考虑分布式电源的配电网灾中-灾后两阶段协同韧性恢复决策
2024-02-20刘玉玲
刘玉玲,张 峰,张 刚,丁 磊
(1.电网智能化调度与控制教育部重点实验室(山东大学),山东省 济南市250061;2.烟台哈尔滨工程大学研究院,山东省 烟台市 264006)
0 引言
近年来,台风、洪水等极端自然灾害频繁发生,而配电网网架基础设施薄弱,极易受到破坏而造成大规模停电事故[1-4]。2021 年7 月,中国郑州遭受特大暴雨极端天气,导致郑州地区停运线路473 条,736 台变压器受损,近10 万户用电受到影响,造成重大经济损失[5]。可见,针对自然灾害引起的配电网大规模故障,构建具有恢复力的韧性配电网刻不容缓[6-8]。
根据灾害发生的时序,提高配电网韧性水平的措施可分为灾前预防、灾中应急和灾后恢复3 个部分。灾前阶段通过线路加固[9]等措施加强对灾害的抵御能力。 灾中阶段通过采取分布式电源(distributed generator,DG)调度、网络重构[10]等应急措施来减少停电范围。文献[11-13]提出通过控制远程开关状态和DG 黑启动,形成由多个DG 供电的微电网,以实现配电网自下而上恢复。灾后恢复阶段则利用各类灵活资源保障重要负荷的供电,并调度维修队对故障设备进行修复[14],重新使配电网恢复至正常供电状态。文献[15]考虑了故障维修人员、开关操作人员调度与配电网恢复之间的关系,构建了人员协同下的配电网灾后恢复模型。
上述研究已分别在灾中、灾后系统恢复方面作出一定贡献,但其一般将灾中和灾后阶段进行独立决策,忽略了灾中和灾后阶段在恢复顺序上的连续性和关联性,可能造成决策结果次优,延缓灾后恢复。因此,有研究开始将灾中和灾后两个阶段一起进行优化决策[16-18]。文献[19]考虑了灾中交通状况对灾后的影响,建立了计及移动发电机和维修人员调度的多阶段恢复模型。文献[20]考虑灾中微能源网停电管理方案对灾后的影响,建立了考虑微能源网支撑作用的配电网故障恢复模型。上述文献考虑了灾中灾害强度和电源停电对灾后恢复的影响,但忽略了灾中可用恢复措施与灾后恢复的协同作用。文献[21]将灾中和灾后恢复措施作为整体,提出了配电网多时间尺度恢复策略。文献[22]提出了灾中阶段形成微电网、灾后根据负荷需求调整DG 出力的配电网恢复模型。文献[23]考虑台风灾害下各类机组的响应特性,提出在灾中阶段优化火电、水电、核电等机组组合,灾后阶段增加维修队伍的协同恢复策略。上述文献已初步对灾中-灾后恢复操作之间的协同进行了研究,但仅考虑灾中单一恢复操作对灾后的影响,协同方面考虑有限,未综合考虑灾中与灾后阶段多种恢复操作之间的相互影响。例如,灾中阶段通过微电网恢复供电的措施不仅会影响灾后阶段维修人员调度,还可能导致灾后阶段部分网络拓扑无法调整,导致负荷停电时间延长。
通过协同灾中-灾后两阶段的多种恢复资源,制定出最优的恢复方案,能够加速配电网的恢复进程,减少停电损失。然而,不同负荷在灾中和灾后阶段具备的恢复条件不同,且灾中和灾后阶段各种恢复措施之间互相关联,导致建模困难。例如,区域内无故障的负荷可在灾中阶段通过DG 形成微电网恢复供电,而区域有故障的负荷必须在灾后阶段故障修复之后,再恢复供电。另外,协同模型涉及多种恢复措施的时间变量和0-1 决策量,变量之间相互耦合,也增加了建模的困难。
针对以上问题,本文提出一种基于灾中-灾后两阶段协同决策的配电网快速恢复方法,综合DG 调度、网络拓扑改变、维修人员调度等多种恢复措施,建立灾中-灾后恢复的相互作用模型。首先,以元胞为基础划分不同恢复条件的负荷;其次,在灾中阶段建立灾中元胞恢复模型进行重要负荷恢复决策,并在灾后阶段建立灾后维修人员调度、元胞恢复、供能路径的模型;然后,考虑灾后负荷供能路径对灾中网络拓扑的需求以及灾中决策对灾后的影响,建立灾中-灾后耦合约束;最后,采用大M法和小ε法对模型进行线性化处理,并通过CPLEX 进行求解。
1 灾中-灾后协同恢复框架
图1 为灾害发生后韧性配电网的响应图。具体可分为3 个阶段:灾前规划阶段t0—t1、灾中应急响应阶段t1—t2、灾后恢复阶段t2—t3。其中,灾前规划阶段通过线路加固、DG 预调等方式,提高配电网对灾害的抵御能力;灾中应急响应阶段通过利用DG 和改变网络拓扑等方式保障重要负荷的供电,减少停电范围;灾后恢复阶段在通过调度维修人员抢修故障的同时,调用DG 等灵活性资源,通过改变网络拓扑的方式,使得配电网快速恢复至灾前的状态。
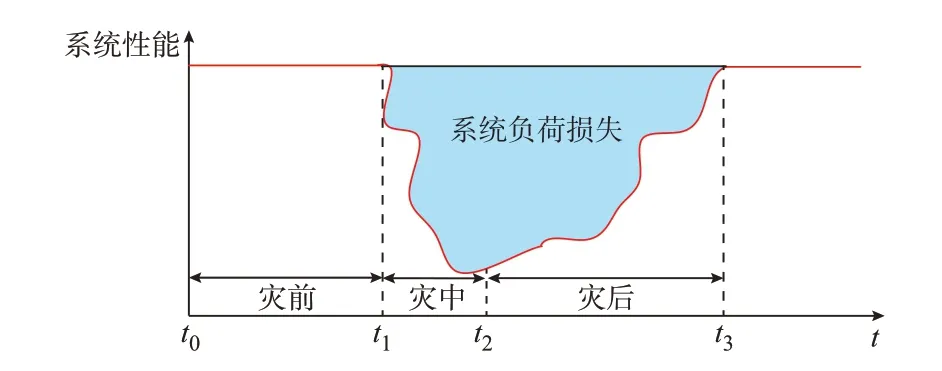
图1 韧性配电网响应示意图Fig.1 Schematic diagram of response of a resilient distribution network
由此可见,灾中和灾后阶段在恢复时间上具有连续性。同时,二者在恢复资源上存在相同之处。例如,灾中和灾后阶段都可以通过调整网络拓扑和DG 形成微电网的方式恢复负荷。因此,通过建立灾中-灾后两阶段协同优化模型,能够充分考虑灾中和灾后阶段之间复杂的操作特征以及信息的关联性,协同灾中-灾后阶段的多种恢复资源,制定出两个阶段最优的恢复方案,加速配电网的恢复进程,减少停电损失。为此,文中考虑灾中应急响应阶段和灾后恢复阶段的耦合关系,充分协同两阶段的恢复资源,保证恢复过程决策的连续性,提高配电网的恢复速度。
考虑到中国城市配电网规模庞大、网络结构复杂,文中做以下假设:
1)配电网开关包括智能开关(smart switch,SSW)[24-25]和普通开关,其中,智能开关的两端具有电压、电流传感器,能够远程控制开关两侧的区域微电网趋于同步,并闭合开关。普通开关只具备远程控制闭合的能力,不具备同步能力。
2)DG 都具备黑启动能力,能提供基准频率和较为稳定的电压。其中,光伏、风电等间歇式DG,通过在灾前提前配备柴油机等电源,使其具备黑启动能力[26],并通过储能、鲁棒模型预测等方式应对其出力不可控造成元胞内功率不匹配的问题[27]。
3)为简化分析,以节点元胞为单位进行配电网恢复建模,节点元胞是节点之间通过非开关线路相连的节点集合。为保证配电网的辐射性,每个元胞至少通过一个开关与其他元胞互联,且两个相邻的元胞之间只能通过一个开关相连[25]。
针对假设3,本文根据元胞内部是否有DG 和故障元件,将元胞分成A、B、C、D 四类,如表1 所示,同时,变电站单独看作一个元胞。
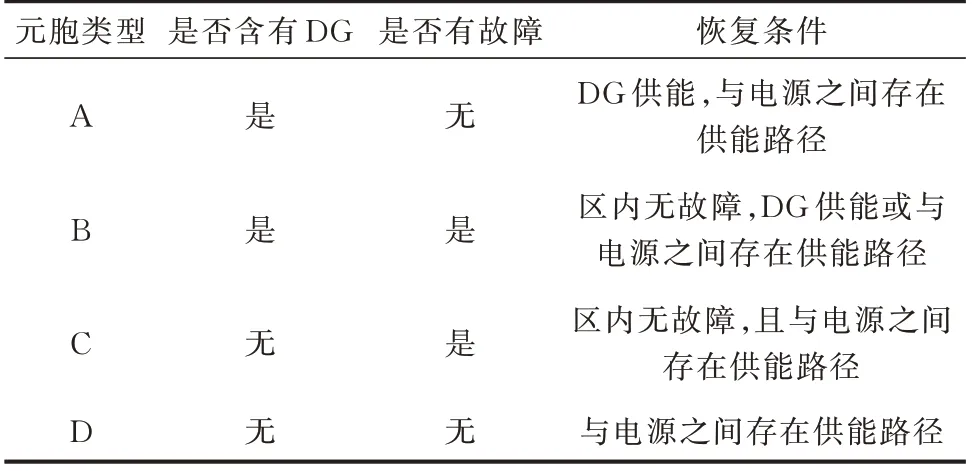
表1 元胞分类Table 1 Classification of cells
基于以上假设,本文提出基于灾中-灾后两阶段协同决策的配电网快速恢复方法框架如图2 所示。
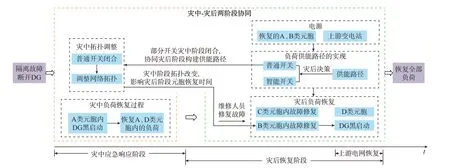
图2 灾中-灾后两阶段协同恢复框架Fig.2 Framework of in- and post-disaster two-stage coordinated recovery
具体而言:
1)在灾中阶段,无故障元件的A 类和D 类元胞通过DG 黑启动进行供电。同时,考虑到普通开关不具备自同步能力,为保证灾后供能路径的快速恢复,需要在灾中阶段闭合部分普通开关,初步调整网络拓扑结构。
2)在灾后阶段,以灾中的网络拓扑为基准,首先调度维修人员抢修故障元件;在故障修复后,B 类元胞可通过DG 黑启动恢复元胞内的负荷;同时,对于内部无DG 的C 类元胞和剩余未恢复的D 类元胞,可通过与已恢复的A、B 类元胞或恢复后的变电站之间建立供能路径来恢复供电。
需要指出的是,在灾前阶段根据开关的位置划分元胞范围,故障发生后只需要对元胞进行分类。而灾后阶段元胞分类和优化决策的耗时相较于整个恢复过程来说非常短,甚至可以忽略。因此,模型能够满足在线应用的要求。
2 灾中-灾后两阶段协同恢复模型
由前述分析可知,灾中-灾后阶段存在连续性和耦合性。因此,为提高配电网的恢复速度,文中建立了灾中-灾后两阶段协同恢复模型,如图3 所示。首先,在灾中通过对DG 黑启动序列和元胞恢复时间建模,建立灾中元胞恢复模型;其次,在灾后建立维修人员调度模型、元胞恢复模型和供能路径模型,联合决策灾后阶段的维修路径、负荷恢复时间、开关状态及时间;最后,充分考虑灾中-灾后过程的相互作用,建立灾中-灾后两阶段协同下的拓扑调整模型和负荷恢复模型,实现负荷的快速恢复。
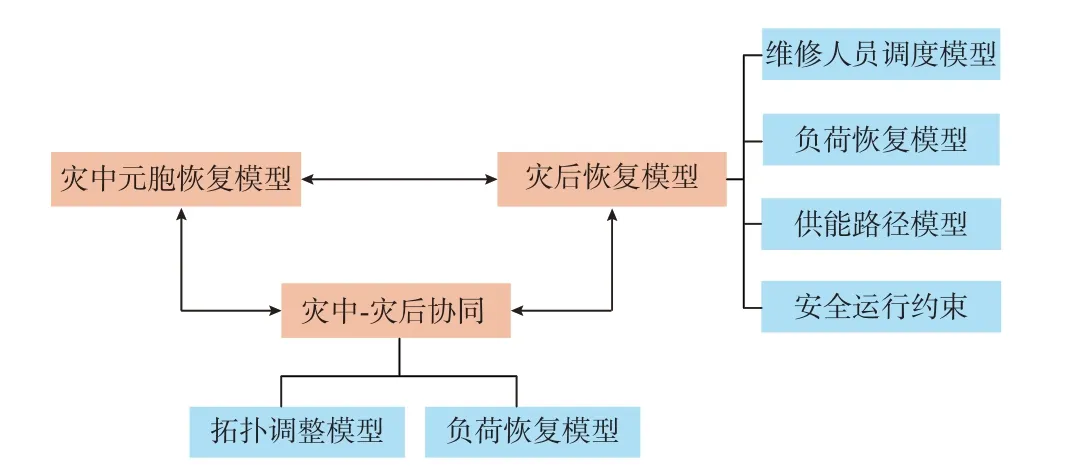
图3 灾中-灾后两阶段协同恢复模型Fig.3 In- and post-disaster two-stage coordinated recovery model
为提高配电网的恢复速度、减少负荷停电时间,以灾中-灾后全阶段停电损失最小为目标函数:
式中:I为配电网节点集合;为节点i的负荷供能时间,也等于负荷的停电时间;ωi为节点i负荷的重要程度;为节点i的负荷功率。其中,负荷停电时间乘以相应的功率即为负荷停电的电能损失,同时,加入节点负荷重要程度表示重要负荷的损失更严重。
2.1 灾中阶段建模
灾中阶段通过采取DG、改变网络拓扑等措施保障重要负荷的供电,并为灾后阶段的快速恢复提供支撑。为此,本文以DG 黑启动为核心,建立了灾中元胞恢复模型。该模型通过DG 黑启动为重要负荷供电。本文将其分为两个子问题进行建模,分别为DG 黑启动问题和元胞恢复时间问题。
1)DG 黑启动问题
因为灾中阶段只有A 类元胞具备DG 和区域内无故障的条件,所以这部分建模针对A 类元胞。考虑灾中-灾后阶段的网络拓扑调整模型,在灾中阶段初步调整网络结构后,灾中阶段A 类元胞内的DG不会全部黑启动。例如,在图4 中,A 类元胞1 和2都具备DG,且两个元胞之间的开关闭合,此时,选择黑启动时间短的DG 进行黑启动[28],建立基准电压和频率,而另一个DG 并网发电即可。
因此,需要对DG 的黑启动变量进行约束,如式(2)—式(4)所示:其中,式(3)表示两个A 或B 类元胞之间的普通开关没有闭合情况下,A 或B 类元胞均进行黑启动;式(3)和式(4)表示两个A 或B 类元胞之间的普通开关闭合情况下,选择黑启动时间更短的DG 进行启动。其余情况下,A 类元胞的DG 均黑启动。
式中:Im为元胞m内的节点集合;NA、NB分别为A、B类元胞的集合;0-1 变量表示位于元胞m内节点i的DG 黑启动状态,=1 表示黑启动,反之,表示进行并网;和分别为元胞m和n内的DG 黑启动的时间;0-1 变量表示元胞m和n之间普通开关的状态,=1 表示开关闭合,反之,表示打开;M为很大的正数。
2)元胞恢复时间问题
该部分模型实现无故障区内的负荷供电。其中,A 类元胞通过DG 黑启动或并网恢复,即式(5)、式(6);式(7)表示若A 类元胞内DG 容量能够满足本元胞和D 类元胞的负荷需求,则D 类元胞恢复时间为开关闭合时间;式(8)表示由A 类元胞恢复D类元胞的开关闭合时间;式(9)表示元胞恢复后,其内部负荷可以在元胞恢复后延时Tc后恢复;式(10)表示DG 的正常供电时间等于元胞恢复时间。本文假定上游变电站断开,故灾中阶段不考虑变电站为D 类元胞供能的情况。
2.2 灾后阶段建模
灾后阶段在灾中恢复的基础上,通过合理调配故障维修队修复电力设备,配合DG 调用、网络重构等措施形成负荷持续供电的运行方案,对配电网的快速恢复十分重要。在灾后模型中,通过对维修路径、DG 黑启动序列、元胞恢复时间和供能路径进行决策,恢复故障区域的供电。为此,将灾后阶段的建模分为维修人员调度建模、负荷恢复建模、供能路径建模和安全运行约束4 个部分。
2.2.1 维修人员调度建模
维修人员调度建模是灾后恢复的第1 个环节,通过决策维修人员的路径对故障元件进行修复,得到故障元件k的修复时间,也是负荷恢复的基础。文中对维修人员调度的建模见附录A 式(A1)—式(A5)。
2.2.2 负荷恢复建模
灾后阶段的负荷恢复包括变电站恢复、B 和C/D 类元胞恢复。与灾中阶段相似,这里也将元胞恢复模型分为DG 黑启动建模和元胞恢复时间建模两个部分。
灾中阶段已对A 类元胞的黑启动变量建模。因此,灾后阶段的DG 黑启动变量建模主要针对B类元胞。有两种情况下B 类元胞的DG 无须黑启动:情况1 是当A 类元胞和B 类元胞之间形成供能路径时,由于A 类元胞已在灾中阶段恢复,此时B 类元胞的DG 只需并网即可,满足式(11);情况2 是两个B 类元胞之间建立供能路径,需要考虑到灾中阶段网络拓扑的影响,具体在2.3 节灾中-灾后的耦合约束中建模。
B 类元胞的恢复需要等到元胞内部的故障修复完毕后,DG 通过黑启动或并网来为元胞内的负荷供电。式(12)表示B 类元胞通过DG 黑启动恢复的时间为区域内故障维修完成时间与DG 黑启动时间之和。式(13)表示A/B 类元胞之间形成供能路径情况下,B 类元胞通过DG 并网恢复供电的时间为开关闭合时间与DG 并网时间之和。
式中:VM为故障网络中的节点集合。
需要指出的是,式(12)只是B 类元胞恢复时间的一个时间范围,具体的B 类元胞恢复时间还需要考虑到灾中决策的影响,具体在2.3 节中介绍。
C 类元胞内的故障修复完成后,需要形成由上游变电站或附近A/B 类元胞供电的供能路径,才能够恢复供电。D 类元胞内无故障,可认为故障修复时间为0。当A/B 类元胞的DG 容量足够恢复自身和相邻的C/D 类元胞时,C/D 类元胞的恢复时间等于和A/B 类元胞建立供能路径的时间,否则需等待变电站恢复后恢复供电。具体建模见附录A 式(A8)—式(A10)。
2.2.3 供能路径建模
C 类元胞故障修复后,需要与含有电源的A/B元胞或变电站之间形成供能路径来进行供电;已恢复的A/B 类元胞也需要连接上游变电站来保证负荷的持续稳定供电。因此,建立供能路径是恢复所有负荷供电的关键途径。本节将该模型分为供能路径决策模型和供能时间模型两个子模型进行建模。
1)供能路径决策模型
本文中,采用单物网络流模型[23]对供能路径进行建模。式(14)表示总的开关闭合数目等于元胞总数目减去变电站数目,避免形成环网。式(15)表示当上游变电站修复好之后,确保每个元胞都与变电站连接,保证负荷的持续供电。式(16)表示元胞m和n之间只能是普通开关或智能开关中的一种。
式中:Kcell为元胞的总数量;KS为上游变电站元胞的数量;Fmn,t为元胞m和n之间的供能路径在t时刻的虚拟潮流;为0-1 变量,其值表示元胞n是否为变电站元胞,如果是变电站元胞则为1,否则为0;a(n)、b(n)分别为将每个元胞看作一个节点情况下的子节点和母节点集合。
2)供能时间模型
考虑到普通开关与智能开关的不同,这里将两种开关形成供能路径的时间分别进行建模。
普通开关:根据普通开关两端的元胞类型不同,可分为6 种情况,如图5 所示。
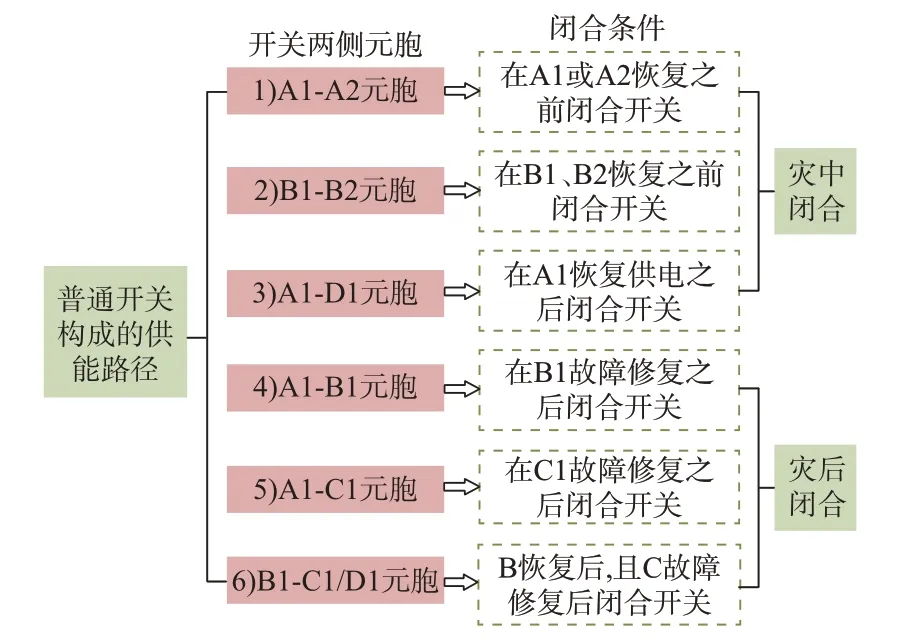
图5 普通开关的6 种情况Fig.5 Six cases of normal switches
情况1 和2 需要在灾中-灾后两阶段协同下形成,具体见2.3 节,这里对其余几种情况进行建模。式(17)表示情况4,供能路径在B 类元胞故障修复后形成。式(18)表示情况5 和6 下,若A/B 类元胞内的DG 容量足够恢复C 类元胞负荷,则A/B 类元胞恢复后闭合开关形成供能路径为C 类元胞供能,否则等待变电站修复后,再闭合开关为C 类元胞供能。
智能开关:根据智能开关两端的元胞类型不同,分为7 种情况,如图6 所示。与普通开关相比多了情况7,这是因为假设上游变电站处的开关一般能够同步接入电网。
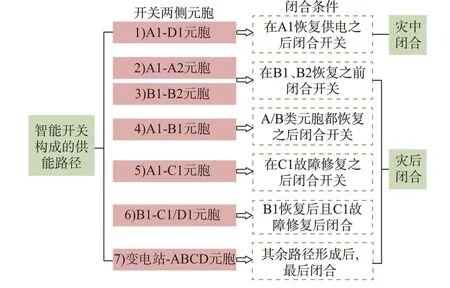
图6 智能开关的7 种情况Fig.6 Seven cases of smart switches
情况1 在灾中建模中已介绍。式(19)表示元胞情况2、3 和4 的供能时间,在两侧元胞都恢复后,经同步后闭合开关;式(20)表示情况5 和6 下的供能时间;式(21)表示情况7 下,连接变电站的智能开关在供能路径形成后闭合。
在获得配电网恢复时间和供能路径后,引入t时刻元胞内负荷节点i的供能状态、元胞内DG 节点i的正常工作状态、非开关线路i-j供能状态,以及元胞m和n之间普通开关和智能开关线路的供能状态。具体见附录A 式(A11)—式(A15)。
2.2.4 安全运行约束
本文采用基于供能时间驱动的变时间步长的配电网恢复模型,只需在每个供能时刻进行安全约束校验即可[15]。具体约束见附录A 式(A16)—式(A22)。
2.3 灾中-灾后耦合约束
由于普通开关不具备自同步功能,灾后阶段的部分供能路径需要协同灾中构建。同时,灾中阶段构建供能路径造成的网络拓扑变化,也会直接影响灾后负荷的恢复。
以图7(a)为例,假设元胞1 和2 是A 类元胞,基于灾中恢复模型,元胞1 和2 在灾中恢复供电;基于灾后供能路径模型,需要闭合普通开关3-5 为元胞3供能,但由于此时开关两侧是由两个DG 形成的区域微电网,无法闭合。因此,必须在灾中阶段元胞恢复之前提前闭合开关来形成供能路径。再以图7(b)为例,由于在灾中闭合了开关3-5,造成元胞1和2 相连。那么,元胞1 在灾后恢复的条件变成了元胞1 和2 内都没有故障元件。
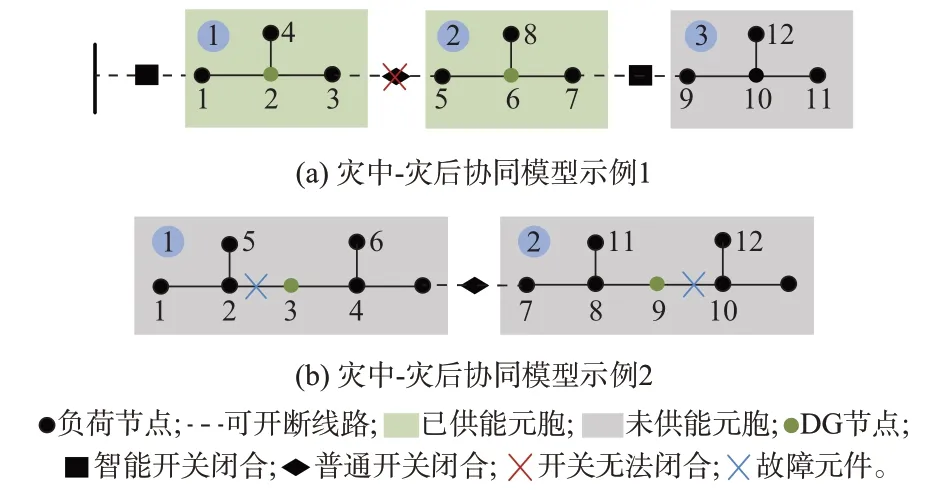
图7 灾中-灾后协同恢复示意图Fig.7 Schematic diagram of in- and post-disaster coordinated recovery
因此,综合考虑灾中-灾后恢复过程的相互影响,建立灾中-灾后两阶段的协同恢复模型,对提高配电网恢复速度十分关键。下文对其之间的相互作用进行建模。
2.3.1 灾中-灾后网络拓扑调整模型
基于灾后阶段的供能路径模型得到开关的闭合决策量,通过对开关闭合时间进行建模,使其在灾中阶段闭合,实现灾中-灾后两阶段协同下的网络拓扑调整。灾中阶段需要针对普通开关的情况1 和2 进行网络拓扑的调整。
1)A1-A2 元胞
如图7(a)所示,当普通开关两侧是两个A 类元胞时,必须在灾中阶段且A 类元胞恢复之前提前闭合开关来形成。为此,建立式(22)约束,表示两个A类元胞之间普通开关闭合的时间等于DG 黑启动的元胞恢复时间加上开关闭合远程控制时间。
2)B1-B2 元胞
与A1-A2 元胞类似,考虑图7(a)的元胞1 和2是B 类元胞。首先,基于灾后恢复模型,两个B 类元胞在故障修复后DG 进行黑启动;然后,基于供能路径模型,开关3-5 需要闭合,但普通开关不具备自同步供能,无法闭合。因此,必须通过灾中提前闭合开关来形成。对此情况,建立如下约束:
式中:Tmid为灾中应急响应阶段的持续时间。
与A1-A2 元胞情况不同的是,因为B 类元胞在灾后阶段才会恢复,故只需将开关闭合时间约束在灾中阶段即可,但在A1-A2 元胞情况下,A 类元胞在灾中恢复,故需要严格将其约束在两个A 类元胞都恢复之前闭合。
2.3.2 灾中-灾后负荷恢复模型
由前述分析可知,灾中阶段协同灾后阶段进行网络拓扑的调整。同时,在灾后恢复中,需要对这部分网络调整带来的影响进行建模。
灾中拓扑的改变主要对灾后B 类元胞的恢复产生影响。以图7(b)为例,若元胞1 和2 是B 类元胞,灾中提前闭合开关3-5,将二者合为一个元胞,则灾后阶段恢复中,需要满足两个元胞都无故障的条件下才能被恢复。另外,两个DG 只黑启动一个即可。由此可见,灾中拓扑对B 类元胞的影响具体在DG黑启动序列和元胞恢复时间两个方面。下文分别对这两种影响进行建模。
DG 黑启动序列的约束同式(3)、式(4),即如果两个B 类元胞之间的开关在灾中闭合,则让黑启动时间短的DG 进行黑启动。
B 类元胞恢复时间的影响如式(24)、式(25)所示:式(24)表示如果两个B 类元胞之间的普通开关闭合,则DG 黑启动的元胞的恢复时间还需大于另一个B 类元胞的故障修复时间;式(25)表示DG 未黑启动的B 类元胞需要等待DG 并网后才能恢复区内所有负荷的供电。
式(24)、式(25)和灾后模型的式(12)、式(13)共同确定灾后B 类元胞的恢复时间。
最后,得到基于DG 的灾中-灾后两阶段协同模型如下。目标函数:约束条件包括:灾中阶段元胞恢复模型、灾后阶段维修人员调度模型、灾后配电网恢复模型、供能路径模型、安全运行约束、灾中-灾后耦合约束。
2.4 模型求解
上述恢复模型为混合整数非线性规划模型,如式(24)中存在0-1 变量与连续变量相乘的非线性项,附录A 式(A11)—式(A15)是非线性约束,需要对上面的非线性项进行线性化。
首先,对于0-1 变量与连续变量相乘的非线性项,通过引入辅助0-1 变量αm,n,t将式(24)按照以下方式线性化:
其次,通过引入一个较小的数ε,将附录A 式(A11)—式(A13)按照以下方式进行线性化:
最后,通过引入一个赋值变量βm,n,如式(28)所示,并加入变量ε对附录A 式(A14)、式(A15)进行线性化,最后线性化为式(29)。
通过以上方法对非线性项进行线性化处理,将模型转化为混合整数线性规划模型,并通过CPLEX进行求解。
3 算例分析
采用IEEE 123 节点和IEEE 246 节点的配电系统对所提模型进行验证。下文所有仿真均在配置Intel i5 处理器、16 GB RAM 的计算机以及GAMS25.1.3/CPLEX25.1.3 中进行。
3.1 IEEE 123 节点仿真算例
3.1.1 仿真算例设计
如图8 所示,所测试的IEEE 123 节点配电系统包含1 个变电站、5 个DG、8 个远程智能控制开关、4 个远程普通控制开关,总负荷为3 490 kW,共有7 处线路发生故障,并设有3 个维修站点。根据DG和故障信息,IEEE 123 节点配电系统分为3 个A 类元胞、2 个B 类元胞、4 个C 类元胞和1 个D 类元胞,已用不同颜色标出。元胞内的负荷情况和DG 出力情况分别如附录B 表B1、表B2 所示。
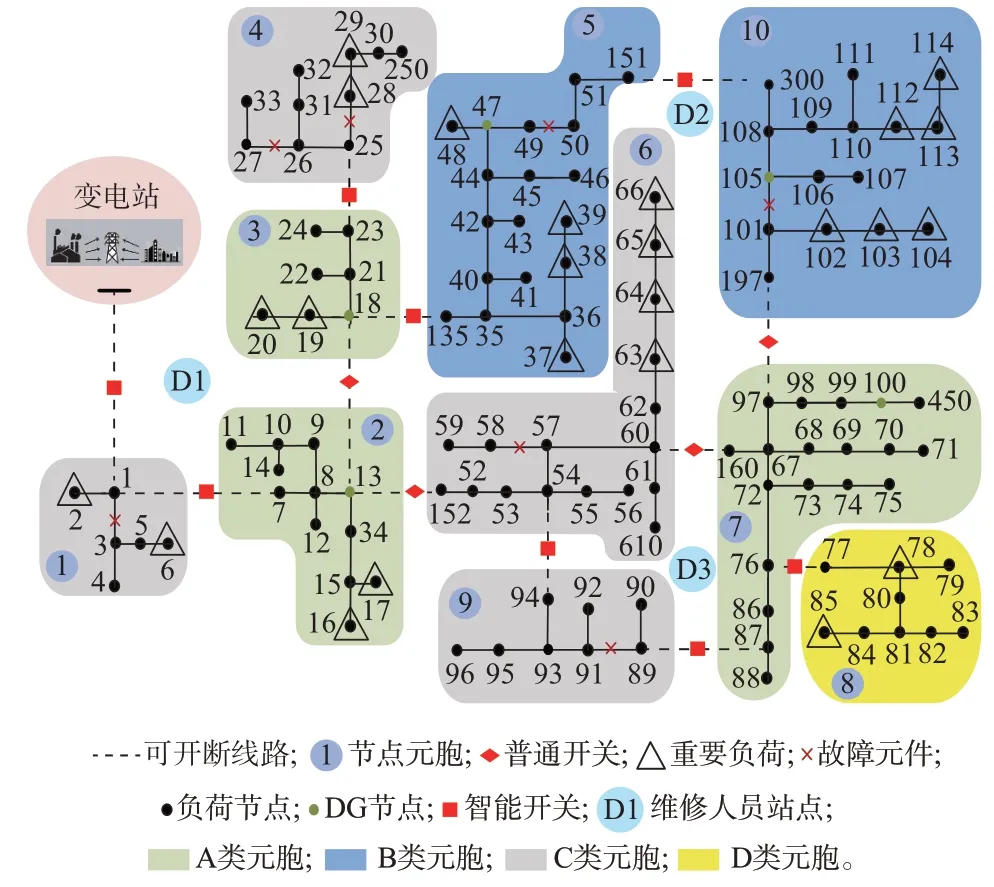
图8 IEEE 123 节点配电系统Fig.8 IEEE 123-bus distribution system
为简化维修人员的调度模型,提前采用聚类方法将故障元件指派给距离最近的站点[15]。由于缺乏真实数据,在MATLAB 中使用随机数生成器随机生成故障元件修复时间、交通时间和智能开关同步时间,分别如附录B 表B3—表B8 所示。
3.1.2 仿真结果
通过对所提模型进行求解,得到维修人员调度路径如表2 所示,配电网的恢复顺序如表3 所示。表2 中,路径一栏中括号内数值表示到达/离开时间,单位均为分钟;表3 中,DG 是否黑启动采用0-1表示,为1 表示进行黑启动,为0 则代表只进行并网。
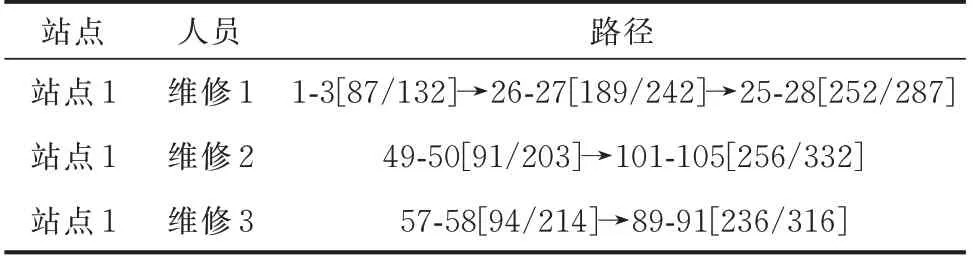
表2 维修人员调度表Table 2 Scheduling table for maintenance personnel
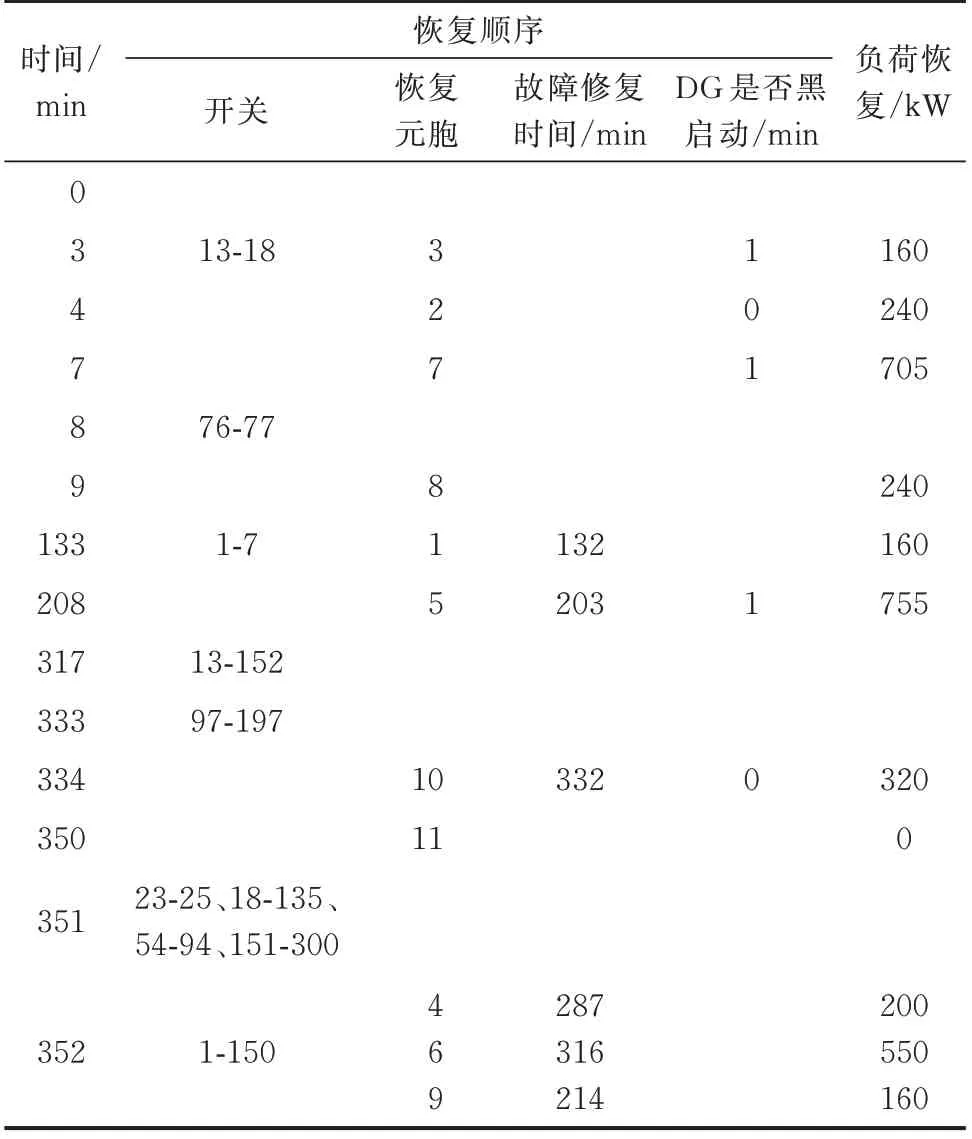
表3 配电网恢复顺序Table 3 Sequence of distribution network recovery
通过所提恢复模型,配电网最终恢复为一个由变电站供电的配电系统,所有的负荷均得到恢复。配电网的最终拓扑如附录C 图C1 所示。
灾中阶段,DG 通过黑启动为无故障区域的负荷供电,减少停电时间。以表3 中A 类元胞7 和D类元胞8 为例,t=7 min 时元胞7 内的DG 黑启动,恢复元胞7 内的负荷;t=8 min 时开关76-77 闭合,元胞7 的DG 为元胞8 内的负荷供电。
从表3 中可以看出,灾中-灾后两阶段的协同配合对于负荷的恢复至关重要。以图9 中A 类元胞2、3 和C 类元胞4 的恢复为例:
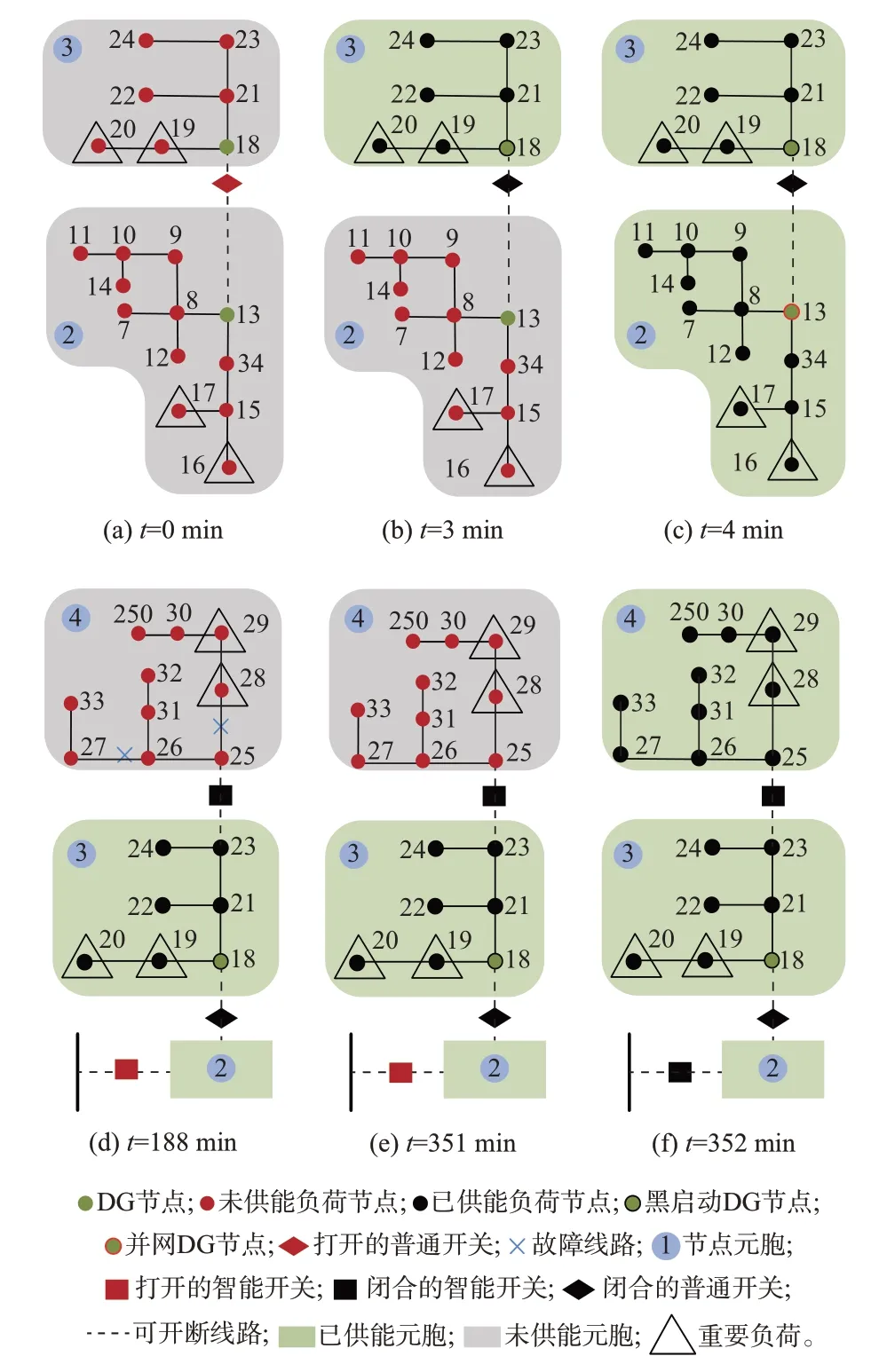
图9 元胞2、3、4 恢复图解Fig.9 Illustration of recovery of cells 2, 3 and 4
1)基于灾中阶段的DG 黑启动模型和元胞恢复模型,元胞3 内的DG 进行黑启动,在t=3 min 时,DG 黑启动成功,恢复元胞3 内的负荷。同时,基于灾中-灾后两阶段协同下的拓扑调整模型,在灾中阶段提前闭合开关13-18。
2)元胞3 恢复且开关13-18 闭合后,已经建立了基准的电压和频率,基于灾中元胞恢复模型,元胞2的DG 在t=4 min 完成并网,恢复了元胞2 内的负荷。
3)灾后阶段,基于维修人员调度模型,在t=188 min 将元胞4 内的故障修复完毕。
4)基于灾后阶段供能路径模型,在t=351 min闭合开关23-25,加上协同灾中阶段闭合的开关13-18,元胞4 与变电站之间形成了供能路径。
5)在t=352 min 变电站接入配电网后,元胞4内的负荷恢复供电。
灾后阶段,通过维修人员的调度,配合DG、调整网络拓扑等措施,可以快速恢复负荷的供电。以表3 中元胞7 和10 为例,基于灾后元胞恢复模型,t=333 min 时开关97-197 闭合,由于A 类元胞7 在灾中已经恢复,只需元胞10 内的DG 直接并网发电,便可以恢复元胞7 的供电。通过开关操作,节省了DG 黑启动的时间,提高了恢复速度。又如,在t=132 min 时,元胞1 内的故障修复完毕,下一时刻t=133 min,开关1-14 闭合,形成了由A 类元胞内的DG 为C 类元胞供能的路径,恢复了元胞1 内负荷的供电。由此可以看出,利用DG 自身的供电能力,可以在变电站恢复之前为重要负荷提供支撑,减少停电造成的损失。
从表3 中可以看出,最后基于供能路径建模,建立了所有元胞与变电站之间的供能路径,且保证了电网的辐射性要求。在t=352 min 时,变电站接入配电系统,实现了所有负荷的稳定供电。
3.1.3 模型的优越性
为证明灾中-灾后两阶段协同恢复模型的优越性,将所提模型与文献[11,15]中的灾中、灾后阶段单独决策方案(方案1)、文献[22]仅考虑微电网形成的灾中-灾后两阶段有限协同方案(方案2)进行对比。对比结果如表4 所示。
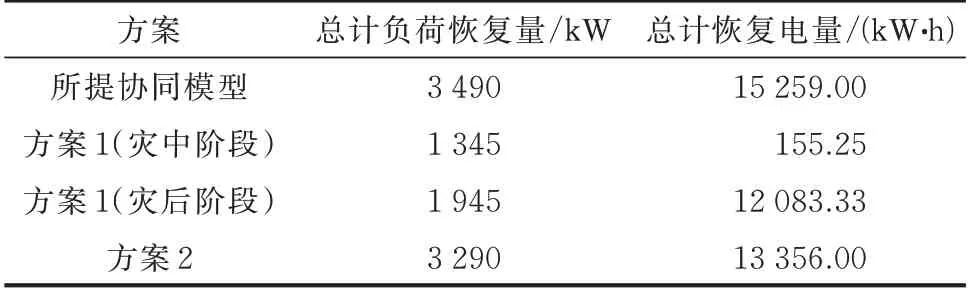
表4 不同方案的结果对比Table 4 Comparison of results of different schemes
由表4 可知,文中所提协同模型能够恢复3 490 kW 的负荷和15 259.00 kW·h 的电量,相较于方案1 的非协同模型多恢复了24.7%,较方案2 的有限协同模型多恢复了12.5%。方案2 的有限协同模型相较于方案1 的非协同模型,总计恢复功率均为3 290 kW,但是总计恢复的电量高于方案1,这是因为考虑灾中阶段DG 形成微电网所生成的协同恢复方案能够在灾中阶段恢复部分重要负荷,负荷的恢复供电时间提前,提高了总体的恢复电量。但是,由于方案1 和方案2 均未考虑灾中网络拓扑与灾后恢复的协同关系,相比于文中所提模型的负荷恢复量减少了200 kW。以方案1 恢复过程为例,如附录B 表B9、表B10 所示,元胞4 内的负荷没有得到恢复。具体原因是没有在灾中阶段闭合开关18-23,造成灾后阶段需要为元胞4 形成供能路径时,因开关18-13 打开而无法形成,最终导致元胞4 内的负荷无法被恢复。
3.2 IEEE 249 节点下的适用性验证
在本节中,采用IEEE 246 节点系统验证所提模型在大型配电系统中的适用性。文中所提模型和有限协同模型的恢复功率对比如表5 所示,最终拓扑图如附录C 图C2 所示。
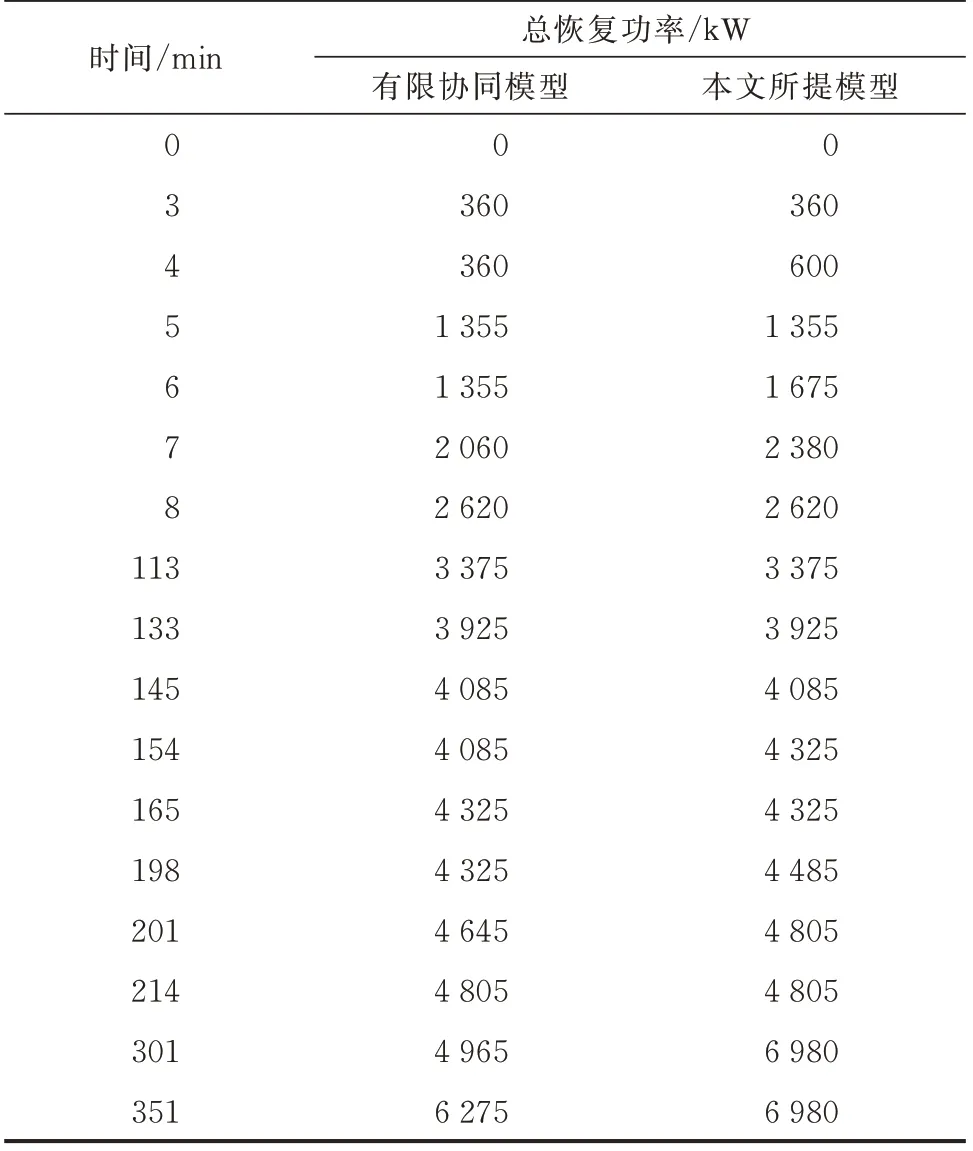
表5 IEEE 246 节点系统下不同方案的总恢复功率Table 5 Total restored power of different schemes in IEEE 246-bus system
文中所提模型能够在301 min 内恢复所有的负荷,较有限协同模型快50 min,原因是有限协同模型仅考虑DG 形成微电网措施下的协同,并未考虑灾中-灾后供能路径的协同,导致部分C 类负荷只能由恢复供电时间较迟的变电站2 供电,延长了恢复时间。此外,文中所提协同模型能够恢复6 980 kW 的负荷,相较于有限协同模型多恢复了10.5% 的负荷。同时,在灾中-灾后阶段的恢复过程中,同样时间下,所提模型恢复的负荷量均大于或等于有限协同模型。由此可见,文中所提协同模型不仅可以恢复更多的负荷,还能够大大缩短负荷的停电时间,提高负荷的恢复速度。
综上所述,在配电网的恢复模型中,充分考虑灾中-灾后决策的相互作用,将灾中-灾后阶段的多种恢复措施进行协同决策,可以获得配电网快速、有效恢复的最优方案,实现配电网大规模故障后的负荷快速恢复。
4 结语
为解决灾中-灾后恢复过程中决策不连续的问题,文中提出了一种基于DG 的灾中-灾后两阶段协同决策的配电网恢复策略,算例验证了所提策略的有效性。所得结论如下:
1)通过对灾中-灾后阶段的相互作用关系建模,建立灾中-灾后两阶段协同恢复模型,能够保障灾中和灾后恢复过程中的最优性,实现负荷的快速恢复。相较于非协同模型,协同模型能够恢复更多的负荷,减少配电网的停电损失。
2)在上游电网停电的情况下,充分利用DG 的自身供电优势,形成区域微电网,对周围的重要负荷进行临时供电,能够减少负荷的停电损失,提升配电网的供电保障能力。
需要指出的是,本文未对灾前预防阶段的恢复措施进行考虑。如何协同灾前-灾中-灾后3 个阶段的恢复措施将是下一步的研究方向。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。