基于数字孪生的航天发射塔摆杆机构故障诊断研究
2024-02-02曹进华洪瑛杰
曹进华,洪瑛杰,周 杰
(1.厦门大学嘉庚学院 机电工程学院, 福建 漳州 363105; 2.国防科技大学 信息通信学院, 武汉 430019)
0 引言
近些年,以“神舟”、“天宫”为代表的航天器发射任务频繁,发射场地面设施设备的可靠性和安全性显得越来越重要。发射塔电缆摆杆广泛用于航天发射塔架类大型母体建筑,用于支撑测试电缆、气管、风管等柔性材料。在发射前或必要时机,摆臂受液压动力驱动下进行变速往复运动[1-2],其可靠性直接影响发射任务能否顺利完成。而类似摆杆系统这一类大型机电液复杂系统,因其体积规模较大,原理结构复杂,在系统中作用重要,一旦发生故障,除了造成系统损坏,还可能带来人员伤亡和国际影响。
摆杆系统受限于历史故障数据不足,缺少规范有效的故障数据收集机制和成熟有效的质量监测管理技术手段,难以实现这类大型机电液系统的实时监测和性能退化预测。因此其状态监测与故障诊断一直是学术界关注的问题[2]。传统故障诊断主要利用时、频域分析等方法对被测信号分析处理,提取特征参量,进而对设备的性能状态进行模式识别。该方法较依赖物理实体故障注入、数据样本的收集和技术人员的工程经验,实施成本高,受条件约束多。
近几年,随着大数据分析、云计算、人工智能等技术发展,数字孪生技术的出现,提供了一种集成物理空间和虚拟空间的独特方法和技术手段[3]。根据2012年NASA宇航局基于新一代信息化技术的概念定义,数字孪生(digital twin)是充分利用物理模型、传感信息、历史趋势等数据,集成多物理量、多尺度、多概率的仿真过程,作为在虚拟空间中的实体产品镜像,数字孪生模型刻画并反映了物理实体产品的全生命周期[4]。随着物联网技术的发展,数字孪生凭借其数据驱动的特性与处理非线性动态和不确定性的能力,被应用于复杂系统远程监测、诊断、预测及健康管理。例如,陶飞等利用数字孪生技术实现了电厂发电机组机械设备内部的实时状态监测[5]。魏永合等利用滚动轴承三维空间孪生模型,有效还原了齿轮箱中故障轴承的真实运行状态[6]。杨文斌等对盾构机主驱动减速机提出了一种仿真数字孪生建模方法,实现了太阳轮的常见故障诊断[7]。
因此,针对摆杆系统的状态监测与故障诊断需求,拟采用数字孪生技术,利用图纸资料和实测数据,建立和完善摆杆机构的数字孪生体模型,研究基于数字孪生的摆杆机械结构故障诊断方法。通过典型故障案例,验证该方法应用于机电液复杂系统故障诊断的可行性。
1 摆杆机构数字孪生架构体系
数字孪生概念最早是由美国密歇根大学的Michael Grieves提出的,该技术是以数字化为手段创建与物理实体等价的数字模型,仿真和刻画物理实体在真实环境的属性、行为、规则等[4]。因此,数字孪生模型的建立,是数字孪生技术应用的核心任务。根据陶飞教授等[5]提出的“五维模型”,将摆杆机械结构孪生系统定义为“物理层、数据层、模型层、服务层、连接层”等5部分,如图1所示。物理层通过连接层的互联互通与模型层进行数据传输,在虚拟孪生体中进行仿真试验,并将仿真数据存储于数据层中,并以可视化形式展示,便于用户在服务层监测设备当前状态以及未来可能出现的故障预测,提前采取相应对策。

图1 摆杆数字孪生架构体系
1.1 物理层
物理层由驱动机构、传动机构、终端机构等部分组成,包括摆杆悬臂、齿轮齿条、立柱等物理实体部件,通过机械传动配合,完成发射前启停开合动作。另外,物理层还包括传感器等硬件,用于实时感知摆杆系统物理设备的运行数据,实现对摆杆系统的实时监测。
1.2 模型层
模型层是指数字虚拟模型,其中参数化虚拟模型主要是指表征几何形状、材料、约束、传动等物理特性的虚拟模型;机理模型通常是指表征质量、动量和能量等变化过程的数学模型;可视化交互界面主要是提供人机信息交互的界面。摆杆机构的参数化虚拟模型应当是摆杆机构物理实体的镜像映射,能够反映零部件之间的装配约束、仿真运动等功能;摆杆机理模型主要能够反映摆杆机构工作原理、动力学特性等。模型层是综合几何、物理、行为、规则等模型的集合体,它通过调用UG建模软件和有限元分析软件,进行动力学分析,将实时采集数据与仿真数据对比,改进模型,实现实时映射物理实体的运行状态。
1.3 数据层
数据层是孪生系统的关键,通常包含数据传输、处理和数据中心3部分。该层包含物理层、模型层在运行时产生的数据,以及各学科领域知识在内,推理规则、时空关联等融合数据,并可随着迭代数据的产生被不断更新与优化,以分析并描述数据间关联关系,生成融合信息与知识,为数字孪生体提供高价值数据和信息资源支撑[7]。
1.4 服务层
服务层主要是在数字孪生系统运行过程中,将需要的模型、数据、算法和仿真结果待进行封装,提供系统的功能性服务和对用户的业务性服务。功能性服务是指以工具组件、模块引擎的形式支撑数字孪生内部功能实现,而业务性服务是指以VR或AR的软件方式将仿真结果反馈给用户,以满足用户的需求。文中主要是对摆杆系统状态监测和故障诊断服务。
1.5 连接层
连接层通常是指基于TCP/IP通信协议,通过有线或无线形式,进行现场设备、服务端设备和服务应用端的远程数据传输和信息管理,完成孪生系统架构中各层间的信息数据传输。
2 摆杆数字孪生模型的建立
根据数字孪生模型理论,通过数字孪生技术对摆杆系统进行运动仿真建模,利用传感器实测数据与仿真数据对比,修正相关参数,完善数字孪生体的准确性,实现虚拟模型对物理空间的摆杆系机构实时交互映射,并对摆杆运行数据进行算法计算分析,对摆杆孪生系统开展运维服务,最后实现摆杆机构的状态检测和故障诊断,工作流程如图2所示。
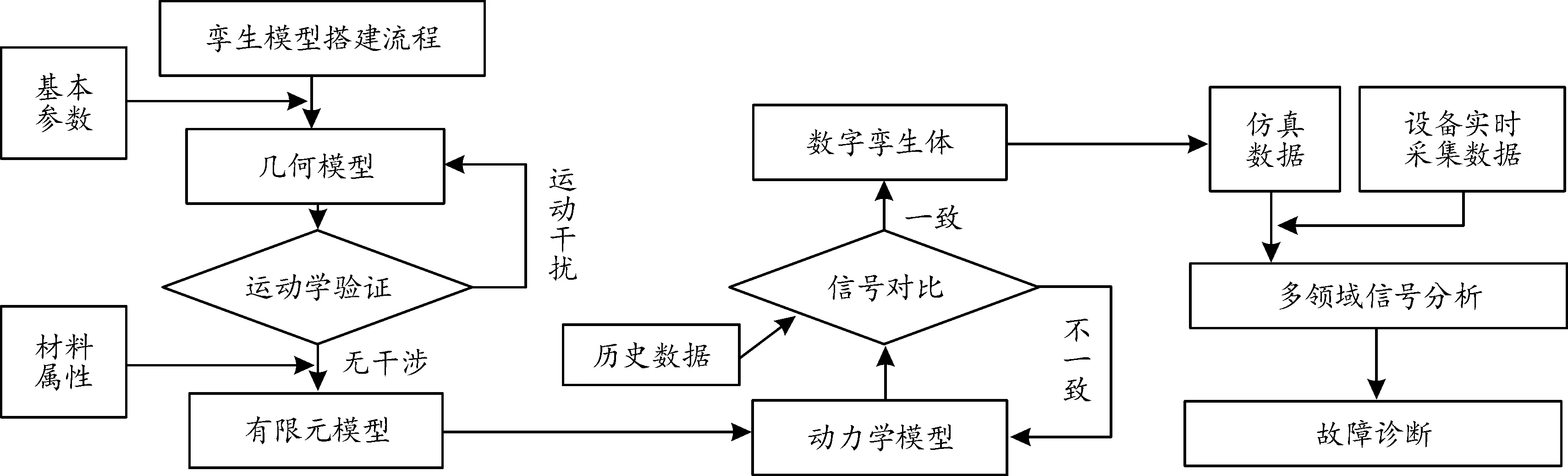
图2 孪生模型故障诊断流程
2.1 摆杆机构物理实体
电缆摆杆系统的式样为齿轮齿条驱动双转轴式,系统结构组成见图3。液压系统通过液压缸提供动力,液压缸活塞杆推动齿条,进而通过齿轮装置带动立轴转动,立轴与水平摆杆固连一体,同步转动完成开合动作。以其工作原理和运行特点为依据,进行测试传感器的选型和安装布局,制定试验方案,与数据采集硬件构成信息数据采集系统。此处,选取活塞杆到水平摆杆之间的机械部分和信息数据采集传感器一并构成了物理实体。
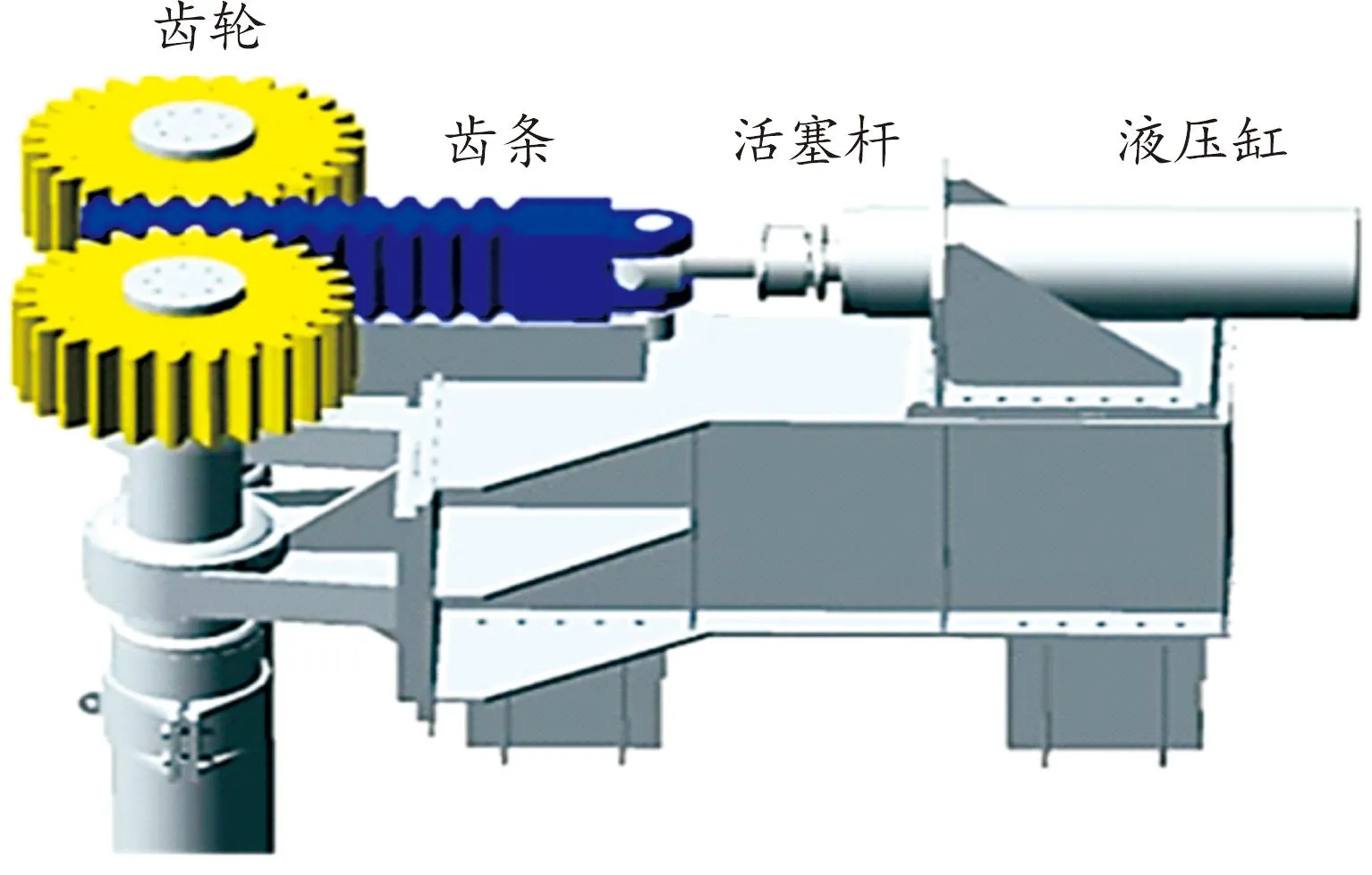
图3 摆杆机械工作原理 Fig.3 Operating principle of swing rod system
根据摆杆工作原理,综合考虑摆杆系统的空间布局、测点选择、传感器参数等因素,制定电缆摆杆测试方案,传感器布置和数据采集项目如图4、图5所示。试验过程中,该测试系统重点采集摆杆系统开合过程传动链上各部件的运动信息,以提供给数据层分析、优化和融合用。

图4 摆杆测试系统组成

图5 传感器安装位置
2.2 虚拟仿真模型
如前所述,虚拟摆杆系统是对实体摆杆系统的数字化表达,对物理实体从尺寸结构、装配关系、材料属性、模态特征等方面进行全方位、多尺度刻画描述。就摆杆系统而言,该虚拟模型要侧重能够反映运行规律、物理特性和行为规则等信息。为了保证虚拟模型与摆杆物理实体的全息映射,特别是对于我们关注的摆杆动力学特性方面,必须在建模过程中结合孪生数据和实测数据进行对比改进,优化虚拟模型。
首先,我们根据设计图纸提供的尺寸和材料参数,利用UG软件,构建虚拟模型,如图6所示。并利用其MCD组件,对其进行运动学验证,确保尺寸参数合格。
下一步,着手进行摆杆动力学模型仿真。由于摆杆机构是由空心钢梁、钢管、铝管等金属构件组成,采用铆接、螺栓、焊接和法兰盘等方式组装。考虑到外载荷及自重载荷等多种因素产生的弯矩对水平摆杆及竖轴的变形和应力有较大的影响,用梁单元来建立塔架摆杆系统的有限元模型。竖轴、摆杆部分连接关系见图7,其中固定约束用F表示,转动副用R表示,忽略螺钉、螺栓等安装的影响[10-11]。

图6 摆杆系统虚拟模型

图7 摆杆部分拓扑结构图
根据摆杆特点,适当简化,作以下近似假设:
1) 忽略垫片、螺栓等小零件的影响,水平杆型号相同,且等间距竖直分布;
2) 忽略液压力阶跃变化的冲击,及各种非线性因素的影响;
3) 忽略齿轮对摆杆系统转动惯量的影响;
4) 阻力矩在转动过程中保持不变;
5) 关于各构件弹性变形和系统结构阻尼等对竖轴转动的影响,通过齿轮和转轴之间的弹性阻尼铰进行等效考虑;
6) 轴承阻尼、空气阻尼或风阻对运动的影响,用转轴与轴承之间阻尼铰等效考虑;
基于上述假设,根据准静态法原理,见图8,可将摆杆模型视为刚体、弹性铰、阻尼铰组成的动力模型,其振动可视为整体刚性运动和由弹性铰的弹性变形引起的弹性振动的叠加[8]。根据文献[8],可知摆杆系统的工作过程中转轴末端角速度变化为二阶系统阶跃响应,动力学方程表达如下[6]

(1)
式(1)中:J为机械结构总转动惯量;ω为转轴末端的实际角速度;C为系统总阻尼系数;等于弹性阻尼铰的等效阻尼系数和阻尼铰等效阻尼系数之和;K为等效刚度系数;θ为将摆杆当作刚体的整体角位移。将上式进行变换,可得

(2)


(3)
式(3)中:H(s)为系统传递函数;Y(s)、X(s)分别为ω;Aμ为对应拉氏变换对;s为拉氏变换自变量。

图8 摆杆系统动力学模型
由图9可知,当液压缸活塞推力作用时间较短时,塔架摆杆转轴水平杆末端角速度变化呈二阶系统阶跃响应,摆杆开合过程中转动速度对阻尼大小比较敏感。也就是说弹簧阻尼的等效刚度系数K和系统总转动惯量J影响摆杆开合过程中的转动速度情况。

图9 二阶系统阶跃响应曲线 Fig.9 Step response curve of second-order system
塔架摆杆系统的竖轴及水平摆杆的大部分均使用20号钢作为主要材料,拥有完整半圆弧形的水平摆杆弧形顶端的3截弯曲段的材料为铝,根据发射场技术资料的具体材料参数和尺寸参数,根据此前动力学模型,将摆杆模型视为多刚体虚拟模型,利用ADAMS进行仿真分析,以验证虚拟模型的匹配度。将液压缸输出的液压力作为摆杆系统的输入信号代入,可以仿真得到摆杆打开过程中任意部位的运动和载荷数据。我们选取竖轴转速作为系统仿真的输出结果,将其与试验数据进行对比,作为改进数字模型的依据。
图10是摆杆竖轴角速度实测曲线与仿真曲线的对比,从图10中可以看出,实测曲线与仿真曲线在总体变化规律上吻合较好,试验曲线基频为0.47 Hz,仿真曲线基频为0.50 Hz,两者基本接近,但是仿真曲线波动幅值较小,曲线较平滑,高频成分的波动情况与试验结果相差较大。

图10 多刚体模型竖轴角速度对比
为进一步优化模型仿真结果的匹配度,在原有的多刚体模型基础上,将摆杆模型中的水平摆杆及竖轴设置为柔性体,将摆杆模型视为刚柔耦合模型,再次仿真得到摆杆竖轴转速曲线对比图(见图11)。柔体模型仿真得到的竖轴角速度曲线基频为0.46 Hz,与试验数据的0.47 Hz更加接近。而且速度波动变化趋势更加符合实测结果,说明刚柔耦合模型对于物理实体的匹配度要优于多刚体虚拟模型。

图11 刚柔耦合模型竖轴角速度对比
由此,根据物理实体实测数据和虚拟模型仿真数据间的信息交互对比,可得到一个改进优化后匹配度较好的虚拟模型。
2.3 孪生数据
孪生数据是指数字孪生体系各模块连接完成后,该体系中的所有数据,通常包括实测数据、仿真数据和服务数据[7]。就摆杆系统而言,该系统的实体数据应该包括摆杆机构外形尺寸、运行动作数据以及传感器实时采集的数据等。虚拟仿真数据包括物理模型、动力学模型在模拟和预测仿真产生的数据。服务系统数据包括摆杆系统的运行记录、仪器设备监视数据等摆杆系统的运维、历史数据。图12、图13分别是虚拟孪生模型仿真所得打开过程中,水平摆杆根部受力和齿条受力情况。这些数据能够反映物理实体工作情况,辅助摆杆物理实体真实故障诊断[12-13]。

图12 打开过程中水平摆杆根部受力曲线

图13 打开过程齿条受力曲线
3 实验验证
数字孪生技术在故障诊断方面先进性主要体现为:一是成熟孪生体模型能够通过修改模型参数,完成故障类型注入,准确真实模拟物理实体故障现象和故障特征,以实现故障诊断;二是以更低成本提供故障排除和系统改进方案的验证。为进一步验证数字孪生体在故障诊断方面应用的有效性,选取了摆杆系统典型故障—喘行问题进行虚拟仿真验证。
摆杆喘行故障原因是活塞杆与齿条间销连接为间隙配合,导致传动过程液压缸阻尼力无法起作用,液压阻尼效应失效[14-15]。通过修改虚拟模型中活塞杆与齿条连接销尺寸,将配合间隙设置为1.2 mm,完成数字孪生体的故障注入。仿真后得到竖轴角速度曲线, 间隙条件下竖轴角速度仿真与实测曲线对比如图14所示。对图11速度曲线进行傅立叶频谱分析,得到其基频为0.48 Hz,该仿真结果的幅值与频率与试验值0.46 Hz接近,相对误差为4%。为进一步验证虚拟模型的有效性,在齿条运动方向,设置了250、500、750 N/(m/s) 3种水平的阻尼器,得到不同阻尼水平下竖轴角速度曲线,如图15所示,可以看出,增大阻尼系数,提高系统阻尼,能够有效缩小竖轴角速度的波动幅值和稳定时间。以上进一步证实该虚拟模型在故障诊断方面的有效性。

图14 间隙条件下竖轴角速度仿真与实测曲线

图15 不同阻尼水平下竖轴角速度
4 结论
以摆杆机械系统为典型对象,构建了复杂机电液系统数字孪生体,研究了数字孪生技术在机电液复杂系统状态监测与故障诊断的应用,并利用典型故障实测信号进行了验证。主要结论如下:
1) 根据数字孪生“五维模型”,利用UG和ADAMS软件建立几何三维模型和动力学模型,并通过ANSYS有限元仿真,结合试验系统测试数据,完成了摆杆机械系统数字孪生体的构建,解决了复杂机液系统在计及柔性的情况下的数字孪生体构造问题。
2) 结合摆杆喘行典型故障,利用实测数据检验了摆杆数字孪生系统的有效性,其故障模拟精度达96%,实现了大型机电液复杂系统可视化故障诊断工程应用。