滑移转向无人车轨迹跟踪控制策略研究
2024-02-02娄岱松朱纪洪杨嘉睿许志伟毛汉领
娄岱松,朱纪洪,杨嘉睿,许志伟,毛汉领
(1.广西大学 机械工程学院, 南宁 530004; 2.清华大学 精密仪器系, 北京 100084)
0 引言
地面无人驾驶战车,也称“陆基无人军事平台”(unmanned ground vehicle),其英文缩写UGV[1]。面对未来无人化、智能化、快速化的新型军事战争模式转变,对陆基车辆装备提出了更智能、更灵活的要求[2]。
滑移转向UGV取消了传统的转向机构,每个车轮由轮毂电机独立驱动,依靠两侧车轮之间的力矩差来完成车辆的转向动作[3-4]。这种形式的车辆拥有更小的转弯半径,可以完成零半径的原地转向。这种特性有助于UGV在复杂环境下灵活脱困,在战场具备快速反应能力而日趋受到各国重视[5-6]。
由于滑移转向车辆在小曲率、高速转向时易发生车轮变形以及车轮打滑等现象,车轮的横向力会随滑移率的升高非线性下降,致使车辆的差速驱动力矩和横向阻力矩失衡,造成车辆横摆角速度突变而难以控制[7]。因此滑移转向车辆虽然理论上有更广的转向半径可控范围,但相对于传统车辆,对于横摆角和横摆角速度的控制难度更高。如何解决车轮横向力的非线性变化问题,使车辆转向力矩与阻力矩达到动态平衡,从而最终减小车辆横向误差,是滑移转向UGV横向控制的重点和难点。
无人车轨迹跟踪控制主要有基于几何法的纯跟踪控制和Stanley控制、比例-积分-微分控制、预瞄跟踪最优控制、LQR最优控制、模型预测跟踪控制等。当前,国内外学者大多研究集中于如何在传统LQR和模型预测控制的基础上继续改进,以满足跟踪控制精度要求的提高[8-9]。滑移转向无人车与传统前轮转向无人车的动力学模型差异较大,因此滑移转向无人车不能直接使用传统轨迹跟踪控制方法,目前针对滑移转向构型的无人车轨迹跟踪控制研究相对较少。
由于滑移转向UGV在转向运动中轮胎横向力的非线性变化特性,传统比例积分微分控制(PID)技术难以满足滑移转向车辆横向控制的需求。为解决上述问题,文献[10]中使用模糊控制策略,设计了位置环和速度环的双环轨迹跟踪控制策略,仿真结果显示在此算法控制下,车辆能够较好地跟踪期望的路径,但此算法在建模过程中未考虑滑移转向车辆的非完整性约束特性。文献[11]在算法中引入门控双极模型,同时对车辆的加速度进行限制,较好地解决了滑移转向横摆角速度的跟踪误差。文献[12-15]中采用滑模控制方法进行轨迹跟踪控制,通过选用合适的趋近律函数和自适应算法结合的思想,都取得了较好的控制效果,但这些工作都没有考虑到轮胎模型引入的非线性动力学特性,且仿真结果均基于数学解析模型,没有使用专门的动力学软件进行仿真验证。
本研究中通过搭建滑移转向UGV动力学和运动学模型,提出了一种基于LQR的轨迹跟踪控制策略,并在速度环设计了一种自抗滑移的前馈控制。通过Simulink和Trucksim联合仿真验证了在该控制策略下,车辆在轨迹跟踪过程中横向误差可以快速收敛,最大横向误差小于传统PID控制,同时保证了车辆跟踪平稳、横向位移振荡小,控制稳定性优于普通的滑模控制。
1 滑移转向速度环前馈控制
车辆轨迹跟踪最终效果为无人车以给定的速度跟随给定路径行驶。由几何关系确定路径上的目标点,并通过横向控制使车体趋近该点,参考横摆角速度根据实时曲率确定、无需考虑纵向速度控制[16]。在速度环控制设计中,通过对车辆动力学建模,分析横摆角速度与电机转向力矩的对应关系。
1.1 滑移转向无人车动力学分析
车辆的平面运动可以解耦为:车辆沿轴线的直线运动和绕中心的转动。相应地将轮毂电机的力矩分解为使车辆平动的直线力矩M1和使车辆转动的转向力矩M2,为方便表达,将左侧电机的力矩统一表示为M1+M2,右侧电机的力矩表示为M1-M2。
建立8×8滑移转向无人车动力学模型如图1所示,左侧和右侧车轮形成的力矩构成车辆转向的驱动力矩,地面对轮胎的摩擦力与轮胎侧偏力形成转向阻力矩。
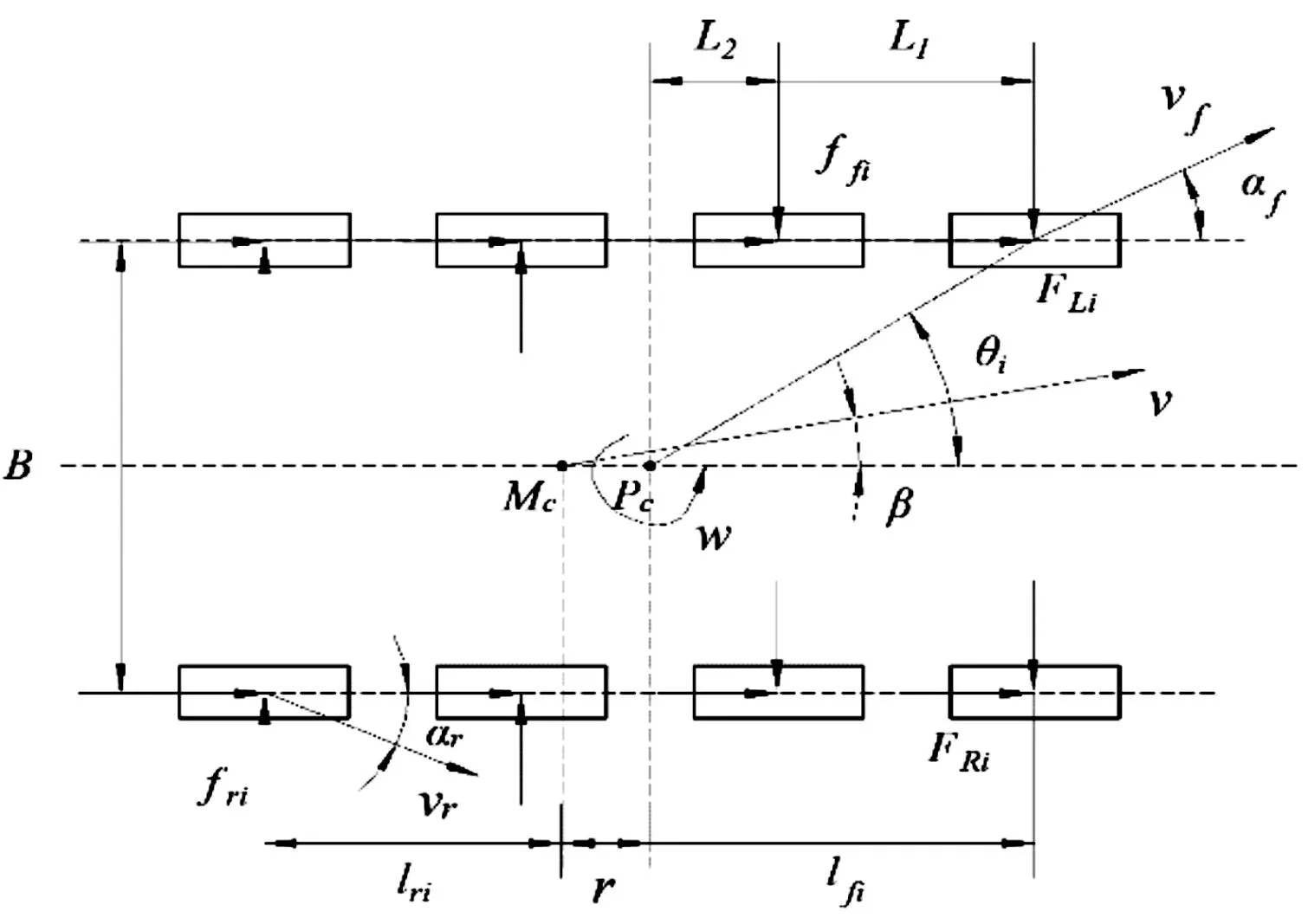
图1 8×8滑移转向无人车动力学模型
图1中Pc和Mc分别为车辆几何中心和质心,r为几何中心与质心的距离,Li和B分别为车辆轴距和轮距,ffi和fri分别为前轴和后轴轮胎侧偏力。FLi和FRi分别为左右侧车轮驱动力,二者差值形成使车辆绕中心转动的驱动力矩。在轮胎侧偏的影响下,造成车辆实际速度方向偏离车体坐标系的x轴一个夹角,即质心侧偏角β。
设车辆转动惯量为Iz,此时存在横摆动力学关系有:

(1)
轮毂电机实际输出力矩与理论值间会有差异不等的微小误差,一般需要额外标定补偿,为简化计算,对模型进行合理简化,有以下假设:① 所有轮毂电机视为理想电机,忽略不同电机间的差异性;② 车轮滑移率较低,且车轮的驱动力由电机提供。车轮驱动力表达式为

(2)
式(2)中:MLi、MRi为左侧电机力矩、右侧电机力矩;e为减速比;η为传递效率;R为车轮半径。
轮胎抵抗塑性变形产生的轮胎侧偏力形成滑移转向的转向阻力矩,当轮胎侧偏角不大时,可近似将轮胎侧偏力与侧偏刚度视为线性关系。轮胎侧偏力表达式为:
fi=Cαα
(3)
其中

(4)
式(4)中:Cα为轮胎侧偏刚度;αf、αr为前轴轮胎侧偏角、后轴轮胎侧偏角;li为各轴到车辆质心的距离;vx为车辆直线速度;ω为车辆横摆角速度。
当车辆达到平衡状态,横摆角加速度为零,将式(2)—式(4)代入式(1)并化简有:
(5)
化简后的式(5)中Θ为由各车辆参数组成的常系数,可得知在轮胎侧偏角不大的固定线速度下,滑移转向车辆的横摆角速度与电机转向力矩呈线性关系。
1.2 自抗滑移的前馈控制设计
由于独特的转向机制,在实际中滑移转向车辆的轮胎侧偏角往往大于传统车辆,这也导致轮胎侧偏力与侧偏刚度将进入非线性区间。此外,除了轮胎抵抗变形的力,地面给轮胎的摩擦力也会形成车辆转向的阻力矩。分析可知,车辆的转向阻力矩为多因素耦合、非线性变化的复杂变量。
使用Simulink与Trucksim联合仿真,分析不同线速度和转向力矩组合情况下,车辆稳定后的横摆角速度。并利用仿真数据点重新对式(5)进行修正及改进。通过数据处理分析,发现引入vx/ω的二次项将更符合数据点变化趋势。改进后有:
(6)
式(6)中:A、B分别为需要调节的二次项常系数和一次项常系数。如图2所示,改进后的公式与仿真数据点具有良好的拟合效果。

图2 改进公式曲面与仿真数据点对比
由于随着速度升高,车轮滑移率逐渐上升,轮胎横向力呈非线性下降趋势[17]。因此在高速大滑移情况下,式(6)无法很好地表征电机转向力矩与横摆角速度关系。引入车轮滑移率参数进一步修正,修正后完整的电机转向力矩控制算法为

(7)
式(7)中:s为车轮滑移率;C为滑移惩戒因子(C>1);t为低通因子(t>1)。
车辆运动控制器通过轮毂控制反馈的车轮轮速信息,计算出每个车轮当前的滑移率。在力矩分配层对处在高滑移率状态车轮对应的轮毂电机分配更小的驱动转矩,同时通过设置低通因子减弱对低滑移率轮毂电机的影响。总体效果为:当某个车轮发生严重打滑,减少其分配到的驱动力矩,使其转速下降、滑移率降低,直至达到动态平衡,从而起到车轮自抗滑移的控制效果。
2 基于LQR的轨迹跟踪控制策略设计
线性二次性调节器LQR算法在传统阿克曼转向车辆的横向最优控制中已得到广泛应用和检验[18-19]。但有异于阿克曼转向车辆,滑移转向无人车没有转向机构,因此无法将前轮转角做控制量,在控制算法的设计思路中有较大差异。本研究中提出了一种将LQR算法,应用于滑移转向无人车轨迹跟踪控制的新思路。
2.1 滑移转向无人车运动学分析
在笛卡尔坐标系下建立车辆运动学模型,推导其在参考预瞄点Pr下的运动轨迹控制方程,滑移转向无人车运动轨迹控制模型如图3所示。
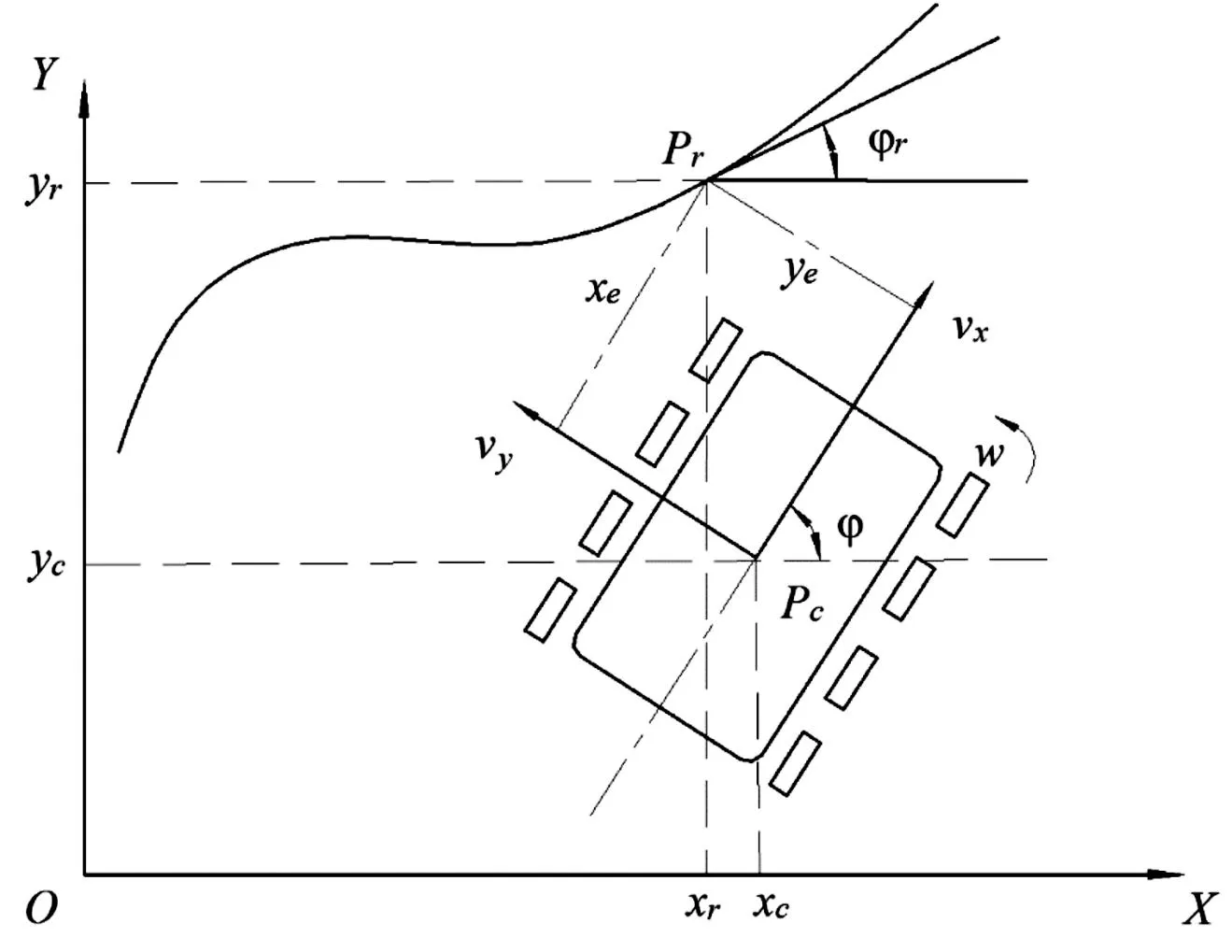
图3 滑移转向无人车运动轨迹控制模型
搭建车辆运动学方程为:
(8)



(9)

(10)
(11)
将式(10)、式(11)代入式(9)有
(12)
ωr=K·vr
(13)
式(13)中:K为参考点处的轨迹曲率。
2.2 基于LQR算法的最优控制
在实际控制器部署需要对连续系统的控制律离散化,使用前向欧拉公式,对式(12)改写并整理得:
(14)
通过LQR算法同时对状态量和控制量进行多目标最优控制,目标函数可以表示为跟踪过程累计的跟踪偏差和累计的控制输入偏差的加权,其中Q为状态量加权矩阵,R为控制量加权矩阵。设其代价函数有
(15)
式(15)中:Q、R均为对角矩阵;Jmin的控制量有解为:
u=-[(R+BTPB)-1BTPA]X=-kX
(16)
P=ATPA-ATPB[(R+BTPB)-1BTPA+Q
(17)
对式(17)的黎卡提方程迭代求解即可求解出P矩阵,代入式(16)控制方程可得反馈系数k。
2.3 轨迹跟踪控制综合策略设计
LQR算法本质是找到一组控制量,使得同时满足状态量足够小(系统达到稳定状态)和控制量也足够小。矩阵Q越大,车辆的状态量即横向误差收敛越快;矩阵R越大,车辆的控制输入量即横摆角速度误差越小。Q、R2个参数矩阵相互影响,状态量的收敛速度和控制量输入大小控制不能兼得。
通过设计速度环的前馈控制使车辆快速响应到预期横摆角速度,可在LQR估计器的控制参数中设置更小的R矩阵元素。通过这种复合控制策略,可以有效减小车辆横摆角速度误差、提高轨迹跟踪中的稳定性,而不影响控制的横向误差精度。
由此,可得到滑移转向无人车轨迹跟踪控制综合策略如图4所示。
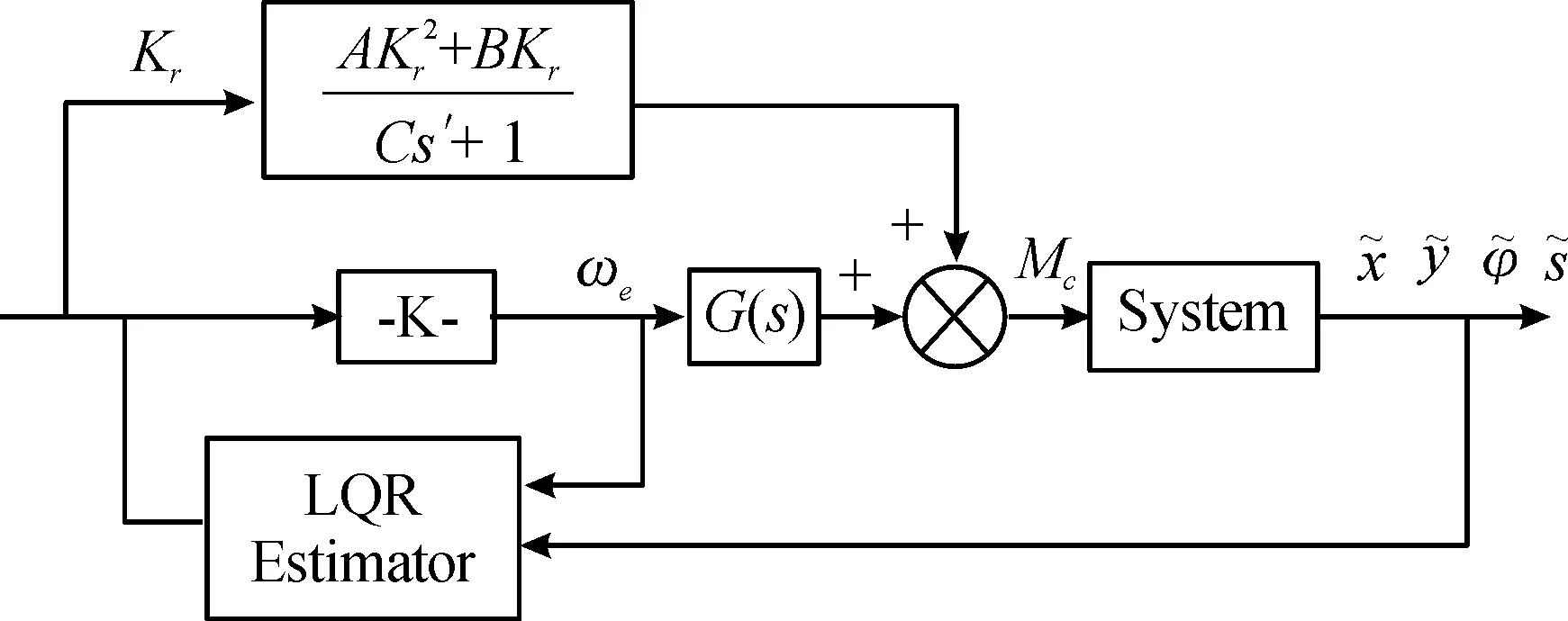
图4 轨迹跟踪控制综合策略框图
3 仿真验证
通过在Trucksim中设置车辆参数以及环境参数、在Simulink中搭建外围控制算法,由Matlab的Automated Driving Toolbox生成目标轨迹,对轨迹点信息以及其他参数进行预处理,进行联合仿真,并与双PID控制算法以及文献[12]中设计的滑模控制算法进行对比,验证本文算法的控制效果。
3.1 轨迹跟踪横向控制性能分析
选取某八轮滑移转向无人车作为建模对象,其部分车辆参数如表1所示。
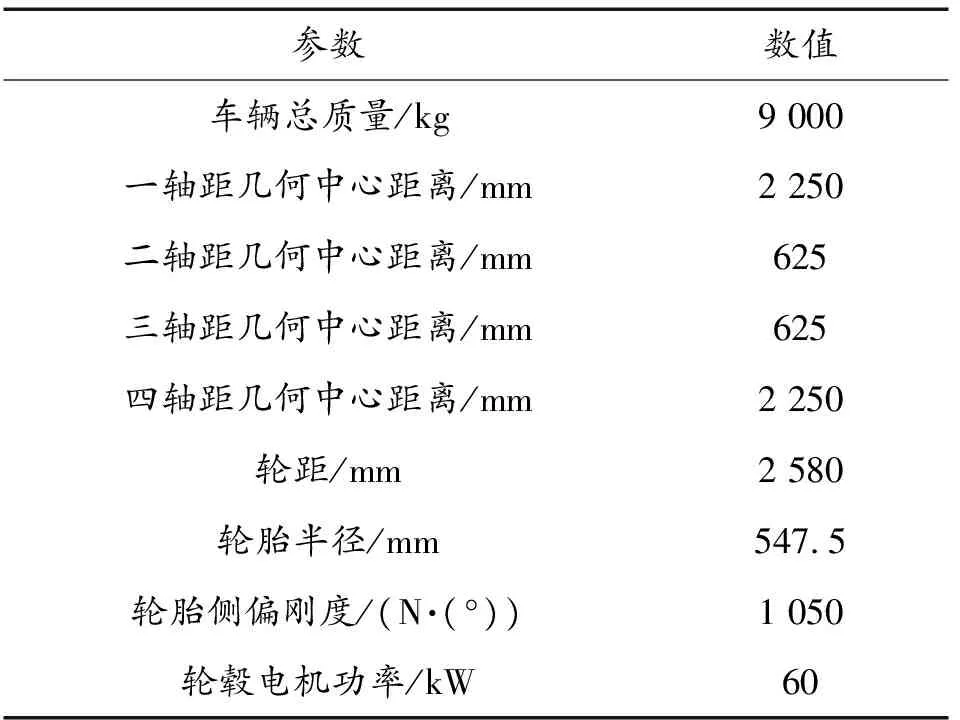
表1 某无人车部分车辆参数
构建直线距离160 m的车辆双移线测试工况,并将数据导入Simulink模型。车辆运行仿真环境基本参数如表2所示,规划轨迹位移如图5所示。
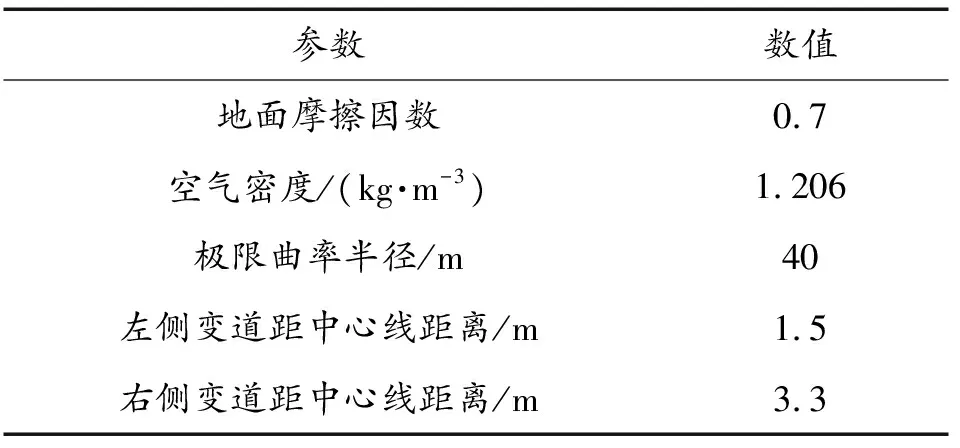
表2 仿真环境基本参数
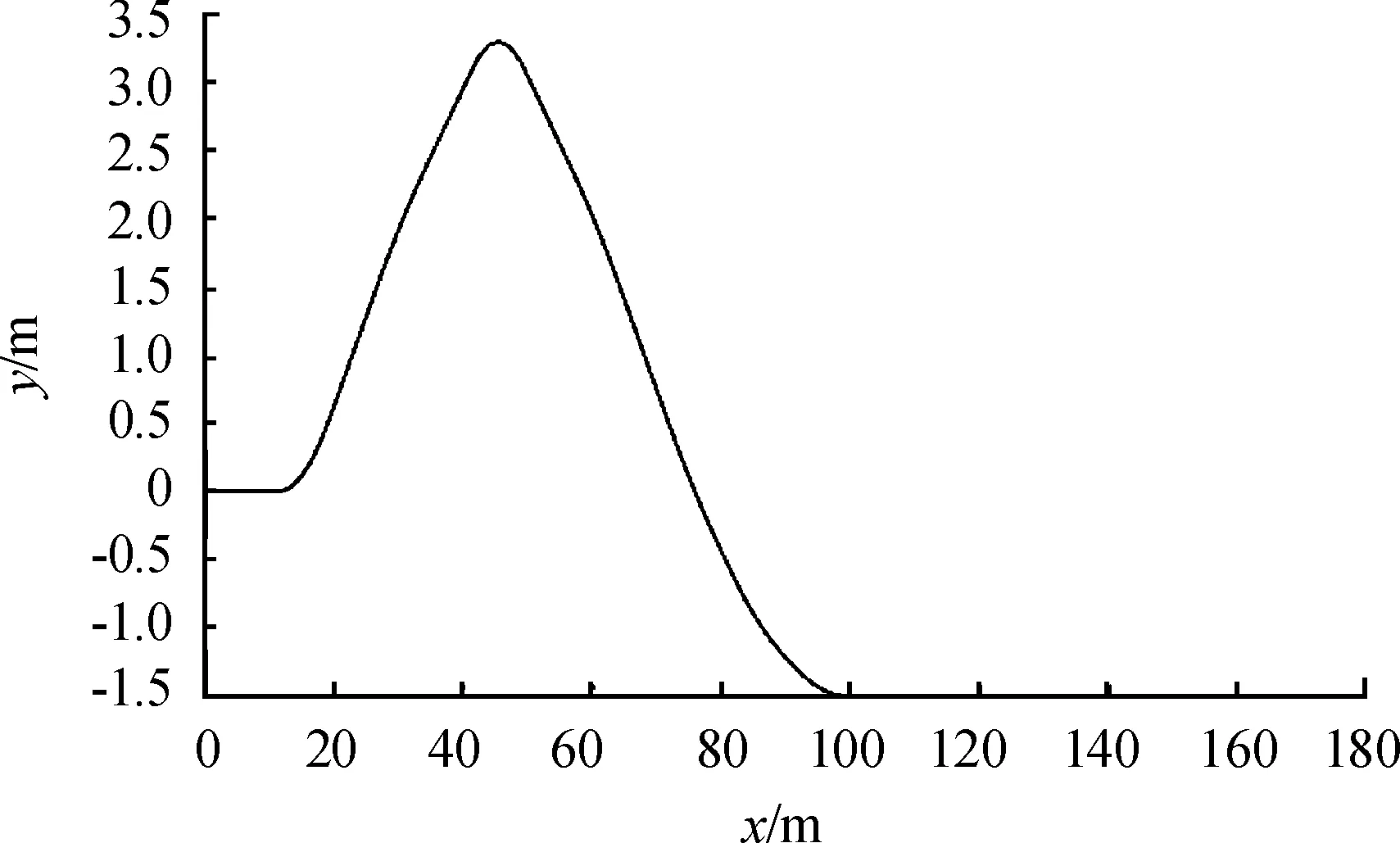
图5 规划轨迹位移
设仿真时间20 s,车辆直线速度为8 m/s,搭建文献[12]改进后的滑模控制算法和普通双PID控制算法,与本研究中设计的控制策略进行横向误差对比分析,车辆的横向误差曲线对比如图6所示。

图6 横向误差曲线对比
根据图6可知,在LQR+自抗滑移的前馈控制下,滑移转向无人车最大跟踪横向误差约0.078 m,在第17.9 s可达到稳态并收敛至0。如表3所示,在本文中设计的轨迹跟踪控制策略下,无人车最大横向误差比在双PID控制下小0.086 m,误差收敛速度快约2.1 s。在最大横向误差相近的条件下,设计策略稳态误差振荡幅值比滑模控制小约0.05 m。
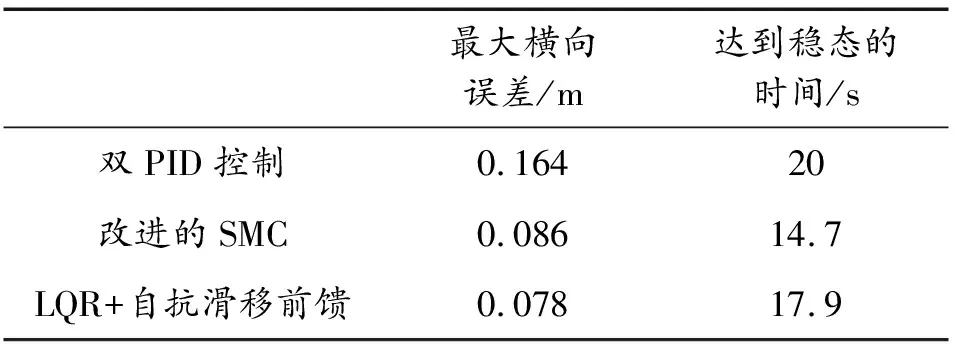
表3 横向控制性能指标对比
3.2 算法鲁棒性分析
分析在不同条件下本文设计算法的鲁棒性,改变地面摩擦因数和无人车纵向跟踪速度,在本文控制策略下,无人车在不同速度和地面摩擦因数的横向误差如图7和图8所示。
仿真使用的算法参数,是以车辆8 m/s的纵向速度进行设计和调参,根据图7的仿真结果所示,车辆纵向速度对轨迹跟踪的横向误差控制存在较小影响,且基本不会影响误差收敛的速度。当算法中的参数固定不变时,速度降低或升高都将导致最大横向误差有一定的上升,在未来的工作中可进一步研究根据车辆反馈的速度信息对算法参数进行动态调整,从而减小车辆纵向速度变化对算法横向控制效果的影响。
根据图8所示,随地面摩擦因数变小,无人车最大横向误差小幅增加。相同其他条件下,当地面摩擦因数为0.8时,车辆最大横向误差约0.085 3 m,当地面摩擦因数为0.5时,车辆最大横向误差约0.097 7 m,地面摩擦因数对算法控制精度影响不大。车辆纵向速度一定,地面摩擦因数下降,车辆横向误差收敛为零的速度不变。综上所述,本文中设计算法策略具备较好的鲁棒性,能够较好地抵抗环境变化对算法控制精度的影响。
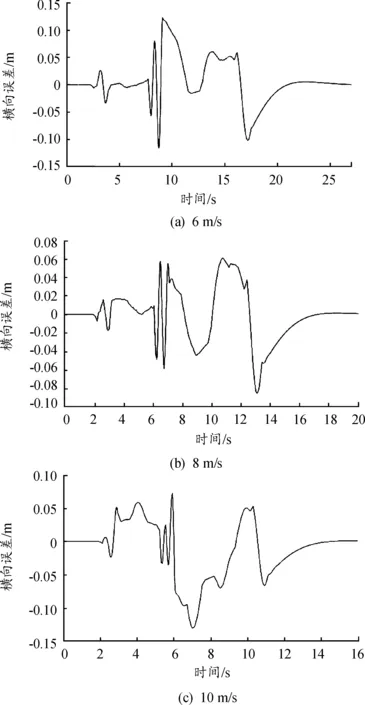
图7 不同纵向速度下横向误差变化

图8 不同摩擦因数下横向误差变化
4 结论
通过建立和分析滑移转向无人车动力学和运动学模型,提出了一种针对滑移转向构型无人车的轨迹跟踪控制策略,对LQR最优控制算法进行改进,在速度环采用自抗滑移的前馈控制。由于速度环的前馈控制可使车辆快速响应到预期横摆角速度,在LQR估计器的控制参数中可以设置更小的R矩阵元素,使得改进后的控制算法有效提高轨迹跟踪中的稳定性,并且不影响控制的横向误差精度。通过联合仿真实验,验证了本研究中提出的轨迹跟踪控制策略相对于滑模控制和传统双PID控制,轨迹跟踪过程中最大横向误差更小、车辆稳定收敛速度更快,能够较好地抵抗环境变化对算法控制精度的影响、鲁棒性较好。滑移转向无人车轨迹跟踪控制策略对于未来独立驱动轮式军用车辆控制研究具有积极现实意义,未来可将车辆速度信息引入算法参数的自适应调整,以进一步提高算法鲁棒性。