基于故障分辨能力的火箭发动机测量参数选择方法
2024-01-20张效溥任枫徐鹏里李志敏宿彩虹
张效溥,任枫,徐鹏里,李志敏,宿彩虹
上海宇航系统工程研究所,上海 201109
液体火箭发动机是火箭动力系统的关键组成部分,其工作状态直接关系到发射任务的成败。目前,随着载人登月、深空探测等攻关项目的开展,为满足“一重故障正常工作,两重故障保证安全”的功能要求,需协同开发故障监测、健康管理、飞行重构等功能,这对测控系统对故障的分辨能力和传感器的可靠性提出了巨大的挑战。例如,对某现役飞行器发动机开展故障分析时,发现故障特征可能由5 种不同的失效形式造成,无法定位到具体单机产品,严重影响故障排查进展;在某现役型号火箭飞行重构策略的制定中,也出现了在当前测量方案下末子级发动机大量故障特征相似程度极高、难以进行诊断的问题。依据研制经验,传感器布置的数量、安装位置、安装形式对遥测数据的获取和发动机的可靠性都有着直接的影响。若传感器布置太多,可能造成测量特征的冗余和浪费,加大了总装总测的难度,且降低了发动机的可靠性。以往飞行试验就曾出现因在高压容腔安装测压管接头造成的角焊缝撕裂的故障模式;相反,盲目地减少传感器数量,会使大量故障的特征趋于一致,造成责任界面的不明确、“举一反三”工作难开展。如何选取发动机的测量参数并布置传感器,使发动机保证较高可靠性的同时分辨更多种类的性能故障,是一个关系到发动机设计和使用的关键问题。
测量特征的选择是一个典型的最优化问题,通过不断调整特征子集或者测点的空间属性改善关心的测量性能。Maul 等[1]以飞机系统为例,提出了传感器布置的4 类评价指标:性能的可观测性、故障的检测能力、可靠性、费用。目前国内外相关研究大多围绕这4 类指标展开。郑帅[2]、Jung[3]等对以不可测油量和姿态误差为优化目标,对飞机油箱内的液位传感器的安装位置和角度开展了优化;Pereira 等[4]将7 种性能指标作为优化目标,对直升机叶片测量方案开展优化;Omata 等[5]采用主成分分析对火箭发动机不同位置泄漏故障进行降维,并采用贪婪策略搜索更容易检测出泄漏故障的传感器排布;徐敏强等[6]采用符号有向图完成火箭发动机故障专家知识的推断,并提出一种提高故障检测覆盖率的方法;杨冬健等[7]梳理了航空液压系统故障因果矩阵,并提出了一种提高故障隔离率、降低虚警率的传感器选择方法;张笑华[8]、Li[9]、Liu[10]等将传感器优化技术应用于结构健康监测,通过优化加速度传感器空间位置,加强对结构损伤的测量灵敏度;Kong 等[11]基于专家知识,采用离散粒子群算法对液压控制系统的传感器排布开展优化,提高故障检测的实时性;Li 和Der Kiureghian[12]采用最大期望效用理论和贝叶斯线性模型来进行鲁棒传感器的布置,以实现运行模态的辨识;Li等[13]将航空发动机进气道传感器优化任务转化为同时含1、2 范数惩罚项的最优化问题,并提出了一种收敛性较好的求解方法。此外,部分研究人员尝试将各领域的传感器优化问题形成规范化的优化算法框架。例如,Błachowski 等[14]提出一种高效的动载荷下大型建筑传感器布置优化框架;Taravatrooy 等[15]在考虑了不确定性的前提下,提出了改善供水管网系统泄漏检测能力的压力传感器优化布置算法框架;Morlier 等[16]基于Kriging 方法建立传感器位置信息与MAC 系数间的代理模型,形成传感器布置高效全局优化方案。
从上述调研可以看出,当前应用于液压、气动系统传感器优化布置主要基于专家知识或者信息论,但是这2 类方法对火箭发动机传感器优化均存在一定的局限性。基于专家知识的方法更多地关注故障的“覆盖性”,即“是否能测到”而不是“是否能分清”,没有形成量化的故障特征库,对故障间的距离度量考虑不足,难以解决“不同类型故障相似度较高”这一困扰;同时,基于专家知识的传感器优化方法非常依赖于领域知识的正确性,而火箭发动机作为复杂闭环系统,故障种类众多,难以根据工程经验开展故障分析;基于信息论的传感器优化方法一般采用相关系数、冗余指标、互信息系数等作为优化目标。这些指标在一定程度上可以反映出传感器布置方案的优劣,但是不能直接表征可区分故障的数量和类别。同时,现有方法鲜有考虑制造公差、测量噪声下的鲁棒性和传感器安装对系统的可靠性。
基于上述现状,提出了一种基于模型的、面向液体火箭发动机的测点组合对故障分类能力的评估方法以及优化方法。为克服火箭发动机故障专家知识提取较为困难的问题,基于发动机静态性能仿真模型构建发动机故障特征库;采用凝聚层次聚类算法评估任一测点排布能识别的故障种类,并结合测点组合的抗噪性能指标、测点组合的风险量化指标共同构成测点综合评价指标;采用二进制多目标粒子群算法对测点组合进行优化,获得测点组合的Pareto 解集,并挑选优化后的测点组合。该方法可以较好地平衡系统可靠性、故障的可分性和故障识别的鲁棒性,对其他复杂、闭环的动力系统的测点选取亦有良好的应用前景。
1 发动机静态特性建模及故障库的建立
1.1 液体火箭发动机数学模型
为建立液体火箭发动机的静态模型,应先确定发动机各组件的静态特性方程,再代入系统约束方程进行求解。从发动机结构来看,发动机由管路、阀门、燃烧室、涡轮等组件组成;从发动机系统设计来看,主要由主系统和副系统构成,且满足稳态压力、流量和功率3 大方程。下面介绍各关键单机数学模型[17]。
1.1.1 涡轮泵模型
涡轮泵是泵压式发动机的核心组件之一,其作用是将燃气的焓转化为机械功,并对推进剂进行增压,使其流入推力室。涡轮泵由1 个轴流式气动涡轮和2 个离心式推进剂泵组成。其中,涡轮功率、涡轮效率分别为
式中:Wt为涡轮功率;ηt为涡轮效率;γ为气体绝热系数;Rg为燃气的气体常数;T*为燃气总温;pin、pout分别为涡轮上、下游压力;qf为燃气流量;n为转速;at、bt、ct均为涡轮效率常数。
离心泵的功率、扬程与效率特性分别为
式中:Wp、Δpb、ηb分别为泵的功率、扬程和效率;qv为推进剂体积流量;n0为额定转速;ah、bh、ch均为泵扬程的涡轮泵特性常数;ap、bp、cp均为泵效率常数。
1.1.2 燃烧组件模型
燃烧组件的作用是将双组元推进剂的化学能转化为燃气的内能,形成较高的室压、室温,再经过喷嘴、喷管元件形成流量。燃烧组件的室温、室压和流量的关系为
式中:c*为燃气特征速度;pc、qc、At、ηc分别为燃烧组件的室压、流量、喉径和燃烧效率;燃气组分和温度一般采用等焓约束下的最小自由能法求解,其数学模型为
其中:ni、hi和si为第i种燃烧产物的分子量、比焓和比熵;Li,j、Ltot,j分别为第i种燃气中第j种元素原子的数量和第j种元素原子总数;T为燃气温度;Mi、mtot分别为第i种组分的分子量和燃烧室内物质总质量;Hin、Hout分别为燃烧前后物质的总焓。该问题是含等式约束的最优化问题,一般采用Lagrange 乘子法求解。本文为减少计算时间,事先在一定混合比、室压设计范围内采样和计算,采用响应面法求解燃气组分和温度对混合比、室压的代理模型,再代入系统模型求解。
对于后端连接拉瓦尔喷管的燃烧组件,需补充推力和比冲的数学方程,其表达式为
式中:CFv是喷管的推力系数;I为喷管的比冲;F为喷管产生的推力。
1.1.3 节流元件模型
液体火箭发动机节流元件有节流圈、音速喷嘴和汽蚀管3 种。其数学特性和功能存在一定的差异。节流圈起到调节推进剂流量的作用,其流量特性为
式中:Qlz为液路节流圈的流量;Cd为节流系数;Ao为节流孔面积;ρ为推进剂密度。汽蚀管与普通节流圈相比,具有隔绝下游压力波动的功能。当压比低于发生气蚀的临界压比时,汽蚀管退化为节流圈。其流量特性为
式中:Qqs为气蚀管的流量;psv为推进剂的饱和蒸气压;πcri为发生汽蚀的临界压比。
燃气喷嘴多用于发生器后,调节涡轮燃气流量。其流量特性与可压流体节流孔类似,可表示为
式中:Qps为音速喷嘴流量;Z为气体压缩因子;ϕ为喷嘴的流量系数。
1.1.4 发动机系统静态模型
按照发动机结构,形成发动机热力学参数传递的拓扑图,构建系统级平衡方程,即:任意1 个节点处流量之和为0,任意1 条回路上的压力变化之和为0,任意1 组同轴的转子功率之和为0。将系统平衡方程联立上述单机静态模型进行求解即可得到发动机静态参数。本文采用变步长的Newton-Raphson 方法求解非线性方程组。
1.2 基于模型的故障特征库的构建
发动机的故障模式按故障类型分类有泄漏、堵塞、工作压力异常、转子效率下降等;按故障发生的位置分为主管路故障、副管路故障、涡轮泵故障、阀门故障等。各类故障的定义如表(1)所示。
为全面评估不同故障在各严重程度下的发动机性能变化,每种故障系数均在相应的取值范围内均匀取值30 个,共形成L种故障模式,并计算每种故障模式在这些故障系数下的故障特征向量。故障特征向量定义为注入故障前后,发动机m种稳态性能的变化率经过规范化后的向量,其表达式为
式中:yl、yl'为加入第l种故障前、后的发动机性能参数;xl为第l种故障造成的性能参数变化率;xl,norm为归一化后的性能参数变化率(1≤l≤L)。将所有故障代入仿真模型进行计算,得到行数为L、列数为m的故障特征矩阵Ωall,其定义为
式中:xi,j,norm矩阵第i行、第j列的元素代表第i类故障发生时第j种发动机性能的变化率。实际发动机产品不可能全部测量到所有性能参数。本文用1 个m维的向量s=[s1,s2,…,sm]来表示发动机测量参数的选取情况,其中si取值为0 或1。当si为1 时,代表第i种发动机性能被选为测量参数;当si为0 时,代表第i种特征未被选为测量参数。则任一测量方案下的故障特征矩阵Ωs为
式中:λs为发动机测点选择情况为s时对应的故障筛选矩阵。不难看出,该矩阵是Ωall抽取若干列向量组成的新矩阵。
2 考虑故障可分性的测点组合优化方法
根据宇航任务的特点,发动机测量参数选择应满足以下条件:①尽可能区分更多故障;② 传感器便于安装,且对发动机系统引入的风险尽可能小,可靠性尽可能高;③根据以往飞行结果,发动机产品性能与额定值相比存在一定的随机误差,因此测量数据应具有较好的鲁棒性。基于表1,对任意排布方案s,选取凝聚层次聚类的最优化划分数K作为故障可分性的指标,选取噪声偏移率e作为鲁棒性指标,并基于FMEA 计算测点组合的风险指数R作为可靠性指标,最终形成性能向量[-K(s),e(s),R(s)]作为适应度函数,采用多目标粒子群优化算法对测点组合进行寻优。

表1 故障模式及定义方式Table 1 Mathematical definition of faults
2.1 故障可分性指标的计算
聚类算法可以较好地表征向量的空间聚集程度,本文基于凝聚层次聚类算法计算故障可分性指标。凝聚的层次聚类是一种自下而上的聚类策略,即把每个单独的样本都看作1 个聚类簇,通过不断合并距离最低、相似度最高的样本来构成新的簇,然后将合并得到的簇看作1 个新的样本,再次进行合并。如此反复迭代,直至所有样本合并为1 类[18]。算法流程为
步骤1设某测点组合s测量的故障特征矩阵为ΩS。首先将每个行向量都看作1 个单独的簇Ci,共L组,即Ci={xi}。
步骤2计算每2 个簇之间的距离,形成Lp×Lp的距离矩阵D。其中,dij代表第i个分类簇和第j个分类簇的距离;Lp为第p次合并后的总簇数。本文选用平均距离法[19]定义簇与簇之间的距离,其定义为
式中:xa、xb为不同簇内的向量。
步骤3将距离最近的2 个簇合并成1 个簇,并删除已合并的2 个簇,如式(21)所示。合并完成后分类簇总数量减1。
式中:Cnew为合并的簇;Cp、Cq为每步中距离最近的2 个簇。
步骤4重复步骤2~步骤3,直到所有样本合并成1 个簇。
步骤5根据聚类效果度量指标确定最优划分数K。聚类效果度量指标主要基于簇的紧凑度与分离度,即簇内样本越紧凑、不同簇之间相似度越低,聚类效果越好,越能真实地体现数据的聚集情况。常见评价指标的有轮廓系数、Davies-Bouldin 指数、Dunn 指数等[20-21]。本文选取Davies-Bouldin 指数(DBI)作为度量指标,其定义如式(22)~式(23)所示。
式中:Ip为第p次合并后的DBI。代表第i个和第j个分类簇内全部样本两两之间的平均距离,其表达式为
式中:dsingle,i,j为簇内第i、第j个向量之间的距离;LCi为簇Ci中的向量数量。
图1 为选取某发动机现有测点对故障表进行聚类得到的聚类指标变化值。可以看出,簇数量为9 时,DBI为最低值,此时最小簇间距离第1 次明显增大,而最大簇内平均距离则变化不大,这意味着最后1 对间距较低的簇已完成合并;而当簇数量减小至8 时,最大簇内平均距离大幅升高,而最小簇间距离变化不大,说明分类数已经过低,错误地将2 个距离较远的簇合并在一起。综上所述,DBI 最小时,意味着聚类进行到了1 个“簇内相似度最高,簇间区分度最高”的最佳状态,可以较好地表征任意测量参数组合下可区分的故障的数量。

图1 3 项聚类度量指标与簇划分数的关系Fig.1 Relationship between three clustering metrics and clustering number
2.2 鲁棒性指标的计算
实际产品由于制造公差、环境因素、测试干扰等原因,遥测结果与仿真存在偏差,而DBI 只能衡量紧凑度和分离度的相对大小。如果传感器排布方案对噪声敏感度过高,会使最优划分数在实际工作环境中相对仿真模型得出的理论值发生偏移,导致评价依据失效。
噪声对凝聚层次聚类的作用机理比较复杂,因此采用蒙特卡洛方法评估任意测量特征组合的抗噪性能。定义噪声偏移率e为N次随机噪声试验中,最优划分数发生变化的次数占总试验次数的比率,其表达式为
式中:N为试验次数;Ki为第i次试验中,加入噪声后的最优划分数;下标ζ代表加入随机噪声的均方根值。图2 为2 组测点方案的鲁棒性对比,其中RMS 代表噪声的均方根值。图2(a)表示2 组测点组合在不同强度随机噪声下进行100 次试验后的最优划分数的偏移率。可以看出,组合2 的偏移率明显低于组合1;从图2(b)、图2(c)可以看出,加入噪声后,2 个组合的DBI 变化趋势均有变化,但组合2 的DBI 曲线形状基本保持不变,而组合1 的DBI 曲线在最小值附近发生了剧烈的变化。该结果说明,即使2 组排布对应的最优划分数相近,但是其对噪声的灵敏度可能有非常显著的差别,这也表明了采用鲁棒性指标的正确性和必要性。

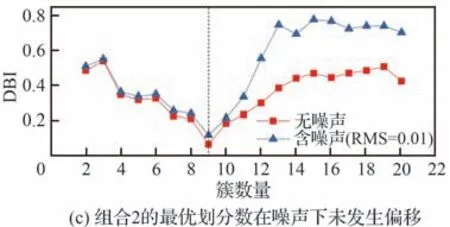
图2 2 组测点方案的鲁棒性对比Fig.2 Robustness comparison of two measuring parameters schemes
综上所述,结合多台发动机的性能偏差先验信息,本文选取100 次0.01 均方根噪声下的噪声偏移率e0.01作为评价指标。
2.3 可靠性指标的计算
飞行器对可靠性和安全性有着较高的需求,传感器的布置应该尽可能考虑其风险系数。因此,需对发动机测量系统开展失效模式影响分析(FMEA),通过基于知识的方法确定传感器组合的风险程度。本文采取风险指数矩阵作为风险的量化指标,其可以作为故障严酷程度和发生概率的综合评价指标。风险指数矩阵的定义如表2所示。
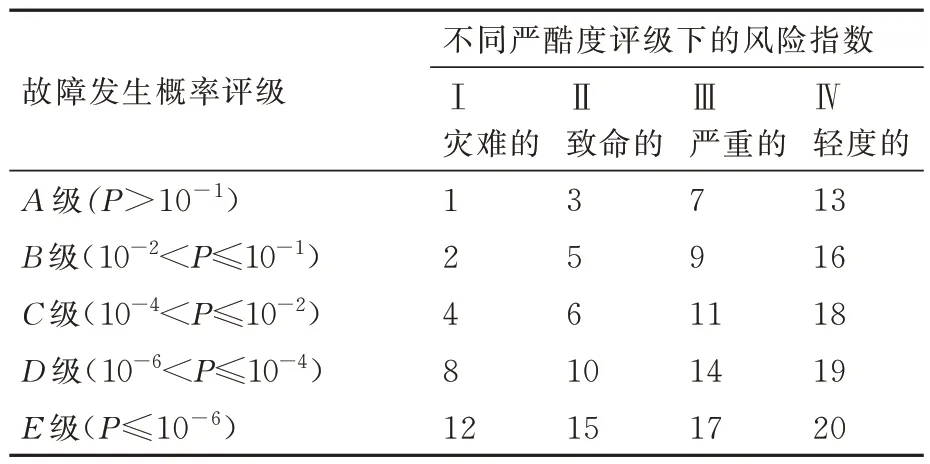
表2 航天产品风险指数矩阵Table 2 Risk index matrix of aerospace product

表3 发动机传感器FMEA 表Table 3 FMEA of liquid rocket engine sensors
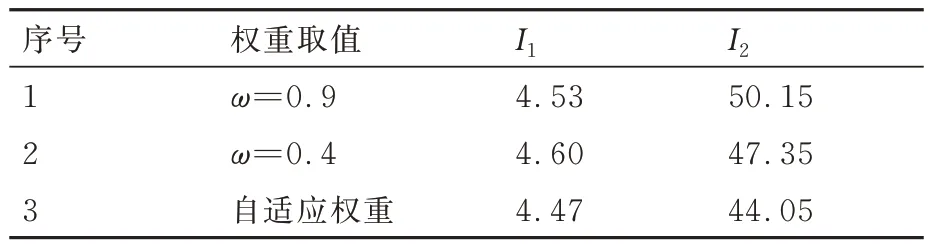
表4 不同权重参数的寻优性能对比Table 4 Comparison of optimization performance between different weights
以发动机系统为初始约定层次,对测量参数对应的传感器的进行失效模式影响分析,确定故障模式、3 层次影响及风险量化指标,其形式如表(3)所示。统计n种传感器风险指数,并形成n×1 的传感器风险指数向量Rn×1。
对于1 项发动机性能参数,其可能由单个传感器直接测量,也可能需要多个传感器经过特定的解算才能获得。定义1 个由0、1 组成的m×n的传感器测量矩阵θm×n,其第i行、第j列元素代表第i种发动机性能参数是否需要安装第j类传感器。考虑到泵压式发动机内组件无冗余备份,均为单点故障,因此可用单机级风险指数之和作为该方案的总风险量化指标,其表达式为
式中:Rtot为总风险量化指标;θ为传感器测量矩阵;R为传感器风险指数向量。
2.4 基于多目标二进制粒子群的测点组合优化设计
由上述分析可知,测点组合的优化目标为[-K(s),e(s),R(s)]。同时,为防止产生过多的Pareto 解,提高分析最优解的效率,对3 项目标函数增加了约束。综上,该优化问题可表示为
式中:Kmin、emax和Rmax分别优化过程中需满足的最小划分数、最大偏移率和最大风险系数。为采用外点罚函数法将含约束问题转换为无约束问题:
其中:v(s)为惩罚函数,其形式为
其中:G1~G3为每项测量性能指标的惩罚函数;κ1~κ3为惩罚函数。该问题属于典型的组合优化问题,求解难度较大,采用一般的方法难以得到准确的结果。本文采用改进的二进制多目标粒子群算法[22]优化特征子集,根据实际需求人工筛选Pareto 前沿中的非支配解,确定最终的测量参数组合。其步骤如下:
步骤1初始化粒子群中的各粒子参数。随机生成各粒子的位置S={s1,s2,…,sm}和速度V={v1,v2,…,vm}。
步骤2对各粒子按第3 步所述方法进行适应度计算,按适应度向量的支配关系确定个体最优位置Pbest及全局最优位置Gbest。
步骤3按式(30)和式(31)更新每个粒子的速度和位置。
式中:vi,k、xi,k为第i个粒子在第k次迭代中的速度向量和位置向量;c1、c2为认知系数;γ1、γ2、r为[0,1]之间的随机数;ω为惯性权重。为进一步降低粒子群进入局部最优解的风险,引入Sigmoid 函数[23-24]对权重进行自适应调整,其数学表达式为
其中:A、B为调节参数;ωmax、ωmin分别为惯性权重的最大、最小值;l为迭代次数;A、B为常数。
步骤4针对每个粒子,若更新后的粒子支配目前的个体最优解Pbest,则更新Pbest;若与目前个体最优解互不支配,则按50%概率更新Pbest。对Gbest的更新策略与Pbest相同。
步骤5将新的Gbest加入外部精英档案并维护,去除档案内重复的粒子,并对支配关系进行排序,删除全部被支配的粒子,确保档案内的粒子全部处于Pareto 前沿。
步骤6若迭代次数未达到200 次,重复步骤3~步骤5,迭代次数加1;否则,停止迭代,从外部档案中取出全部解,转化成测点排布方案,并根据设计需求,人工筛选测量方案。
综上所述,基于多目标二进制粒子群算法的测点组合优化方法流程图如图3 所示。
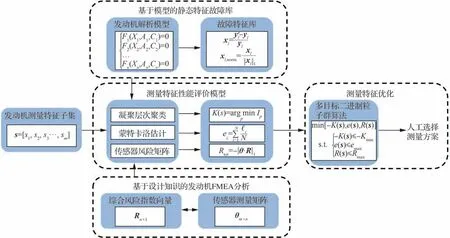
图3 测量特征优化流程图Fig.3 Flow chart of measuring parameters optimization
3 算例分析
某现役、开式循环火箭发动机的测量参数为:燃料泵后压力、氧化剂泵后压力、涡轮转速和氧化剂喷前压力。该发动机的拓扑结构如图4所示。
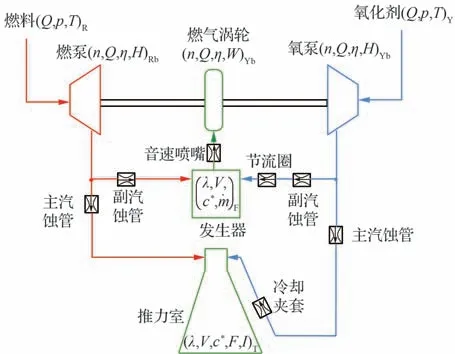
图4 某现役火箭发动机系统图Fig.4 System diagram of rocket engine on active service
根据第1 节所述方法对发动机静态特性建模并计算故障特征矩阵,获得了L=510 种故障下m=37 项发动机性能参数的变化情况。采用2.1~2.3 节所述方法计算现有测点组合下性能指标,结果表明该组测点最优划分数为9,即可以分辨出9 种故障,噪声偏移率为0。为更好地表征故障特征在空间中的分布,采用主成分分析(PCA)将故障特征降至三维。降维后的故障库定义为
式中:变换矩阵Λ为归一化的故障特征协方差矩阵Φ最大的3 个特征值对应的特征向量构成的矩阵。Φ的定义为
其中:μs为故障特征矩阵列向量的均值排列形成的行向量。降维后的故障空间特征如图5 所示。可以看出,不同故障中心间隔距离较大,说明该排布的抗噪能力较强;但5 号故障中心聚集了271 种故障,且均与副系统相关。其原因是2 个泵后压力测量值与涡轮转速相关性很高,相当于引入了冗余测点,测点的鲁棒性有所提高,但无法区分副系统故障。

图5 原测点布置方案下的故障特征主成分图Fig.5 Principal components of fault characteristics under original measuring parameters scheme
图6 为故障库有效性的验证过程。某次飞行故障中采集到的4 项测量参数的时域曲线如图6(a)所示。取故障前、后的稳态值,计算变化率并做规范化处理,计算故障特征到9 个故障分类簇中心的Euclid 距离,如图6(b)所示;找到距离最近的1 个,即为最可能发生的故障类型。从结果可以看出,该故障被识别为副系统性能下降故障;通过遥测录像等多媒体记录进一步排查,确认为涡轮泵结构破坏,为副系统性能下降故障的1 个子集。以上分析验证了故障特征矩阵的准确性。
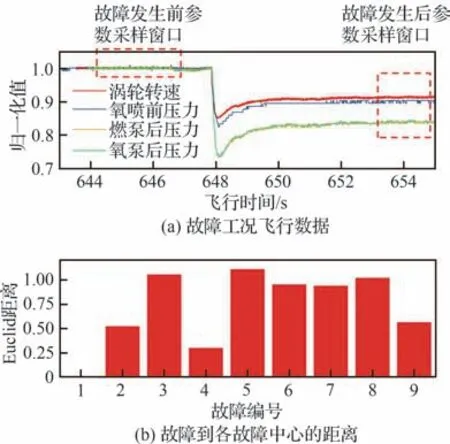
图6 发动机静态故障特征库的验证Fig.6 Verification of engine static fault feature list
采用第2 节中所述方法对传感器排布进行优化,其中,Kmin=8,Emax=30%,Rmax=0.6,粒子数量30,最大迭代数量100,ωmax=0.9,ωmin=0.4,A=13,B=0.15。图7 为算法收敛过程,可以看到在44 次迭代之后,非支配解数量趋于稳定。为验证自适应权重方法的有效性,选取30 组随机初始粒子位置,对第1 个最优非支配解出现的平均迭代次数I1和获得全部最优非支配解的平均迭代次数I2进行计算。其中,I1表征了算法寻优的效率,I2则反映出算法的全局寻优性能。计算结果如表(4)所示。结果表明,自适应权重的I1整体上与ω=0.9 和ω=0.4 的非自适应权重方法持平,有小幅度的降低;自适应权重的I2则明显优于ω=0.9 的情形,略优于ω=0.4 的情形。上述结果验证了自适应权重方法兼具搜索效率和全局寻优性能。

图7 多目标粒子群算法迭代过程Fig.7 Iteration process of MOBPSO
优化算法收敛后共获得8 组非支配解。8 组解非支配解中,最优划分数在9~13,偏移率均在20%以内。8 组非支配解的空间分布情况和非支配解各性能参数分布情况如图8、图9 所示。

图8 非支配解空间分布情况Fig.8 Spatial distribution of non-dominated solutions
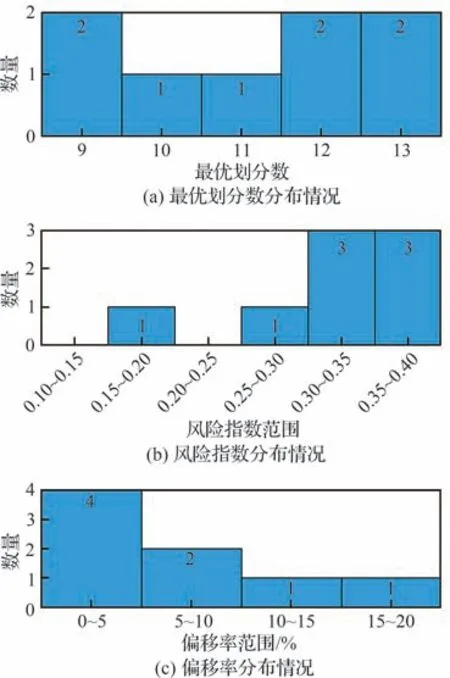
图9 非支配解各性能参数分布情况Fig.9 Distribution of performance parameters of nondominated solution
选取最优划分数13 的2 组解中的1 组进行对比分析,对应的测点组合为:副系统混合比、主系统混合比、转速和氧喷前压力。该选取采用主成分分析对故障特征进行降维,3 项主成分的分布图如图10 所示。可以看出,对测点排布进行优化后,可分辨的故障从9 种增加至13 种;各故障中心两两之间距离较远,偏移率约为3.1%,与原排布方案相当。其中,副系统故障的分辨能力明显提升,副系统故障中心(7 号)虽仍存在一定程度的聚集,但氧、燃副路堵塞和氧副路泄漏这3 种重要故障已经从中剥离出来。上述结果表明了优化方法的有效性。
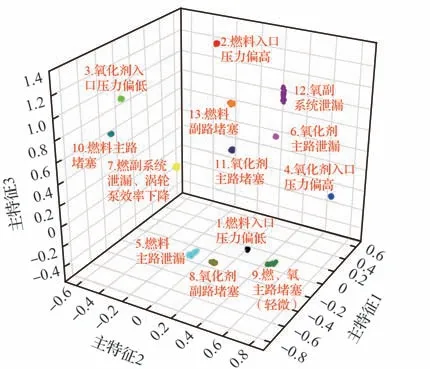
图10 优化布置方案下的故障特征主成分图Fig.10 Principal components of fault characteristics under measuring parameters scheme
进一步观察优化过程,发现包含副系统混合比的测量方案的可分辨故障数普遍高于不包含副系统混合比的测量方案。因此采用蒙特卡洛方法,随机选择200 组包含和不包含副系统混合比参数的4 测点方案并统计其3 项指标,结果如图11 所示。可以看出,包含副系统混合比的测量方案的最优划分数偏高,偏移率变化不大,风险指数略有上升。图中红色部分代表包含“副系统混合比”的测量方案;蓝色部分代表代表不包含“副系统混合比”的测量方案。
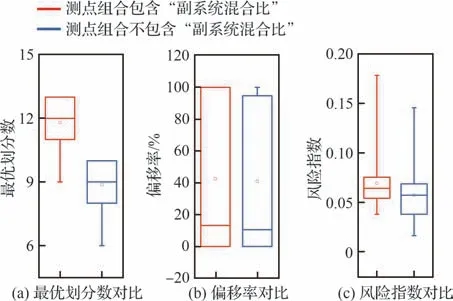
图11 副系统混合比对故障分辨能力的影响Fig.11 Influence of mixing ratio of subsystems on fault recognition
从发动机机理上可以解释上述现象产生的原因。作为副系统氧、燃流量的比值,副系统混合比直接表征了副系统的工作状态;另外,从机理上来看,副系统混合比直接决定了燃气发生器内高温气体的组分、温度和压力,进而显著影响涡轮入口燃气焓流量和涡轮泵输入功率;而在发动机主系统中,涡轮泵的扬程一旦发生改变,压力平衡方程的解也会发生变化,从而导致发动机静态参数相较额定工况发生偏移。由于副系统管径小、压力高,目前副系统流量一般采用软测量方法。由此可见,持续开展高精度的副系统流量测量硬件的研制和测量方法的研究是改善静态故障的辨识率的重要方向。
综上所述,所提方法能够提高测量系统对故障的分辨能力,且兼具良好的鲁棒性和系统可靠性。后续工程化过程中,主要还需要考虑硬件、软件两方面。对于硬件,尤其是参与闭环控制的传感器,一旦发生故障可能导致发动机虚警、执行错误动作甚至触发备保关机,属于Ⅱ类甚至Ⅰ类单点故障。因此,应采取冗余措施,例如多传感器冗余表决或根据FMEA 在控制器模块制定IF-THEN 形式的传感器失效后处置策略;此外,对传感器测量值采取合适的滤波方法,也是在线故障识别的重点、难点之一。对于软件和算法层面,主要需要考虑软测量下的误差量化。对于压力、转速等信息,可以直接采用传感器测量;而本文所提提到的“副系统混合比”指标,则需要副系统管路某节流元件两端压力和水试阻力系数实时解算流量,再计算混合比。水试阻力系数测试不合理或未覆盖飞行中的压差将会显著影响故障诊断的可靠性。因此,应开展冷态流动试验,对副系统管路和节流元件的流阻特性进行精确的标定,且工况覆盖飞行中可能出现的温度、压力。目前,火箭发动机在线故障判别方法已在现役常温运载火箭实现了初步应用。
4 结论
1)基于火箭发动机静态特性的数学模型,通过输入模拟故障获得发动机静态特性故障库。依托基于模型的故障特征库,考虑故障分辨率、测量的鲁棒性和系统可靠性,提出了液体火箭发动机测量特征子集评价指标的计算方法以及基于改进的多目标二进制粒子群算法的传感器测点组合优化方法。
2)将上述方法应用于某现役火箭发动机的测量特征优化。优化后的测点布置方案,其可分辨的故障数量从9 种提升至13 种,鲁棒性变化较小,风险指数有较小提升;进一步探究了“副系统混合比”这一测量参数在泵压式发动机故障分辨中的重要作用,并从机理层面进行解释。本文提出的方法对其他复杂、闭环动力系统测量特征的选择具有较好的应用价值。
