基于动态碰撞时间的自动紧急制动策略设计*
2024-03-01杨贺博张小俊罗耿耿奚敬哲
杨贺博 张小俊 罗耿耿 奚敬哲,3
(1.河北工业大学,天津 300401;2.长城汽车股份有限公司,保定 071000;3.中国汽车技术研究中心汽车工程研究院,天津 300300)
主题词:自动紧急制动 碰撞时间 主动安全 硬件在环
1 前言
自动紧急制动(Automated Emergency Braking,AEB)系统作为汽车主动安全系统的重要组成部分,可以有效避免人为失误造成的追尾碰撞事故[1-2],已经成为国内外汽车制造商及研究机构在主动安全领域的研究热点。目前,对AEB 系统的研究主要围绕基于安全距离和碰撞时间的控制策略展开。基于安全距离的AEB 控制策略以自车与前车的距离作为触发条件,主要有Mazda 模型、Honda 模型、Berkely 模型和SeungwukMoon 模型等[3-4]。此外,为保证制动过程的舒适性,黄城等[5]设计了满足舒适性条件的减速度曲线并对安全距离模型进行了优化;吕凯光等[6]通过引入驾驶风格识别系数,从时间尺度和距离尺度修正了安全距离模型,提高了AEB 系统的接受程度和驾驶舒适性,可满足不同驾驶员的个性化需求;赵林峰等[7]针对车辆纵向跟驰过程中的避撞问题,通过分析制动减速度与平稳性的相关性,提出了一种考虑车辆运动状态和路面附着系数等因素的改进安全距离模型,并通过联合仿真和硬件在环仿真验证了该策略可以在保证行驶安全性的前提下改善车辆制动平稳性和舒适性。
基于碰撞时间的AEB控制策略以自车和前车在当前运动状态下发生碰撞所需的时间(Time To Collision,TTC)作为触发条件。在此基础上,李霖等[8]采用碰撞时间倒数和期望减速度设计了行车风险估计算法,对设计适用于中国用户的AEB系统具有重要意义。Han等[9]将路面附着系数与TTC 相结合,提出了自适应TTC 阈值,提高了AEB 系统在不同路面下的性能。兰凤崇等[10]使用两层控制思想对AEB 控制策略进行设计,仿真结果表明,在保证舒适性的前提下可以避免碰撞或减轻碰撞伤害。
在真实行车过程中,以固定标准判断制动时机,可能会导致车辆在低速工况下过早制动,干扰驾驶员正常驾驶,在高速工况下过晚制动,致使碰撞发生。针对上述问题,本文提出考虑自车车速的动态碰撞时间模型,根据车速确定TTC阈值,形成不同车速下的动态制动策略,在下层控制器使用PI 控制对车辆减速度进行精准控制。最后,采用硬件在环仿真对所提出的AEB 控制策略进行验证。
2 AEB控制策略设计
2.1 上层决策模块设计
基于TTC 的AEB 控制策略在车辆行驶过程中根据前方障碍物位置、速度等信息和自车状态实时计算并判断TTC是否小于算法所设定的阈值,当TTC小于阈值且驾驶员未采取避撞行为时,AEB 系统介入,触发车辆制动。TTC的计算公式为:
式中:dr为两车间的相对距离,vr为前车相对于自车的车速。
该TTC 模型所需参数少、计算简单,但在两车车速接近时,即使两车距离较近,TTC 也会较大,不会触发AEB制动。因此有学者对其进行改进,提出了改进TTC模型[11]:
式中:Δ=vr2-2drar,Δ≥0表示此时两车存在碰撞风险;ar为两车间的相对加速度;“未定义”表示车辆此时处于安全状态,TTC模型无需进行计算。
本文基于改进TTC 模型设计行车过程中的预警和制动策略,改进TTC模型所需参数由各传感器提供。传统AEB 系统在触发制动时采取单级制动策略,即以最大制动强度进行制动,但是在高速工况下,该制动方式易发生追尾且影响车辆稳定性。因此,为保证行车安全性与舒适性,在低速工况下,AEB 系统应以大减速度较晚介入,高速工况下,AEB系统应采用两级制动策略,即优先采用小减速度制动,仍不能避免碰撞时再采用全力制动,从而使得AEB系统的介入方式更舒适、平顺[12]。
此外,若AEB 系统预警/制动过程中驾驶员进行制动且制动强度大于AEB系统当前制动强度或驾驶员进行转向避撞(转向盘转角变化率>90(°)/s)时,AEB 系统退出,将车辆控制权交还给驾驶员。
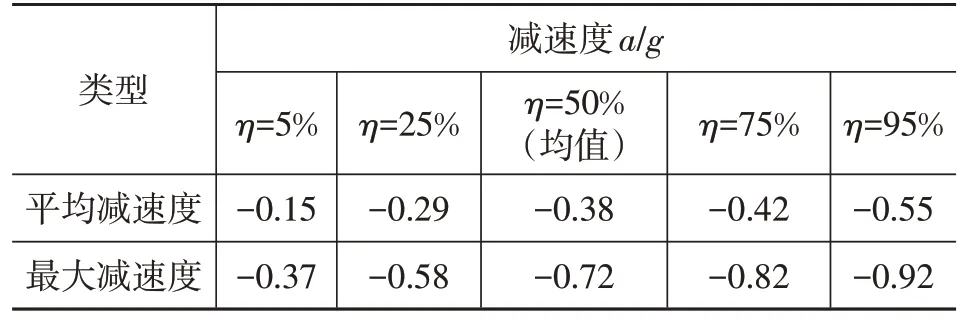
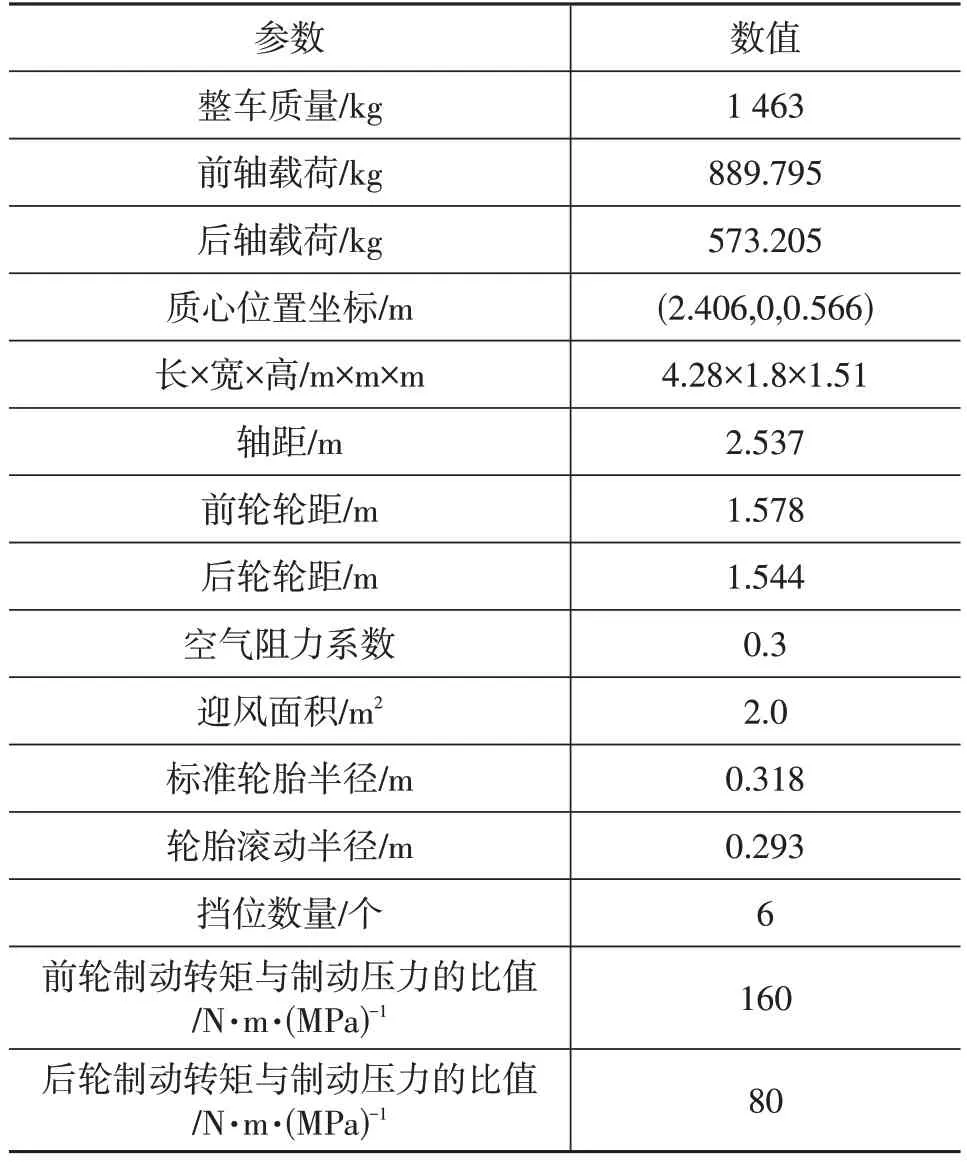
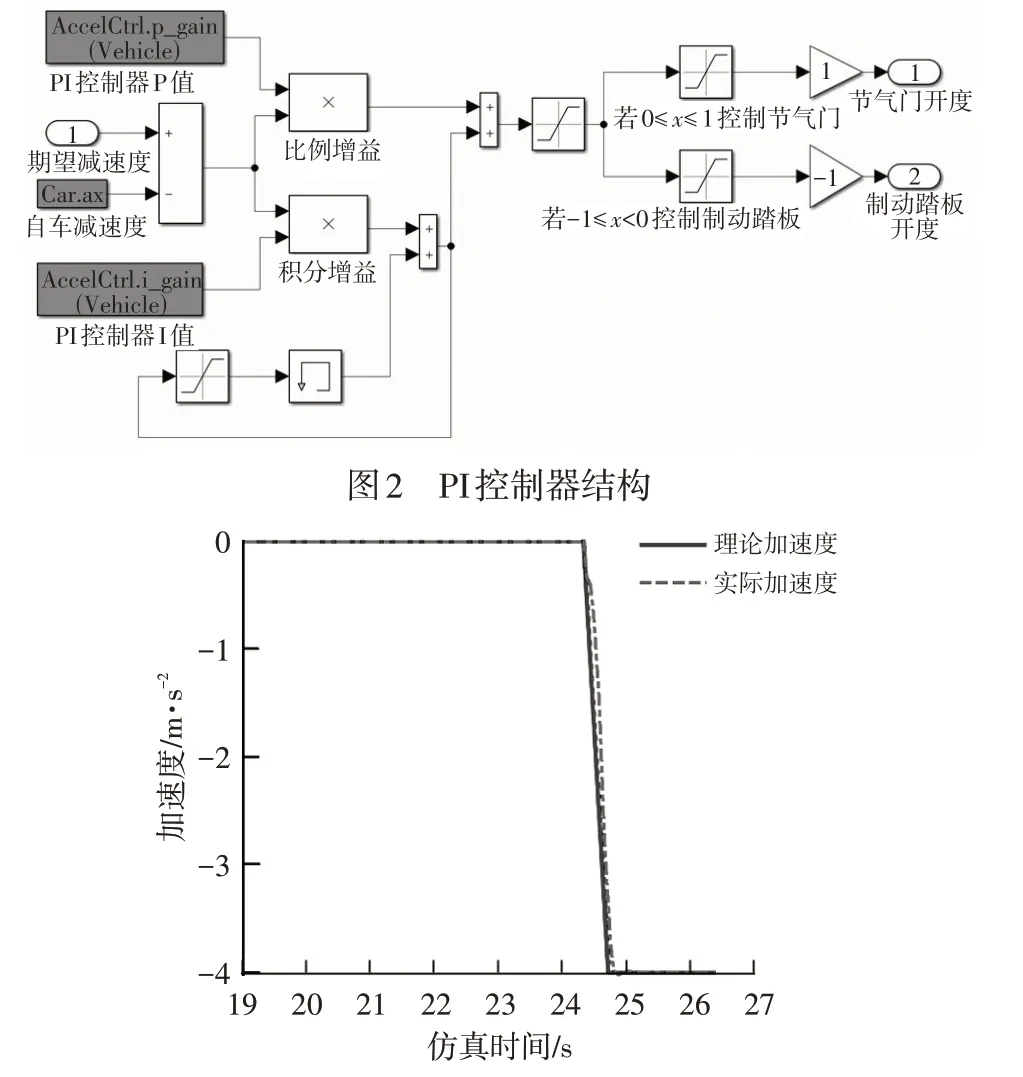
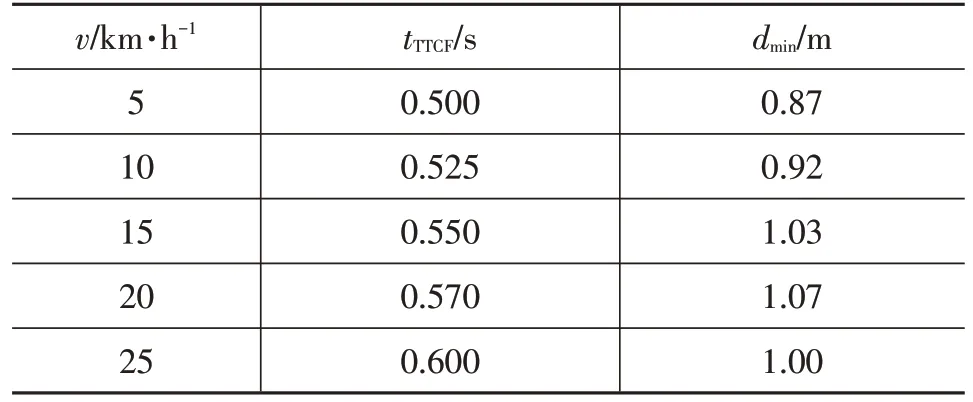
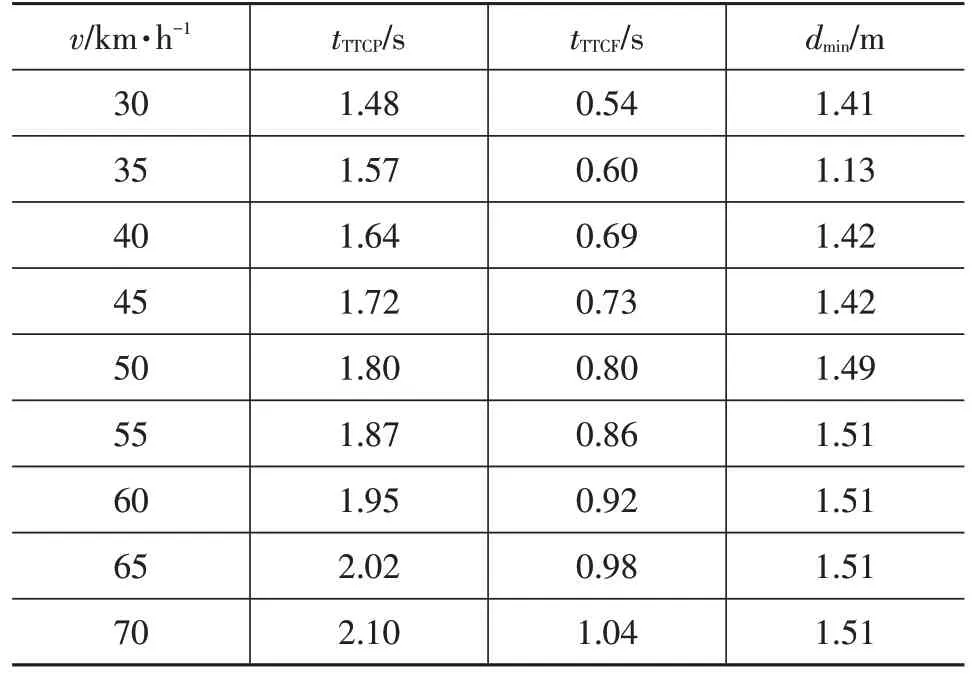
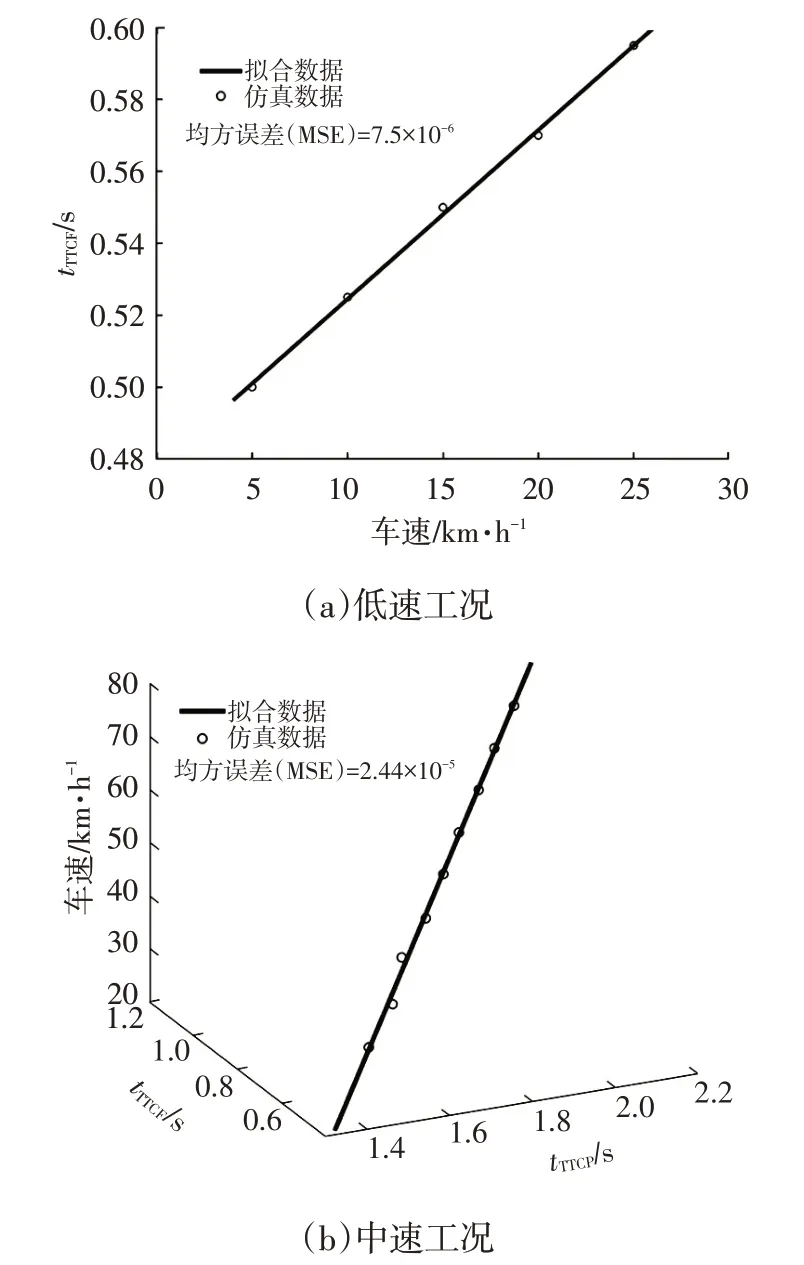
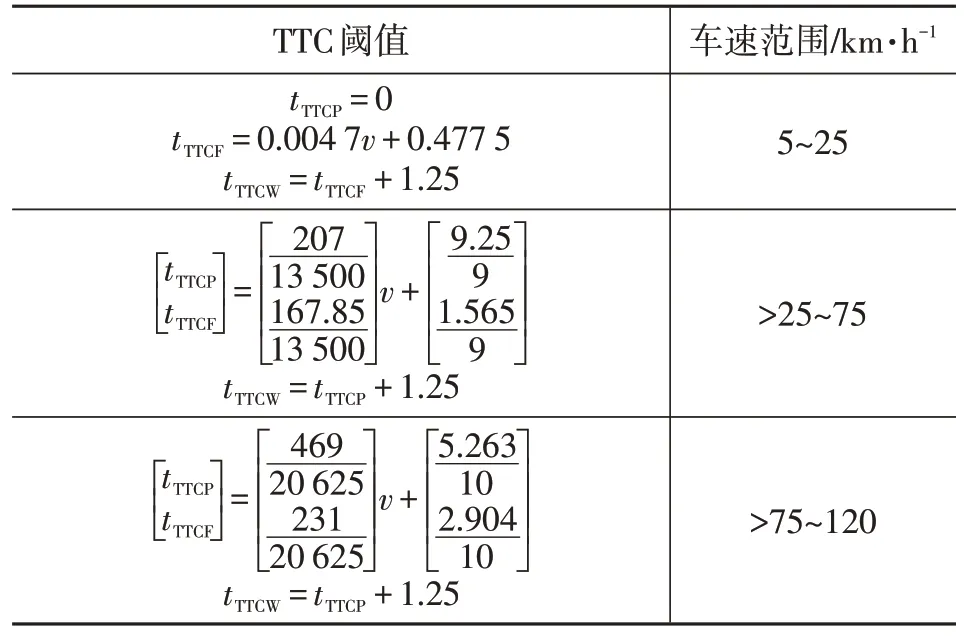
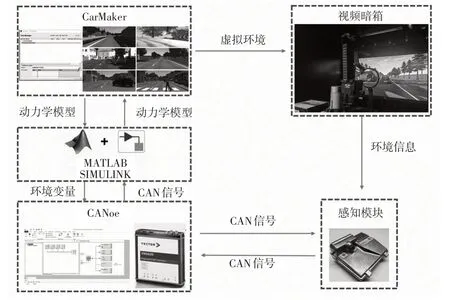
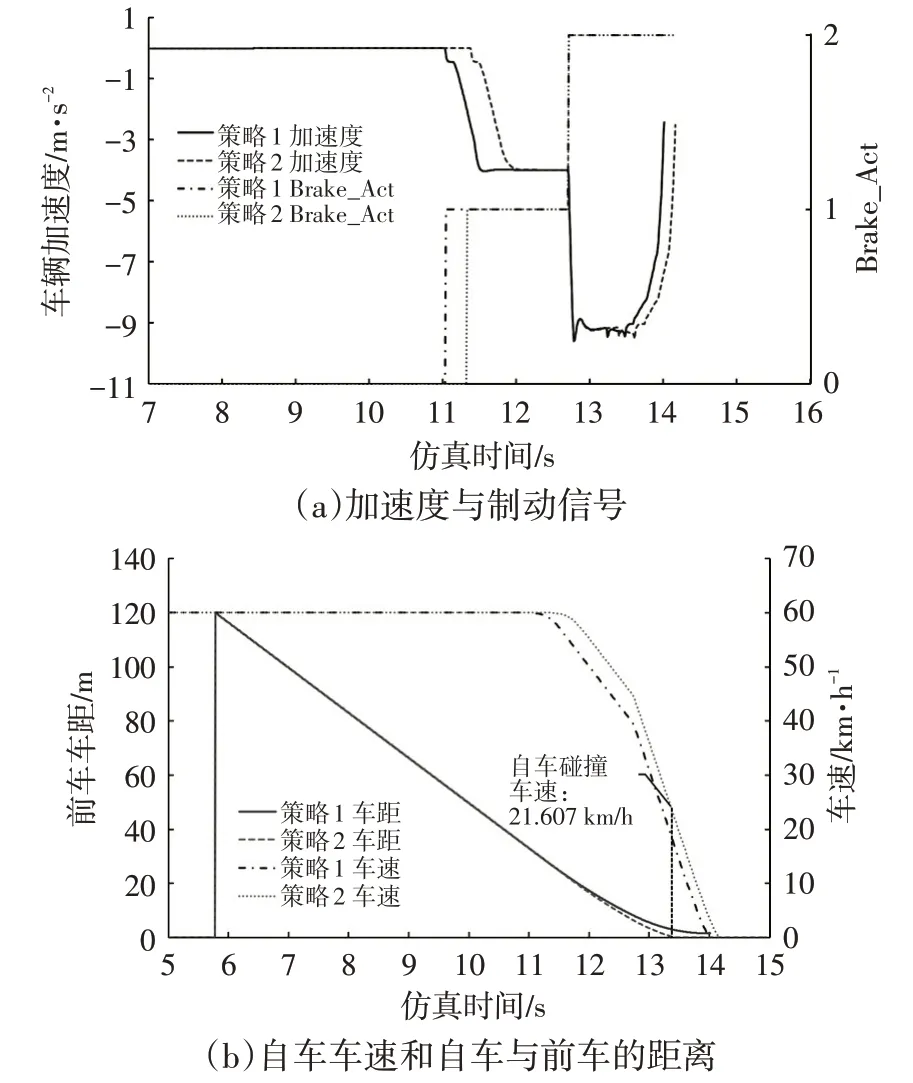
综合以上考虑,本文AEB控制策略设计如下:在低速(自车车速v<25 km/h)工况下采用单级制动方式,tTTC小于预警阈值tTTCW时触发声光报警,提醒驾驶员制动,若驾驶员未采取制动动作且tTTC小于全力制动阈值tTTCF时,AEB系统输出全力制动信号(Brake_Act=2),车辆进行全力制动;在高速工况下采用两级制动的方式,其预警过程与低速工况相同,tTTC 图1 AEB系统决策流程 美国国家公路交通安全管理局(National Highway Traffic Safety Administration,NHTSA)统计了83 名驾驶员紧急制动时的平均减速度与最大减速度规律,如表1所示[13],其中η为驾驶员数据累计百分比。 表1 紧急制动规律 结合表1与文献[8]的研究,参考绝大多数驾驶员紧急制动时的平均减速度,选取-4 m/s2作为部分制动减速度。 根据AEB 控制决策模块输出的制动决策信号,下层控制器输出制动踏板开度、节气门开度、制动灯状态,完成对车辆状态的实时控制。 2.2.1 车辆模型搭建 使用CarMaker 搭建车辆动力学模型,其可对车辆动力形式、悬架、制动、转向、车身、传感器模型等进行方便快捷的设置,本文所搭建的车辆动力学模型主要参数如表2所示。 表2 车辆主要参数 2.2.2 制动过程控制 根据控制决策模块输出的减速度请求,PI 控制器以期望减速度与车辆当前减速度之差为输入,输出节气门与制动踏板开度信号实现车辆减速度的精准快速控制。通过试凑法确定下层PI 控制器参数为P=0.01、I=0.003 5,其结构如图2所示。 为保证制动过程舒适性,AEB 系统制动时,采取制动力缓升的方式。由于满足乘员驾乘舒适性的最大减速度变化率为10 m/s3[14],故设计AEB 系统制动介入时,减速度在0.4 s 内达到-4 m/s2,使用PI 控制实际减速度曲线如图3所示。 图3 PI控制减速度曲线 为避免TTC 处于制动阈值临界点时制动力波动导致的车辆抖动问题,当触发部分制动时,制动压力维持至少0.6 s,避免制动信号反复触发,触发全力制动时,维持制动压力直到车辆制动至停车。 由TTC 模型可知,当两车相对速度不变时,TTC 只与dr有关,而与自车车速无关,但在实际行车过程中,高速跟车时两车距离应较大,低速跟车时两车距离应适当减小,若在不同速度工况下采用固定TTC阈值作为AEB触发标准,可能会导致中高车速下制动不及时而发生碰撞,低速工况下虽然能避免碰撞,但是会干扰驾驶员正常驾驶,影响行车舒适性。因此,采用固定TTC 阈值的AEB控制策略无法兼顾行车安全性与驾驶舒适性,需要结合自车车速确定不同工况下的TTC阈值。 3.2.1 各车速下TTC阈值确定 根据上述分析,AEB控制策略TTC阈值的确定应考虑自车车速,因此设计试验确定不同车速下合适的TTC阈值。 选取两车相对车速差距最大的前车静止(Car to Car Rear stationary,CCRs)工况,在不同车速条件下进行多组仿真。为保证仿真精度,将车速划分为低速(5~25 km/h)、中速(>25~70 km/h)、高速(>70~120 km/h)3种范围,在每种车速范围内设置车速以5 km/h递增进行仿真。为保证行车安全性与通行效率,一般选取1.0~2.0 m 作为理想最小安全跟车距离[15],因此,选取低速、中速、高速条件下最小跟车距离dmin分别为1.0 m、1.5 m、2.0 m。调整TTC 阈值进行多次仿真,使得自车在不同车速下完成制动后与前车的距离满足最小跟车距离要求,确定不同车速下合适的制动阈值。最终确定的TTC阈值如表3~表5 所示,其中dmin由相应阈值下进行多次仿真所得到结果取平均值获得。 表3 低速工况下不同车速TTC阈值 表4 中速工况下不同车速TTC阈值 表5 高速工况下不同车速TTC阈值 3.2.2 TTC阈值与车速关系拟合 使用最小二乘法对TTC 阈值与车速的关系进行拟合:对于低速工况,采取二维平面最小二乘法拟合的方式;对于中、高速工况,使用基于最小二乘法的三维空间点直线拟合方法[16]进行拟合,编写Python程序输出拟合方程参数。各工况下拟合方程效果如图4所示。 图4 拟合方程效果 3.2.3 TTC阈值模型确定 已有研究表明,采用声光联合报警时,驾驶员平均反应时间为0.9 s,制动器延时一般为0.2 s[17],为保证驾驶员有充足的反应时间,选取预警时长为1.25 s。故tTTCW选取为由自车车速确定的tTTCF(低速工况)或tTTCP(中、高速工况)增加1.25 s。最终确定TTC阈值模型如表6所示。 表6 TTC阈值模型 为验证所设计的AEB 控制策略的有效性,本文使用感知系统硬件在环台架对其进行仿真验证,如图5所示,其中CarMaker 软件提供仿真场景和车辆动力学模型,感知模块获取视频暗箱内的虚拟场景信息并通过CAN 信号将前车距离等传递给Simulink 中AEB 控制策略,AEB上层决策模块结合车辆当前状态与所处环境信息作出决策,下层控制器完成车辆控制。 图5 感知系统硬件在环测试 仿真场景方面,选取欧洲新车安全评鉴协会(The European New Car Assessment Programme,E-NCAP)针对AEB 功能所规定的CCRs、前车运动(Car to Car Rear moving,CCRm)、前车制动(Car to Car Rear braking,CCRb)3种典型工况进行仿真验证。为测试所设计AEB策略(策略1)在不同工况下的性能,拓展车速范围到15~100 km/h,设置重叠率范围为-50%~50%,并与采用固定TTC阈值的典型AEB控制策略(策略2)进行对比,策略2的TTC阈值设置为tTTCW=2.6 s、tTTCP=1.6 s、tTTCF=0.6 s。搭建仿真场景并使用CarMaker/Test Manager完成自动化测试。 前车静止,自车以不同车速匀速接近前车,两车重叠率范围为-50%~50%,仿真结果如表7所示。 以自车车速为60 km/h,两车重叠率为50%的CCRs(CCRs_60_50%)工况为例,2种控制策略的制动过程曲线如图6所示。 图6 CCRs_60_50%工况制动过程 由图6可以看出,两车距离120 m时,摄像头探测到前方车辆,此时AEB 系统判断无碰撞风险,并未介入。随着两车距离不断接近,tTTC 前车以20 km/h 匀速运动,自车以不同车速接近前车,两车重叠率范围为-50%~50%,仿真结果如表8所示。 自车车速为90 km/h,两车重叠率为-25%的CCRm(CCRm_90_-25%)工况制动过程如图7所示。 图7 CCRm_90_-25%工况制动过程 CCRm_90_-25%工况下,由于本文AEB 策略动态TTC 阈值的设计,高速工况下tTTCP与tTTCF分别为2.573 s、1.298 s,相比于固定TTC阈值的传统AEB策略,制动系统可以更早介入以避免碰撞,且最终跟车距离为3.842 m,符合舒适性与安全性要求。 自车与前车均以50 km/h 匀速运动,两车车距分别为12 m 和40 m,一段时间后,前车分别以-2 m/s2和-6 m/s2的减速度制动,仿真结果如表9所示。 表9 CCRb工况仿真结果 两车车距为40 m,前车制动减速度为-6 m/s2的CCRb(CCRb_40_-6)工况制动过程如图8所示。 图8 CCRb_40_-6工况制动过程 CCRb_40_-6 工况下,两车均以50 km/h 运动,车距保持40 m不变,一段时间后前车以-6 m/s2制动,两车间距缩减,在第7.79 s、第7.96 s 时,传统AEB 控制策略与本文AEB 控制策略触发部分制动,第9.39 s 与第9.44 s时,两系统分别触发全力制动,但由于传统AEB 制动触发时机较晚,未能避免碰撞,碰撞时相对速度为4.979 km/h。 针对现有基于碰撞时间的AEB控制策略未考虑自身车速的局限性,本文设计了动态TTC 阈值AEB 控制策略,并对制动减速度变化率进行限制,使其满足舒适性要求,通过大量仿真确定了不同车速下的TTC 阈值,建立了考虑车速的动态TTC 阈值模型。为验证所设计AEB 控制策略的有效性,利用摄像头在环仿真在ENCAP 规定的不同工况下进行验证,结果表明:本文所设计的AEB 控制策略在3 种工况下安全制动停车的成功率达到95.2%,采用固定TTC阈值的AEB控制策略成功率仅为47.6%;在两车车距为12 m,前车制动减速度为-6 m/s2的CCRb 极端危险工况下,两系统均发生碰撞,但本文所设计的AEB 控制策略相对碰撞车速较传统AEB 控制策略碰撞车速降低70.23%,达到了减轻碰撞的目的。此外,本文所设计的AEB 控制策略最小跟车距离也更为稳定,不会干扰正常驾驶行为,在保证行车安全性的前提下兼顾了驾驶舒适性。 本文对所提出的AEB控制策略只进行了硬件在环仿真验证,并未开展实车测试,算法的实车表现与实际推广仍需结合实车试验开展进一步研究。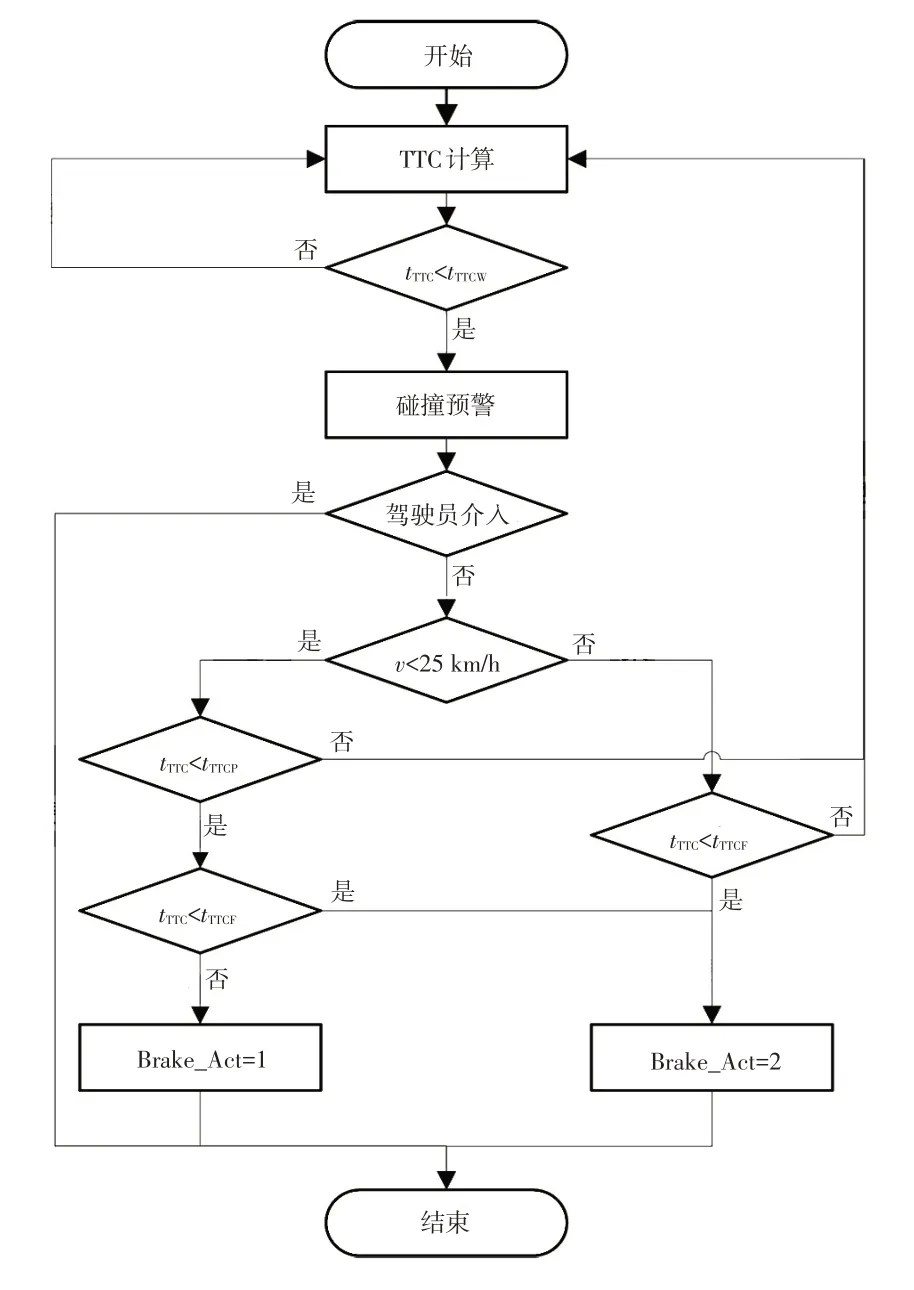
2.2 下层控制器设计
3 考虑自车车速的TTC阈值设计
3.1 固定TTC阈值AEB系统分析
3.2 TTC阈值策略优化

4 AEB系统仿真验证
4.1 CCRs工况
4.2 CCRm工况

4.3 CCRb工况


5 结束语