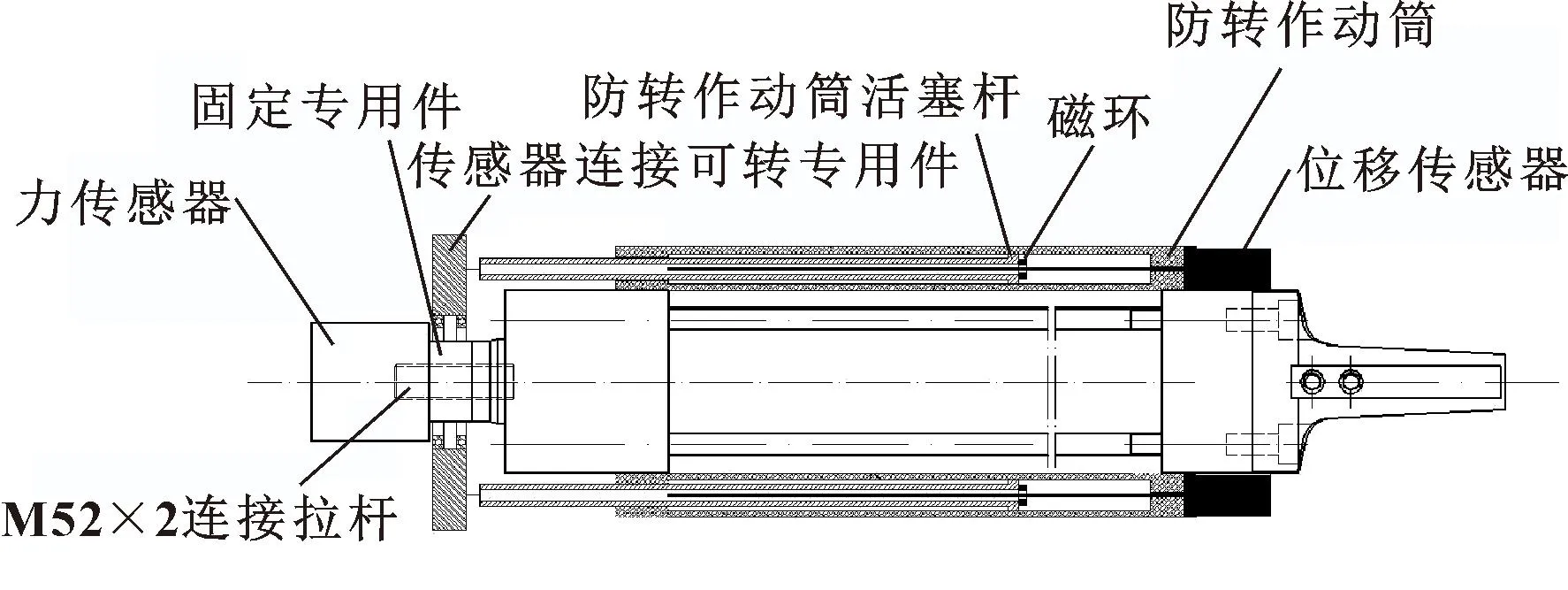
图2 位控作动缸的结构
伺服液压作动缸位控经改造设计后,具有冗余功能,保证一路位移信号用于闭环位移控制的同时,另外一路位移信号用于位移监视及位控备份,使用过程中对两路位移信号进行对比监视,降低单路位移反馈失真导致的位控加载风险,提高设备的可靠性。此外,防转组件防止液压作动缸在加载过程中因其推力杆转动影响位移测量装置,增加大行程位控作动缸位控加载的稳定性。
飞机起落架位置的相对刚度和强度较大,在飞机的前、主起落架假轮处分别设置吊点。吊点通过专用工装延伸至机身或机翼以外,与提升设备连接。飞机起落架假轮、提升横梁与支持夹具框架通过螺栓固定,双位控液压作动缸通过杠杆及连接件在提升横梁两端连接,形成双位控作动缸提升回路,通过控制系统同步控制2个液压作动缸进行飞机的升降。
设计可人工提升的手动葫芦机械保护回路,作为保护装置可避免控制系统或位控提升回路故障导致的飞机突然坠落,必要时能单独依靠人工完成飞机姿态调整。在双位控液压作动缸提升过程中,由试验人员操作手动葫芦,跟随位控提升回路同步升降。提升回路安装示意如图3所示。

图3 提升回路安装示意
2.2 全浮动支持平台
在全机结构强度试验中,起落架作为试验支持的主要约束部位,起落架约束和试验加载状态的转换需要对飞机姿态进行频繁调整,但起落架附近作业空间狭小,存在干涉等问题[6]。目前国内采用的撬杠-立柱式起落架加载和支持形式难以满足试验快速换装及姿态调整的要求,也无法保证大型飞机双轮高支柱起落架大变形后载荷的精确施加,故需研发新的支持加载方式[7-9]。
根据大型飞机多轮高支柱起落架的结构特点,设计全新的地面支持与加载装置,其结构包括上框、滚珠层及升降平台等三部分。3个起落架支持均采用平面对接方式,支持平台设计扁平加载随动结构,降低随动部位高度,提高系统稳定性;支持装置上框与升降平台的滚珠层采用面与面接触的设计理念;平面随动结构采用平面阵列滚动轴承,降低随动摩擦力。3个起落架垂向支持形成全浮动支持平台,可实现飞机姿态调整快速安装和支持/加载随动调节[10]。全浮动支持装置结构如图4所示。
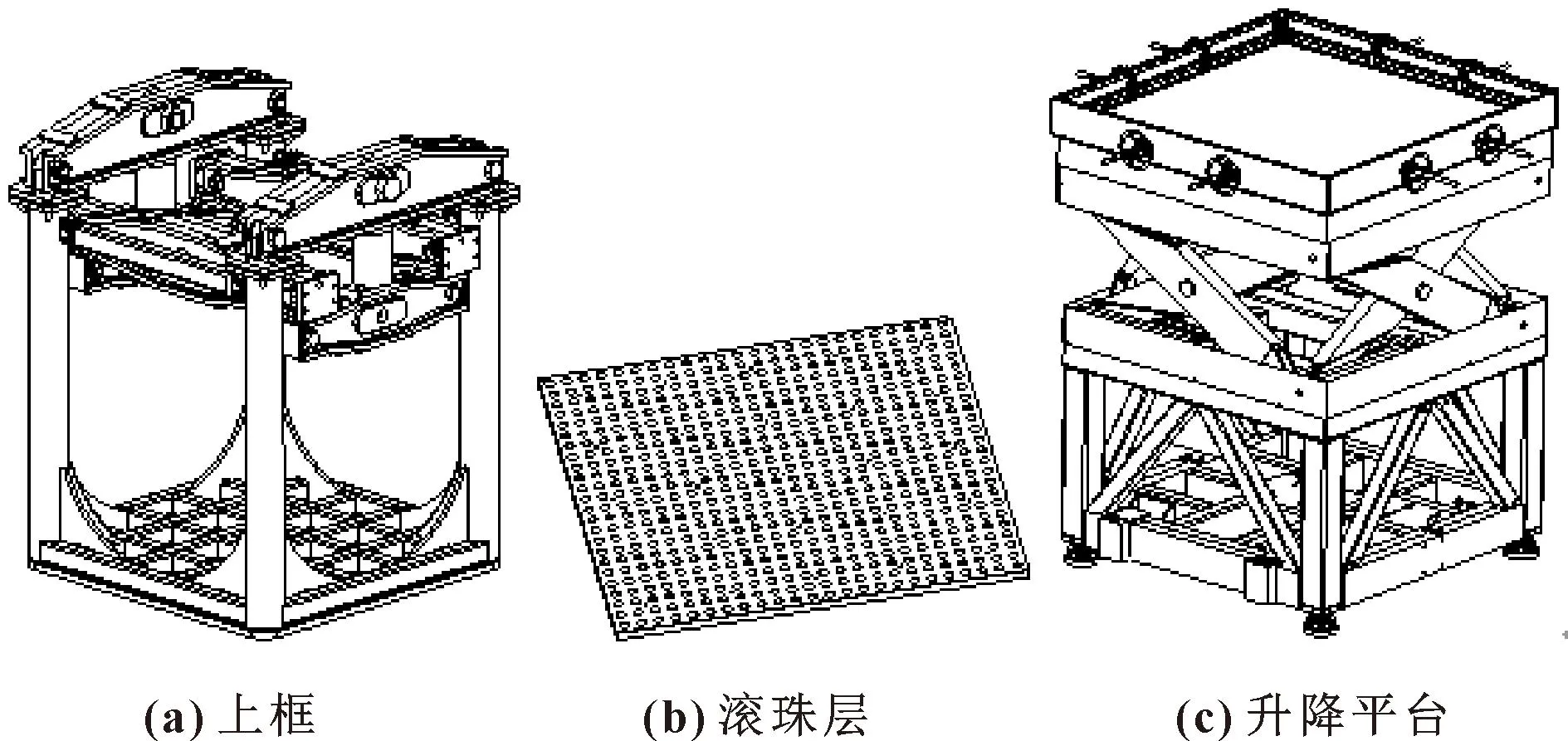
图4 全浮动支持装置结构
3 多点协调的飞机姿态控制
试验加载控制设备使用协调加载控制系统,其控制原理如图5所示。主控计算机按照试验载荷谱对加载控制系统发出指令,加载控制系统驱动液压伺服系统,并结合传感器(力/位移)反馈信号对试验件进行协调加载[11]。控制系统可满足各加载点协调加载,加载点动态加载误差(动踏步)及静态加载误差(静踏步)可根据加载点最大载荷进行设置。在加载过程中,若加载点位移误差超出动踏步设定的误差带,加载速率减慢,若加载点误差在载荷谱端点时不在静踏步设定的误差带内,加载点的命令将会保持当前值,直到其端点误差到达误差带之内,方可继续进行加载[12]。

图5 协调加载控制原理
多点协调的飞机姿态控制方案如图6所示。包括3种类型的控制通道,具体为:(1)主控通道。用于控制液压位控作动缸的位移提升,位移主控通道设置合适的闭环控制参数、动/静踏步参数及误差限,保证位移加载的跟随性、协调性和安全性;(2)监视通道。位控作动缸冗余设计的位移传感器可用于位移监视及位控备份,液压作动缸的负载端连接测力传感器,用于各吊点重力监视;(3)计算通道。用于将多路反馈进行数学运算得到计算反馈,位移计算通道是对同一吊点中同一个位控作动缸的位控通道反馈和位移监视通道反馈进行对比监视,保证位控作动缸位移反馈的正确性,力计算通道是对同一吊点的2个作动缸的力反馈进行对比监视,保证吊点两端载荷的平稳性。

图6 飞机提升控制方案
通过对控制通道的反馈及加载误差设置上下限定值,对超限及超差设置触发动作,根据协调加载控制方案设置分级保护机制:主控通道及监视通道超限则触发控制系统互锁,液压系统卸压;主控通道超差或踏步则触发控制系统保持,停止执行载荷谱,液压系统不卸压;监视通道或计算通道超限,则触发控制系统保持,停止执行载荷谱,液压系统不卸压。
4 飞机姿态可视化监控系统
大型飞机姿态动态变化过程中,飞机与复杂试验系统干涉、碰撞风险高,对综合反映飞机姿态变化的角度、位移、载荷等信息实时测算及监控至关重要。常规的强度试验姿态监控手段只局限于录像、吊点载荷及约束点支反力,对飞机提升过程中的飞机姿态缺乏相对全面的监控手段。通过开发可视化监控系统,对飞机姿态相关的多维信息(高度、滚转角、俯仰角)进行实时监控,监控系统根据监控数据实时更新驱动三维空间显示模型的姿态,进而实现飞机姿态的三维姿态实时显示与监控。
4.1 位移及角度测算
在飞机机头、机尾、左右两侧机翼及机身中部布置位移测量点,具体实施方案见图7。其中机头1号点和机尾3号点测量垂向和侧向位移,机翼4号点和5号点测量垂向和航向位移,机身3号点只测量垂向位移,飞机提升高度、滚转角及俯仰角由以上位移测量值在测量软件中实时解算。

图7 测量实施方案
目前国内外对目标姿态测量有接触和非接触式[13-14],由于试验视场多因素干涉影响且非接触式测量解算复杂,因此在结构强度试验中,主要采用拉线式电流型位移传感器进行接触式位移测量[15]。文中通过在地面上摆放拉线式位移传感器,以投影法原理间接测量每个测量点的位移。
投影法测量原理如图8所示,在地面沿测量的方向(侧向或航向)上布置的2个位移传感器M、N,传感器测量值分别记为s1、s2,其中初始安装位置的3个距离a、b、c可通过激光测距仪获得。当被测点P变形至点P′时,P在MN上的投影由Q移动至Q′,根据几何关系及余弦定理可得出P在MN方向上的位移量PMN:
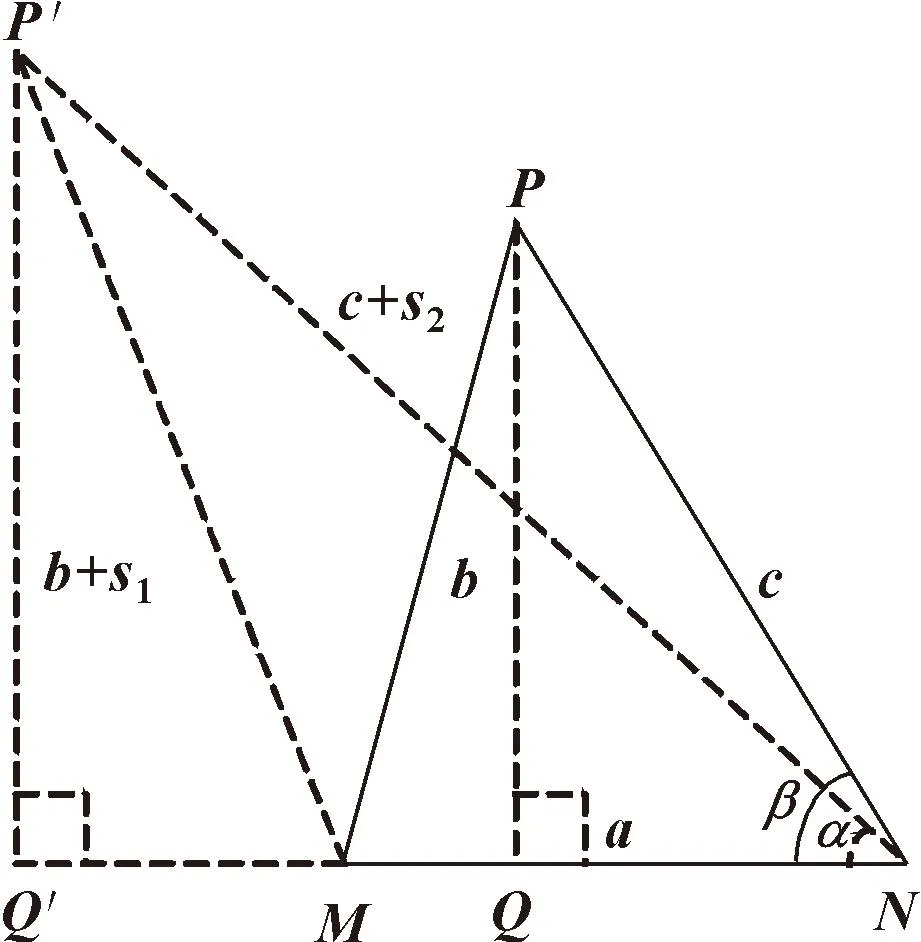
图8 投影法测量原理
PMN=|NQ|-|NQ′|=c×cosβ-(c+s2)×
(1)
由式(1)可知,初始安装距离a、b、c确定且不变,P仅s1、s2与有关,且不受其他方向变形影响[16]。
空间被测点P、P′分别与位移传感器M、N组成的三角形半周长为
d=1/2(a+b+c),d′=1/2(a+b+s1+c+s2)
(2)
由海伦公式可得,2个三角形的面积为
(3)
因此,在垂直方向上的位移变化量为
P⊥=2S′/a-2S/a=2/a(S′-S)
(4)
以飞机水平构造线为纵向基准,以飞机左右主起落架连线为横向基准,通过飞机机头和机尾的垂向位移实时解算飞机俯仰角,通过飞机左右翼尖的垂向位移解算飞机滚转角。
4.2 三维姿态实时显示
在CATIA软件中建立飞机及承载框架的三维模型,将飞机姿态相关信息(高度、俯仰角、滚转角)测量和计算方法编程写入测量设备,由监控系统实时读取测量设备数据,监控系统根据传感器数据更新驱动显示模型更新,监测信息窗口显示监测点位移变化、飞机俯仰角和滚转角,各监控信息设置上下限定值,监控数据发生异常情况时则系统报警,实现飞机姿态的多维变量实时监控及可视化。飞机提升过程中的姿态监控系统界面如图9所示。

图9 飞机姿态监控系统界面
5 验证与应用
5.1 测试验证
为了验证文中方法的合理性,设计模拟试验,采用横梁模拟飞机结构及质量,质量略大于飞机质量。根据飞机质量分布及理论载荷,在保证一定安全系数的前提下选择相应的吊具,具体信息见表1。先对液压作动缸的响应速度及全行程位控加载的跟随性进行测试,调整液压伺服阀的阀偏及PID等控制参数,保证位控加载过程响应迅速且跟随性良好。液压位控作动缸的卸载流量阀调整为常闭状态,保证位控作动缸的拉、压两腔油压在卸压瞬间不发生变化,即位控作动缸保持在当前位置不动。为实现自动加载,需建立试验载荷谱,载荷谱的参数具体包括加载波形、加载速度、加载步长及加载时间等[17]。
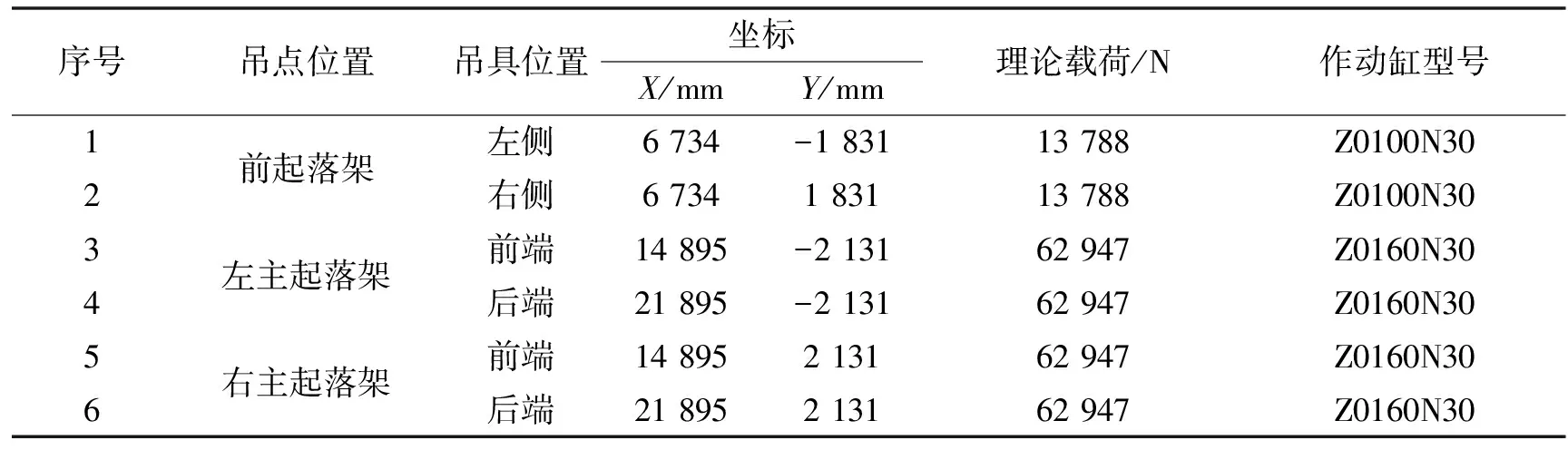
表1 吊点设置及吊具使用信息
在飞机结构强度试验中,一般均选择正弦波(Sine)函数作为加载波形[1],在加载指令发出的初始阶段及达到末端时间段,加载指令平缓变化,不易引起过冲及振动且便于控制器进行调整[18]。但飞机提升的最佳状态是连续缓慢提升和降落,若在每一级加载级数之间进行频繁调整,则会导致飞机提升速度频繁地突然变化,不利于大型飞机姿态的平稳转换。经研究测试,斜波(Ramp)更适用于飞机位控提升,正弦波和斜波加载曲线对比效果如图10所示。
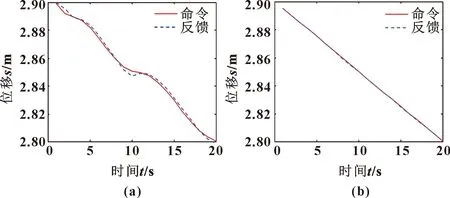
图10 正弦波(a)和斜波(b)加载曲线对比
如图10所示,以前起落架吊点的左侧位控作动缸为例,模拟试验件在向上提升100 mm的过程中,以斜波为加载波形的加载过程跟随性更好,加载误差明显较小,加载效果优于正弦波形,因此,此次飞机提升选择斜波函数作为位控加载波形。
以斜波函数作为加载波形,加载开始和停止阶段的端点值误差与加载速度有关。对加载速度进行测试,不同速度下的测试结果如表2所示。
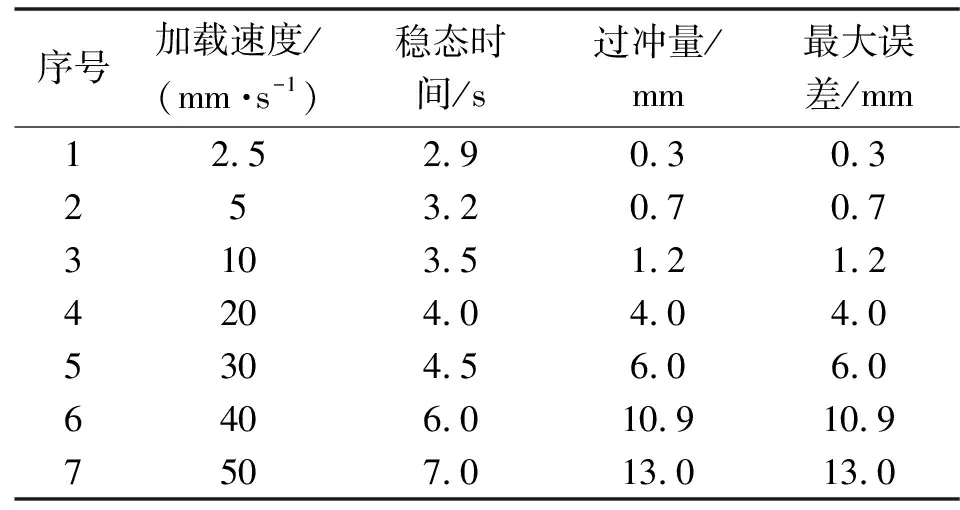
表2 加载速率测试结果
由表2可知:随着加载速度的增加,加载过程的稳态时间逐渐加长,最大跟随误差会逐渐增大,且最大误差发生在过冲位置。为保证加载精度,综合考虑飞机姿态转换过程的实施效率和安全性,飞机提升至最高位置过程中,速度设置为5 mm/s,选择加载步长为50 mm,飞机降落至支持平台过程中,速度设置为2.5 mm/s,选择加载步长为10 mm。控制系统可连续执行载荷谱,也可单波段分步执行。提升过程可选择在载荷谱的任一载荷行端点处或中间转换过程的任意时刻停止。
经充分验证后,协调加载控制系统主要参数设置为:(1)动态误差为5‰FS(FS为位移传感器满量程3 m)、静态误差为2‰FS;(2)外环误差带设为10‰FS;(3)前提升点力监视通道上下限设置理论载荷±2 000 N,主提升点力监视通道上下限设置为理论载荷±4 000 N,位控作动缸双位移计算通道的误差上下限设置为±5 mm。
针对提升过程可能出现的风险和故障进行充分识别,制定相应的保护措施,并进行验证,具体包括:(1)冗余控制验证:位控作动缸位移主反馈出现故障,则迅速切换监视通道为主控通道;(2)异常卸压验证:控制系统出现异常保护卸压时,位控作动缸在悬挂模拟试验件长时间内,各吊点位控作动缸的活塞杆保持卸压位置不动,保证试验机在控制系统异常保护的情况下,空中停放安全;(3)提升系统故障导致无法使用处理措施:姿态转换过程中,位控作动缸及控制系统出现故障无法使用,对手动葫芦提升方案进行演练,保证试验机安全。
5.2 应用分析
将文中方法应用于某飞机全机静力试验,飞机的提升及支持夹具安装实施现场如图11所示。

图11 飞机提升及支持夹具安装实施现场
液压位控作动缸连接飞机各个吊点,在协调加载控制系统的作用下,按照载荷谱以5 mm/s的速度,每级提升50 mm,逐级提升至2 700 mm高度,机械回路实时跟随位控提升点。飞机达到2 700 mm高度后保持不动,待前、主起垂向支持夹具到位后,逐级降低飞机高度,在3个上框与支持平台距离小于100 mm时,降落速度降至2.5 mm/s,每级降落10 mm,直至3个起落架上框底面均与支持平台表面贴合,完成飞机质量转移。安装侧向、航向约束,通过前主起垂向约束调整飞机水平面高度和俯仰,通过左右主起航向约束调整飞机航向位置和偏航,通过侧向约束调整飞机侧向位置,通过左右主起垂向约束调整飞机滚转,重复调整直至飞机姿态符合静力试验要求。
在飞机姿态转换的过程中,通过开发的可视化监控系统,采用飞机三维姿态测算与显示技术,全程监控飞机俯仰角、滚转角以及力反馈并实时显示在现场大屏幕中,辅助试验指挥人员全方位实时了解飞机姿态变化情况。飞机姿态显示与监控系统界面如图12所示。
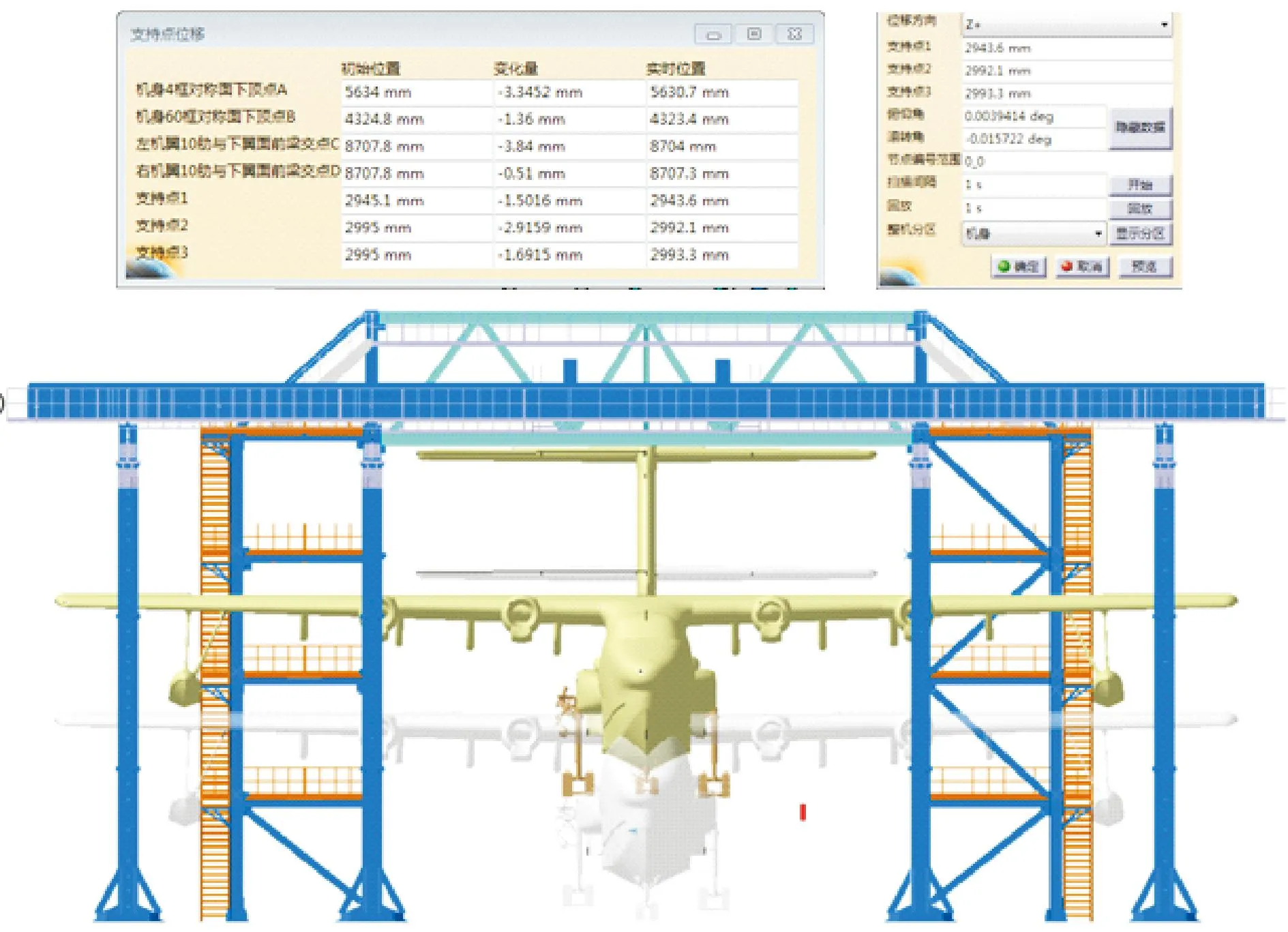
图12 飞机姿态显示与监控
飞机提升过程中,最大滚转角为0.08°,最大俯仰角为0.15°。以左主起落架前端吊点为例,提升过程位移加载命令-反馈曲线、加载误差曲线、力反馈监视曲线如图13所示。吊点位移加载跟随性良好,最大位移加载误差为6.5 mm,吊点的力反馈波动较小,一直在静态反馈的±2 000 N范围以内。总之,在飞机提升与降落过程中,其姿态始终平稳、安全、可控,达到了预期的效果。

图13 前起落架前端吊点提升过程监视曲线
采用文中的大型飞机姿态装换与控制技术,该飞机静力试验机安全、高效地完成了姿态转换,历时仅1.5 h,其实施效率较传统方法提高了约35%,可靠性及安全性大幅提升。
6 结论
针对大型飞机传统提升方式中存在的胶布带脱落、局部失稳以及多种提升设备间不协调等风险问题,提出了一种大型飞机结构强度试验姿态转换与控制方法。设计了基于位移提升装置和全浮动支持平台的大型飞机姿态转换辅助系统,结合协调加载控制系统,提出了基于多点协调的位移提升控制方案,实现了飞机姿态的平稳转换和精准控制。通过研究飞机姿态实时测量算法,开发可视化监控系统,实现了飞机姿态转换过程的多维变量实时监控。文中方法有效地保证了某飞机全机静力试验飞机提升与支持夹具安装过程安全、高效且精准控制,极大地提高了试验机的安全性,实施效率提升35%以上。
文中方法具有很强的推广价值,特别是大尺寸重型飞机的姿态转换与控制,有助于提高大型飞机结构强度试验姿态转换的实施效率和可靠性。
