基于智能手机内置传感器的地铁车站级定位∗
2024-01-26陈世一牛小骥
陈世一,旷 俭,牛小骥
(1.武汉大学测绘学院,湖北 武汉 430079;2.武汉大学卫星导航定位技术研究中心,湖北 武汉 430079)
城市轨道交通以其运载量大、速度快、便捷性高等优点,成为大城市公共交通的首选之一[1]。地铁运行时,为提醒乘客及时下车,地铁运营方往往通过车内语音播报、路线图显示等方式告知乘客当前位置。然而,在人流高峰期,地铁内环境嘈杂,车内播报信息容易被噪声淹没,从而无法被乘客准确地接收到;同时也会造成乘客精神高度紧张,难以获得轻松惬意的乘车体验。因此,利用乘客自身携带的智能手机等移动电子设备实现地铁的车站级级定位,可以提前提示乘客即将到达的地铁站,有效地改善用户出行体验[2]。
智能手机内置了丰富的传感器,例如GNSS 接收机、加速度计、陀螺仪、磁力计、WIFI、蓝牙等[3],这为实现地铁定位提供了物理可能性。然而,地铁运行环境大都是地下隧道,GNSS 因信号无法穿透到地下隧道而无法正常工作[4-5],同时地下隧道环境中缺少连续可靠的无线射频定位信号,从而导致没有足够的定位信息源支持地铁精准定位。因此,基于智能手机的地铁定位研究,主要集中在地铁车站之间的车站级级别定位。
针对地铁车站级定位需求,很多研究工作者已经做了相应的尝试。文献[6-7]将地铁站间的距离作为特征指纹,对智能手机内置的加速度计观测值积分,估计两个站间的距离,最后与数据库中的站间距离指纹做匹配,实现车站级定位。文献[8]使用智能手机中内置的气压计观测的气压值构建指纹库。文献[9]使用磁场强度变化检测地铁的到站情况,并根据磁场强度匹配实现站点识别。然而,由于手机内置传感器的精度差,加速度积分得到的速度误差将会迅速累积,无法得到有效的距离估计值;地铁站间无明显高度差,不同站点位置的气压值无明显差别;磁场特征维度低(最大3 维)[10],且容易受到地铁内部的铁磁性物体影响,磁场匹配方法无法提供可靠的车站级识别结果。
另外,某些区域的地铁环境还安装了用于通讯的移动信号基站,部分研究将移动信号(如GSM 和WiFi 等)和站与站之间的数据特征结合[11]。文献[12]通过将到站时刻的三轴加速度计方差均值与GSM 信号强度结合作为相关性指标进行匹配实现车站级定位。然而,由于信号基站的布设密度与人口相关,商业区密度高,非商业区密度低,在人口稀疏的地区,通过检测车站的移动信号进行地铁车站级定位在一些情况下并不适用。同时由于地铁隧道深入地下,4G5G 信号会存在普遍的直射信号遮挡与严重的多径反射效应,这也会进一步影响其定位精度和可靠性,尤其是在地铁车站前后,往往难以区分是在哪一边。
由于地铁行驶路线基本固定不变,地铁在同一路段行进时的运动状态和周围环境的变化存在很好的重复性。而这些运动特征和环境磁场特征都能够使用智能手机内置惯性传感器和磁力计很好地感知到。基于此,本文设计并实现了一种基于智能手机内置传感器的地铁车站级定位算法,利用智能手机传感器对地铁的运动特征以及地铁隧道的环境信息进行特征提取,构建站间特征数据库,并使用动态时间规整(DTW)进行特征匹配[13-14],实现了智能手机端的高准确率的地铁车站级定位。
1 算法框架
图1 给出了基于智能手机内置传感器的地铁车站级定位算法示意图,包括特征选择、数据库构建、匹配定位。特征选择模块,使用智能手机的内置传感器采集地铁运动过程中的加速度、角速率和周围磁场强度,利用加速度和角速率进行姿态解算,使用姿态角提取传感器数据的水平投影;然后,对姿态角和投影后传感器数据的位置区别度进行分析,选择合适的特征构建地铁车站级定位特征数据库。数据库构建模块,计算各地铁路段的特征,给特征打上站名标签。匹配定位模块,计算数据库中所有特征与待确定路段的特征的相似性,将各特征的相似度进行组合分析,判断待确定路段的真实站点,从而实现地铁的车站级定位。

图1 基于智能手机内置传感器的地铁车站级定位算法框架
1.1 特征选择
本文提出的地铁车站级定位算法不依赖于单一历元的数据点,而是地铁在行驶过程中的一段数据,因此数据特征应满足时间连续性与独特性(即位置区分度)。其中,满足上述要求的传感器主要包括惯性传感器、磁力计、气压计和光强计等。惯性传感器的输出数据可以反映地铁的运动特征,磁力计、气压计与光强计可以得到地铁周围的磁场、气压与光强信息。由于地铁环境复杂,气压和光强受到的影响较大,稳定性较弱,不予考虑。本文对惯性传感器观测值、磁力计观测值、估计的水平姿态角等数据进行可视化分析,最终确定将横向角速率、垂向磁场强度、横滚角和俯仰角作为地铁车站级定位算法的特征。
1.1.1 特征提取
本文采用相邻两个站点之间的传感器数据序列作为最小单元特征,因此需要将地铁的静止(即停靠站台)与运动状态进行区分。其中,在地铁运动开始或停止瞬间,陀螺仪的输出会有一个显著跳变,此时通过检验跳变时刻即可将地铁静止与运动状态进行准确区分。在获得时间段后,本文使用水平姿态角将原始传感器观测值投影到当地水平坐标系。这样做的目的是在于消除手机持握方式变化带来的影响。
本文采用姿态航向参考系统(AHRS)估计智能手机的当前姿态角[15-16]。AHRS 的基本思路是使用陀螺仪连续递推得到当前时刻的姿态角,加速度计和磁力计观测值被用于控制水平角和航向角漂移。根据更新前一时刻的姿态角,结合惯导积分,计算得到当前时刻的姿态角,并由此得到当前时刻的重力场方向:
式中:vG为重力场方向,q=[q1q2q3q4]T为四元数。利用地铁在行进过程中的加速度输出,对当前时刻的角速率G进行补偿
式中:eInt 为随时间积累的补偿项,e为补偿向量,Kp,Ki为互补滤波的补偿系数,dt为时间间隔。利用补偿后的角速率,对前一时刻的姿态四元数进行递推,得到当前时刻的姿态四元数q。
式中:姿态四元数的初始化阶段,利用地铁在车站停靠时加速度计原始输出计算得到横滚角r0和俯仰角θ0:
由于只需要地铁在行驶过程中的相对航向变化,本文初始航向角ψ0设置为0。为了更直观地分析姿态变化的规律,我们使用欧拉角形式描述姿态,四元数转换到欧拉角形式的公式为:
式中:φ、θ和ψ分别为横滚角、俯仰角和航向角,姿态的欧拉角形式。同时,考虑到姿态不同,陀螺仪、加速度计和磁力计观测值会发生明显变化。本文将传感器原始观测值投影到当地水平面:
由于传感器的采样频率较高(例如100 Hz),且地铁在两站之间的运行时间约为2 min~3 min。此时,利用原始采样率的特征进行定位会带来巨大的计算量,同时并不会带来明显的匹配精度提升,因此需要对特征进行降采样处理。数据降采样方法为:将一段特征分成n等份,并对单份的特征进行平均处理获得一个数值,最后单一特征的数据量减少至n个采样点。
1.1.2 特征分析
由于地铁的运动情况在直线路段与曲线路段存在差异,因此将两种路段的特征表现分开进行讨论。本文对武汉市城市轨道交通的某一直线路段与某一曲线路段的特征变化进行分析,通过地铁在运动过程中的数据表现来选择用于进行匹配定位的特征。图2 和图3 所示分别为直线路段和曲线路段的特征可视化结果。
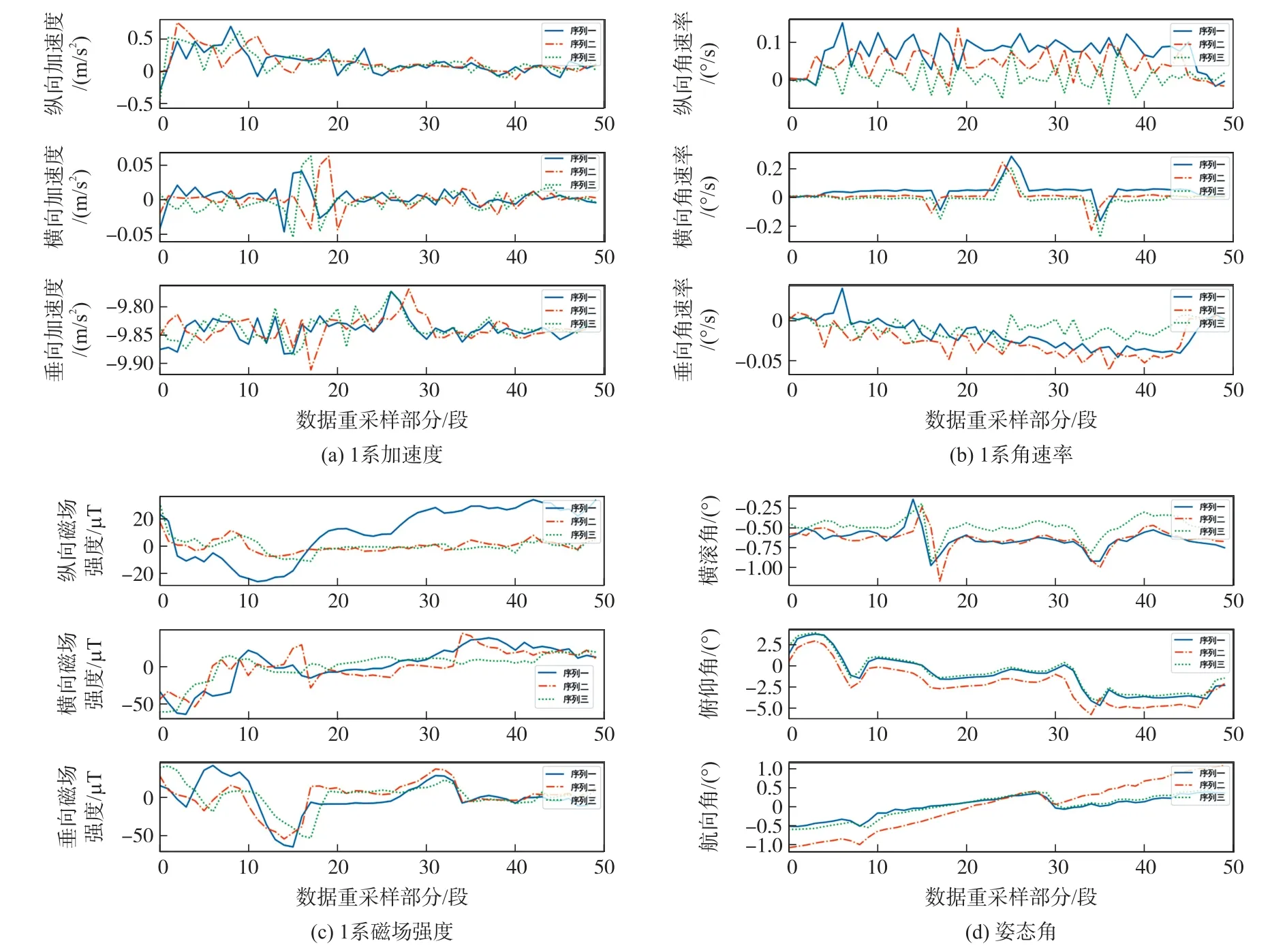
图2 直线路段的数据特征可视化
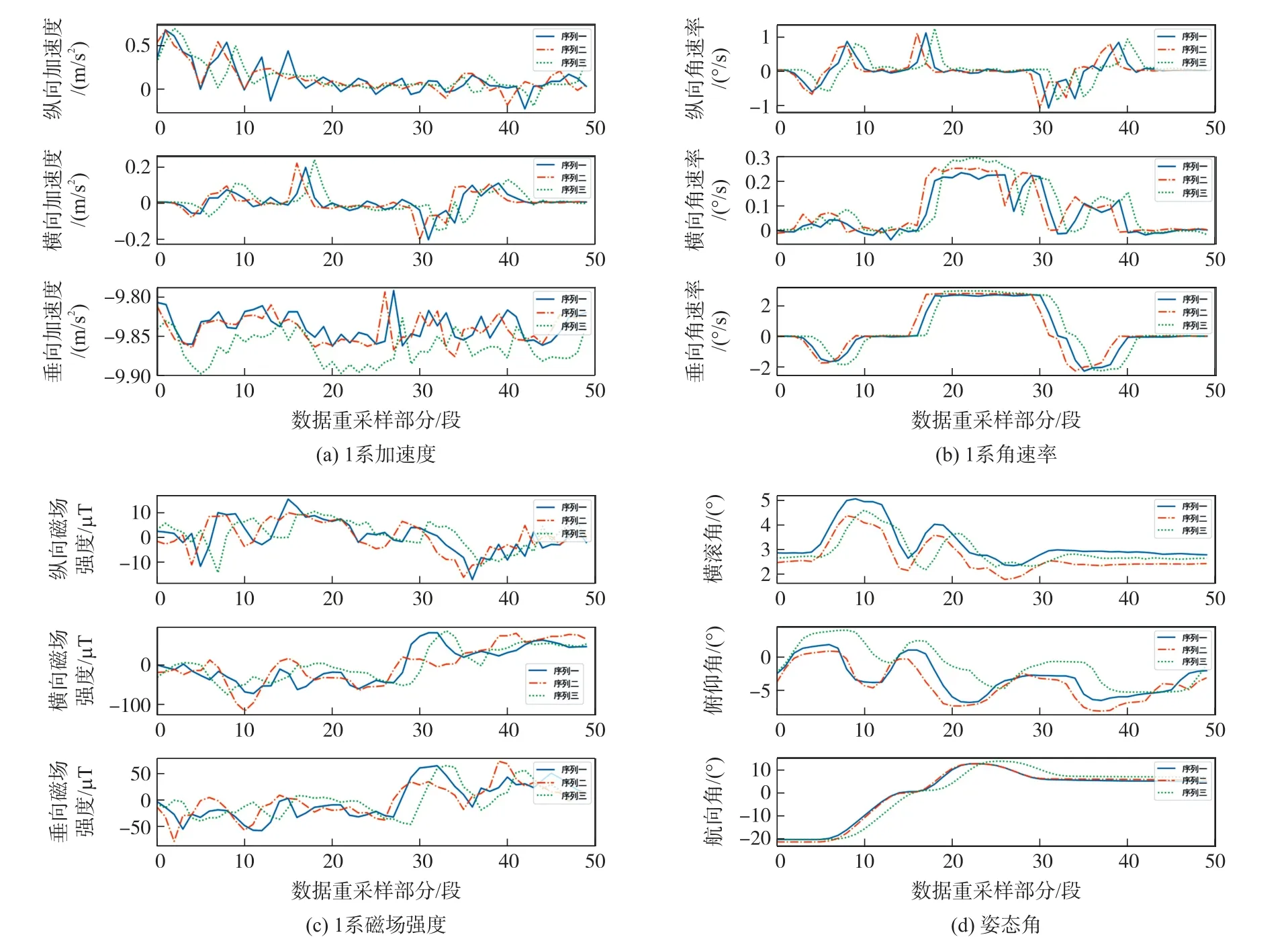
图3 曲线路段的数据特征可视化
从图2 可以看出,地铁行驶在直线路段时,加速度和角速率都有较好的重复性,但是波动不显著。相比于加速度和角速率,磁场强度的起伏波动表现更好,其中垂向磁场强度显然优于平面磁场强度。相对航向在直线路段基本在0 附近波动,横滚角和俯仰角均呈现出不错的变化波动以及良好的重复性,更适合作为定位特征。
从图3 可以看出,地铁行驶在曲线路段时,角速率、磁场强度和姿态角都具有明显的波动和良好的重复性,都适合作为数据特征。但加速度与平面磁场强度会存在明显的噪声情况,会造成匹配精度的下降。
综合直线路段与曲线路段的数据表现来看,本文最终确定将横向角速率、垂向磁场强度、横滚角和俯仰角作为匹配定位的数据特征。
1.2 数据库构建
完成特征选择步骤后,则进行特征数据库的构建。对于同一路段,可以选择多次重复采集后的任意一组数据生成数据库中的特征。特征计算完成后,以前一站与后一站的名称作为这一路段的位置标签,并将数据特征和位置标签存储。同时,地铁线路中相同两站之间的往返道路彼此独立,因此需要对两站之间往返路段根据方向分别生成数据特征和位置标签。某一路段特征数据库的数据格式为:
式中:Sm为地铁站的ID,m为地铁站的序号,k为单个站点特征的采样数量。
1.3 匹配定位
考虑到相同路线的地铁驾驶员存在交接班现象以及不同驾驶员的习惯差异,本文采用动态时间规整(DTW)算法[13-14]进行匹配定位。DTW 能通过局部压缩和拉伸序列,达到最优匹配。DTW 的基本思路如下:计算待匹序列Stest和数据库中参考序列Sref的距离矩阵D:
式中:D是一个n×n的矩阵。寻找一条从此矩阵左上角到右下角的元素和最小的路径,并将最小路径上的元素和作为两个序列的相似度评判指标。其中最佳路径搜索过程可描述为:从两个序列的最末尾格点(i,j)向前搜索,到达格点(i,j)的前一个格点只能是(i-1,j),(i,j-1),(i-1,j-1),三个距离中最小值将选为前一个格点,此时最佳路径的累计距离为:
计算数据库中所有参考序列与测试序列的相似距离,最小相似距离对应的路段即为匹配结果。考虑到单一特征存在明显的误匹配现象,本文将多种特征的相似度指标进行加权求和。将每种特征中所有距离矩阵的最小相似距离Dmin,i与次小相似距离Dsub,i的比值作为该特征的权重:
式中:wi为某一特征的权重,本文采用横向角速率、垂向磁场强度、横滚角和俯仰角。据各特征的权重和相似度指标,计算得到新的相似度度量指标:
最后,综合多种特征的相似度指标最小值对应的路段即为待匹配序列的路段。
2 实验与结果
2.1 实验描述
数据采集路段为武汉城市轨道交通1 号线、2 号线、7 号线和8 号线的部分路段,包括曲线路段和直线路段。4 名数据采集人员,使用6 个型号的智能手机(包括HUAWEI nove 4,HUAWEI P30,HUAWEI mate 20,Xiaomi 10,Redmi K20 Pro,Redmi K40)。每次采集数据时,尽量保证采集人员在不同车厢,以应对不同车厢带来的影响。数据采集过程中,参与者将智能手机粘贴在地铁车厢的内壁上,手机中垂线与地铁铅垂线基本平行,数据采样率为50 Hz。图4 所示为智能手机的安装方式。

图4 智能手机的安装方式
数据采集完成后,将数据分为数据库数据和测试数据,具体如表1 所示。

表1 实验数据说明
2.2 匹配精度
地铁车站级匹配定位结果如表2 所示,准确率达到了98.4%。从表中可以看到,基于本文选择的特征进行匹配定位均可达到较高的准确率,且将各特征组合后,匹配准确率会进一步提高。同时可以看出,直线路段的匹配准确率要略低于曲线路段,这也反映出直线路段的特征信息少于曲线路段。

表2 数据匹配结果
同时本文也将相关性算法用于匹配定位,测试准确率为87.5%,显然低于DTW 算法的匹配准确率。这是因为地铁的平均速度相同,但是局部速度会有所差异,从而导致特征序列局部存在一定的时间错位。DTW 算法则是通过局部拉伸和压缩特征序列,实现两个序列的最优匹配,能够很好地适应特征序列局部错位的现象[14]。然而,相关性算法对这类特征序列的兼容性较差,因此DTW 算法能够达到更好的匹配结果。
2.3 匹配精度的影响因素分析
本部分主要对地铁车站级匹配定位精度的影响因素进行分析。将地铁在行驶过程中的姿态角、投影后的加速度、角速率、去平均的磁场强度数据均用于匹配定位,得到的匹配结果如表3 所示。从表中可以看出,直线路段的匹配结果要整体差于曲线路段,横向角速率、垂向磁场强度、横滚角和俯仰角的匹配准确率显然要优于其他特征。

表3 不同数据类型进行匹配定位的结果
重采样频率会造成数据量和特征表现等因素变化。其中,数据量的大小会影响匹配计算效率,特征表现反映特征序列定位能力。因此,需要分析不同重采样频率对匹配结果的影响,选择将重采样个数为10~100 的横向角速率、垂向磁场强度、横滚角和俯仰角进行匹配定位,得到的匹配结果如图5 所示。

图5 不同重采样个数对匹配准确率的影响
从图中可以看出,低频率数据会导致特征的定位能力下降,匹配准确率较低。随着数据频率的升高,匹配准确率逐步上升,在数据重采样个数为50时达到最大值。之后数据采样率继续上升,匹配准确率基本没有变化。同时,随着数据采样率的提高,数据量越来越多,数据匹配速率越来越慢。因此,本文将数据重采样个数设置为50,从而达到精度与效率的平衡。
2.4 与其他方法的对比
图6 所示为DTW 算法与其他车站级定位方法的准确率对比,对照方案包括SubwayPS 方法[6]、SubTrack 方法[7]、单一气压计方法[8]和惯性传感器与GSM 结合方法[12]。从图中可以看出,采用惯性传感器与磁力计组合特征,并使用DTW 方法实现地铁车站级匹配定位,精度显然优于其他方法,这充分体现了本文提出的方法的优越性。

图6 地铁车站级定位的方法准确率对比
3 总结
基于智能手机的内置传感器,本文实现了准确的地铁车站级定位。通过分析不同路线条件下(例如直线段和曲线段)数据特征的表现,确定了适用于地铁车站级匹配定位的四种特征(包括横向角速度,垂向磁场强度,横滚角,俯仰角)。接着,本文将设计的四种特征组合使用,并采用DTW 算法进行匹配,达到了地铁车站级定位98.413%的匹配准确率。本文提出的方法优于现有其他的基于智能手机的地铁车站级定位方法,可为大众用户提供一种可靠的地铁到站预报服务,能够有效改善大众用户乘坐地铁的出行体验。
本文设计的定位算法仍属于探索阶段,现阶段定位需要用户在乘坐地铁时手机按照一定的要求放置才能得到地铁在行进过程中准确的姿态角信息,而地铁隧道的磁场特征不需要考虑手机的放置要求,未来考虑实用性,将会以磁场为主要特征进行匹配定位。
