一种曲臂结构多姿态调整及分析
2024-02-27孙荣武郑继平文晓林黄思培李明
孙荣武,郑继平,文晓林,黄思培,李明
(湖南星邦智能装备股份有限公司,长沙 410600)
0 引言
曲臂式高空作业平台以其能避开障碍物、场地适应性强的优点越来越受市场青睐。在曲臂结构静力学分析中,需要根据各种工况调整臂架及工作栏的姿态进行分析。在臂架姿态调整过程中,前处理工作量大、效率低下。钟志宏[1]对泵车多姿态分析进行了研究。孙武和[2]对泵车臂架结构有限元分析及参数化进行了相关探索。高旭宏等[3]对高空作业平台臂架进行了仿真计算。然而这些臂架姿态调整,都是建立在完整的网格模型基础上的,如果计划模型改变,则必须重新划分网格,对臂架连接进行重新定义,工作量大,较为繁琐。对于高空作业平台臂架多姿态工况快速调整的方法,鲜有文献记载。本文采用ANSYS Worbench软件平台,运用一种较简单的运动副关系驱动臂架调整姿态。仅需一次性定义连接关系、网格划分和接触定义,即可完成所有臂架姿态的分析计算。即使三维模型改变,也无需重新定义部件之间的连接,极大提升了工作效率。
1 AB18EJ曲臂结构及工况分析
AB18EJ曲臂最大平台高度为18 m。曲臂结构如图1所示。折臂油缸8驱动折臂的伸展,主臂油缸15驱动主臂架的变幅,伸缩臂4与基本臂5之间有伸缩油缸,伸缩臂可以在基本臂中实现伸缩,上调平油缸7控制工作栏1保持水平姿态。马达2控制工作栏回转。
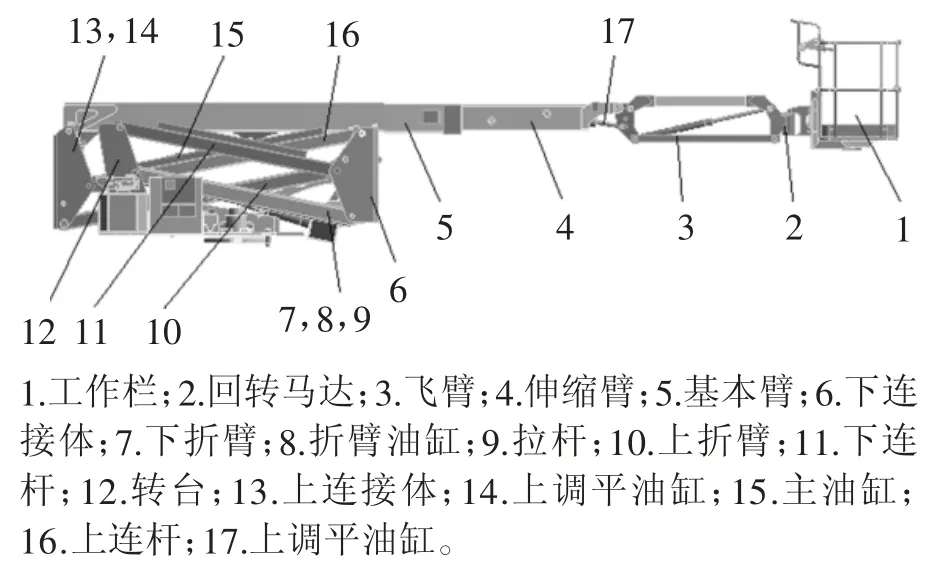
图1 AB18EJ曲臂结构
进行静力学分析,基本工况如表1所示,各工况的臂架姿态如图2所示。
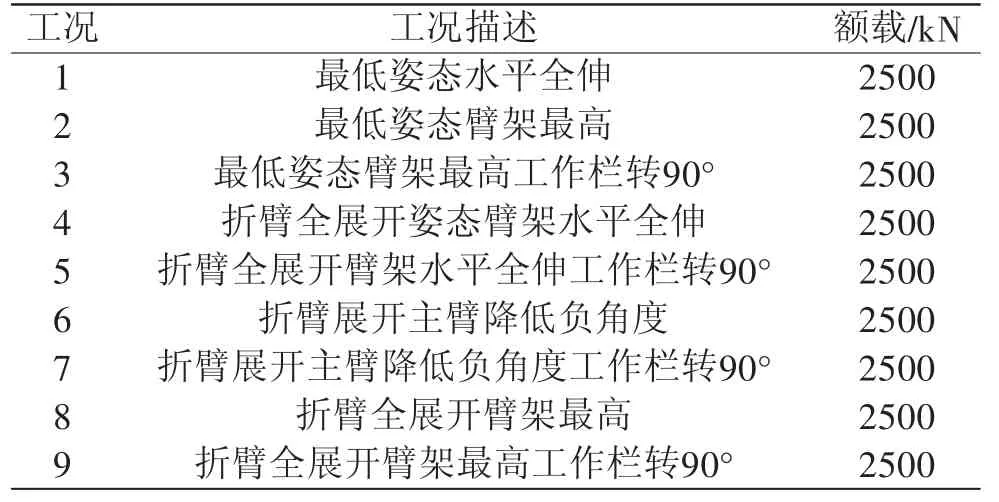
表1 曲臂基本工况
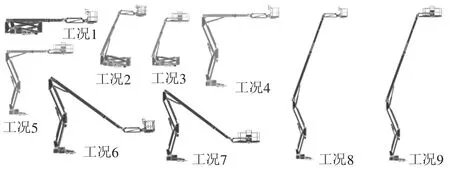
图2 各种工况的臂架姿态图
2 结构有限元分析
2.1 材料定义
臂架材料选取HG70,销轴材料选取42CrMo,轴套材料选取Q500D,轴承材料选取复合材料。材料的力学性能如表2所示。
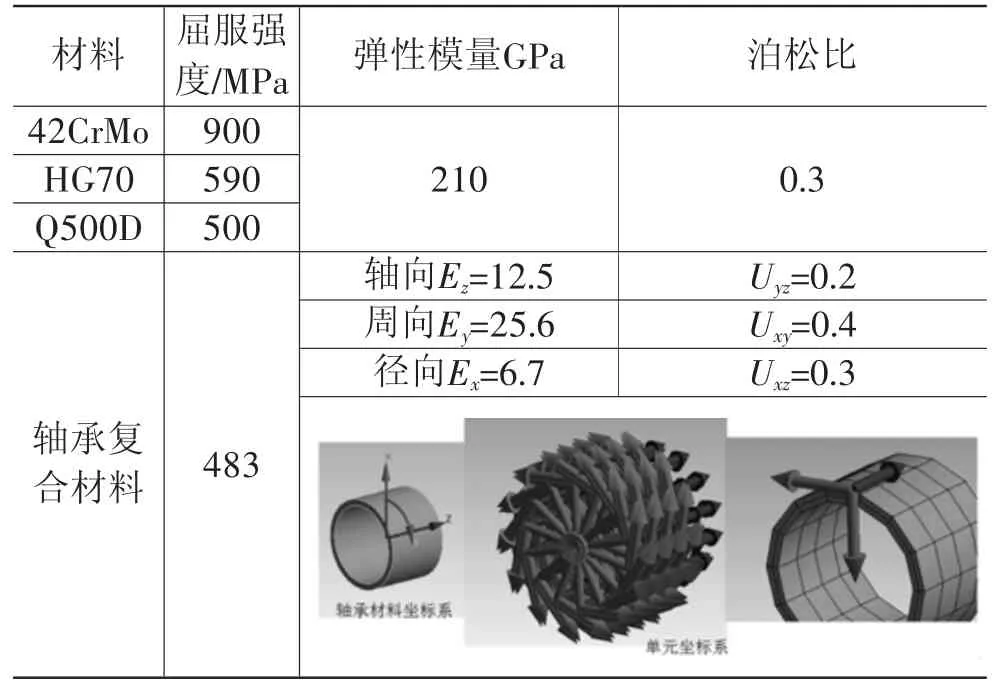
表2 材料属性
2.2 臂架姿态调整
2.2.1 臂架结构建立接触及连接
对三维模型局部作简化处理后导入ANSYS Workbench 仿真平台的Mechanical环境中。对臂架各部分定义nameselection (命名选择),每个nameselection中代表一类部件,例如“上连接体”中就包含上连接体总成的所有零件,“内滑块”中包含伸缩臂后面的滑块,“外滑块”中包含基本臂前部的滑块,“shafts”中包含所有的轴,“bearings”包含所有的轴承,还可以将2个及2个以上的nameselection进行合并操作,将“shafts”、“bearings”合并成“shafts&bearings”,便于选择部件,如图3(a)所示。根据命名选择定义接触,部件内部为绑定接触,如图3(b)所示。如果各部件之间有相对滑动,则定义接触为摩擦接触。转台、油缸、折臂、连杆、连接体臂架之间是通过销轴与轴承连接,将销轴与轴承之间的接触定义为摩擦接触。伸缩臂与基本臂之间通过滑块实现伸缩,如果滑块与伸缩臂之间存在相对移动,则接触状态为摩擦接触。定义接触以后,再定义各部件之间的连接,如果部件之间有相对转动,则定义为revolute, 例如轴与轴承之间的连接为revolute。如果部件之间有相对移动,则定义为Translational。例如油缸筒与油缸杆之间及滑块与伸缩臂之间定义为Translational。基本臂与转台之间定义为general,释放6个自由度,便于臂架在升降和旋转过程中根据不同的自由度调整姿态。如图3(c)所示,将定义的连接组合在一起命名为“姿态调整”。
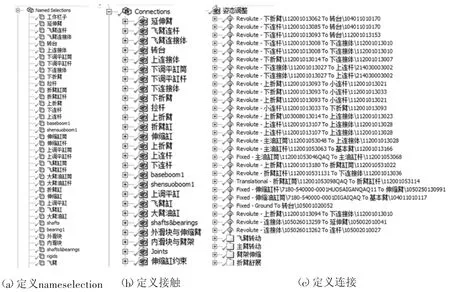
图3 定义命名选择、接触和连接
2.2.2 臂架姿态调整
采用Mechanical环境下的“Configure”配置按钮,可以使运动副按照参考坐标系沿着某自由自由度方向运动[4]。使用这个功能可以调整臂架到任意姿态。具体操作步骤是:选择运动副,点击菜单栏中的“Configure”按钮,在文本框中输入位移数值或角度数值,即可驱动运动副动作。将需要调整姿态的运动副组建成一个Group(组),重新命名标记,如“臂架转动”“飞臂转动”“臂架升高”“臂架伸出”等,在功能上进行区分,如图4所示。例如,要从姿态一调整到姿态二:第一步,打开臂架升高文件夹,点击连接副,点击主菜单“Configure”按钮,输入高度值6500,点击“Configure”,臂架就升高到指定位置;第二步,打开臂架伸出文件夹,选择运动副点击主菜单中“Configure”按钮,输入1000,点击“Configure”臂架,就可完成伸出动作;第三步,打开“臂架转动”文件夹,选择运动副,将臂架向顺时针转37°。打开“飞臂转动”文件夹,选择运动副,将飞臂逆时针转37°。选择工作栏与马达之间的运动副,将工作栏顺时针90°。姿态调整完成以后,将“姿态调整”组合抑制。然后划分网格,将网格划分方法及尺寸设置完成以后,可以重新调整姿态,无需重新设置网格划分参数。如果三维模型需要修改时,只需点击“Revert”按钮,将臂架姿态恢复到原始状态,在数模处理软件中修改三维模型以后,返回到Mechanincal环境中,所有连接设置仍然可以继续使用。此次定义的连接都放置“姿态调整”组合中,仅用于调整姿态,不参与计算,所以计算时须抑制。

图4 臂架姿态调整
曲臂计算有9种典型工况,静力学分析必须调整9种姿态。采用姿态调整的方法,快速完成9种姿态的调整。然后点击Workbench中的Update Project就可以完成所有工况的计算。
2.3 臂架网格划分
对板材采用实体-壳单元“SOLSH190”划分两层网格,对可规则的实体部分,采用实体单元“SOLID186”划分规则的六面体网格。不规则单元采用高阶单元划分成四面体网格。采用坐标系为总体笛卡尔坐标系。有限元模型如图5所示。

图5 有限元模型
2.4 约束方式和载荷计算
约束及载荷:约束转台与回转支承结合面。对整体结构施加重力,在工作栏中施加远程力2500 N模拟额定载荷,施加远程力400 N模拟操作力,操作力方向为倾翻力矩最大的方向。臂架侧面施加10-4MPa压力模拟风载荷。在下调平油缸与下调平油缸筒之间建立移动副,施加Jointload,如图6所示。采用姿态调整的方法,将所有工况的臂架姿态调整完成。然后抑制“姿态调整”组中的连接。

图6 臂架的约束及载荷
2.5 有限元计算
2.5.1 静力学分析
主结构计算按线弹性结构进行,有限元的基本方程为
式中:K为整体刚度矩阵;δ为节点位移列阵;F为节点载荷矩阵。
利用边界条件,结合以上方程可以求出各节点的位移及各单元应力等[5]。
对于结构的静强度分析,采用第四强度理论进行校核,米塞斯等效应力(Von-Mises)即σeqv应满足以下条件:
式中:σeqv为等效应力,σ1、σ2、σ3分别为第1、2、3主应力,[σ]为许用应力强度。
2.5.2 接触计算
滑块与伸缩臂及轴与轴承之间,轴与孔之间的接触部分的计算为非线性问题,按照接触算法进行校核。ANSYS中提供了罚函数法(Pure Penalty)、拉格朗日算法(Normal Lagrange)、增广拉格朗日算法(Augmented Lagrange),通过执行强制协调进行接触计算[6-7]。本计算采用增广拉格朗日法进行接触计算。接触探测(Detection Method)有高斯积分点探测(On Gauss Points),一般比节点探测更准确;拉格朗日和MPC法默认是基于节点探测(On Nodes-Normal from Contact和On Nodes-Normal to Target), 比高斯积分的探测点少[7]。对于有尖角与平面的接触必须采用节点探测。所有探测方法的目的是尽量探测到接触,形成接触单元,减少渗透[8]。本计算采用高斯积分点探测。为了使探测到的高斯积分点更多,接触行为设置为对称接触,更易于收敛。在定义接触时,可添加命令流,改善计算的收敛性。命令流为:keyopt,cid,n,value。其中:keyopt为关键字,cid为接触编号,n为关键字的序号,value为关键字的数值。ANSYS接触单元有丰富的关键字和实常数,可以模拟工程中所需要的接触类型及接触参数[9]。
3 计算结果及分析
3.1 曲臂结构强度分析
如图7、图8所示,以工况1为例对强度进行分析。基本臂应力为297.91 MPa,伸缩臂应力为229.97 MPa,臂架强度满足要求;上连接体应力为356.64 MPa,为压应力,强度满足要求;下连接体应力为430.71 MPa,区域很小,强度满足要求;上连杆应力为253.65 MPa,下连杆应力为259.52 MPa,拉杆应力为307.08 MPa,在轴上,连杆强度满足要求;下折臂为453.74 MPa,局部受压区域很小,强度满足要求,上折臂应力为357 MPa,均在轴套局部受压位置,强度满足要求;转台应力为299.23 MPa,强度满足要求。对其余8种工况进行静力学分析,下折臂轴套局部应力集中,为压力,强度均满足要求。

图7 主臂架及转台应力云图
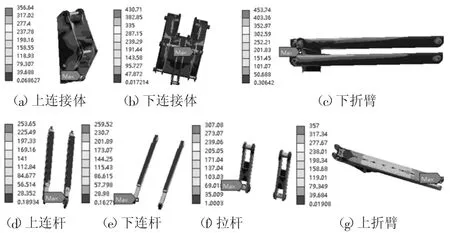
图8 折臂应力云图
3.2 曲臂结构的变形分析
对臂架的9种工况进行分析,对工作栏侧转90°工况,校核臂架侧向位移。臂架变形如表3所示。臂架最大综合位移为544.4 mm,最大侧向位移为201 mm,整体刚度和侧向刚度满足要求。

表3 臂架分析结果
4 结论
1)采用多姿态调整的方法,快速完成9种工况姿态的调整。经分析,曲臂各部分强度和刚度满足设计要求。2)采用姿态调整方法仅需一次有限元前处理设置,提高前处理效率。此方法对于多姿态工况分析有借鉴意义。3)该姿态调整的方法尚有不足,需要对软件进行二次开发,将其固化到软件界面上,使人机交互性更好、更高效。