堤岸草地护理机械斜坡稳定性仿真分析*
2024-03-07常知民吴群彪顾志豪朱倚剑胡逸飞
常知民,吴群彪,杨 琪,顾志豪,朱倚剑,胡逸飞
(江苏科技大学 苏州理工学院,江苏 张家港 215600)
0 引 言
堤岸是水陆交错的过渡地带,具有显著的边缘效应。在自然状态下,堤岸具有丰富的植被,这些植被构成了河岸缓冲带生态系统的核心,具有拦蓄泥沙、泻洪、排涝、航运等重要的生态功能。我国草地面积约400万km2,其中堤岸草地约占10%。然而,在当今社会,许多草坪由于没有良好的养护维修方案而出现草坪环境恶化、垃圾遍地等问题。目前国内对于堤岸草地的保护与修理主要还是依靠人工来操作,人们在修复土地的时候,遍地丛生的杂草和随处可见的垃圾都是必须要清理的,同时施肥也是提高土地质量的必要措施[1]。
目前,国内的除草机大都为中耕除草机[2],工作部件多为单翼铲或者双翼铲,除此之外也有圆盘式的除草机[3],但是数量较少。而国内还没有比较成熟的滚切式除草机械因此对于滚切式工作部件,还是一片空白。为此,笔者设计了一款集多功能于一体的堤岸草地护理机械,该机械可通过远程控制降低工作的危险性,同时其功能一体化特性还能使工作效率得到大幅度提高。
由于装置的运行环境主要为堤岸斜坡,因此为了对装置在斜坡上的运行情况进行模拟,笔者利用仿真软件ADAMS进行整车的虚拟样机模拟运行,并通过仿真分析,验证小车爬坡的稳定性[4-5]。
1 主要结构与工作原理
1.1 主要结构组成
堤岸草地护理机械结构主要由垃圾回收模块、除草模块、施肥模块、重心转移模块以及远程驱动模块五个部分组成。堤岸草地护理机械整体装置结构图如图1所示[6-7]。

图1 堤岸草地护理机械结构图
1.2 原理及工作过程
堤岸草地护理机械通过电机实现四轮驱动,通过差速实现整个小车的转向,其工作流程如图2所示。
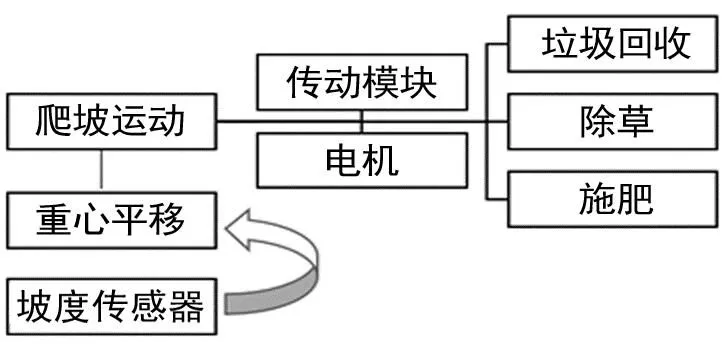
图2 工作流程图
首先,垃圾回收模块中的风机旋转使得吸管内空气流动产生吸力从而吸取垃圾。其次,在中心处设有传动链,中心处的电机通过传动链将动力传递至除草刀片和垃圾回收机构的风扇,使得只需一个电机就可以实现两个工作过程,简化了控制电路。施肥模块由槽轮和肥料桶组成,通过一对齿轮副和轴将车轮动力传递至槽轮,车轮每旋转1圈槽轮旋转4圈,从而实现施肥量的控制。
最后,考虑到小车的运行环境大多为草地及斜坡,为保证车辆运动稳定性,采用大型橡胶车轮并配置重心转移模块,该模块由电机、丝杠、重物和坡度传感器构成。在不同坡度时,由坡度传感器发出指令,控制步进电机的转动圈数,通过丝杠的旋转带动重物移动,进而控制重心平移的距离,实现重心的水平移动,并可防止侧翻。
2 重心平移模块结构设计
考虑到堤岸护理机械的工作环境主要为斜坡,为防止机械发生侧翻,给机械添加了重心平移模块,如图3所示。

图3 重心平移模块
该模块主要由步进电机、滚珠丝杠、轴承座以及重物组成。重心转移模块主要分布在车体的两侧,步进电机与丝杠通过联轴器相连接,通过步进电机的旋转带动丝杠转动,进而带动重物的平移从而实现整体装置重心的水平移动。通过对步进电机的控制实现对于重心位置的控制,使小车在上坡与下坡时的重心位置发生改变,达到防止小车翻车的功能。
3 ADAMS运动学仿真分析
ADAMS软件使用交互式图形环境和零件库、约束库、力库,它可以创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法建立系统动力学方程,并可以对虚拟机械系统进行静力学、运动学和动力学分析,从而输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及有限元的输入载荷计算等[8]。文中利用仿真软件ADAMS进行虚拟样机的仿真实验,通过ADAMS/view将建模后的三维模型导入其中进行仿真运行,再通过观察特定位置的运动曲线来分析其运动的稳定性。
3.1 零件的材料定义
整体装置的重量以及质心位置都会对装置的爬坡稳定性以及最大爬坡角度产生影响。因此首先对整体装置的材料以及质量密度进行定义。将整体车身描述为45钢,四个轮胎所用材料设置为橡胶,通过查阅资料确定橡胶轮胎与草地的动摩擦系数为1.8~2.0。将软件中库仑力动摩擦系数设定为1.9。
小车各部件的接触关系为:四个轮子和车身的接触为转动铰链连接,橡胶车轮与坡道的接触为solid-to-solid类型,其中车轮与地面的接触刚度设置为1×108,力指数为2.2,橡胶轮胎与地面的阻尼为1×104,穿透深度为1×10-4。
3.2 仿真结果分析
在施加完约束与驱动后,选择仿真工具按钮,设置仿真时常End Time为5.0 s,仿真步数Steps为50步,仿真无错误,将坡度分为15°和30°并分别观察运行情况。
15°坡道的仿真运行图与质心速度、位移测量曲线如图4所示。

图4 仿真运行图
为体现车辆运行速度的稳定性变化,对装置的质心速度变化以及质心位置图进行分析,结果如图5所示。

图5 15°坡道质心速度位置图
图中实线是质心速度曲线图,虚线是质心位移曲线图;横坐标为时间,s,左侧纵坐标为速度,m/s,右侧纵坐标为位移,m。
由图5可知:装置在进行15°爬坡时,启动时会有一个较大的速度变化然后趋于稳定,实现坡道上顺利攀爬;同时,质心的位置变化也是随着装置在坡道上的运动而稳定上升。由图4与上述分析可知,装置在15°的坡道上可实现稳定运行。
然后是装置在30°坡道上的运行情况,与15°坡道相同,取质心速度、位移图做分析比较,结果如图6所示。

图6 30°坡道质心速度位移图
理论上,在进行30°坡道仿真时,给定一定的扭矩可以实现爬坡,但由于重心作用,在进行30°爬坡时,小车由于重心作用会产生侧翻(如图7所示),这时需将整体装置的重心前移,通过重心位置的改变,解决装置侧翻的问题。

图7 仿真运行图
此时,在装置的重心转移模块上,步进电机带动丝杠旋转使得重物移动而改变重心位置,如图8所示,通过装置的重心平移模块将装置的重心前移,使得整体装置重量前倾,并再次进行仿真测试。

图8 重心移动示意图
改变重心后,装置的质心移动曲线图如图9所示。分析曲线可知,在改变重心的位置后,装置可以一个较为稳定的速度进行爬坡,同时,质心位置的运动的曲线也以较为平稳的曲率上升,符合对于装置爬坡稳定性的初步预期。

图9 重心平移后的速度位移曲线图
同样,在下坡时,将装置的重心后移,可实现稳定下坡。
综上所述,通过不同角度的验证,在改变重心的情况下,最大爬坡角度可达35°,装置的运行较为稳定,满足该装置大部分的运行工况。
4 结 语
文章通过ADAMS的虚拟样机技术全面地分析了堤岸草地护理机械在运行时的运动学和动力学性能,以及重心位置对于整体堤岸草地护理机械的影响。利用ADAMS在运动学分析与图像结果显示等方面的优势,对堤岸草地护理机械的位置、速度、运动稳定性等相关输出曲线进行图像分析,更明确、更直观地对装置运行情况加以分析。从图像的分析可知,在添加了重心转移模块后,堤岸草地护理机械在实现攀爬角度更高的同时提升了运动的稳定性,解决了在最大爬坡角度处容易后翻的问题。整体装置运行稳定,可靠性高,符合预期要求。
该堤岸草地生态护理机械可应用于收集废弃的垃圾、清理杂草、喷洒肥料,适用于堤岸草地、园林和 公园,推广面积广泛。且该装置结构小型化,功能多元化,操作简单,维修方便,价格也相对低廉, 能满足广大劳动者的实际需求,减少了能源的消耗和尾气的排放,大大减少了劳动力成本,因此有很好的实用性与可行性。