基于双反射镜的航空遥感成像系统实时视轴稳定技术研究
2020-12-03洪声艺王义坤韩贵丞蔡能斌亓洪兴
洪声艺,王义坤,韩贵丞,姚 波,蔡能斌,亓洪兴
(1.中国科学院上海技术物理研究所 空间主动光电技术重点实验室,上海 200083;2.中国科学院大学,北京 100049;3.上海纽钛测控技术有限公司,上海 201613;4.上海市现场物证重点实验室,上海 200083)
0 引 言
航空遥感成像在军事侦察、环境监测、自然灾害预报等领域的应用日益广泛。航空遥感垂直对地成像作业时,作为载体平台的飞机由于空中气流和自身发动机等因素的影响难以保持飞行姿态的平稳,造成安装在载机上的成像系统视轴在惯性空间晃动[1],导致视场偏移[2],增加了地物漏扫风险,降低了飞行作业效率,甚至会导致飞行作业失败。为了有效隔离载机姿态扰动对垂直对地成像的影响,保证成像系统视轴和视场在惯性空间的稳定,提高飞行作业效率,需要为航空遥感成像系统配置惯性稳定平台。
惯性稳定平台通常采用万向环架结构,安装在载机与航空遥感成像系统之间[2-9]。当载机产生姿态扰动时,平台控制系统控制万向环架带动成像系统反向实时补偿,隔离载机姿态扰动,实现成像系统视轴在惯性空间的稳定。北京航空航天大学和长春光学精密机械与物理研究所的相关学者都对惯性稳定平台做了大量研究。然而,目前采用万向环架的视轴稳定技术存在一些不足:惯性稳定平台与航空遥感成像系统分离,需单独配置;万向环架机械结构笨重复杂,转动惯量大,惯性延迟大,对姿态变化的反应慢,系统带宽小,控制难度较大。
文献[10-13]提出了一种实现航空遥感成像系统视轴在惯性空间俯仰方向稳定的新方法。成像载荷水平安装,在成像载荷前增加一个将光路折转90°实现垂直对地成像的45°反射镜。利用速率陀螺实时感测飞机的俯仰角速度ωp,根据平面镜成像的倍角关系和光路可逆原理,控制45°反射镜以ωp/2的角速度反向补偿,隔离载机俯仰姿态扰动,实现了成像系统视轴在惯性空间俯仰方向的稳定。
受此启发,考虑在对地成像的45°反射镜和成像载荷光路之间增设两个反射镜:远离成像载荷的固定反射镜相对于成像载荷静止不动,负责光路折转;靠近成像载荷的稳定反射镜可以绕平行于载机偏航轴的转轴转动,反向补偿隔离载机横滚姿态扰动。从光学成像的角度分析,稳定反射镜的转轴经过45°反射镜折转后的等效转轴平行于载机横滚轴。此方案在原理上能够实现成像系统视轴在惯性空间横滚方向的稳定。
与采用万向环架的传统视轴稳定技术相比,本文提出的基于双反射镜的实时视轴稳定技术,将视轴稳定功能直接复合在航空遥感成像系统中,基于对地成像的45°反射镜实现视轴在惯性空间俯仰方向的稳定,基于45°反射镜和成像载荷光路之间的稳定反射镜实现视轴在惯性空间横滚方向的稳定,无需额外配置稳定平台。这一技术的实现,不仅能简化机载遥感系统,节约成本,而且能减小稳定机构的转动惯量,大幅降低稳定控制难度。
1 基于成像系统双反射镜的实时视轴稳定原理
图1为复合视轴稳定功能的航空遥感成像系统示意图,成像系统由成像载荷、45°反射镜、固定反射镜和稳定反射镜组成。位置姿态测量系统(Position and Orientation System,POS)水平安装在与机体刚性连接的支撑环架上,用于实时感测载机的姿态扰动。对地成像的45°反射镜可以绕俯仰轴转动,反向补偿隔离俯仰姿态扰动,实现成像系统视轴在惯性空间俯仰方向的实时稳定,45°反射镜与支撑环架所在平面成45°夹角时定义为其零位。稳定反射镜可以绕平行于载机偏航轴的横滚稳定轴转动,反向补偿隔离横滚姿态扰动,实现成像系统视轴在惯性空间横滚方向的实时稳定。定义载机机体处于水平状态,45°反射镜处于零位且垂直对地成像时,稳定反射镜的位置为其零位,此时成像系统视轴对应物点为机下点A。

图1 复合视轴稳定功能的航空遥感成像系统示意图Fig.1 Airborne remote sensing imaging system including the function of LOS stabilization
1.1 惯性空间俯仰方向的实时视轴稳定原理
惯性空间俯仰方向的实时视轴稳定原理示意如图2所示。初始时刻,载机机体处于水平状态,45°反射镜处于零位,此时成像系统等效视轴为OAOA,对应物点为机下点A。未进行俯仰方向视轴稳定时,45°反射镜一直保持在零位且相对于成像载荷静止不动。当载机产生θ角的俯仰姿态扰动时,成像载荷及其等效视轴、45°反射镜及其零位均绕俯仰轴产生θ角的同步同向转动,此时成像系统等效视轴变为OBOB,对应物点由机下点A变为点B。显然,载机俯仰姿态扰动会导致成像系统视轴在惯性空间俯仰方向的晃动。

图2 惯性空间俯仰方向的实时视轴稳定原理示意图Fig.2 Principle of real-time LOS stabilization in pitching direction in inertial space
惯性空间俯仰方向的实时视轴稳定原理如下:初始时刻,45°反射镜处于零位。利用POS实时感测载机俯仰姿态扰动角θ,将等效视轴OBOB的OBO段作为45°反射镜的反射光线,OB段作为入射光线。根据光路的可逆性原理,控制45°反射镜绕俯仰轴反向转动θ/2角。由平面镜成像的倍角关系可知,入射光线将随之由OB段反向转动θ角到OA段,从而保证成像系统等效视轴始终稳定在OBOA,使稳定后的等效视轴对应物点始终为机下点A,实现惯性空间俯仰方向的实时视轴稳定。
1.2 惯性空间横滚方向的实时视轴稳定原理
初始时刻,载机机体处于水平状态,稳定反射镜处于零位,此时成像系统视轴为OAO2O1OA,对应物点为机下点A。未进行横滚方向视轴稳定时,稳定反射镜一直保持在零位且相对于成像载荷静止不动。当载机产生γ角的横滚姿态扰动时,如图3所示,成像系统视轴OA段绕横滚轴产生γ角的同步同向转动,视轴变为OAO2O1OC,对应物点由机下点A变为点C,显然,载机横滚姿态扰动会导致成像系统视轴在惯性空间横滚方向的晃动。
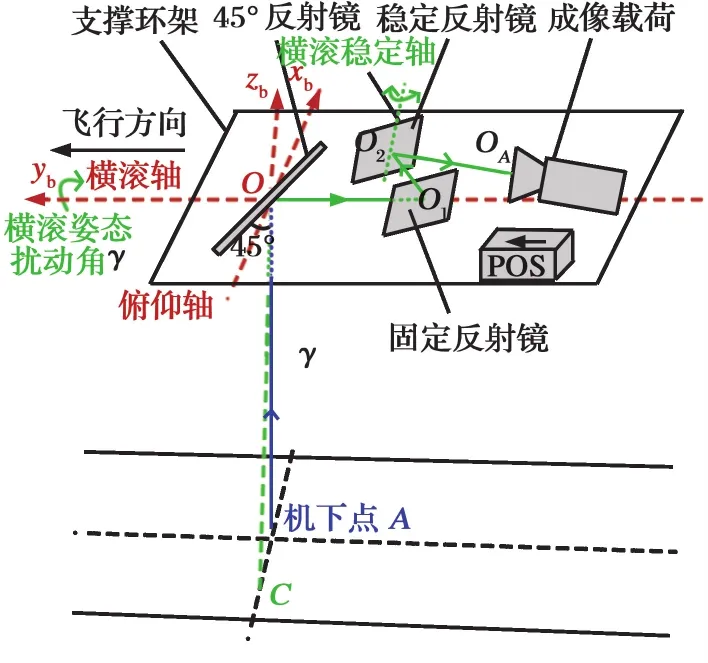
图3 载机横滚姿态扰动对成像系统视轴的影响Fig.3 Influence of roll attitude disturbance to LOS of the imaging system


图4 惯性空间横滚方向的实时视轴稳定原理等效示意图Fig.4 Equivalence principle of real-time LOS stabilization in rolling direction in inertial space
2 基于成像系统双反射镜的实时视轴稳定实现
2.1 基于成像系统双反射镜的实时视轴稳定实现方案
图5为实验室内搭建的载机飞行模拟试验系统,用来验证基于成像系统双反射镜的实时视轴稳定效果。将航空遥感成像系统放置在六自由度运动平台上,运动平台绕其三个轴的转动用于模拟载机姿态扰动,大反射镜绕自身镜面内平行于航空遥感成像系统俯仰轴的转轴转动,用于模拟载机飞行并实现室内对外成像,其中镜面轴向对应翼展方向,成像视场的竖直方向对应载机飞行方向。系统的部分技术指标如表1所示。

图5 基于成像系统双反射镜的实时视轴稳定室内飞行模拟试验系统Fig.5 Flight simulator test system to verify real-time LOS stabilization based on dual reflectors in the imaging system in the laboratory

表1 飞行模拟试验系统部分技术指标Table 1 Part of Technical specifications of the flight simulator test system
本文提出的基于双反射镜的航空遥感成像系统实时视轴稳定技术对位置控制要求较高,故采用控制领域经典的位置-速度-电流三环PID控制算法[14],实现实时视轴稳定的精确位置控制,如图6所示。采用动态响应快、定位精度高的音圈电机[15]带动45°反射镜或稳定反射镜反向转动补偿,实现惯性空间俯仰方向和横滚方向的实时视轴稳定。

图6 基于双反射镜的实时视轴稳定控制框图Fig.6 Diagram of real-time LOS stabilization control based on dual reflectors in the imaging system
基于双反射镜的航空遥感成像系统实时视轴稳定实现过程为
(1) 上电初始化时,45°反射镜和稳定反射镜均处在零位;
(2) 以输出分辨率为0.001°的POS作为测量基准,实时感测载机的俯仰姿态扰动角θ和横滚姿态扰动角γ;
(3) 由于45°反射镜的零位已随俯仰姿态扰动产生θ角的同步同向转动,所以,将-θ/2作为音圈电机1的位置环PID命令输入,控制45°反射镜绕俯仰轴反向转动到-θ/2角位置,实现反向转动θ/2角;
(4) 由于稳定反射镜的转轴平行于载机偏航轴,其零位不受横滚姿态扰动影响。在步骤(3)进行的同时,将-γ/2作为音圈电机2的位置环PID命令输入,控制稳定反射镜绕横滚稳定轴反向转动到-γ/2角位置,实现反向转动γ/2角,从而保证成像系统视轴对应物点始终稳定在机下点A,实现航空遥感成像系统视轴在惯性空间俯仰方向和横滚方向的实时稳定。
2.2 试验结果与分析
图7为飞行模拟试验系统俯仰方向和横滚方向均产生幅值3°的正弦姿态扰动时的实时视轴稳定控制曲线,从图7可以看出,实时视轴稳定命令与姿态扰动反相且幅值为姿态扰动角的一半,与位置环PID命令输入一致。实时视轴稳定命令与实际执行反馈相减得到稳定误差。由图7中稳定误差的放大曲线可得,惯性空间俯仰方向的稳定误差在±0.006°范围内变化,横滚方向的稳定误差在±0.008°范围内变化。

图7 正弦姿态扰动时的实时视轴稳定控制曲线Fig.7 Real-time LOS stabilization control curve derived from sinusoidal attitude disturbance
由于实时视轴稳定命令的执行对象为45°反射镜和稳定反射镜,考虑到平面镜成像的倍角关系,实时视轴稳定误差与图中的稳定误差存在二倍关系,从而得到惯性空间俯仰方向的实时视轴稳定误差在±0.012°范围内变化,横滚方向的实时视轴稳定误差在±0.016°范围内变化。对于视轴稳定来说,选择稳定误差的均方根值(RMS)作为稳定精度[3]。由于电机执行命令存在一定的滞后性,图7中的稳定误差呈现近似正弦变化,据此选择误差峰峰值的1/3作为RMS的近似,最终得到惯性空间俯仰方向的实时视轴稳定精度RMS为0.008°,横滚方向的实时视轴稳定精度RMS为0.011° 。
图8给出了飞行模拟试验系统俯仰方向和横滚方向均产生幅值3°的正弦姿态扰动时的视轴稳定前后实验室内对外成像效果对比图,其中成像视场的水平方向代表翼展方向,竖直向上方向代表飞行方向。视轴稳定前,由于俯仰方向和横滚方向均产生幅值3°的正弦姿态扰动,导致航空遥感成像系统视轴对应的机下点轨迹及拼接图像呈现S型,视场发生严重偏移。假如按预先设定好的航线在这种状态下飞行,地物必然漏扫,导致飞行作业失败。视轴稳定后,航空遥感成像系统视轴对应的机下点轨迹与飞行轨迹能够较好吻合,视场在惯性空间稳定。飞行模拟试验表明,基于成像系统双反射镜的实时视轴稳定技术可以有效隔离俯仰方向和横滚方向的姿态扰动,能够实现航空遥感成像系统视轴在惯性空间俯仰方向和横滚方向的实时稳定,稳定效果较好。

图8 飞行模拟试验系统视轴稳定前后实验室内对外成像效果对比Fig.8 Outdoor scenery before-and-after LOS stabilization obtained by flight simulator test system in the laboratory
3 结 束 语
本文提出了基于双反射镜的航空遥感成像系统实时视轴稳定技术,有效解决了垂直对地成像作业时载机姿态扰动导致成像系统视轴在惯性空间晃动的问题。实验室内飞行模拟试验的结果表明,惯性空间俯仰方向的实时视轴稳定精度RMS可达0.008° ,横滚方向的实时视轴稳定精度RMS可达0.011° 。相比于采用万向环架结构的传统视轴稳定技术,基于成像系统双反射镜的实时视轴稳定技术由于采用小转动惯量的光学元件实现,在稳定控制方面更有优势,而且双反射镜的转动惯量更小,作为稳定功能的执行部件,转动惯量越小,系统的惯性延迟越小,对姿态变化的反应越快,在系统带宽的提升上也有较大优势。将此技术应用于航空遥感成像系统,能够有效隔离载机俯仰方向和横滚方向的姿态扰动,保证成像系统视轴和视场在惯性空间的实时稳定,稳定效果明显。
