矿用带式输送机恒功率调速控制策略研究*
2024-03-07李兰
李 兰
(黑龙江科技大学 电气控制工程学院,黑龙江 哈尔滨 150022)
0 引 言
矿用带式输送机是煤矿井下主要的连续化运输设备,随着运行阻力和总装功率的大幅增加,其在煤矿井下的功率消耗也急剧增加,因此研究带式输送机的节能策略具有重要意义。在载煤量较高时,电机的有功做工较大,实际的功率因数较高;在载煤量较低时,电机的有功做工较小,实际的功率因数较低,电能浪费较大,煤矿的生产成本增加。因此,急需找到一种矿用带式输送机的智能调速方法,以实时检测载煤量并动态调节输送机的带速。为减少电能浪费、提高电机的功率因数,笔者提出了矿用带式输送机恒功率智能调速策略,对带式输送机的带速进行智能调速,以此降低矿用带式输送机的能耗,提升煤矿的经济效益。查阅文献[1]、[2]可知,影响矿用带式输送机运输功率的因素为载煤量和输送机的带速,这三个量之间的关系比较复杂,难以建立精确的数学模型,故笔者采用模糊控制调节带式输送机的带速,此方法不但可以有较好的控制精度,还可以有更高的鲁棒性。
1 矿用带式输送机恒功率智能调速原理及调速系统
矿用带式输送机恒功率调速指的是当输送带上发生轻载时,通过调节带式输送机的带速和给煤机的给煤速度,实现多煤快转、少煤慢转,从而达到带式输送机运输功率的恒定[3]。
智能调速系统由变频器传输、逻辑控制、传感器采集三大模块组成[4]。通过变频器控制驱动电机的转速,从而调节带式输送机的带速;逻辑控制功能由可编程逻辑控制器(Programmable Logic Controller,PLC)实现,它可以将传感器收集到的模拟量转化为数字量,从而实现分析控制;速度传感器和超声波传感器负责实时的数据采集工作,并将采集到的数据传输给PLC;通过多功能智能仪表PDM采集电压、频率和功率因数,根据仪表获悉带式输送机的瞬时功耗。在载荷量过低时,可通过PLC调高给煤速度,提高载煤量。调速系统根据瞬时煤炭载荷量和带式输送机带速对功率进行合理调整。智能调速系统结构图如图1所示。
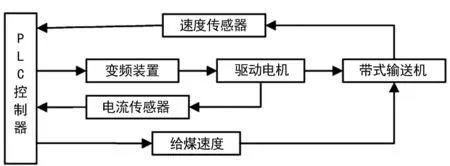
图1 智能调速系统结构图
2 使用模糊控制调节带速
带式输送机在额定负载运行时,输送带的速度也为额定值。当输送带的煤流量变化时,若带速维持不变,输送带的载荷量将会发生变化,整个带式输送机的运行阻力也会发生改变,运输系统的消耗功率也会随之变化。通过分析可知,带式输送机的煤流量、带速和功率存在较为复杂的关系,而且在建立关系时摩擦阻力系数fi无法预测,无法通过准确的数学模型进行分析和控制。故文中利用模糊控制器建立带式输送机煤流量、带速和消耗功率的节能优化模型,对带式输送机的运行速度进行优化控制。
2.1 模糊控制系统结构
模糊控制是由操作经验、表达知识转换成的“模糊规则”,它可以实现人的某些智能,属于一种智能控制。
模糊控制系统的结构图如图2所示。模糊控制器主要包括输入量的模糊化、规则库、模糊推理、解模糊,其中最重要的是模糊推理。传感器采集的清晰量经过模糊化转换成模糊量,通过规则库完成模糊量的模糊推理,得到输出量的模糊值,模糊值再经过解模糊输出清晰量[5]。

图2 模糊系统结构图
2.2 设计模糊控制器
由于采集的带速信号是非线性和时滞的,为更好反映带速的动态特性,故选择二维模糊控制器结构。模糊控制器将带式输送机的实时带速V0与期望带速V1的偏差值和偏差值的变化率作为输入量 ,将变频器的控制信号作为模糊控制的输出值。
(1) 自然语言变量的确定
将速度偏差记为e,取其语言变量为E,因为煤流量的变化有可能比较大,故将E的论域分为7个等级,论域X={-3,-2,-1,0,1,2,3},模糊子集为{NB,NM,NS,ZO,PS,PM,PB},这些语言值分别表示偏差值为“极大”,“偏大”,“稍大”,“匹配”,“稍小”,“偏小”,“极小”。
偏差变化率记为ec,取其语言变量为EC,论域分为7个等级,模糊子集取7个。即论域Y={-3,-2,-1,0,1,2,3},模糊子集为{NB,NM,NS,ZO,PS,PM,PB},所对应的加速度为“快减速”,“减速”,“慢减速”,“匹配”,“慢加速”,“加速”,“快加速”。
变频器的控制信号为f,设其语言变量为F,为了达到较好的控制效果,可以将论域分为7个等级,论域Z={-3,-2,-1,0,1,2,3},模糊子集为{NB,NM,NS,ZO,PS,PM,PB},其所对应的电动机的转速分别表征为“带速过低,转速增量为大”、“带速很低,转速增量为中”、“带速稍低,转速增量为小”、“带速匹配,转速增量为零”,“带速稍高,转速减小量为小”,“带速很高,转速减小量为中”,“带速过高,转速减小量为大”。
(2) 确定隶属函数和隶属度赋值表
对自然语言进行模糊化处理,需要用到隶属函数,文中选择三角形函数作为隶属函数。图3(a)、(b)、(c)分别对应了e、ec和f的隶属函数。
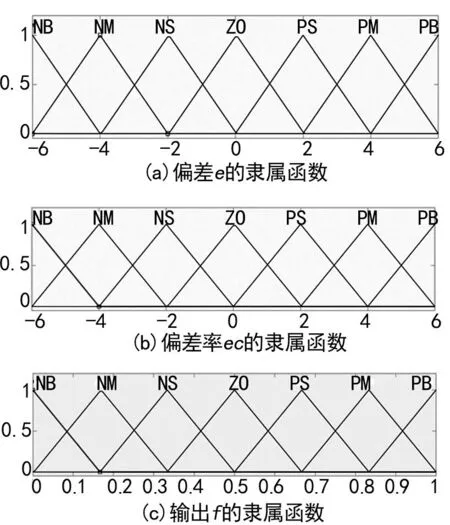
图3 隶属函数
(3) 确立模糊规则表
确立模糊规则时需根据误差的大小来分类考虑,误差较小时,调节不可过大,应避免过度调节;误差较大时,模糊规则调节的目标就是要减小模糊误差。根据煤矿现场情况以及节能控制要求,确立如表1所列的模糊控制规则表[6]。

表1 模糊控制规则表
模糊控制规则的三维关系图如图4所示。

图4 模糊控制规则三维关系图
模糊规则确立后,采用Mamdani型算法进行模糊推理,得到控制量F的模糊子集;接下来利用重心法进行解模糊,就可得到清晰的控制输出量f。
3 方案实现
矿用带式输送机速度调节流程如图5所示,在输送机上安装速度传感器采集实时的带速V0,然后将电子皮带秤采集到的载煤量Q传递给上位机,并且匹配期望带速V1。将带速的偏差值e和偏差值的变化率ec输入模糊控制器 ,通过分析计算出变频器的控制信号f,变频器将以此为信号调节电动机的频率,调节带式输送机的带速。

图5 矿用带式输送机带速调节流程
在进行带速调节的同时,也要考虑输送带的带宽和带强,避免撒料和输送带损坏,故需设置最大运行速度Vmax和最低带速Vmin,规定带式输送机的带速只能在这个范围内调节,否则报警停机。根据煤流量调节带式输送机带速的流程如图6所示。
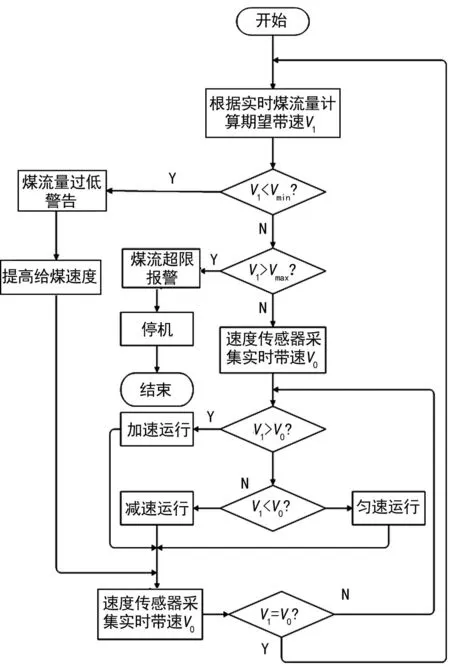
图6 带速调节流程图
3.1 驱动系统建模
矿用带式输送机运输系统主要包括纯滞后环节和驱动系统两部分,其主要由电动机系统部分、变频器控制部分和输送带的纯滞后环节组成[4]。
设矿用带式输送机系统的传递函数为:
G(s)=G1G2G3G4
(1)
式中:G1为变频器的传递函数,G1=1/(s+5);G2为电动机转动传递函数,G2=1/s;G3为电动机电磁传递函数,G3=1/(s+1);G4为输送带的纯滞后函数,G4=e-2s。
故矿用带式输送机系统的传递函数为:
(2)
3.2 模糊控制器的仿真
根据2.2节选定的隶属函数完成模糊控制器的仿真设计,结果如图7所示。将其命名为fuzzyxin.fis,通过模糊编辑器的To Workspace工具将其发送到Matlab的工作空间中,准备后续的调用。

图7 模糊控制器
3.3 模糊控制系统仿真
采用Matlab/Simulink模块进行数学建模,建立模糊控制系统仿真模型。双击打开fuzzy logic controller模块里输入fis文件名,完成模糊控制的调用。矿用带式输送机控制系统模糊控制仿真模型如图8所示。
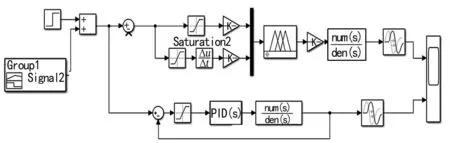
图8 模糊控制系统仿真
将PID控制与模糊控制进行仿真模拟测试,仿真时间30 s,仿真结果如图9所示。
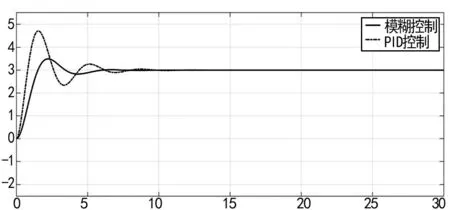
图9 仿真结果图
由图9可知,PID控制系统的超调量较大,容易造成驱动电机故障,而模糊控制系统基本无超调,大大降低了驱动电机的故障概率。
在15 s时对系统加入扰动信号,响应曲线如图10所示。由图10可知,PID控制在扰动发生后产生了较大的超调量,而模糊控制只有很小的超调量,故模糊控制比PID控制的稳定性更好,更适合带式输送机的实际工作环境。

图10 扰动响应曲线
4 结 语
文中提出的矿用带式输送机恒功率智能调速策略,可智能调节带式输送机带速,改变输送带上的物料填充率,实现矿用带式输送机的恒功率智调速。以PLC为控制主机,设计模糊控制器,使带式输送机的带速可根据煤流量的大小智能调节。利用Matlab软件进行仿真模拟,验证了模糊控制的稳定性和可靠性,验证了调速策略的可行性。带式输送机恒功率智能调速策略使输送机平稳、高效、节能运行,减少电能消耗和机械磨损,延长输送机使用寿命,可为煤矿带来巨大的经济效益。