考虑前车制动意图的自动紧急制动策略及其测试评价方法*
2024-03-01杨澜杨一鹏刘松岩胡志强杨炜
杨澜 杨一鹏 刘松岩 胡志强 杨炜
(长安大学,西安 710018)
主题词:车辆主动安全 自动紧急制动 制动意图 测试与评价 联合仿真
1 前言
自动紧急制动(Autonomous Emergency Braking,AEB)系统作为一种高级辅助驾驶系统,是目前最有效的避撞技术之一。系统通过多种车载传感器获取车辆状态,实时判断车辆与周围车辆、行人、自行车等交通参与者的潜在碰撞风险,以提醒或自主制动方式避免碰撞或者降低碰撞事故的严重程度[1]。前期大量研究发现,AEB 系统可以减少追尾事故数量25%~50%[2-5],显著提高了道路交通安全性。
为了提高AEB 系统的避撞性能,国内外学者对AEB 控制策略进行了大量研究。在基于无线通信技术优化车辆感知能力方面,Sun 等[6]针对智能网联车辆的驾驶风险感知技术展开研究,提出了能够实时预测和跟踪周围车辆运动轨迹的主动避撞系统,提高了车辆自动驾驶能力和道路交通安全性;在融合驾驶人特性优化AEB系统鲁棒性与适应性方面,Fei等[7]基于碰撞时间余量提出了一种可分级避撞算法,利用两车间的运动状态信息判断工况危险程度,较好地适应了不同驾驶人的避撞特征;在考虑驾驶人行为和生理信号等信息提高驾驶意图识别性能方面,Li等[8]采用转向盘角度、相对横向偏移量和横向速度对驾驶意图进行识别,为车辆避撞控制策略设计提供了基础。此外,评价指标的选择在AEB测试评价研究中起到了关键作用。现有大部分评价方法均遵循相关标准展开,该类方法较难全面客观地评价AEB系统的性能。在评价指标的优化方面,Lin等[9]引入层次分析法对碰撞时间(Time-To-Collision,TTC)、停车相对距离和速度减少量进行权重计算,考虑了系统安全性和舒适性,通过仿真测试验证了该方法的合理性。通过文献调研发现,目前AEB 避撞策略仍存在识别信息不全面、数据来源不理想以及评价体系不健全等问题。
智能网联汽车通过车-车通信可以实现与周围车辆的信息交互,有效扩大车辆感知范围,提高决策的准确性。因此,本文通过车-车通信感知前车制动意图,建立考虑前车制动意图的AEB 控制策略,以车辆安全性与舒适性为目标,基于层次分析法建立AEB 综合评价方法,通过对比试验验证模型在前车制动场景下的有效性,以期进一步提高AEB系统的安全性和适应性。
2 驾驶人数据采集
2.1 联合仿真平台搭建
本文基于PreScan、Simulink和驾驶模拟器搭建联合仿真平台,如图1 所示。其中,PreScan 与Simulink 用于搭建虚拟仿真环境和建立车辆控制逻辑,驾驶模拟器用于模拟真实驾驶环境。
2.2 试验设计
选取10名驾驶人开展重复性驾驶试验。试验人员平均驾龄为5 年,男性与女性的比例为7∶3。具体采样方案与步骤如下:
a.连接设备,保证软、硬件正常运行。
b.试验人员熟悉设备与采样流程,进行适应性练习。
c.采样开始,试验人员控制车辆起动,向前行驶。
d.控制车辆加速至稳定车速,最高车速为90 km/h。
e.根据试验需要,试验人员以轻微、正常、紧急制动意图进行主动制动操作,直至车速降为0,结束本次采样。
f.一次采样后,若试验数据异常,不记录本次采样结果,重复步骤c~步骤e,若数据有效,记录试验数据。
g.每名试验人员以不同制动意图分别进行10次重复性采样试验,共计采样30次。
h.更换试验人员,重复步骤b~步骤g,结束试验。
2.3 数据预处理
2.3.1 基于K-均值聚类的制动意图分类
为了确定不同时刻潜在的真实制动意图,本文使用K-均值(K-Means)聚类方法对试验采集到的33 209 个数据点进行分类,以表征轻微、正常、紧急3 种制动意图。K-均值作为一种简单、运算速度快、收敛速度快的分区算法,广泛应用于回归预测、数据挖掘、图像识别等领域[10],故本文采用该方法搭建意图识别模型。选择制动踏板压力作为分类参数,算法运行结果图2 所示,其中,制动踏板压力的范围为0~14 MPa,制动踏板压力变化率为0~120 MPa/s,轻微制动与正常制动意图间的阈值为4.35 MPa,正常制动与紧急制动意图间的阈值为9.8 MPa。

图2 K-均值算法分类结果
2.3.2 基于滑动时间窗口的数据序列提取
为了满足制动意图识别实时性的要求,以及使用固定时长历史数据进行制动意图识别的需要,使用滑动时间窗口对模型训练数据进行提取。滑动时间窗口如图3 所示,其中T1、T2、T3分别为时间步长和表征制动行为与制动意图的时间长度,数据提取范围定义为制动踏板压力开始不为零至车速降为零的数据区间。
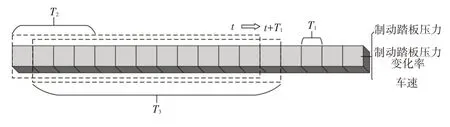
图3 滑动时间窗口原理
表征制动行为与制动意图的时间长度与实际操作耗时有关。原始数据步长为0.05 s,紧急制动意图下平均制动耗时为2.6 s,驾驶行为对应时间分布在0.5~2.0 s范围内。设置不同滑动时间窗口参数组合,参数组合1设置为T1=0.1 s、T2=0.4 s、T3=2.0 s,参数组合2 设置为T1=0.1 s、T2=0.3 s、T3=1.2 s,参数组合3设置为T1=0.05 s、T2=0.2 s、T3=0.8 s,提取各制动意图数据,并以8∶2 的比例划分训练集与数据集,提取结果如表1所示。
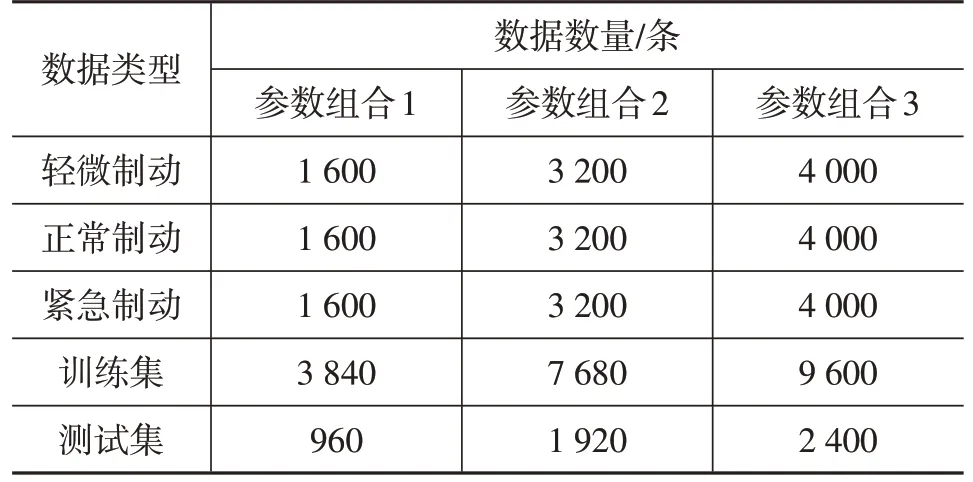
表1 基于不同参数组合的制动意图数据选取
3 基于双层隐马尔可夫的制动意图识别模型
3.1 双层隐马尔可夫模型
双层隐马尔可夫模型(Hidden Markov Model,HMM)对时序数据具有较好的建模效果,是一种生成模型,且训练过程中收敛速度较快,不需要大量训练样本即可获得较好的识别精度。因此,本文选择双层HMM对潜在制动意图进行识别[11]。双层HMM由初始状态概率向量Π、状态转移概率矩阵A和观测概率矩阵B组成,可以用λ=(Π,A,B)表示。本文使用双层HMM对制动意图进行识别,如图4所示。
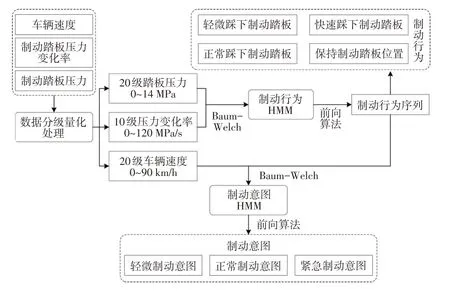
图4 双层HMM模型工作原理
3.1.1 数据分级量化
本文使用制动踏板压力、制动踏板压力变化率和车速作为训练参数。由于原始数据为高精度离散数据,导致观测状态数量过大,因此依据采集到的39 276个数据点对原始数据进行分级量化处理,根据数据均匀分布的原则分别将制动踏板压力、制动踏板压力变化率、车速分为20级、10级和20级,结果如表2所示。
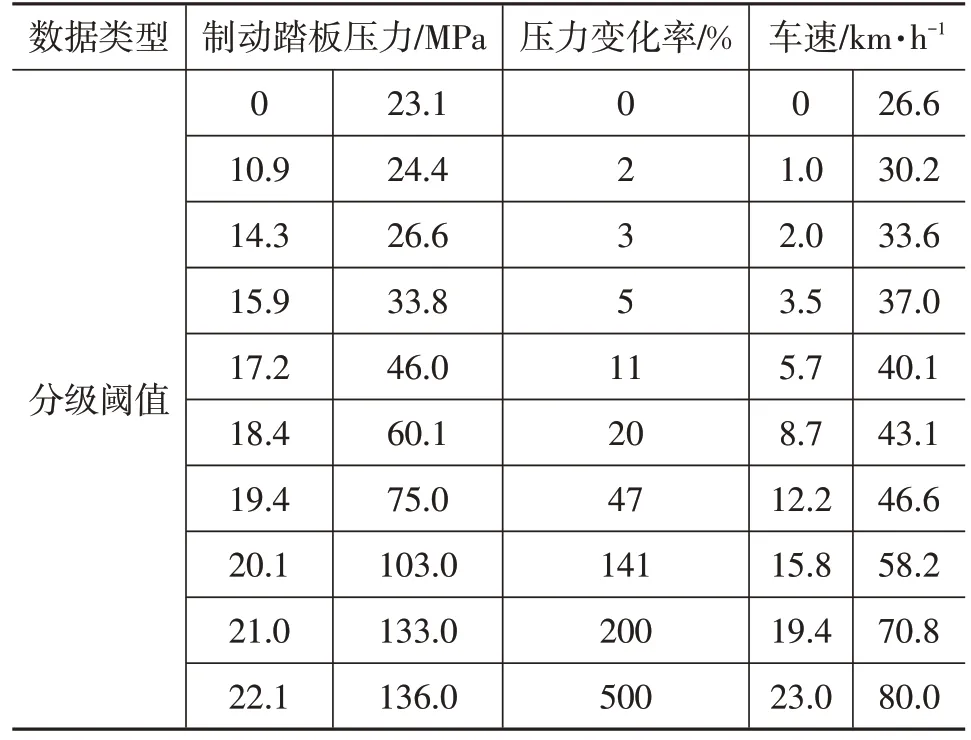
表2 数据分级量化结果
3.1.2 双层HMM定义
制动行为HMM以制动踏板压力及其变化率作为模型输入参数,识别结果为4 种制动行为,即轻微、正常、快速踩下制动踏板和制动踏板压力保持不变。基于HMM的制动意图模型以制动行为数据与车速数据作为模型输入参数,识别结果为3 种制动意图,即轻微、正常、紧急制动意图。
当已知多样本观测序列时,假设有D个相互独立的观测序列{O1,O2,…,OD},每组样本可以表示为Od={o1,o2,…,oT}的情况下,使用鲍姆-韦尔奇(Baum-Welch)算法对模型参数λ=(A,B,Π)进行重估:
a.随机初始化模型参数A、B、Π。
b.为每个序列求解2个中间变量γt(d)(i)和ξt(d)(i,j):
式中:N为每个时刻隐藏状态数量,L为数据维度,αt+1(j)、βt(i)分别为前向概率、后向概率。
其中,αt+1(j)、βt(i)的计算公式分别为:
c.通过2个中间变量求解模型各参数:
式中:T为时间长度。
2 种模型算法公式相同,而具体参数不同,各模型参数定义如表3所示。
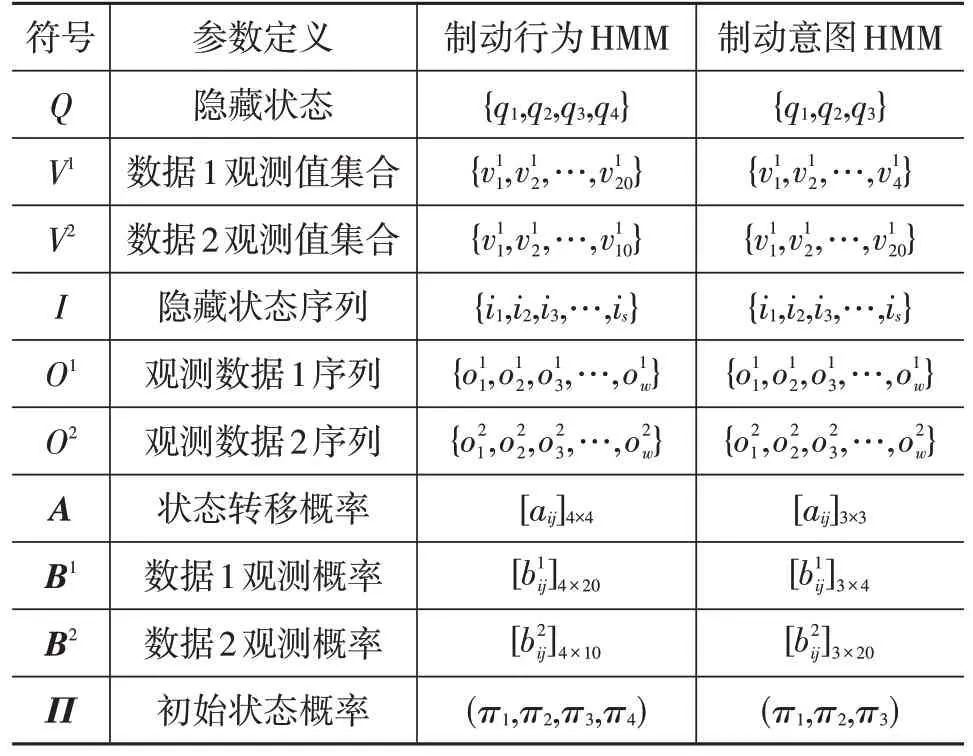
表3 双层HMM参数定义
3.1.3 双层HMM识别结果
本文选择精确率P、召回率R、F1-分数F和精确率A作为评估参数对模型识别效果进行评价,其中,精准率定义为正确当前制动意图在识别结果为当前制动意图中所占的比例,召回率定义为真实制动意图中识别结果为当前意图的比例,F1-分数为精准率与召回率的调和平均值,准确率为识别正确的意图占所有测试意图的比例:
式中:TP、FP、TN、FN分别为真正例、假正例、真负例、假负例数量。
使用表1提取到的3种测试集对各组合训练出的双层HMM 参数进行验证,识别结果如图5所示,由图5可知,第3 组参数组合提取出的数据集模型识别效果最好,4种评价参数平均结果可达到97%以上,证明其代表的模型分类能力最强。

图5 双层HMM识别结果
3.2 考虑前车制动意图的AEB控制策略
为避免前车制动工况下发生追尾碰撞,主车AEB控制策略获取前车不同制动意图和车速等信息后,考虑车-车通信时的网络通信延迟和主车制动压力建立时间,计算临界安全阈值,并采用特定减速度进行自动制动操作,该控制策略下车辆避撞过程如图6 所示:前车将制动意图、车速与加速度等信息传递到后方主车,在t1时间间隔的通信延迟中,前、后两车分别行驶了Df1和Db1的距离;主车在计算临界安全阈值时,考虑制动压力建立时间t2的时间间隔中,前、后两车行驶的距离分别为Df2和Db2;后车在确定了自动制动的控制决策后,采用特定减速度进行制动,直到车辆碰撞风险解除(后车减速到与前车速度相同),在此过程中,前、后两车行驶距离分别为Df和Db,且最后仍保持安全距离D0。系统具体控制逻辑如图7所示,其中主车通过AEB算法实时计算临界安全阈值,通过将其与实际车间距进行对比,对车辆当前状态进行判断,然后介入车辆控制。
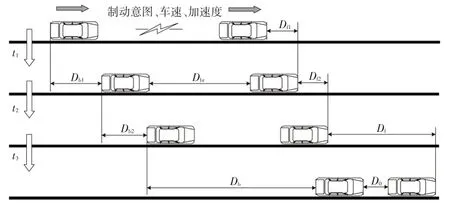
图6 车辆避撞过程分析

图7 AEB控制策略逻辑
假设前车速度小于主车速度,主车根据不同制动意图下的安全距离制定相应决策控制方法。
3.2.1 轻微制动意图下临界安全距离
当前车以轻微制动意图减速时,前车将识别出的制动意图与车速传输到主车,主车判断有碰撞风险时,以固定减速度进行减速,直至两车速度相同,此时两车车速为安全车速,且大于0,安全车速的计算公式为:
临界安全距离为:
式中:vf为前车车速,af为前车制动减速度,vb为主车当前车速,ab为主车制动减速度,vs为安全车速,t1为驾驶员反应延迟时间,t2为制动器延迟时间。
3.2.2 正常制动意图下临界安全距离
当前车以正常制动意图进行减速时,主车根据当前工况下的危险程度,以最大制动能力进行减速,若前车制动停车时间大于主车制动停车时间,两车在车速降为0之前达到安全状态,安全车速见式(12),反之,安全车速为0。因此,正常制动意图下的临界安全距离为:
式中:abmax为主车最大制动减速度,D0为两车间最小安全距离。
3.2.3 紧急制动意图下临界安全距离
当前车制动意图为紧急制动时,前车以最大减速度进行减速,此时后方主车同样以最大减速度进行制动避撞操作,由于前车初始车速低于主车初始车速时才存在碰撞风险,因此两车安全速度为0,临界安全距离为:
式中:afmax为前车最大制动减速度。
4 模型测试与评价
4.1 仿真测试方法
采用PreScan 与Simulink 建立虚拟仿真测试环境。在PreScan 中建立天气、光照、道路、车辆和环境等场景要素,添加车辆传感器,在Simulink 中建立AEB 控制策略及其计算逻辑,并反馈到仿真环境中。
4.1.1 仿真环境
搭建一条直线道路,选取中间车道作为测试道路,添加主车(Lexus GS)和前车(Audi A8),并为车辆添加车辆动力学模型、驾驶人模型等,如图8所示。

图8 三维仿真环境
搭建可视化仿真环境,为了保证测试条件的规范性,参考中国新车评价规程(China-New Car Assessment Program,C-NCAP)技术标准[12],设置场景参数如表4所示。

表4 场景参数设置
4.1.2 测试条件
参考AEB 测试标准,考虑不同制动意图和低、中、高速场景测试需求,设计测试条件,如表5 所示。前车为减速状态,在不同制动意图下设置前车减速度。

表5 测试场景条件设置
4.2 AEB综合评价方法
目前的AEB评价方法以是否碰撞作为唯一评价指标,只考虑了车辆的安全性,未考虑驾驶人的驾驶体验。本文参考国际测试评价标准和测试评价相关论文[13],选择7种评价指标构建AEB综合评价方法,包括是否碰撞、最小车间距[14]、制动停车距离[15]、碰撞相对速度[16]、速度降低比例[16]、TTC[16]和系统介入相对距离[17]。
基于层次分析法对7 种评价指标在评价体系中所占权重进行计算,构造判断矩阵A:
计算矩阵A的每行元素乘积:
计算M中每行元素的7次方根:
计算矩阵A的最大特征根:
式中:n为矩阵A的行列数。
一致性检验结果为:
式中:IC为一致性指标,RC为一致性比率。
因此,可以认为判断矩阵A具有满意的一致性,各因素的权重具有可信性,最终权重系数结果如表6 所示。
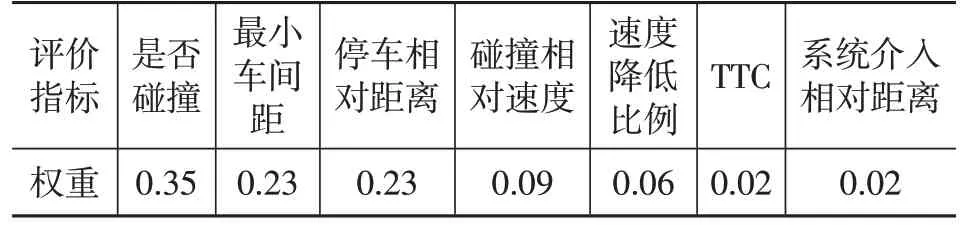
表6 7种评价指标权重
4.3 对比验证
4.3.1 典型AEB模型
为了验证本文AEB 模型在车辆避撞场景中前车制动工况下的有效性,与基于安全距离的马自达(Mazda)、本田(Honda)、伯克利(Berkeley)模型和基于碰撞时间的TTC模型4种典型AEB模型进行对比。
马自达模型的临界安全阈值为:
式中:v为主车车速;vrel为两车相对车速;a1、a2分别为前车、主车最大减速度,本文取a1=a2=7 m/s2;t1=0.1 s;t2=0.6 s;d0为最小停车距离,本文取d0=3 m。
取a1=a2=7 m/s2、t1=0.5 s、t2=1.5 s,本田模型的临界安全阈值为:
式中:v2为前车车速。
取t1=1 s、t2=0.2 s,伯克利模型的临界安全阈值为:
式中:amax为两车最大制动减速度,本文取amax=7 m/s2。
TTC模型的碰撞时间和临界安全阈值为:
式中:drel为两车相对距离;d0为安全停车距离,取d0=3 m。
具体控制逻辑如下:
a.1.6 s≤tTTC<2.6 s时,系统报警,提醒驾驶人进行制动;
b.0.6 s≤tTTC<1.6 s时,系统自动紧急制动,制动压力为最大制动压力的40%;
c.tTTC<0.6 s 时,系统自动紧急制动,制动压力为最大制动压力。
4.3.2 仿真结果分析
对4 种典型AEB 模型与本文模型在轻微、正常、紧急制动场景下的避撞效果进行测试,结果如图9 所示。TTC 模型控制策略较为激进,在前车制动场景中易产生碰撞,尤其在中高速场景下不能避撞;本田模型与伯克利模型在轻微、正常制动场景下能够及时避撞,但是驾驶人舒适性较差,而在紧急制动场景下,当车速高于60 km/h时,不能避免碰撞的发生,因此这2 种模型适应性和舒适性较低;马自达模型与本文模型均能有效避免碰撞发生,但由于马自达模型过于保守,导致提前制动而评分较低。
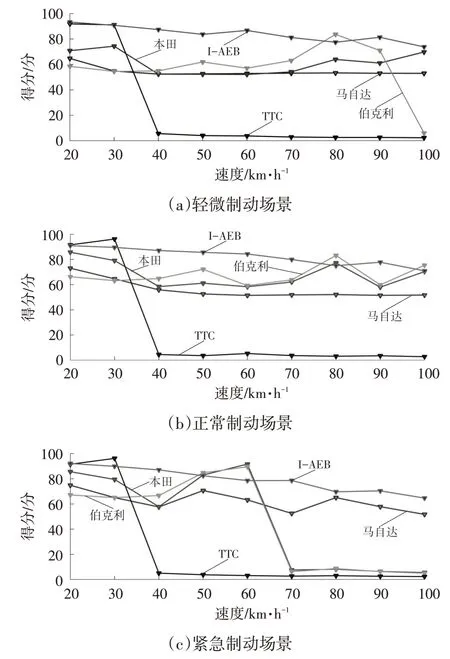
图9 模型对比结果
综合以上测试结果,统计模型在各制动意图下的得分情况,如表7所示,本文模型得分最高,证明本文模型在保证车辆安全性的基础上,能够很好地保证驾驶人的驾驶舒适性,不会过早或过晚介入车辆控制,进一步提高了AEB系统的适应性、安全性和舒适性。
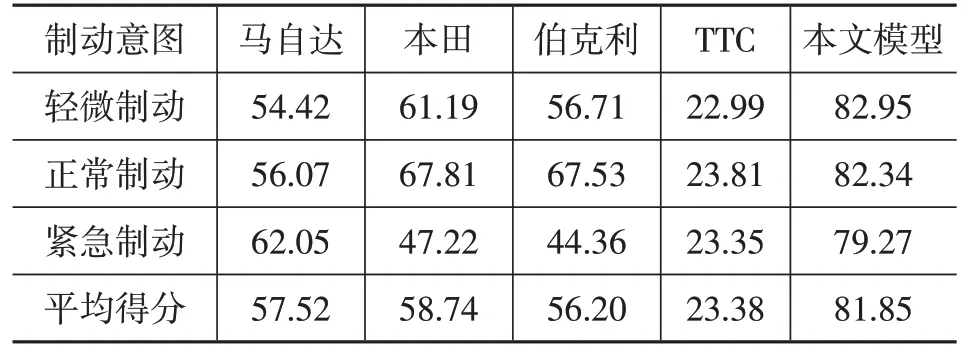
表7 5种模型评价得分情况
5 结束语
本文通过搭建联合仿真平台采集驾驶人制动数据,构建了基于双层HMM的驾驶人制动意图识别模型和基于前车制动意图的AEB 避撞控制策略,通过AHP 综合评价方法验证了模型在前车制动危险场景下的有效性。可以得出以下结论:
a.使用制动踏板数据与车速数据识别制动意图,基于滑动时间窗口进行数据序列提取,时间步长取0.05 s,表征驾驶行为的时间取0.2 s,表征驾驶意图的时间取0.8 s较为合理;
b.使用双层隐马尔可夫模型对轻微、正常、紧急制动意图的识别准确率可以达到97.83%;
c.考虑前车制动意图的AEB 控制策略在前车制动场景下,在保证安全的前提下,也能保证驾驶人的驾驶体验和舒适性。
本文研究的局限在于,驾驶人样本量较少,未考虑不同驾驶人特性对制动意图识别模型训练的影响,同时,AEB控制策略未考虑天气、光照、道路条件等因素的影响。因此,下一步研究中,将综合考虑以上因素,采集不同类型的驾驶人的驾驶数据,以提高模型的鲁棒性和普适性。