抓取机械臂的强度分析和优化设计
2024-02-29刘志海田绍鲁代振锐
刘志海,田绍鲁,代振锐,高 龙
(1.山东科技大学交通学院,山东 青岛 266590;2.山东科技大学机械电子工程学院,山东 青岛 266590)
1 引言
随着我国科技和教育事业的发展,越来越多的高校开展了和机器人相关的课程,传统的大型机器人带入课堂显然不太现实,这就促进了功能多样,体积适中的小型机器人的发展,而且此类机器人中以小型机械臂为主。为了避免因机械臂导致的安全事故,减少能源消耗,提高运行速度,对机械臂结构的分析和优化十分重要。
目前,针对机械机构的分析和优化主要采用有限元方法和拓扑优化方法。文献[1-2]运用有限元方法分别对矿用自卸车的货箱底板和驱动桥壳进行了力学分析,并对其结构参数进行优化得到质量更轻、性能优越的结构。文献[3-4]运用ANSYS软件分别对探测机器人的机械臂和煤炭取样机械臂的结构进行了分析优化,使其在满足强度刚度的前提下,质量更轻、承载能力更强。文献[5-6]采用有限元方法分别对立式加工中心和龙门加工中心的动静态特性进行分析,并建立响应面模型进行多目标优化,在降低变形量和提高固有频率的同时减轻了重量。文献[7]采用响应面法以质量、强度和固有频率为目标对振动式分选机的关键参数进行优化,降低了质量和应力并提高了三阶固有频率。文献[8]针对多目标拓扑优化问题,提出了一种新的优化方法,并用此方法对汽车悬架控制臂的结构进行优化设计,结果表明,优化后的控制臂质量更轻,性能更好。文献[9]运用NX软件对电动客车座椅支架进行有限元分析并基于结果进行变密度法的拓扑优化设计,优化后的结构质量更轻,应力集中和变形现象减小,实现了轻量化设计。
综合上述等人对机械结构的优化分析方法,为了避免发生安全事故、减少能源消耗和提高运行速度,以DOBOT Magician机器人的机械臂为研究对象,如图1所示。运用静力学分析方法、疲劳分析、灵敏度分析方法、响应面优化方法和拓扑优化方法对小臂结构进行优化设计。具体实施方法如下,建立小臂参数化模型,运用有限元软件Workbench对三组小臂模型进行静力学分析以确定危险工况,然后对危险工况下的小臂的结构参数进行灵敏度分析。基于分析,建立响应面模型对其结构参数进行优化,然后对优化后的结构进行拓扑优化得到最终的优化模型。最后,对优化模型和原始模型的变形、受力和疲劳情况进行对比,结果表明优化后的结构拥有更好的性能和更轻的质量。

图1 DOBOT Magician机械手Fig.1 DOBOT Magician Manipulator
2 Magician小臂的优化流程
桌用机械臂对精度和质量要求较高,因此提出了一种全面的优化设计方案,并运用Workbench实现对小臂模型的结构分析和优化设计,流程图,如图2所示。

图2 机械臂分析流程Fig.2 Robotic Arm Analysis Flow
3 Magician小臂的优化过程
3.1 Magician小臂有限元模型建立
DOBOT Magician小臂的材质为做T4时效处理的镁铝6061,其机械性能,如表1 所示。DOBOT Magician 的荷载量为1kg,有限元模型,如图3所示。
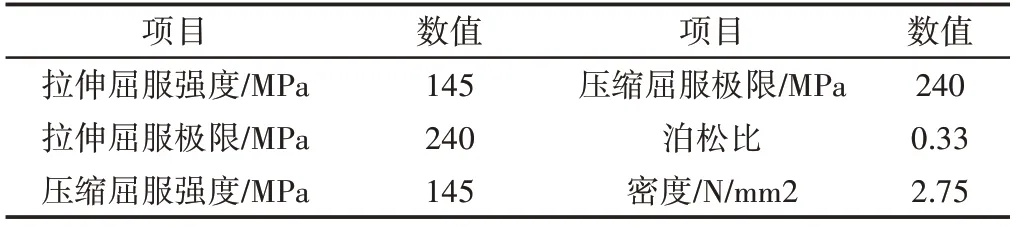
表1 6061-T4的机械性能Tab.1 Mechanical Properties of 6061-T4

图3 DOBOT Magician小臂有限元模型Fig.3 Finite Element Model of DOBOT Magician Forearm
3.2 结构分析
对于线性静态结构,位移{X}可以由下面的矩阵方程求出:
式中:[K]—一个常量矩阵;
{F}—加在模型上的恒定的不受惯性影响的力[10]。
设置三种工况互为对照以确定危险工况所在位置,三种工况分别是:30°位置、60°位置和90°位置。施加约束和外力后,三种工况的变形云图和应力云图,如图4、图5所示。弯曲刚度结果,如表2所示。
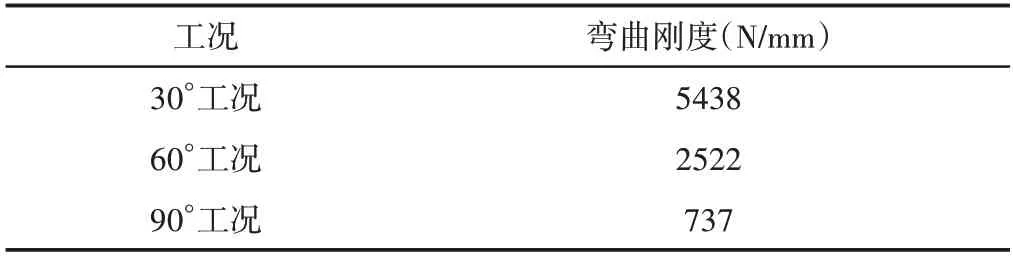
表2 各工况刚度Tab.2 Stiffness of Each Working Condition
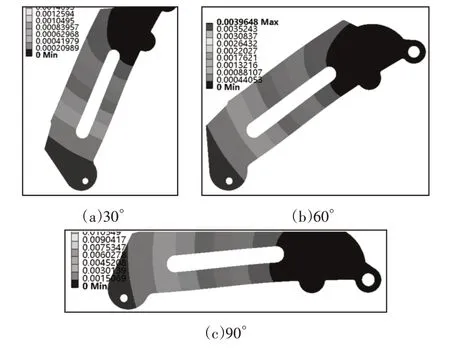
图4 变形云图Fig.4 Deformation Cloud Diagram
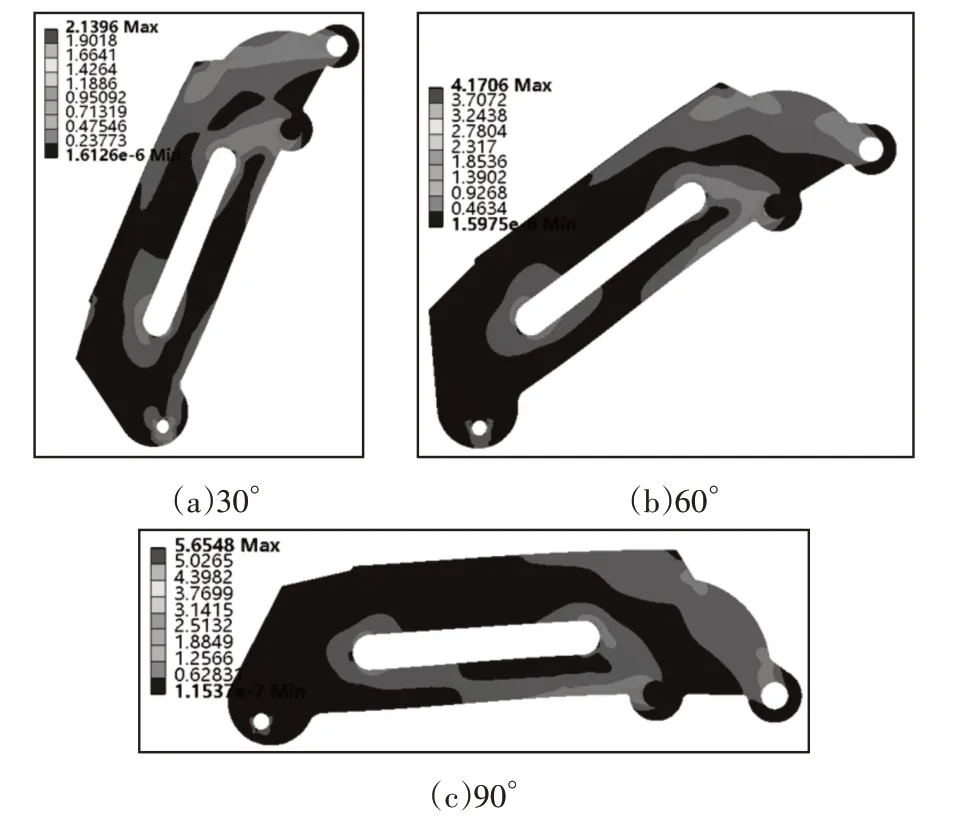
图5 应力云图Fig.5 Stress Nephogram
从图4、图5可以看出,随着角度的增大,模型的变形和应力也在增大,所以90°位置是机械臂工作的危险工况,以此工况为对象,进行疲劳分析研究,安全系数和疲劳敏感结果,如图6所示。从图6可以看出,结构的安全系数几乎全部为15(最大值),而且直到交变载荷幅值扩大到12倍时才出现循环次数下降的现象。从三种分析的结果可以看出机械臂的结构有很大设计余量,适合对其做轻量化设计。

图6 疲劳分析Fig.6 Fatigue Analysis
3.3 灵敏度分析
本次优化采用基于Spearman秩相关系数的灵敏度分析。其中Spearman 秩相关系数是衡量两个变量之间相关性大小的指标,该系数的值在1到-1之间,当两个变量呈现完全单调关系时,该系数的绝对值为1。在一个样本数为n的样本中,其Spearman秩相关系数为[11]:
式中:ρ—Spearman秩相关系数;x、y—需要求相关性的两个变量;n—样本数量、—变量的均值。ρ的正负代表了两个变量之间的正反比关系,而|ρ|则代表了两个参数之间的相关程度,即灵敏度[12]。
对机器人小臂进行灵敏度分析,主要分析的是小臂结构响应Y和小臂结构参数X之间的相关性情况。将结构最大变形、最大应力和总质量作为结构响应,将机械臂的主要参数作为结构变量,其中结构变量包含小臂的壁厚P9以及和P9相关联的变量P1、P3、P4,减重槽的宽度P5,减重槽长度P6,减重槽的位置参数P7和P8,各参数的变化范围,如表3所示。将响应和变量所包含的参数两两相组,组成数据对,对每对数据,利用式(2)求得其Spearman秩相关系数。

表3 DOBOT Magician小臂设计参数Tab.3 DOBOT Magician Design Parameters
分析的结果,如图7所示。其中,P10为质量,P11为变形,P12为应力。观察秩相关系数图可以知道,参数P6和参数P9对变形和质量的影响较大,因此以P6和P9作为优化参数进行后续研究。

图7 输入输出参数的Spearman秩相关系数Fig.7 Spearman Rank Correlation Coefficient of Input and Output Parameters
3.4 小臂结构的响应面优化
响应面分析法,即响应曲面设计方法(Response Surface Meth‐odology,RSM),是一种对数据进行拟合的数学模型,它通过一定的实验方法得到一定的数据,然后采用回归方程来拟合结构参数和结构响应值之间的函数关系,并从结构参数中选取最优值,使响应最优化。工程上常使用的是二阶响应面模型,对于n个变量,二阶响应模型为[13]:
式中:x—设计变量;a0、ai、aii、aij—拟合系数。
运用CCD(Central Composite Design)法进行实验设计,计算得到各实验点数据后,采用二阶响应面模型,对输入参数P6和P9以及输出参数质量、变形和应力进行分析。响应面分析结果,如图8所示。

图8 质量(a)、变形(b)、应力(c)的响应面分析图Fig.8 Response Surface Analysis of Mass(a),Deformation(b)and Stress(c)
对实验数据进行拟合,建立的完全二次多项式模型如下:
针对多个优化目标和优化参数的问题,综合考虑后,在上述响应面分析的基础上,采用多目标遗传算法(Multi-Objective Ge‐netic Algorithm,MOGA)进行进一步优化设计。其中,遗传算法是一种通过模拟自然选择、变异和遗传这一进化过程来搜索最优解的方法。以质量P10、最大变形量P11、最大应力值P12为目标函数,以减重槽长度P(6这里取为x1)和壁厚P(9这里取为x2)为设计变量,其数学模型如下:
式中:x—设计变量;
xil—设计变量的下限值;
xih—设计变量的上限值,上下限值,如表3所示;
m(x)—随设计变量变化的小臂质量;
δmax(x)—随设计变量变化的最大变形量;
σmax(x)—随设计变量变化的最大应力值。
计算得到候选结构及初始结构参数,如表4所示。对比三个候选点的参数,可以看出候选点1的质量最轻,候选点3的变形最小和最大应力值也最小,三个点的最大变形量和最大应力值均大于优化前的小臂,为保证机械臂使用安全性,选取候选点三的参数进行拓扑优化。

表4 候选结构及初始结构数据Tab.4 Candidate Structure and Initial Structure Data
3.5 小臂结构的拓扑优化
拓扑优化是一种在给定的载荷、约束等参数前提下搜索材料最优分布的方法,拓扑优化的优化方法有很多,采用变密度法对小臂结构进行拓扑优化,该方法通过不断地迭代计算,最终得到各单元对力传导的影响情况,保留对结构受力有用的单元,而删除没用的单元[14]。其数学模型如下:
式中:xi—设计变量,代表结构单元的相对密度,取值在[xmin,1]之间,当取xmin时表示删除该单元,取1时表示保留该单元,为避免总刚度矩阵奇异,取xmin=0.001[14];n为设计变量个数,即单元个数;K—结构总刚度阵;U—结构的位移向量;F—结构所受的外力向量;V—结构的体积;V*—优化后体积的上限值。
小臂的拓扑优化的结果及改进结构,如图9所示。

图9 拓扑优化结果及改进结构Fig.9 Topology Optimization Results and Improved Structure
图9中部分色区域为可去除的冗余区域,灰色区域是需要保留的必要部分,综合上述分析优化结果,对机械臂小臂结构进行改进。对图示小臂结构进行应力分析、变形分析和疲劳分析结果,如图10所示。其中,最大变形为0.0103mm,最大应力为4.46MPa,弯曲刚度为971N/mm,结构的安全系数全部为15,交变载荷幅值扩大到15倍时出现循环次数下降的现象。

图10 优化后模型的分析结果Fig.10 Analysis Diagram of the Optimized Model
4 结论
提出了一种针对机械结构进行优化设计的方案流程,并利用该方案对Magician机械臂进行轻量化设计。优化前的机械臂小臂质量为117.71g,优化后质量为79.13g,质量降低了32.8%;优化前机械臂小臂的最大应力值为5.65MPa,优化后最大应力值为4.46MPa,最大应力值降低了21.1%;优化前小臂的最大变形量为0.0136mm,优化后为0.0103mm,最大变形减小了24.3%;优化前弯曲刚度为737N/mm,优化后为971N/mm,弯曲刚度增大了31.8%;针对疲劳问题,优化前后外载荷循环次数均能达到1e+8次,而且优化后的结构抗疲劳性能更好。设计过程在保障机械臂强度、刚度、疲劳等机械性能的前提下,去除了冗余部分,更加有效的利用了材料,优化了应力集中的现象,实现了机械臂的轻量化。同时,为其他桌用机械臂等类似的机械结构的设计和优化提供了理论依据和方案参考。