基于Unity3D 的智慧物流实验室孪生研究
2024-02-10李九博乔文宣张瀚文郝留成徐仲勋
孙 丽 李九博 乔文宣 张瀚文 郝留成 徐仲勋
(①大连交通大学机械工程学院,辽宁 大连 116028;②大连交通大学经济管理学院,辽宁 大连 116028;③平高集团有限公司技术中心,河南 平顶山 467001)
随着科学技术的发展,数字孪生这一全新的概念被提出,数字孪生技术也迎来了迅速的发展,它将建模和仿真技术提升至一个新的水平。数字孪生技术是指通过数字化技术建立虚拟世界,将物理实体转换为虚拟模型,并且在虚拟环境中进行模拟和物理运动分析等目的。工业的数字化可以被视为更高生产力的提升路径,数字孪生技术也被作为“工业4.0”的关键领域之一,占据着十分重要的地位[1-3]。由于企业对高端人才的需求和高要求,各大高校学生应该了解并熟练掌握设备的实际操作。但是由于实验设备非常昂贵,且设备的维护费用较高,以至于很多高校望而却步。为了共享某些高校利用率不高的高端实验设备,应用数字孪生技术,对实验设备进行1∶1 建模,再通过Unity3D 平台将设备按照实验现场进行虚拟空间建立,结合PLC 控制,完成虚拟环境与现实环境的联接和实时交互,完成对工作和实验过程中的全生命周期的实时控制与监测[4-5],使无法到达实验现场的学生能够远程操作实验设备并通过屏幕查看实验效果。本文应用Unity3D平台对本校的智慧物流实验室进行了数字孪生和虚拟仿真,可为异地其他高校学生开设云实验奠定基础。
1 物流运输仿真系统的总体设计
1.1 仿真系统设计目的
由于教学内容老化,教学模式僵化,以至于物流专业学生质量不高,物流人才数量供不应求,主要问题表现在学生对于企业物流管理水平的现状分析不到位、专业基础不扎实、专业实践能力较低等方面,进而影响了物流行业的发展。高校为解决智能物流行业人才培养开设智能物流教学实验中心,培养具有创新能力、注重实践和应用、能灵活变通的智能物流人才。但是实验设备的高昂费用,让很多学生无法到达现场进行实操培训,进而导致物流人才的培养出现阻碍。本文在已有的智能物流实验中心的基础上,结合数字孪生技术,实现虚实结合,在PC 端建立一个虚拟仿真操作系统,让异地的其他高校学生可以通过远程操控和实验系统画面进行云实验,完成实际操作的培训学习。实验仿真系统结构图如图1 所示。
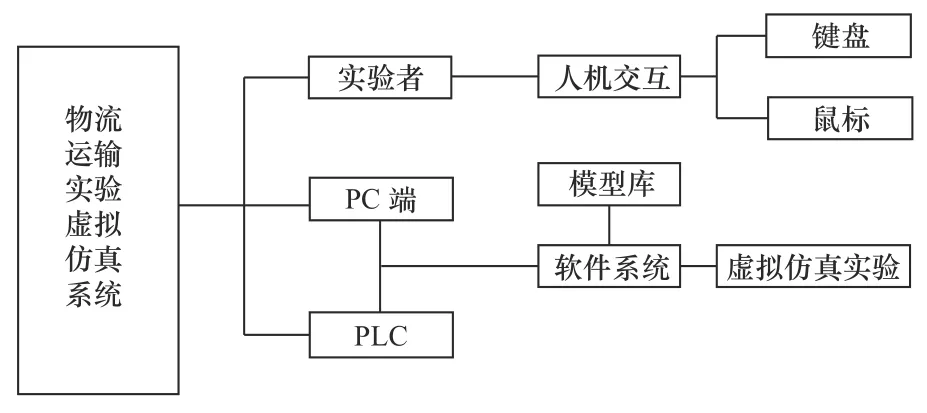
图1 实验仿真系统结构图
1.2 智能物流实验中心现状
本智能物流实验室将设备总电源打开后,在中央控制台处设有紧急制停按钮,当货物放置传送带上,运送到入库口时,被设有的扫描仪扫描货物二维码并记录,再通过堆垛机将货物放置在货架上并记录入库位置。将堆垛机控制柜内的开关调至手动挡,通过控制柜上的方向按钮控制堆垛机和插板的移动;将堆垛机调至自动挡,通过堆垛机物流设备系统进行出入库和调库工作,如图2 所示。货物出库后通过扫描仪进行分拣,进入不同传送带,再通过AGV 搬运到仓储位置。完成整个工作流程后,进行复位,堆垛机回到标准位置,输送链停止工作,物流实验室实物如图3 所示。

图2 堆垛机物流操作系统

图3 智能物流实验室实物图
1.3 仿真系统技术研究
根据智能物流实验中心已有的实验设备,对技术路线进行分析,要实现虚拟仿真系统的建立,需要完成1∶1 设备模型和实验环境的建立,并通过对设备的控制和通信完成信息的虚实交互。最后通过键盘、鼠标和屏幕的实现效果展示,实现对完整智能物流实验的详细学习。虚拟仿真试验系统技术路线如图4 所示。仿真系统主要应用到的关键技术包括三维建模、虚拟环境及动画制作、运动分析、PLC 与Unity3D 的通信等。
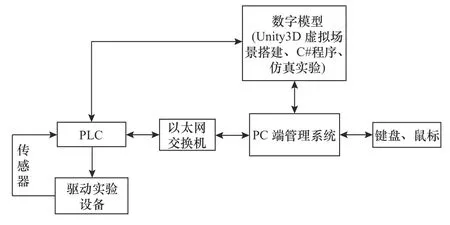
图4 虚拟仿真实验系统设计
2 虚拟仿真系统实现
2.1 三维模型建立
根据已有实验设备进行1∶1 模型建立,可以通过SolidWorks 等软件完成模型建立的工作,在模型建立过程中,对于不影响实际运动的部分可以进行简易绘制,所建模型如图5 所示。

图5 堆垛机三维模型
针对较为复杂的模型可以进行轻量化处理,将建好的模型导入3DMax 中,对模型进行优化贴图等工作,也可以对模型的点面进行缩减,以减少存储体积和后续开发的数据处理量[6]。而对于既影响模型运动又不容易获得数据建模的细小零部件,可以通过3D 扫描仪进行扫描建模,扫描出的模型如图6 所示。
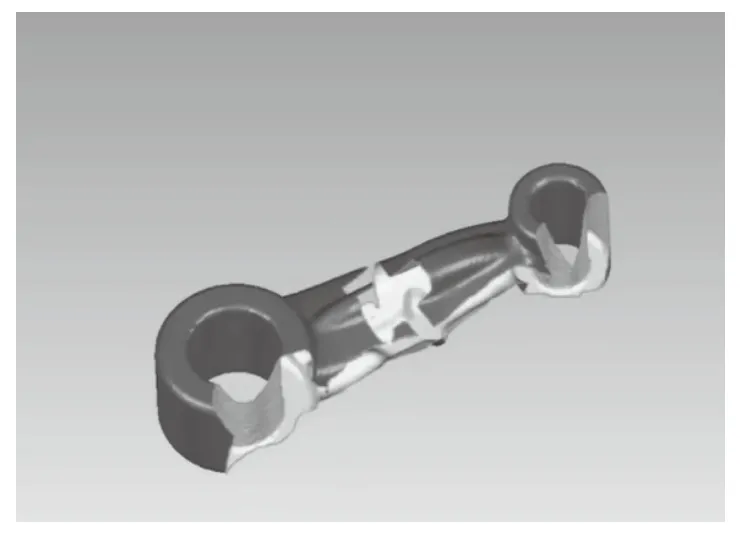
图6 3D 扫描仪所得模型
由于扫描仪扫描所得模型并不完整,因此需要对所建模型进行修补,将扫描模型进行点云导出,再将模型点文件导入Geomagic Wrap 软件,对模型进行修补,并且对其点面进行减噪、缩减处理,完成模型的轻量化,使其进行的点云处理数据量减少,如图7 所示。完成模型修补后,进行封装导出模型。
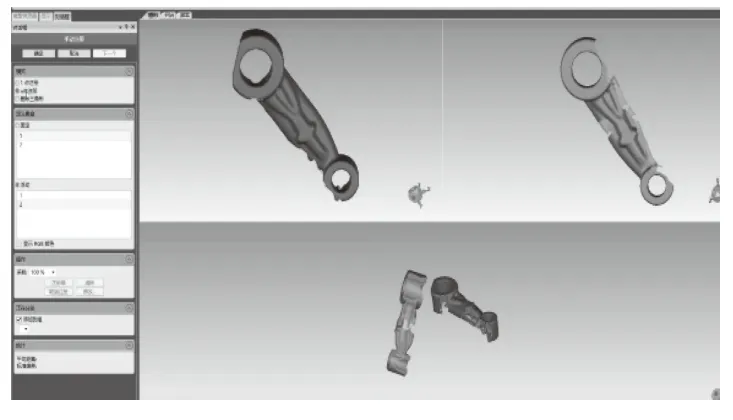
图7 Geomagic Wrap 修补扫描模型
2.2 虚拟环境搭建
完成三维模型的建立和模型的轻量化处理后,将模型文件转为相应格式并导入Unity3D 中,根据实际场地中设备的位置进行摆放,并对虚拟工作空间的周围环境进行绘制,例如墙面的建立、贴图等,实验室设备摆放如图8 所示。

图8 实验设备实物
针对不同模型的不同运动状态对其进行父子层级的定义,保证在固定的层级关系下完成目标动作,完成虚拟环境的搭建,虚拟环境建立如图9所示。
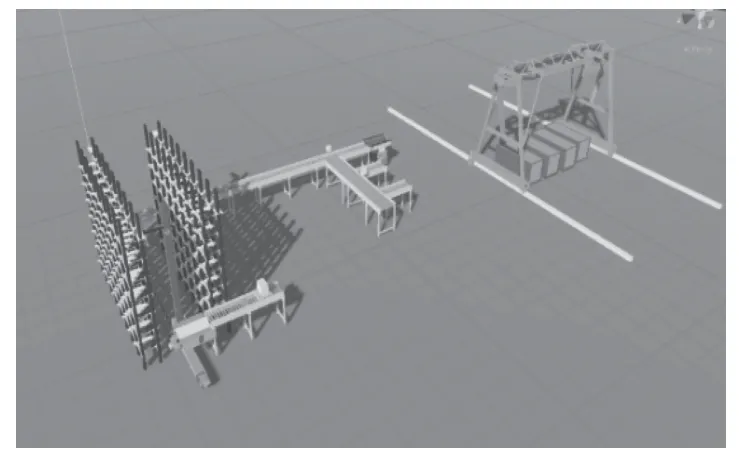
图9 虚拟环境建立
2.3 实时运动仿真实现
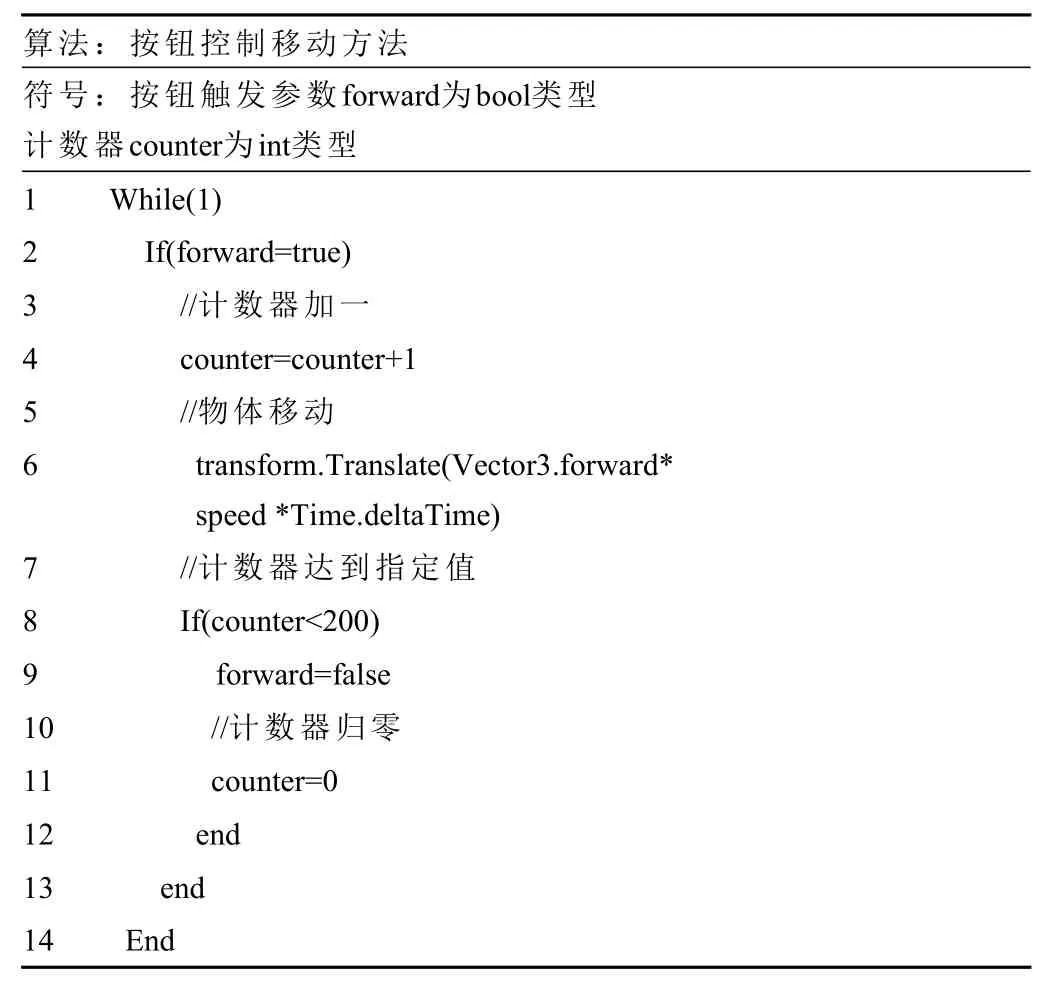
在Unity3D 中完成虚拟环境搭建后,对已有的设备模型进行运动分析,确认设备之间的运动关系;根据设备的运动路线和动作进行代码的编写,如移动、旋转、选取以及抓取等动作,进而完成控制。例如:天车抓取集装箱的动作,用户可以通过键盘来控制天车的移动、天车抓手的移动和抓取动作。关键代码如下:
?
2.4 碰撞及运动分析
该仿真系统不仅包含实验设备,还涉及实验环境等。完成三维模型建立后,需要对真实设备实际的操作和运行动作,进行运动分析;并对任意零件之间发生接触时的相互作用进行分析,即模型与模型之前发生干涉碰撞。该系统中对发生碰撞的零部件进行分析,在Unity3D 平台中设置为刚体并通过碰撞器对刚体间的碰撞关系进行设置,当检测到相关工作模型与目标模型接触后,便会执行程序使运动发生限制,智能停止当下运动或转变运动方向,如图10 所示。
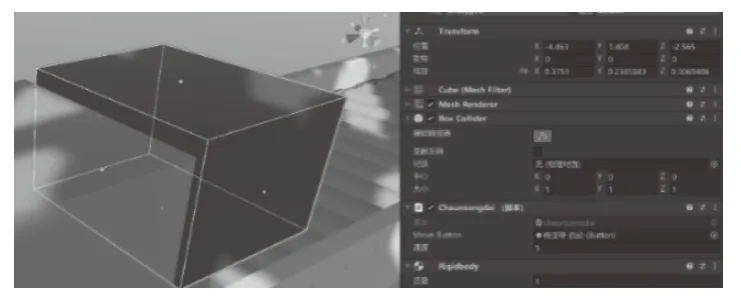
图10 碰撞器设置
2.5 界面控制按钮设计
通过Unity3D 的UGUI 模块对虚拟仿真系统的UI 系统进行设计,通过使用包括面板和按钮的几个组件,创建一个基本的操作界面。在UI 界面的按钮上添加碰撞器,结合C#的代码完成对系统中设备的控制,通过鼠标完成实验的交互操作,如图11 所示。
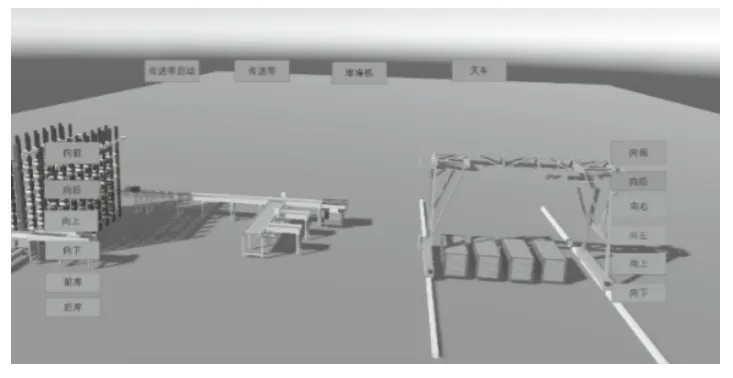
图11 按钮界面设计
2.6 PLC 编程
仿真实验系统不仅要完成虚拟环境下的动画运行,还要完成PLC 编程与Unity3D 的通信,所以要针对实际设备的运动的PLC 控制进行编程,部分程序如图12 所示。
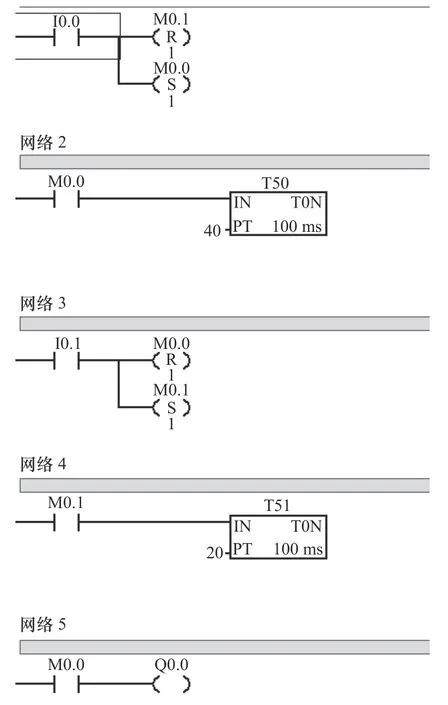
图12 天车抓取货物部分梯形图
2.7 通讯过程实现
为了虚拟仿真系统可以实现实时的控制,就要完成Unity3D 虚拟平台可以实时、连续地接受PLC数据信号,需要对Unity3D 与PLC 进行虚拟联调。通过博图软件与Unity3D 的通信来解决这个问题[7]。首先,通过S7-PLCSIM Advancde 软件作为虚拟机对已经编好的PLC 逻辑控制程序以及外部通信进行仿真。首先设置网卡的IP 地址和子网掩码,将完成的PLC 程序下载到虚拟机中去,然后启动仿真。
3 物流运输仿真系统的设计与实验
该仿真系统通过Unity3D 等软件合作完成,使用者需要通过电脑端进行仿真操作。
3.1 实验动态仿真
本系统是在Windows11 系统下开发,采用Unit3D进行设计,运用C#语言,选择Mysql8.0.25 作为数据库存储相关数据。
(1)使用者通过电脑打开虚拟仿真系统,随后到达操作前的系统界面,如图13 所示。
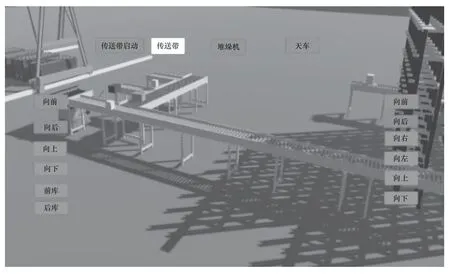
图13 系统操作界面按键
(2)通过想要实现的操作,利用操作界面的按键,完成目标设备的技术动作,例如堆垛机进行货物的出入库动作,如图14 所示。
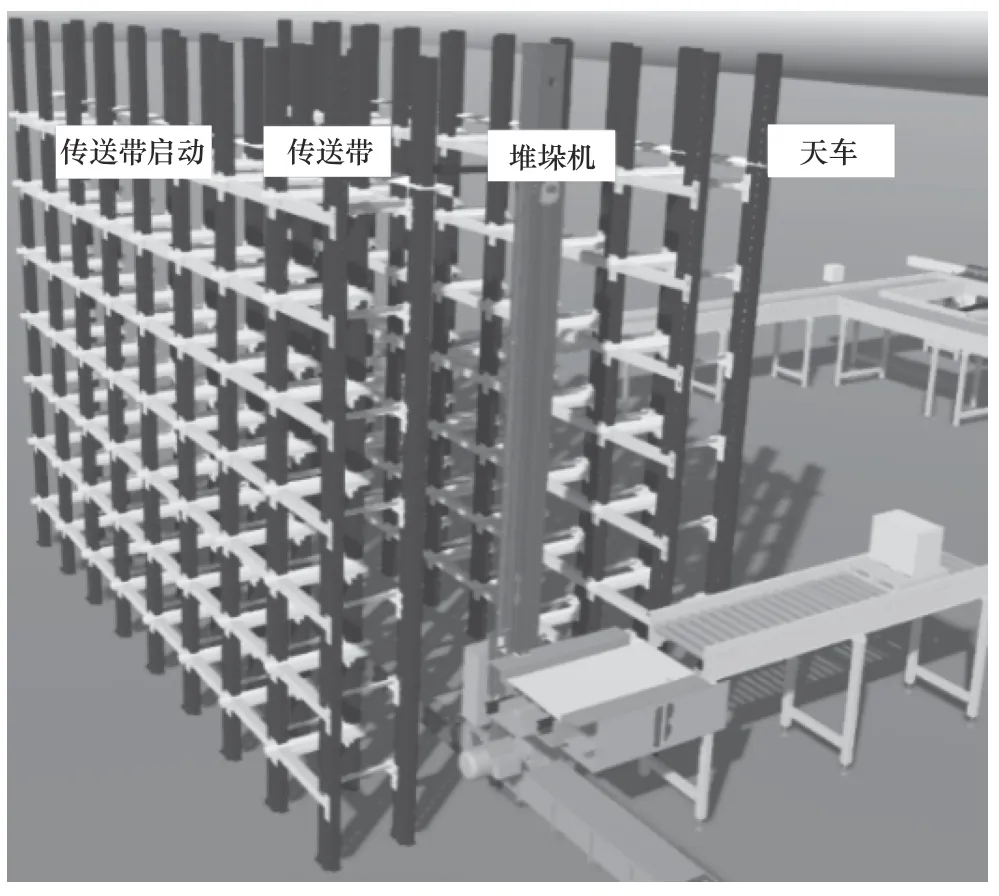
图14 通过按键操作堆垛机工作
(3)使用者完成物流运输的实验操作后,点击停止按键结束设备工作,点击退出按键后退出仿真系统,完成虚拟仿真系统的使用[8]。
对虚拟仿真实验系统的动作和智能物流实验中心的设备动作进行计时,仿真结果见表1。
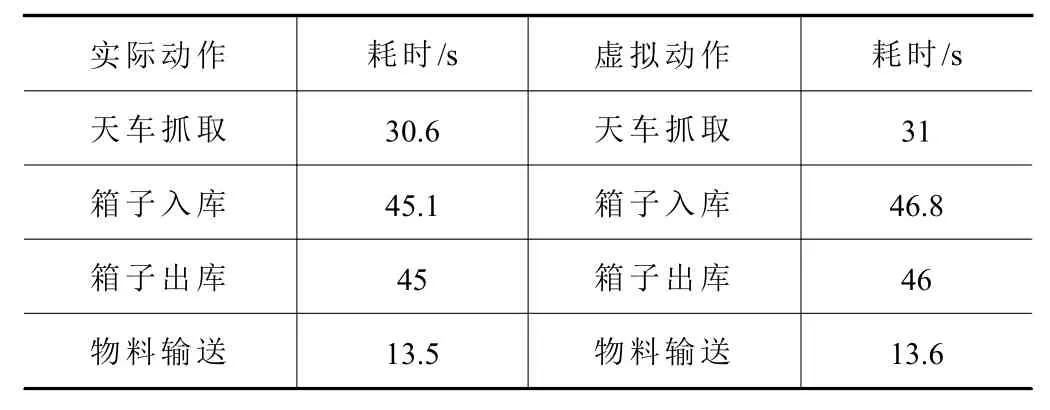
表1 设备实际动作和模型虚拟动作对比
由表1 中动作耗时对比,可以得到虚拟仿真实验系统与智能物流中心实际设备动作的延迟约为2 s,可以满足物流操作系统的教学任务。
通过数字孪生技术建立的云实验平台,仿真模型可以完成实体模型的动态仿真,动态仿真的数据来自智能物流实验中心设备的物理设计模型,还有设备上面传感器反馈的数据,以及设备多次运行的历史数据,即可以完成实验仿真和工作过程的全生命周期的实时监测[9-10]。如果需要做实验系统设计改动,或者想要知道实验系统在特殊外部条件下的反应,也可以在虚拟实验环境中进行“实验”。这样既避免了对实验设备的影响,也可以提高效率。
3.2 多并发用户操作安全问题
为了解决大量学生同时登录实验系统并保证安全性,选择Mysql8.0.25 作为数据库,将实验人员的相关实验数据存入数据库中,使用AES 加密算法对实验数据进行加密以确保实验人员数据的安全性,同时通过CP-ABE 加密算法对AES 密钥进行加密,使AES 密钥在传输过程当中不会被窃取并利用,从而保证AES 密钥的安全性,只有满足数据发送方所构建访问策略的实验人员才能完成AES密钥的解密,完成AES 密钥的解密后进一步完成数据的解密,从而保障了仿真系统使用过程中的安全性。
4 结语
本文主要针对智能物流实验中心进行研究,包括传送装置、堆垛机等设备,通过Unity3D、3DMax、S7-PLCSIM Advancde 等软件对实验设备进行处理,最后基于Unity3D 平台完成了虚拟仿真实验系统的设计。通过该物流虚拟仿真实验系统的设计,可以有效解决实验设备昂贵、实验设备有限,异地高校学生无法得到有效实操教学的问题,可以一定程度实现实验资源的共享,让异地其他高校的学生完成相同的教学内容。同时,通过此种交互操作的方式,也可以提高学生的学习兴趣,提高学习效率。随着工业技术的发展,虚实交互融合的技术会愈加深入,本次实验通过基于Unity3D 的物流运输虚拟仿真实验研究,在面对未来虚实交互技术的探索也有着研究基础和参考价值。
