仿象鼻机器人设计与实验*
2024-03-07蒋炜忠刘志洋白晓楠孙龙飞
蒋炜忠,韩 露,刘志洋,滕 菲,白晓楠,孙龙飞
(1.沈阳理工大学 机械工程学院,辽宁 沈阳 110159; 2.沈阳理工大学 信息科学与工程学院,辽宁 沈阳 110159)
0 引 言
连续体机器人是一种新型仿生机器人,它可以模仿自然界中象鼻、章鱼臂等动物器官的运动机理,其自身不存在离散关节,但能依靠连续柔性变形实现运动操作[1-2]。仿生连续体机器人是根据触手、象鼻、舌头等生物体特殊的器官设计出的无脊柱连续型机器人[3]。在抓取一些柔软的目标物体时,仿生连续体机器人比传统离散关节刚性连接机械手臂更加灵活,它不仅能够像传统机器人采用末端执行器实现抓取,还能够利用机器人本身的柔性弯曲包裹住目标物体,可减少机器抓取对物体的损伤[4]。
通过改变自身的外形,连续型机器人可以灵活地绕过各种障碍物,或穿过狭小弯曲的孔洞,非常适合非结构化环境和空间受限环境应用[5]。同时,在面对复杂环境时,仿生连续体机器人的灵活性可以避免其与复杂操作环境产生碰撞,具有很好的工程应用前景[6]。另外,研究者受自然界象鼻的启发,模仿它们的结构特征与运动机理,设计出具有生物体特征的仿生机器人,此机器人可以弥补传统机器人自由度少、避障能力不足、灵活性差等缺点[7]。
笔者提出一种采用绳索和SMA弹簧差动驱动的欠驱动、模块化的新型仿象鼻机器人。此机器人通过电流控制SMA弹簧等效刚度,配合绳索驱动实现对不同形状物体的包络抓取。首先,采用D-H法建立了仿象鼻机器人运动学模型,分析机器人工作空间。然后,基于记忆合金弹簧组的理论计算仿真得出仿象鼻机器人的多种弯曲变形效果。最后,通过原理样机制作和实验平台搭建对理论模型进行验证。
1 仿象鼻机器人结构设计
仿象鼻机器人由多模块串联而成,象鼻内侧的相邻模块间采用铰链连接,外侧设计为可开合形式。象鼻采用绳索提供牵引力。象鼻内侧设计了绳索导向孔,牵引绳索通过导向孔贯穿连接各级模块。象鼻外侧两模块之间并列安装普通拉伸弹簧和SMA弹簧,通过调整模块间弹簧的等效刚度使其产生与绳索对抗的拉力,使象鼻可以弯曲至多种角度。普通拉伸弹簧可以使模块之间在无外部负载作用下恢复至初始闭合状态。开口弹簧可以设计为普通弹簧与SMA弹簧组合使用,改变弹簧组的等效刚度,进而主动控制包络的曲率半径。
仿象鼻机器人三维结构如图1所示,采用模块化设计使机器人整体结构简单。单个模块长42 mm、宽42 mm、高55 mm,模块材料为9400树脂,模型由十个模块串联而成,仿象鼻机器人总长约470 mm。为了达到牢靠抓取物体而不使物体受损的目的,每个模块夹持面设置缓冲材料,缓冲材料竖直剖面为梯形,这样可以防止缓冲材料在相邻模块化关节转动到指定角度前提前相互接触。
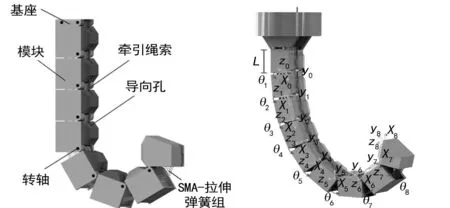
图1 仿象鼻机械手三维模型
仿象鼻机器人模块之间选用的SMA弹簧的材料为镍钛合金,丝径为0.6 mm,外径为4 mm,总长为10 mm。
2 运动学分析
工作空间是评价机器人性能的重要指标之一,工作空间可以根据每个关节的运动范围和连杆的长度进行确定。建立的仿象鼻机器人的坐标系如图2所示。在相邻模块转轴位置建立D-H坐标系{Oi},(i=0,1,2,…,8),得到相应系统的D-H参数表,如表1所列。

表1 象鼻机器人D-H参数表
所有转角都在x-y平面内绕z轴旋转,θ表示转动变量,顶部单元模块与基座固连,坐标系{O0}为固定坐标系,其余坐标系通过旋转θi后沿X轴平移L得到,两个相邻坐标系之间的变换矩阵为nTn+1。
nTn+1=
(1)
式中:S=sinθ,C=cosθ。
所有坐标系都是相对于当前的坐标系变换的,因此可得机器人基座与末端模块之间的总变换矩阵为:
0T8=0T11T22T33T44T55T66T77T8
(2)
其中S12、C12可表示为:
S12=S(θ1+θ2)=S1C2+C1S2
(3)
C12=C(θ1+θ2)=C1C2-S1S2
(4)
使用式(3)、(4)对结果简化,计算得到:
0T8=[Rot(z,θ)×Trans(L,0,0)]8
(5)
式中:PX=L×(C1+C12+C1~3+C1~4+C1~5+
C1~6+C1~7+C1~8);PY=L×(S1+S12+S1~3+
S1~4+S1~5+S1~6+S1~7+S1~8);PZ=0。
Cθ1~n和Sθ1~n为n个转轴余弦和正弦角的和,可以表示为:
Cθ1~n=cos(θ1+θ2+θ3+……+θn)
(6)
Sθ1~n=sin(θ1+θ2+θ3+……+θn)
(7)
根据正运动学方程,给定转角θ和连杆长度L值便可以求出空间当中末端相对于基座的位姿。在实际使用当中,为减少末端模块在卷曲时与其它模块发生交叉碰撞的次数,需限定张角运动范围,限定情况如表2所列。仿真得到象鼻机器人的工作空间如图3所示。
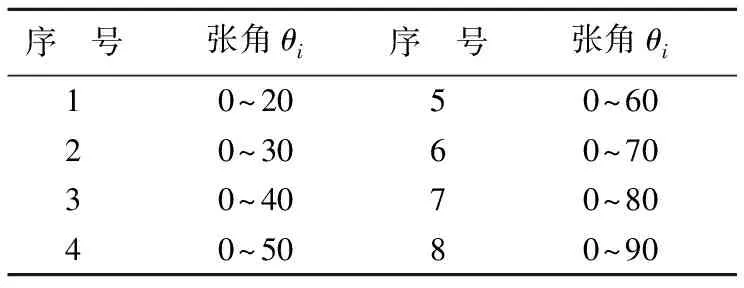
表2 张角运动范围 /(°)
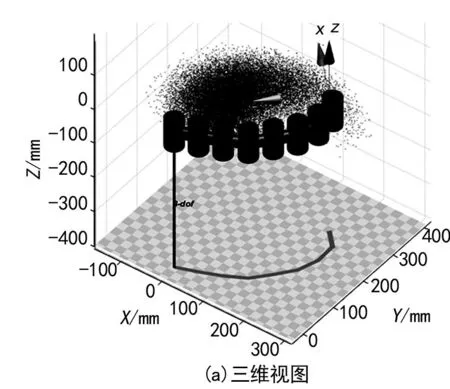
图3 象鼻机器人工作空间
3 实 验
为了验证仿象鼻机器人的运动学关系,设计搭建了仿象鼻机器人实验装置。实验系统由象鼻机器人样机、TD3020电源模块、上位机、ESP8266 NodeMCU-12F CH340开发板等构成。实验中,SMA弹簧在通电后发热,温度达到SMA丝的相变温度(文中所用SMA丝的相变温度为65 ℃)时,SMA弹簧会收缩。包络抓取实验如图4所示。

图4 象鼻机器人抓取实验
4 结 语
文中设计了一种由绳索和弹簧组联合驱动的象鼻机器人,机器人由模块单元串联形成,结构紧凑,重量轻,结构灵活性好,可以实现灵活弯曲运动。基于D-H法建立了仿象鼻机器人的正运动学模型,在正运动学基础上采用蒙特卡洛法得出仿象鼻机器人包络空间。并最终完成仿象鼻机器人实物样机的制作,验证了象鼻机器人的包络功能。此机器人在果蔬采摘、复杂物体抓取等领域有一定应用前景。