排球训练机器人扣球位姿修正中的解耦控制
2024-02-29朱祥凤韩盼星
朱祥凤,陈 鹏,韩盼星
(1.百色学院体育学院,广西 百色 533000;2.广西师范大学体育与健康学院,广西 桂林 541004;3.郑州工业应用技术学院体育学院,河南 新郑 451150)
1 引言
人工陪练是排球运动员训练的主要方式,在排球训练过程中,通过分析比赛队伍中球手和主力的技术特点,让陪练员模拟其扣球角度、速度和高度[1],但人工陪练的模拟结果通常存在偏差,在这种背景下研制出了排球训练机器人,排球训练机器人可以准确的模拟扣球动作,为了获得良好的训练效果[2],提高排球运动员的水平,需要对排球机器人扣球位姿展开修正和控制。这一问题在运动智能化发展领域,一直是研究热点。
文献[3]首先分析了机器人在运动过程中的动力学,根据分析结果设计PI控制策略中的传递函数,采用PI控制策略对机器人的电机转速和电磁转矩展开控制,以此达到修正机器人位姿的目的。文献[4]将手眼相机固定在机器人末端,以此获取末端位姿,通过ELM神经网络对机器人位姿展开映射处理,使其接近预期值,完成位姿控制。
以上机器人姿态控制方法在应用到排球训练机器人的过程中,因为在控球位姿控制过程中需要多回路控制,不同控制回路之间相互影响,导致存在不同回路之间的耦合干扰。要获得良好的训练效果,需要对排球训练机器人在扣球训练过程中的位姿控制耦合干扰进行解耦控制。提出排球训练机器人扣球位姿修正解耦控制方法。通过姿态运动学和机器人动力学,分析排球训练机器人的运动状态,通过扩展卡尔曼滤波器估计排球训练机器人的位姿,求解排球训练机器人位姿控制目标函数,利用变步长动态平衡反馈调节方法完成修正解耦控制。
2 排球机器人姿态运动参数计算
将排球训练机器人分为机械臂和基体两个部分,对其展开运动参数计算。
设ξ0=[ξ,ξ0x,ξ0y,ξ0z]T为排球训练机器人扣球位姿修正控制的单位四元数。通过下式描述机器人基体在扣球训练过程中的运动参数[5]:
式中:ϕ0、ι0—四元数中存在的向量和标量;R—排球机器人的末端执行器;T—系统动能。
设GB=[ϕ0,ι0]为排球训练机器人基体上施加的力;JB代表基体在机器人运动过程中产生的惯性;JM表示机械臂在机器人系统中产生的惯性;vBM、vMB均代表的是速度独立项耦合矩阵,排球训练机器人动力学矩阵如下:
式中:vB—基体在机器人整体结构中的速度独立项耦合矩阵;JBM—耦合惯性矩阵;vM—基体在扣球训练过程中产生的速度独立项矩阵。
排球训练机器人扣球位姿修正解耦控制方法建立排球训练机器人运动参数计算的具体过程为:
2.1 主要能量
在微重力环境中,排球训练机器人不存在重力势能,系统动能T为机器人的主要能量[6]:
式中:Oi—连杆i在机器人系统中的惯性张量;
bi、qi—连杆i在机器人系统中的质心线速度向量和质量。
2.2 扣球速度独立非线性项
所提方法采用牛顿-欧拉逆动力迭代算法求解扣球速度独立非线性项v(σ,):
式中:GNE—牛顿-欧拉递推方程函数。
根据式(3)、式(4)计算机器人的主要能量和扣球速度独立非线性项,获取排球机器人姿态运动参数,为排球机器人扣球位姿修正解耦控制奠定基础。
3 扣球位姿修正解耦控制
得到排球机器人姿态运动参数后,建立排球训练机器人的状态方程,采用扩展卡尔曼滤波器估计排球训练机器人的位姿。在排球训练机器人的正运动学模型的基础上建立机器人的控制函数,修正扣球位姿,通过变步长动态平衡反馈法调节排球训练机器人的惯性参量,建立排球训练机器人在复合扰动控制下的解耦控制方程,实现解耦控制。
3.1 排球训练机器人位姿估计
排球训练机器人扣球位姿修正解耦控制方法,通过扩展卡尔曼滤波器[7-8]估计排球训练机器人的位姿。根据式(3)和式(4)建立排球训练机器人的状态方程:
式中:g(⋅)—状态值计算矩阵;g(T)—排球训练机器人在特定能量下对应的状态值;uk-1—排球训练机器人在k-1时刻的控制输入;ek-1—高斯白噪声,属于排球训练机器人系统中存在的动态噪声。
采用扩展卡尔曼滤波器估计排球训练机器人位姿时,需要对机器人在k时刻的状态值Xk展开离散化处理。线性化处理函数g,建立雅克比矩阵Gk在排球训练机器人系统方程中代入上述雅克比矩阵Gk,获得机器人系统线性化处理后的状态方程:
根据排球训练机器人的状态方程,采用卡尔曼滤波器预测排球训练机器人的位姿:
根据式(7)完成排球训练机器人的位姿估计。
3.2 解耦控制
根据卡尔曼滤波器估计的排球训练机器人位姿,在变步长动态平衡反馈调节的基础上,对排球训练机器人扣球位姿展开修正,完成解耦控制。
在排球训练机器人运动学方程中输入地面反作用力A0j(k-1/k-1)和杆质心的水平位移(k-1/k-1),利用卡尔曼滤波器获得排球训练机器人的状态估计j(k/k)以及其对应的协方差Pj(k/k),设qj表示k时刻排球训练机器人的正运动学模型,在此基础上建立机器人的控制函数z(k):
式中:Μj(k)—均值为0的正态分布;Dj(k)—排球训练机器人质心在步长变化情况下在水平方向产生的位移。在控制函数基础上,获得排球训练机器人适应地面环境的一对一校正输出yj(k)=P[qj(k)/z(k)]。
设qx、qy代表的是x轴和y轴对应的地磁场的分量,通过下式获取排球训练机器人的磁航向角ϕm:
根据上述过程获得的位姿估计值,建立排球训练机器人扣球位姿控制目标函数z(k)和约束参量模型x(k+1):
求解排球训练机器人位姿控制目标函数[9-10]时,根据机器人动力学设定耦合强度系数矩阵U、J、R。其中,矩阵U符合GˉTGˉ≤O,属于标准正态分布,针对空间姿态惯性力矩矩阵Gˉ,在扣球运动过程中满足,设定常数δ>0,排球训练机器人的雅克比矩阵此时符合Gk+δJJT+-1RRT<0。
排球训练机器人扣球位姿修正解耦控制方法,通过变步长动态平衡反馈调节方法,在上述分析的基础上,调节排球训练机器人的惯性参量。设定耦合强度系数Q={qi|i=1,2,…,q},以离散形式建立排球训练机器人位姿的观测方程z(k)和状态方程x(k+1):
式中:ci(k)—离心力矩阵;Γi(k)—排球训练机器人的状态向量;κi(k)—科氏力矩阵。
排球训练机器人在复合扰动控制下的解耦控制方程ΔBk如下:
式中:B—位姿控制律。
通过以上步骤,获取机器人的位姿和状态变化情况,结合变步长动态平衡反馈调节方法,建立在复合扰动控制下排球训练机器人的解耦控制方程,实现排球训练机器人扣球位姿修正解耦控制。
4 实验与分析
为了验证排球训练机器人扣球位姿修正解耦控制方法的整体有效性,需要对其展开测试。首先下载并安装MATLAB 里的Robotic机器人工具箱,对机器人进行位姿修正数据的传感器采集,然后编写机器人的运动速度和移动位置,输入到工具箱,通过调用相关函数验证程序的正确性。本次测试的排球训练机器人及参数设置,如图1、表1所示。在位姿修正控制过程中,需要获取排球训练机器人的运动信息,采用排球训练机器人扣球位姿修正解耦控制方法、文献[3]方法和文献[4]方法对排球训练机器人扣球的路线曲线展开跟踪,机器人扣球路线曲线跟踪结果,如图2所示。

表1 实验参数设置Tab.1 Experimental Parameter Setting

图1 排球训练机器人Fig.1 Volleyball Training Robot
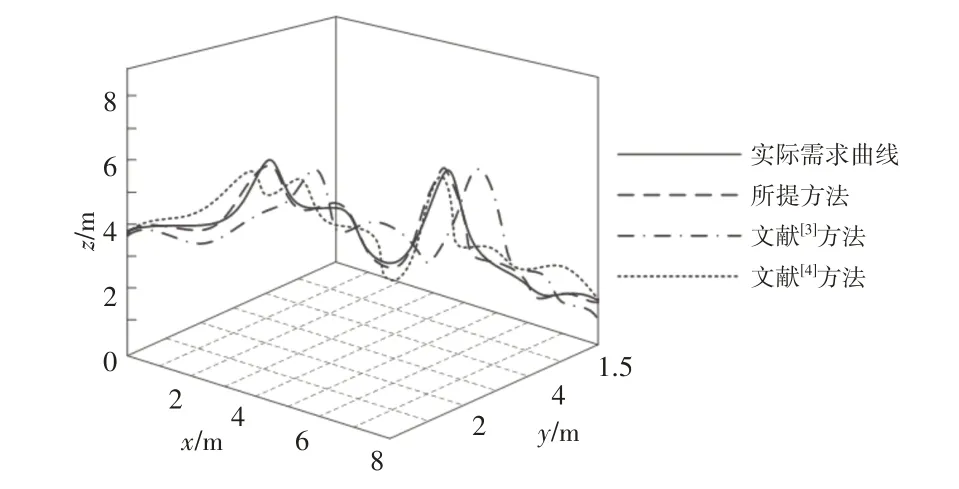
图2 机器人扣球路线曲线跟踪结果Fig.2 Robot Spiking Route Curve Tracking Results
由图2可知,所提方法的机器人质心跟踪曲线与实际需求曲线接近,文献[3]方法和文献[4]方法存在不同程度的跟踪误差。
分析三种方法的扣球位姿跟踪结果发现,z轴的跟踪误差相对较小。对三种方法扣球位姿在x轴和y轴的跟踪误差展开进一步分析,如图3所示。

图3 不同方法的扣球位姿跟踪误差Fig.3 Position and Attitude Tracking Error of Spike with Different Methods
分析图3可知,所提方法在x轴和y轴中的扣球位姿误差均低于0.3m,文献[3]方法在x轴和y轴中的扣球位姿误差最大,文献[4]方法x轴的扣球位姿误差在初始阶段较高,最后低于文献[3]方法。对比上述方法的测试结果可知,所提方法具有较小的扣球位姿误差。设定排球训练机器人在扣球过程中的期望俯仰角、关节旋转角度和加速度,采用所提方法、文献[3]方法和文献[4]方法对其展开控制,控制结果,如图4所示。由图4可知,采用所提方法对排球训练机器人扣球位姿控制时,获得的俯仰角、关节旋转角度和加速度变化曲线与设定期望值基本相符,其他两种方法的控制结果与期望值之间存在不同程度的误差,表明与其他两种方法相比,所提方法具有较高的位姿控制精度,因为所提方法在排球训练机器人解耦控制的基础上,采用卡尔曼滤波器对机器人的位姿展开估计,以此为依据对位姿展开修正和解耦控制,提高了所提方法的位姿控制精度。
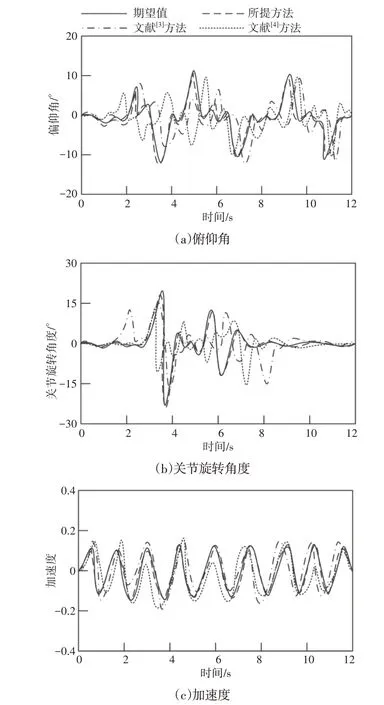
图4 不同方法的位姿控制结果Fig.4 Position and Attitude Control Results of Different Methods
5 结束语
提高排球训练机器人扣球位姿的精度,有利于提高排球运动员的训练效果。目前排球训练机器人扣球位姿控制方法存在跟踪精度低和位姿控制效果差的问题,提出排球训练机器人扣球位姿修正解耦控制方法,该方法首先计算了排球机器人姿态运动参数,估计机器人的位姿,在此基础上对机器人位姿展开修正和解耦控制。(1)所提方法的机器人质心跟踪曲线与实际需求曲线接近,跟踪误差最小。(2)所提方法在x轴和y轴中的扣球位姿误差均低于0.3m,扣球位姿误差最小。(3)所提方法的俯仰角、关节旋转角度和加速度变化曲线与期望值相符,具有良好的控制效果。该方法具有良好的控制性能,实现了排球训练机器人扣球位姿修正中的解耦控制,为提高我国排球水平提供了技术支持。