基于一致性理论的主动配电网分层分区经济性协调控制研究
2024-02-22张雪莹曾强陈腾生
张雪莹, 曾强, 陈腾生
(1. 广东电网有限责任公司,广东 广州 510000;2. 广东顺德电力设计院有限公司,广东 佛山 528300)
0 引 言
主动配电网(active distribution network, ADN)具备对各种分布式电源的主动管理能力,同时关注各区域的内部优化控制和区域间的全局协调,通过柔性负荷等可调单元以及多层次电网的分层消纳能力平衡间歇式能源的随机波动[1]。考虑到风力和光伏等可再生能源出力具有随机性、间歇性与波动性的特点,ADN无法对各个时间断面进行实时优化计算,分层分区协调控制技术是消除主动配电网调度值与实测值的偏差并快速协调优化各可调单元状态的常用手段。
目前,ADN分层分区协调控制分为全局协调与区域自治两部分。当前面向全局协调的研究主要以馈线功率误差控制[2]为基础,将主馈线出口功率的实际值和由配电网预测数据优化计算得到的期望值之间产生的不平衡功率分配给各个自治区域。区域接收交换功率指令后,以该指令为约束进行区内的协调自治,其采用的自治优化算法是现有研究的焦点。文献[3]在区内自治采用优先顺序法对分布式能源出力进行调整,具有较快的响应速度。文献[4]将直流最优潮流计算应用到自治域的内部优化中,在不增加较多调节时间的前提下实现了初步的优化控制。多智能体系统近年来被广泛用于解决多独立可调单元的协调控制问题,是改善ADN协调控制的可行方法[5-9],具有兼顾控制过程响应速度与优化效果的显著优势。文献[10-11]根据预测数据的优化结果制定激励信号,引导各个Agent主动响应,各层次Agent的自治性允许设备异步调节自身运行状态,具有灵活的协调优化能力。上述研究均采用集中优化方式,在全局协调阶段由ADN全局控制中心算得区域间的有功分配结果,并在区域自治阶段交由各个区域控制中心进一步完成特定的区内优化算法。不同于集中优化方式,文献[12]在区域自治策略中利用一致性控制在分布式优化控制上的优势,基于等耗量微增率准则实现区域内的有功经济分配以及自治控制的无中心化,提高了控制的实时性与最优性。
综上,借助多智能体技术,现有研究在ADN区域自治实时优化方面从简单集中优化方式逐步过渡到完全分布式优化。但在全局协调方面,仍然以馈线功率误差为目标,按诸如区域备用调节容量等可靠性指标将不平衡功率按比例分配给各个自治区域,缺乏对ADN整体经济性的考虑。因此,本文提出一种基于一致性理论的ADN分层分区经济性协调控制方法。以经济效益最大化为整体优化目标,拟利用等微增率准则实现上层模型中区域间最优协调与下层模型中各区域内部自治优化控制,通过构建双层多智能体系统以及各智能体的等效电源模型,以实现同级各等效电源成本微增率一致为目标完成ADN自上而下的有功经济分配,结合IEEE 33节点进行仿真分析,验证提出控制方式的有效性。
1 ADN分层分区一致性模型
1.1 智能体等效电源模型
双层多智能体系统由区域级智能体和设备级智能体构成,分别代表各自治区域和以可控负荷、可调分布式能源为主的各类可控单元,如图1所示。图1中:区域级智能体是ADN的自治区域,用于获取ADN下发的调度命令,完成不平衡功率在各个区域间的最优协调;设备级智能体是以可控负荷为代表的各类可控单元,由所属区域级智能体分区管理,根据区域给定的功率需求直接对分布式电源进行优化控制。
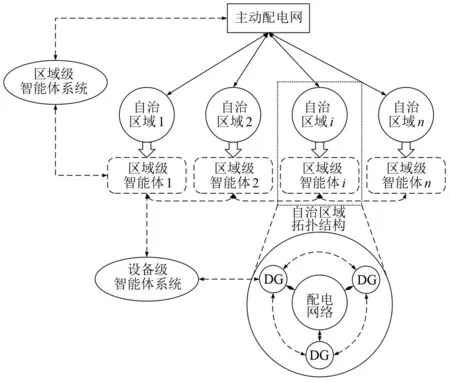
图1 双层多智能体一致性协调控制架构
区域级智能体和设备级智能体均可建模成相应的等效电源,机组发电成本计算公式如下。
(1)
式中:Fi为第i个发电机组的成本函数;PG.i(t)为第i个发电机组在t时刻的有功功率出力;ai、bi、ci为相应的成本系数。式(2)为对应的成本微增率函数。
(2)
对于自治区域,其等效电源的成本函数可以表示为:
(3)
(4)
对于可控负荷,可以建模为有功出力为负的等效电源。可调分布式能源亦可等效为具有一定爬坡约束的等效电源[13]。据此,可以直接用式(1)和式(2)分别表示这类可控单元的等效发电成本和成本微增率。
1.2 等效电源成本微增率一致性控制
对于各级智能体,采用一阶离散控制方式,其状态方程由式(5)给出。
C(t)=C(t-1)+u(t)
(5)
式中:C(t)、u(t)分别为该智能体的状态变量和控制变量。一致性控制的目的就是将多个相互关联的智能体的状态变量C(t)通过u(t)对应的协调控制率调整到一致。本文中,状态变量C(t)即发电成本微增率,用邻接矩阵A=[aij]n×n来描述智能体间通信拓扑的连接关系,其中:n为智能体的个数;aij为由第j个区域指向第i个区域的边的权值,对角线元素aii=0。可以写出对应的Laplacian矩阵L=[lij]n×n,其中:
(6)
对于某个智能体i,记其在t时刻的状态为Ci(t)∈R,设置智能体间的协调控制律为:
C(t+1)=C(t)-LC(t-τ)
(7)
式中:C(t)=[C1(t),C2(t),…,Cn(t)]T;τ为控制时延。τ=Tij=Ti。式中:Tij为智能体j到智能体i的通信时延;Ti为智能体i自身的输入时延。在该协调控制律下,各智能体的状态转移只与其他具有邻接关系的智能体在τ时间之前的状态有关。
可以证明,当系统网络拓扑为静态有向加权图,且含有一个全局可达节点,若式(8)成立,则系统能够实现渐进一致。
(8)
据此,在通信拓扑满足条件下,可以将Laplacian矩阵设计如式(9)所示。
(9)

2 基于一致性理论的ADN分区协调控制算法
2.1 基于一致性理论的ADN全局协调算法
ADN的全局协调算法由区域级智能体系统执行,主要根据调度数值和实测数据的偏差,以维持主馈线出口功率不变为目标,将不平衡功率按一定规则分配给各个功率可调单元,以实现整个配电网的功率平衡。本文利用有功经济分配方法实现该不平衡功率的经济分配,其规划模型如式(10)所示。
(10)

(11)
在不考虑等效电源有功出力约束的情况下,可以列出全局协调下的有功经济分配计算模型,如式(12)所示。
(12)
式(12)的第一条等式可以通过一致性控制方法实现,但第二条等式将影响有功功率的实际分配。考虑对不平衡功率的消纳,发电成本微增率更新规则修改为式(13)。在成本微增率的一致性计算结束时,式(13)最右边的功率不平衡量趋于零,能够满足全局协调阶段的整体有功经济分配。
(13)
需要说明的是:当某个区域的等效电源超出其有功出力的限值时,要将该区域的有功出力保持为该限定值,并将该区域从一致性控制算法中移除,剩余区域需要重新生成Laplacian矩阵并继续完成对状态变量一致性调节,相关的调整方法将在下节类似问题中一并描述。
2.2 基于一致性理论的自治区域内部协调算法
区域内部协调算法由设备级智能体系统执行,实现自治区域内的有功经济分配。本文只考虑并网状态下区域的自治算法。自治区域一般包含一或多个功率可调单元,常包含风力发电和光伏发电等分布式能源,主要根据全局协调层下发给区域的交换功率指令,进一步完成区域内部各个分布式能源的优化控制。
式(14)给出了第k个区域在t时刻的自治优化模型。
(14)

与全局协调算法类似,可以写出区域内有功经济分配的协调控制率,如式(15)所示。

(15)
当某个分布式电源的爬坡率越限后,需要将其取为该限值,以保证设备的安全稳定运行。由式(15)可见,Laplacian矩阵L决定了各电源微增率的状态转移速率,当出现爬坡率越限时,可以依照式(16)对L作微调,其中α为调节系数,对L的调整过程直到爬坡率不再越限才结束。
(16)
当存在分布式电源的有功出力越限后,该电源以该限值为实际出力,并退出一致性控制。对于式(15)的第一条等式,需要删除该分布式电源对应的那一行,对于Laplacian矩阵L则需要根据移除该电源后的通信拓扑重新生成,此时协调控制率更改为式(17)。
(17)
式中:j∉Lim为电源j的有功出力未达到限值。另外,对于不可调度单元,亦可视为功率受限的等效电源,仍然采用式(17)进行相应的一致性控制。
3 仿真分析
3.1 仿真算例
本文以IEEE 33节点模型[14]作为ADN的基础模型,修改主馈线出口功率限值为(0,0.5] (单位:MW),忽略支路潮流约束,并选取13、14、23、24、29、30和32号节点为分布式电源(distributed generation,DG)的接入点,具体数据由表1给出。为适应配电网运行方式的变化,选取含有DG的馈线上相邻两联络开关间的区域作为一个自治区域。图2为本文采用的仿真拓扑,其中虚线为联络开关,点线为划定的自治区域。通信拓扑独立于配电网拓扑,不受配电网拓扑变化影响,在实际的仿真计算中,配电网只采用开环运行方式进行算例验证,即保持所有联络开关为断开状态,网络变化主要由负荷与间歇式能源等不可调度单元引起。
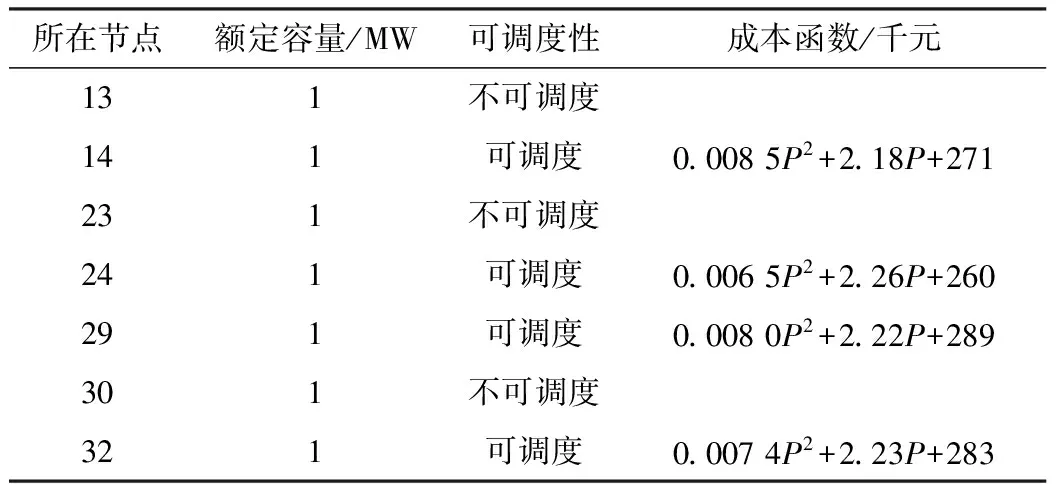
表1 AND拓扑中的DG信息
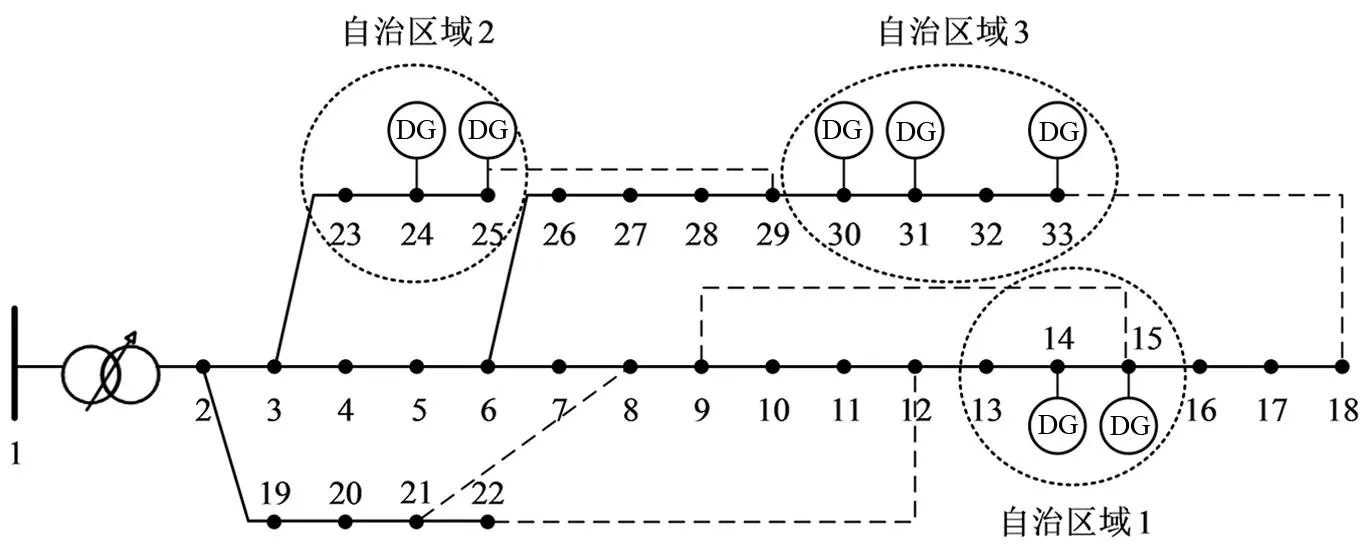
图2 33节点ADN仿真拓扑
3.2 ADN的全局协调算法仿真分析
ADN的全局协调由区域级智能体系统负责,实现区域间的有功经济分配。各区域的等效电源信息计算结果见表2。
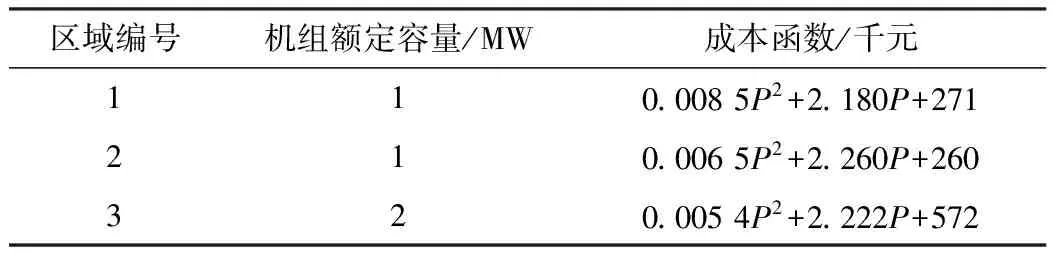
表2 各区域的等效电源信息
图3为区域级智能体的一致性控制过程,各区域等效电源能够较快达到成本微增率一致,并在连续网络变化状态下能够始终维持成本微增率的一致性。
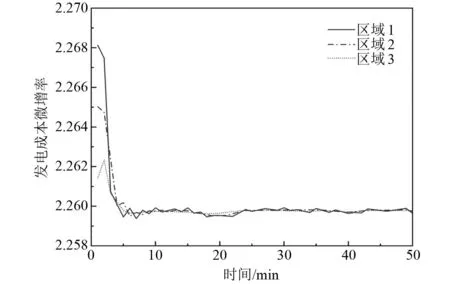
图3 区域级智能体系统一致性控制过程
表3给出其仿真结果数据。

表3 全局协调仿真结果
3.3 自治区域的内部协调算法仿真分析
自治区域的内部协调算法由设备级智能体系统负责,实现自治区域内的有功经济分配。各自治区域的仿真结果见表4。其中,区域3包含2台可调度设备,其协调过程见图4。各机组发电微增率能够较快达到一致,可实现其区域内的有功经济分配。
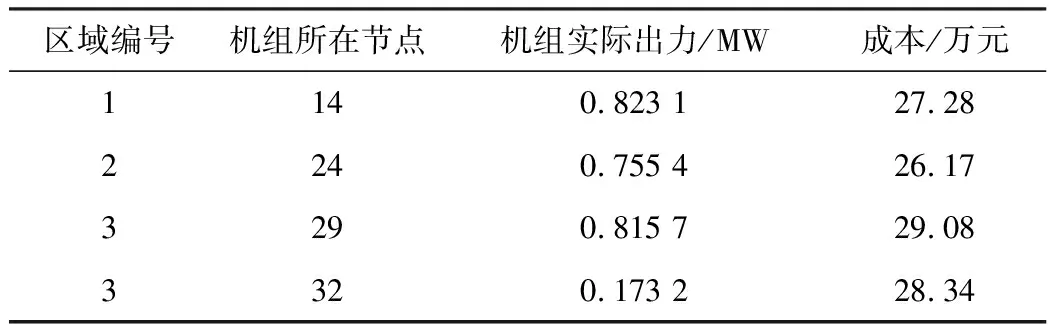
表4 自治区域仿真数据
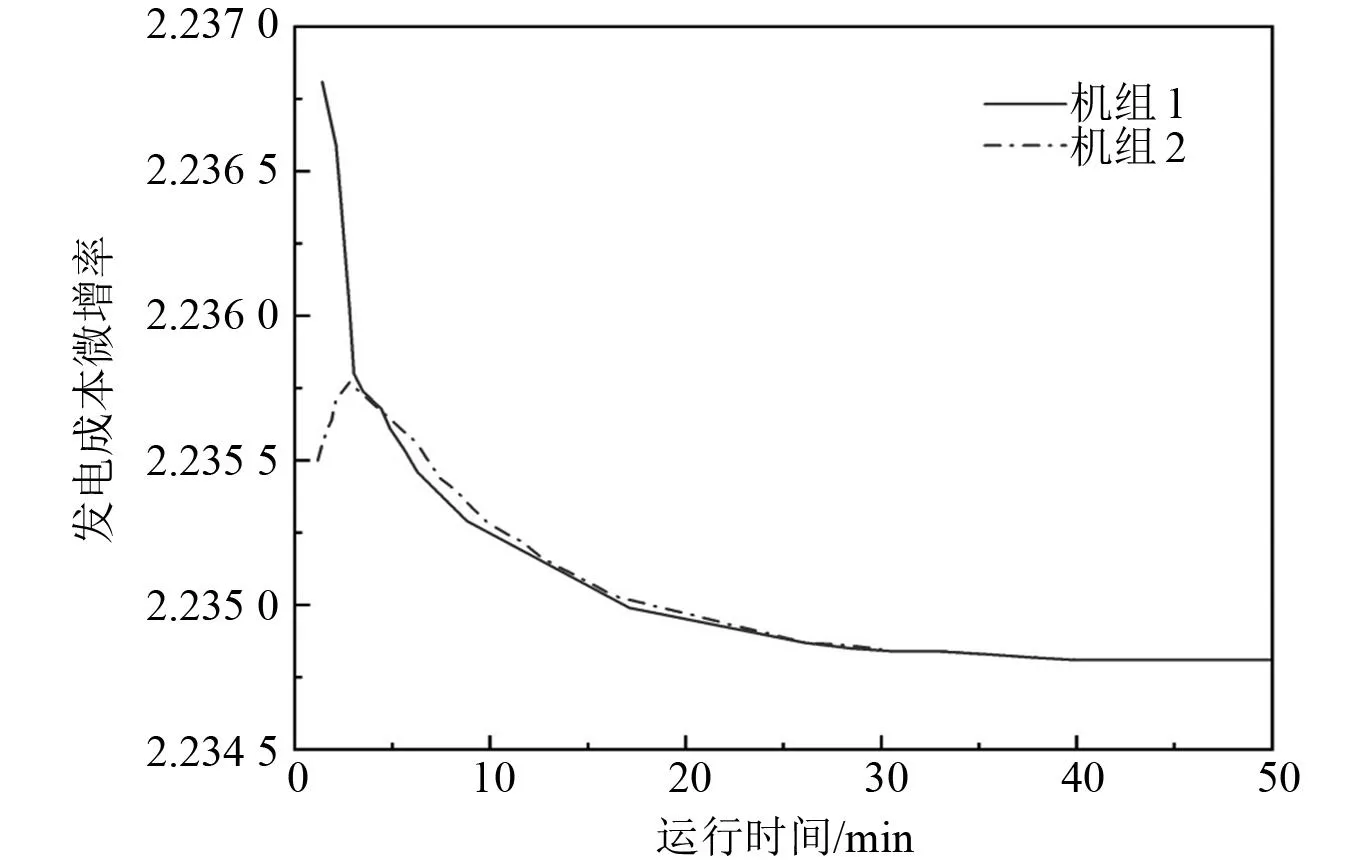
图4 区域3设备级智能体系统一致性控制过程
3.4 协调控制算法的整体分析
由前两节仿真结果可以统计得到ADN整体运行成本情况,相关结果见表5。另外,图5记录了协调控制过程主馈线出口功率的误差状态。

表5 ADN整体运行成本情况

图5 主馈线出口功率误差变化曲线
由表5可知,本文所提算法全局协调与区域自治两阶段的优化结果基本保持一致,实现了自上而下的整体经济性优化,且图5所示的主馈线出口功率误差在整个协调控制过程均维持较小,实现了有效的控制。在误差允许范围内,ADN运行总成本接近同期最优潮流结果,说明优化结果的有效性。
4 结束语
本文提出一种基于一致性理论的AND经济性协调控制方法,以经济效益最优化为基本原则,采用双层多智能体分布式架构实现区域间的最优协调与各区域的内部优化控制。该方法将各级智能体均视为等效电源,通过自上而下控制发电成本微增率一致以实现整体经济性最优。此外,一致性控制过程只需同级相邻智能体进行信息交互,优化与控制均在智能体本地进行,各智能体优化所需计算量少并能够根据配电网网络变化快速调节自身的运行状态。所提算法在维持主馈线出口功率基本不变情况下能够适应配电网网络变化,并快速调节各可调单元成本微增率到一致,实现了ADN自上而下的整体经济性优化,说明该方法能够有效兼顾ADN的控制效率与整体优化效果。