考虑桨距角控制的双馈风电机组高电压穿越控制策略
2024-02-22苏剑涛冯昊郑泽名王健蔡婷婷
苏剑涛, 冯昊, 郑泽名, 王健, 蔡婷婷
〔1.国家能源集团龙源风电工程技术公司,北京 100089;2.现代电力系统仿真控制与绿色电能新技术教育部重点实验室(东北电力大学),吉林 吉林 132012〕
0 引 言
为了保障大规模风电联网后电力系统的安全运行,风电机组必须具备高电压穿越(high voltage ride through,HVRT)能力。因此,风电机组的HVRT方法受到了广泛关注[1]。
双馈风电机组是风电采用的主力机组之一。目前,双馈风电机组的HVRT方法主要包括两类:基于增加额外硬件设备的方法和基于改进机组控制策略的方法。前者在HVRT期间,利用无功补偿设备为电网提供无功支撑,或者利用限流设备抑制电压骤升引起的双馈感应发电机(doubly-fed induction generator,DFIG) 过电压和过电流[2]。此类方法适用范围较广,但会增加运行成本。
基于改进机组控制策略的方法通过完善风电机组的控制策略,抑制电压骤升引起的DFIG过电压和过电流。文献[3]根据定子电流对转子电压进行补偿,以抵消转子暂态感应电动势。该方法实现较为容易,但对于电压骤升较深的情况效果不理想。文献[4]将电压骤升后的暂态过程用时间更短的多个稳态过程代替,以降低转子过电流的峰值。该方法控制精度较高,但控制较为复杂。
基于改进机组控制策略的方法避免了额外硬件设备的投资,但未考虑DFIG转子转速限制,使得对于持续时间较长的电压骤升,HVRT期间风电机组存在因DFIG转子转速越限而发生超速脱网的风险。
本文提出一种考虑桨距角控制的HVRT控制策略。HVRT期间,当DFIG转子转速过高时,通过控制桨距角降低转子转速,以避免风电机组发生超速脱网。基于某型号1.5 MW双馈风电机组的HVRT仿真模型,对所提控制策略的有效性进行了仿真验证。
1 双馈风电机组数学模型
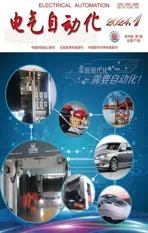
双馈风电机组主要由风力机、DFIG、转子侧变流器(rotor-side converter,RSC)、电网侧变流器(grid-side converter,GSC)和主动式crowbar保护等部分构成,结构示意图见图1。
图1 双馈风电机组联网系统结构图
忽略DFIG定子电阻Rs,dq同步旋转坐标系下,DFIG的功率方程为[5]2773:
(1)
式中:*为标幺值;Ps、Qs分别为DFIG定子输出的有功功率和无功功率;U1为定子相电压有效值;isd、isq分别为定子电流的d、q轴分量;SN为风电机组额定容量;Lm为定、转子之间互感;Lsl为定子自感;ird、irq分别为转子电流的d、q轴分量;ω1为同步角速度。
DFIG转子运动方程为:
(2)
式中:Ωr为DFIG转子机械角速度;Tj为惯性时间常数;Ω1为同步机械角速度;Tm为风力机输出至DFIG的机械转矩;Te为DFIG电磁转矩。
Tm表达式为:
(3)
式中:ρ为空气密度;R为风力机叶片半径;A为风力机叶片扫掠面积;Cp(λ,β)为风能利用系数;λ为叶尖速比;β为桨距角;VW为风速。
Cp(λ,β)表达式详见文献[6],本文不再赘述。
β控制框图见图2。图2中:Ωrref为Ωr参考值;βref为β参考值;τ为伺服系统的动作延时;dβ/dt为变桨速率(一般dβ/dt≤10°/s[7])。

图2 β控制框图
正常运行时β=0°以实现最大风能捕获。当β增大时,Cp(λ,β)减小,从而Tm减小,Ωr降低;当β减小时,Cp(λ,β)增大,从而Tm增大,Ωr升高。
2 考虑桨距角控制的HVRT方案

基于上述分析,根据文献[8],本文采取如下HVRT方案。
(1) 当电网电压骤升引起转子电流达到icbset时,投入crowbar保护,同时封锁RSC控制脉冲。风电机组进入HVRT过程。本文取icbset=1.9IrN(IrN为转子额定电流)。
(2) HVRT期间,当转子三相电流瞬时值均不大于crowbar保护退出值,icbback并持续20 ms时,退出crowbar保护,同时重新启动RSC。本文取icbback=1.7IrN。
(3) RSC重新启动后,优先控制DFIG输出的无功功率,对电网提供一定无功支撑。在此基础上,如果RSC容量有盈余,再控制DFIG输出一定有功功率。
(4)
(5)
式中:IN为定子额定相电流。
(6)


(7)
(4) HVRT期间,一旦Ωr>Ωrref,则增大β,以降低Ωr。图2中,本文取Ωrref为相应风速下DFIG的最优转速,dβ/dt=5°/s。
3 仿真分析
基于PSCAD/EMTDC软件,搭建了某型号1.5 MW双馈风电机组联网运行仿真模型,对本文所提HVRT控制策略和只进行无功支撑(不控制β)的HVRT控制策略进行仿真对比分析,仿真接线图见图1。
3.1 仿真参数
仿真所用设备的主要参数见表1。
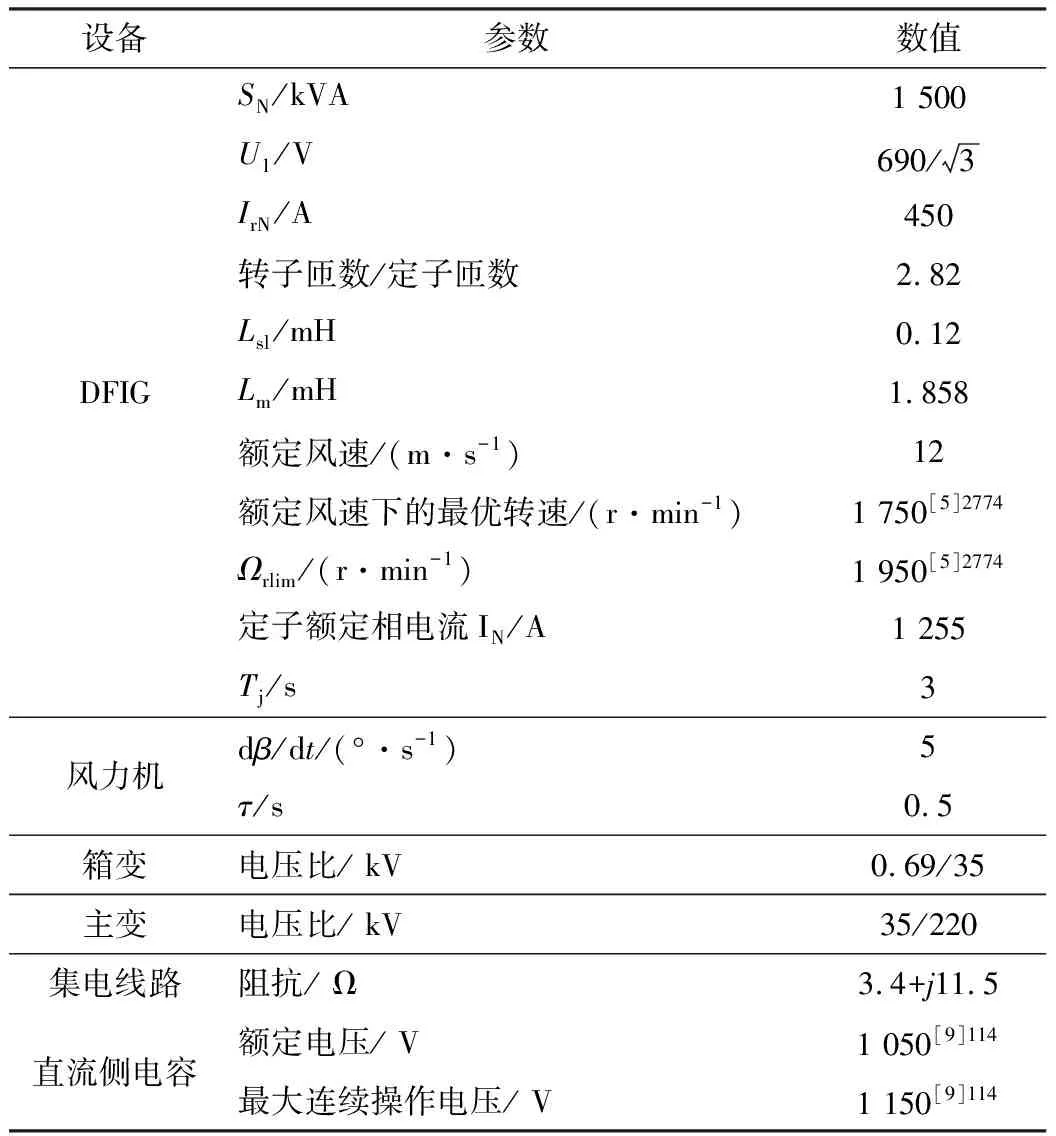
表1 仿真所用设备的主要参数
由表1可得:icbset=1.9IrN=855 A,icbback=1.7IrN=765 A。
电压骤升前,风电机组运行于额定风速。由表1可知,Ωrref=1 750 r/min。当t=0.6 s时,图1中电网发生对称故障,引起U1骤升。根据文献[8],设置U1骤升至1.17 p.u.,故障持续时间为10 s。
3.2 仿真结果分析
采用只进行无功支撑的控制策略和本文所提控制策略,仿真波形分别见图3和图4。

图3 只进行无功支撑控制策略仿真波形
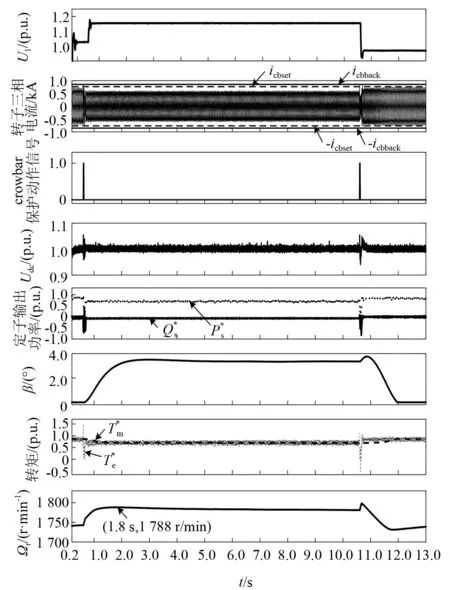
图4 本文所提控制策略仿真波形

4 结束语
本文提出一种考虑桨距角控制的双馈风电机组HVRT控制策略,推导了HVRT期间RSC重启后,DFIG无功电流和有功电流参考值的表达式。在此基础上,通过RSC控制DFIG对电网提供无功支撑,同时通过控制桨距角降低DFIG转子转速。仿真结果表明,双馈风电机组HVRT期间在对电网提供无功支撑的同时,还需要限制转子转速,否则风电机组存在超速脱网风险。HVRT期间增大桨距角可以降低DFIG转子转速,使双馈风电机组在避免超速脱网的情况下实现HVRT。