基于热响应特性的高速飞行器轨迹设计与制导
2024-01-20许昱贺峥光薛鹏飞陈万春陈峰
许昱,贺峥光,薛鹏飞,陈万春,陈峰
1.空间物理重点实验室,北京 100076
2.中国运载火箭技术研究院,北京 100076
3.北京航空航天大学 宇航学院,北京 100191
高速飞行器具备飞行速度快、机动能力强、投送距离远等诸多优势,已成为航空航天领域的战略制高点之一[1]。随着对飞行速度的追求不断提升,高速飞行器面临的热防护问题愈加复杂和严峻[2],加强各分系统耦合度并开展多学科优化设计是解决该问题的主要方式。
在传统轨迹与制导设计中,为防止高速飞行器结构因气动热而产生破坏,通常采用限制驻点热流和总加热量的方式进行热约束[3-6]。但从气动热的相关研究中可见[7-10],高速飞行器结构发生热破坏的最直接因素是温度超过极限,而非热流超过极限,热流仅为该过程的中间量,因此限制驻点热流和总加热量的热约束方式存在表征不合理的缺陷。进一步与工程实际相结合,传统热约束方式还存在以下不足:
1)以通用航空飞行器(Common Aero Vehicle-H,CAV-H)为代表的高速飞行器具有尖锐的端头,热防护设计时通常在端头预留部分柱段允许发生烧蚀,而将防隔热的重点放在大面积机体上,因此限制驻点热流的方式并不完全适用。
2)在总加热量相同的情况下,高速飞行器的防隔热层内外壁温度与加热形式关系密切,例如短时大热流/长时小热流加热、常值热流/波动热流加热对应的飞行器壁面温度具有较大差异。
本文基于一维多层平板传热理论建立飞行器大面积区域传热与热响应模型,通过热响应方程变换和热环境近似拟合,结合传统飞行力学得到包含热响应模型的高速飞行器增广动力学模型。针对定常攻角飞行方案存在跳跃高度较低、高度衰减较快的问题,结合前期轨迹优化研究成果,提出一种高度-速度(Height-Velocity,H-V)反馈控制的轨迹设计方法,使用飞行过程中的高度和速度信息共同调节攻角。针对拉偏情况下内壁温度上边界不确定的问题,提出一种具有内壁温度边界线特征的标称轨迹设计方法,使用最严峻的极值拉偏条件作为输入开展标称轨迹设计工作。针对拉偏情况下大空域反复穿梭跳跃飞行轨迹跟踪误差较大的问题,提出一种H-V 反馈跟踪的在线制导方法,使用飞行过程中的高度和速度偏差信息分别调节倾侧角和攻角,并通过蒙特卡洛仿真验证了设计方法的鲁棒性。
1 高速飞行器增广动力学模型
1.1 高速飞行器增广动力学模型建立
本文以被动热防护系统作为研究对象,其具有简单可靠、技术成熟度高、应用范围广等诸多优势。基于一维多层平板传热理论[11-12],建立的高速飞行器传热与热响应模型如图1所示。
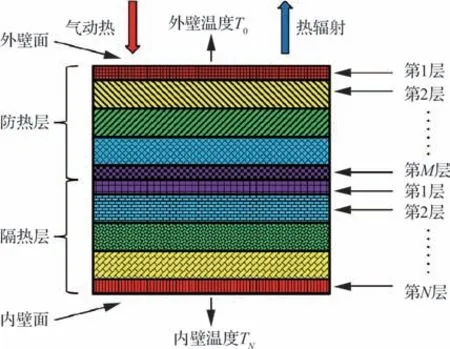
图1 一维多层平板传热模型Fig.1 One-dimensional heat transfer model of multilayer plates
该模型由连续的、不同材料、不同厚度的多层平板所组成,存在沿厚度方向的连续传热。其控制方程表示为
式中:ρ、c、k、T和x分别为材料的密度、比热容、导热系数、温度和厚度;t为传热时间。
外壁面能量平衡方程表示为
式中:qe为气动热流;qinput为外壁面向内传导的热流;σε为向外辐射的热流;σ、ε、T0分别为斯特藩-玻尔兹曼常数、壁面黑度和外壁温度。内壁面则采用绝热内壁假设进行处理。
首先对一维多层平板结构进行空间离散,得到由多个控制单元所组成的区域。其中,各控制单元厚度需权衡材料的物性参数和计算规模综合选取。然后采用控制容积积分法对控制方程进行离散处理,得到离散形式的控制方程表示为
经推导,最终得到高速飞行器传热与热响应模型表示为
式中:TN为内壁温度;Ti为各层温度;Δi为各层离散厚度;为热阻系数。
基于飞行力学理论,建立高速飞行器动力学模型[13]。为突出研究的重点,采用如下假设:
1)地球为均质圆球,不考虑自转和公转。
2)高速飞行器无动力飞行,质量不变化。
3)高速飞行器无侧滑,且满足瞬时平衡。
可得高速飞行器简化的质心动力学模型:
式中:r为地心距;λ为航程角;v为速度;θ为轨迹倾角;L为升力;D为阻力;m为质量;g为重力加速度;υ为倾侧角。
将式(5)和式(4)联立,得到包含热响应模型的高速飞行器增广动力学模型:
可见,动力学模型与热响应模型通过热流qe建立联系,可实现在消耗少量计算资源的前提下获取高速飞行器大面积区域热响应过程的需求。
1.2 仿真参数设定与热环境近似拟合
以CAV-H为研究对象,质量为907 kg,参考面积为0.483 9 m2,阻力/升力系数则参考文献[14]进行拟合,表达形式为
式中:CD为阻力系数;CL为升力系数;α为攻角;Ma为飞行马赫数;ai、bi为常系数。
通过将全飞行剖面内的状态进行网格离散,使用近似拟合方法得到高速飞行器大面积区域(本文选取迎风面1 m 处特定位置为例)的气动热流可表示为
式中:qs为驻点热流;系数f0、f1、f2与选取位置相关。
驻点热流的计算公式为
式中:K为常系数;R为高速飞行器端头半径;ρa为所在飞行空域的大气密度。
飞行器防隔热层物性参数设定如表1 所示。
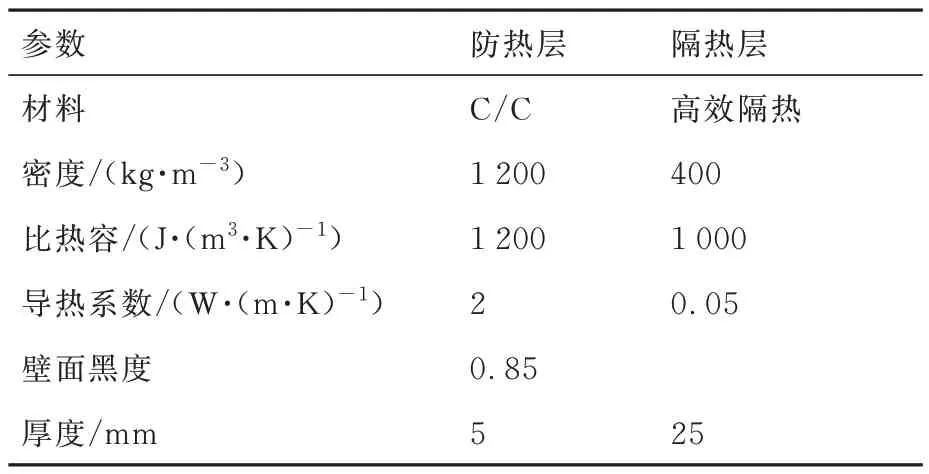
表1 飞行器防隔热层物性参数设定Table 1 Physical parameters setting of flight vehicle thermal insulation layer
通过仿真与分析,选取防隔热层的离散层数分别为2 和10,以兼顾求解精度和计算效率。
过程约束设定为:过载不超过10g;动压不超过350 kPa;迎风面1 m 处特定位置的外壁温度不超过1 573 K,内壁温度不超过573 K。
攻角和倾侧角的约束设定为:攻角变化范围为5°~20°,最大变化速率为1(°)/s;倾侧角变化范围为-90°~90°,最大变化速率为10(°)/s。
1.3 高速飞行器增广动力学模型分析
通过设置不同的初始高度,对于高速飞行器防隔热层热响应过程进行研究分析,仿真条件设定如表2 所示。
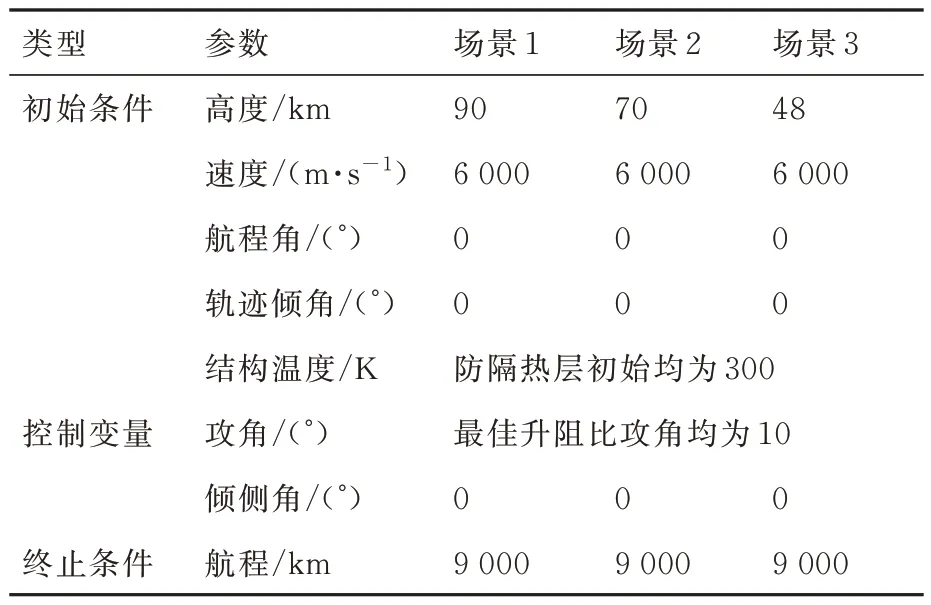
表2 高速飞行器增广动力学模型仿真条件设定Table 2 Simulation condition setting of augmented dynamic model of high speed flight vehicle
设定仿真步长为0.1 s,采用四阶Runge-Kutta方法进行数值求解,仿真结果如图2和图3所示。
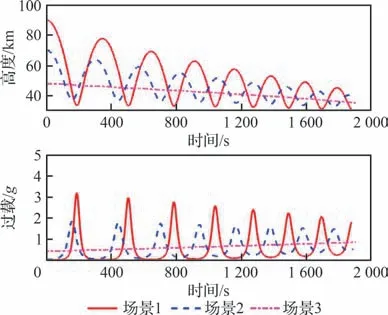
图2 高度/过载-时间的变化情况(不同飞行模式)Fig.2 Variation of height/overload with time(different flight modes)
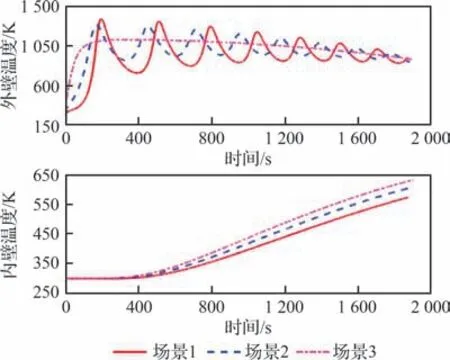
图3 外壁/内壁温度-时间的变化情况(不同飞行模式)Fig.3 Variation of outer/inner wall temperature with time(different flight modes)
由图2 和图3 可见,当初始高度不同时,高速飞行器采取的飞行模式存在较大差异,场景3 为平衡模式,场景1 和场景2 为跳跃模式。平衡模式的主要特点为轨迹较为平直,过载、动压和外壁温度的峰值低、变化小,但由于全程受较高气动热流的持续作用,导致内壁温度偏高;跳跃模式与之相反,其轨迹波动较为剧烈,过载、动压和外壁温度均出现大范围变化,但由于高速飞行器在稠密和稀薄大气空域之间反复穿梭,较高气动热流并未持续作用于飞行器表面,使得内壁温度得以降低。由仿真结果可知,在满足过载、动压和外壁温度约束的前提下,场景1 的内壁温度为573.3K,相较场景3的632.2 K 显著降低58.9 K。由于仍不满足所提出的内壁温度约束要求,因此需进一步开展轨迹设计的相关研究工作。
2 基于热响应特性的高速飞行器轨迹设计
2.1 基于H-V 反馈控制的轨迹设计方法
由1.3 节的高速飞行器增广动力学模型热响应特性可见,采用跳跃飞行模式在降低高速飞行器防隔热层内壁温度方面效果显著。除此之外,跳跃飞行模式还具有如下优势[15-16]:
1)显著增加航程
在跳跃飞行模式下,高速飞行器有较长时间在稀薄大气环境内飞行,受到的大气阻力较小,速度损失较为缓慢,能够显著增加飞行器航程。
2)提高生存能力
高速飞行器在卡门线以内的大空域反复穿梭跳跃飞行,现有探测技术难以发现,即使被发现也无法有效预判其飞行轨迹,这将有效提高飞行器的生存能力,使其有更高概率完成既定目标。
但是由1.3 节的仿真结果可知,采用定常攻角飞行方案存在跳跃高度较低、衰减较快的问题,导致防隔热层内壁温度未能降低到约束范围内。结合参考文献[17]在轨迹优化方面的研究成果,本文提出一种H-V 反馈控制的轨迹设计方法:
式中:α0和αmin为常值攻角;H为高度;V为速度;K0为常数;q0为常值动压。可根据所需的跳跃高度对α0、αmin、K0、q0进行设定。
H-V 反馈控制的轨迹设计方法主要原理为:在大气密度较低、不适合进行跳跃的高空域采用小攻角αmin飞行,从而有效降低高速飞行器表面的气动热流(详见式(8));而在大气密度较高、能够进行跳跃的低空域首先采用过渡攻角α0-V/K0进行交接,避免在拉起时出现过大的过载与动压,然后采用跳跃攻角α0+V/K0进行拉起,从而实现高速飞行器大空域反复穿梭跳跃飞行。这里设定倾侧角为0°的原因在于,倾侧会使飞行器的升力产生分量,虽然起到横向机动的作用,但造成的升力损失会使飞行器出现掉高现象,进一步加剧速度损失和气动加热,这对于高速飞行器的航程和热防护都是不利的。
选取与场景1 相同的仿真条件设定,攻角则根据式(10)结合飞行过程中的高度和速度信息进行调节,参数设定为:αmin=7°,α0=10°,K0=8 000,q0=1×104Pa。仿真结果如图4 和图5所示。

图4 高度/过载-时间的变化情况(H-V 反馈控制)Fig.4 Variation of height/overload with time(H-V feedback control)
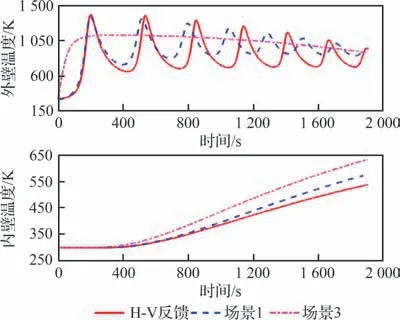
图5 外壁/内壁温度-时间的变化情况(H-V 反馈控制)Fig.5 Variation of outer/inner wall temperature with time(H-V feedback control)
由图4 和图5 可见,H-V 反馈控制的飞行轨迹跳跃高度更高、衰减较为缓慢,有效解决了定常攻角飞行方案存在的问题。虽然导致过载和动压显著增大、波动剧烈,但并未超出相应的约束。与此同时,高速飞行器的防隔热层内壁温度得以进一步降低,此时为538.7 K,相较场景1 下降了34.6 K,相较场景3 下降了93.5 K,已经能够满足内壁温度约束要求,实现预期目标。
2.2 基于内壁温度边界线的标称轨迹设计方法
受到生产制造与试验技术等各方面的制约,高速飞行器的实际性能参数难免存在各种偏差,进行轨迹设计时主要考虑气动偏差和质量偏差。在其他条件相同的情况下,理论上若高速飞行器的升阻比越低、质量越重,则其飞行高度越低、受到气动热的影响越严重[18-20]。下面通过仿真对问题进行呈现和说明。以2.1 节设计的H-V 反馈控制的飞行轨迹作为标称轨迹,相应数据为:终点高度31.3 km,终点速度3 028 m/s,最大外壁温度1 381.3 K,最大内壁温度538.7 K。设定升力、阻力和质量的偏差均在±5%范围内,轨迹数量为2 000 条,采用蒙特卡罗随机组合拉偏,仿真结果如图6 和图7 所示。
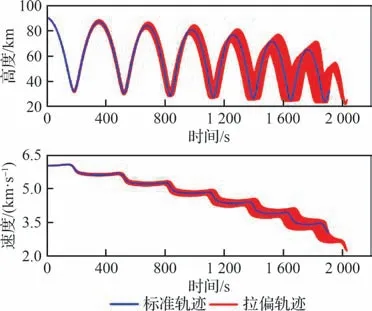
图6 高度/速度-时间的变化情况(传统设计方法)Fig.6 Variation of height/velocity with time(traditional design method)
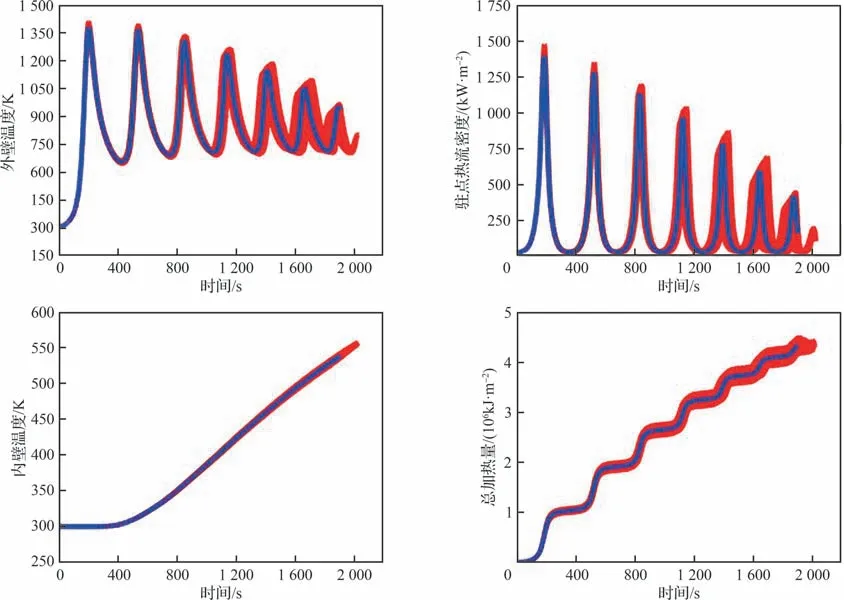
图7 热环境/热响应-时间的变化情况(传统设计方法)Fig.7 Variation of thermal characteristics with time(traditional design method)
由图6 和图7 可见,气动偏差和质量偏差对于跳跃飞行轨迹影响显著,其中终点高度最大偏差为40.3 km,终点速度最大偏差为817 m/s,最大外壁温度为1 408 K,最大内壁温度为558 K。终点高度和速度偏差可以通过制导进行减小,此时的关键问题在于,各类参数偏差导致拉偏轨迹所对应的内壁温度不存在上边界,即内壁温度可能高于也可能低于标称轨迹的对应值,无法形成对内壁温度的上边界约束。此时进行标称轨迹设计则难以确保设计结果是否满足热响应要求,存在反复迭代、影响效率的风险。
此外,从热环境/热响应变化曲线可见,跳跃飞行轨迹导致驻点热流大范围波动,总加热量也随之呈现出波动增长的过程。此时限制驻点热流和总加热量无法有效对内壁温度形成约束,这是因为驻点热流主要与外表面加热相关,而热传导由外向内需要时间,驻点热流的大范围波动使得内壁温度的上升速度难以估计,故无法建立驻点热流和内壁温度之间的直接联系;总加热量虽然与内壁温度相关,但防隔热层物性参数的差异以及加热形式的不同使得总加热量与内壁温度之间难以通过简单的数学公式建立联系,故借助总加热量来约束内壁温度反而会使热约束更为复杂。
为了解决上述问题,本文提出一种基于内壁温度边界线的标称轨迹设计方法,主要设计思想为:以最严峻的极值拉偏条件(例如将前述仿真的升力、阻力、质量分别按照-5%、+5%、+5%进行拉偏)作为输入设计标称轨迹,此时的标称轨迹理论上是飞行高度最低、终点速度最小、内壁温度最高的,则在其他拉偏条件下的内壁温度都不会超过该标称轨迹的对应值,从而形成内壁温度的上边界约束。该方法通过提前挖掘轨迹上的设计裕度,能够有效避免轨迹设计与热防护验证之间反复迭代、相互妥协的现象。
采用H-V 反馈控制的轨迹设计方法,以极值拉偏条件(升力拉偏-5%、阻力拉偏+5%、质量拉偏+5%)作为输入开展标称轨迹的设计工作,参数设定为:αmin=7°,α0=10°,K0=8 149,q0=1×104Pa。所得到的标称轨迹相应数据为:终点高度30.0 km,终点速度2 103 m/s,最大外壁温度1 406 K,最大内壁温度561 K。设定升力、阻力和质量的偏差均在±5%范围内,轨迹总数量为 2 000 条,采用蒙特卡罗随机组合拉偏,仿真结果如图8 和图9 所示。

图8 高度/速度-时间的变化情况(边界约束方法)Fig.8 Variation of height/velocity with time(boundary constraint method)
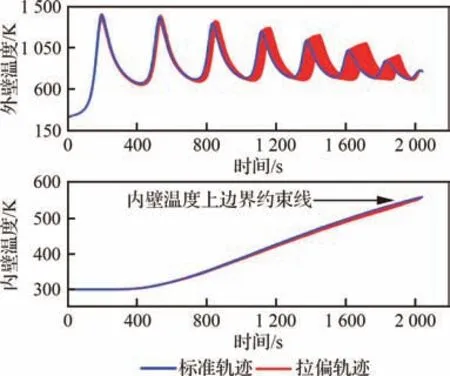
图9 外壁/内壁温度-时间的变化情况(边界约束方法)Fig.9 Variation of outer/inner wall temperature with time(boundary constraint method)
由图8 和图9 可见,此时的终点高度最大偏差为40.7 km,终点速度最大偏差为1 520 m/s,最大外壁温度为1 410 K,最大内壁温度为559 K,拉偏轨迹的最大内壁温度全部都未超出标称轨迹的对应值,实现对内壁温度的上边界约束。因此基于内壁温度边界线的标称轨迹设计方法能够确保标称轨迹在拉偏条件下依然满足各类约束特别是内壁温度约束,实际效果较好。
3 基于热响应特性的高速飞行器制导设计
通过第2 节的研究,已经得到满足各类复杂约束并实现内壁温度上边界约束的标称轨迹。但从2.2 节的仿真结果可见,在拉偏条件下飞行轨迹呈现出散布较大的问题,具体表现为拉偏轨迹的终点高度和速度偏差较大。主要原因在于此时尚未加入制导,同时大空域反复穿梭跳跃飞行模式也加剧了轨迹跟踪上的误差。为了解决该问题,本文提出一种H-V 反馈跟踪的在线制导方法:
式中:K1和K2为常系数;Hstd为标称轨迹对应的高度;Vstd为标称轨迹对应的速度。
H-V 反馈跟踪的在线制导方法主要原理为:在对具有内壁温度边界线特征的标称轨迹(详见式(10))进行跟踪时,在拉偏条件下容易出现速度大于标称速度、高度大于标称高度的情况。此时对速度进行跟踪,基于速度偏差增大攻角,使飞行器的气动阻力增大(详见式(7))从而进行减速,而当速度小于标称速度时则不进行偏差反馈;攻角的增大必然导致飞行器的气动升力增大,加之原本的高度也会大于标称高度,此时基于高度偏差增大倾侧角,使飞行器主动掉高来跟踪标称高度,而当高度小于标称高度时则不进行偏差反馈。通过上述方法可实现对高度和速度的同时跟踪,最终完成对标称轨迹精确跟踪。
此外在设定常系数K1和K2时,应使系统呈现类似“过阻尼”的特性,具体表现为拉偏轨迹的飞行高度始终略高于标称轨迹。这样处理有两方面的用处:首先是确保内壁温度不超过上边界,如果拉偏轨迹的高度相对标称轨迹而言时高时低(类似“欠阻尼”系统来回振荡),则无法实现上边界约束;其次是确保对于飞行高度的跟踪,这是因为大空域反复穿梭时大气密度剧烈变化,一旦起跳点过低或是过高,都会影响到起跳后的轨迹跟踪精度。
以2.2 节的设计结果作为标称轨迹,采用H-V反馈跟踪的在线制导方法,相关常系数设定为:K1=0.08,K2=0.01。设定升力、阻力和质量的偏差均在±5%范围内,轨迹数量为2 000 条,采用蒙特卡罗随机组合拉偏,仿真结果如图10和图11所示。
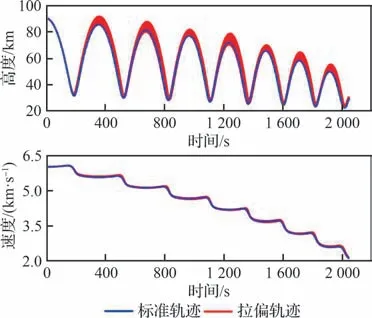
图10 高度/速度-时间的变化情况(H-V 反馈跟踪)Fig.10 Variation of height/velocity with time(H-V feedback tracking)
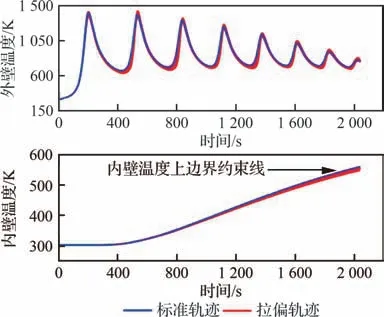
图11 外壁/内壁温度-时间的变化情况(H-V 反馈跟踪)Fig.11 Variation of outer/inner wall temperature with time(H-V feedback tracking)
由图10 和图11 可见,此时的终点高度最大偏差为2.4 km,终点速度最大偏差为145 m/s,最大外壁温度为1 427 K,最大内壁温度为560 K。相较2.2 节未加制导的设计结果,使用H-V 反馈跟踪的在线制导方法较好地完成对标称轨迹的跟踪,同时能够实现对内壁温度的上边界约束。此外,所有拉偏轨迹的过载、动压、外壁温度、内壁温度都处于约束范围内,实现预期目标。
4 结论
本文针对高速飞行器传统的轨迹与制导设计方法存在热约束表征不合理的问题,建立包含热响应模型的高速飞行器增广动力学模型,能够在开展轨迹与制导设计时充分考虑到飞行器表面的动态热响应过程;基于增广动力学模型的热响应特性,提出一种H-V 反馈控制的轨迹设计方法,实现大空域高速反复穿梭跳跃飞行,进一步降低高速飞行器防隔热层的内壁温度;针对拉偏情况下内壁温度上边界不确定的问题,提出一种基于内壁温度边界线特征的标称轨迹设计方法,实现内壁温度的上边界约束;针对拉偏情况下大空域反复穿梭跳跃飞行轨迹跟踪误差大的问题,提出一种H-V 反馈跟踪的在线制导方法,实现对标称轨迹的精确跟踪,并具备较好的鲁棒性。本文所得出的结论如下:
1)建立的高速飞行器增广动力学模型能够获取飞行器的动态热响应过程,呈现飞行轨迹与结构温度变化的关系,可为总体优化提供支持。
2)提出的H-V 反馈控制的轨迹设计方法可在满足过载和动压约束前提下,采用更大幅度的跳跃飞行轨迹实现防隔热层内壁温度的降低,相较传统的平衡飞行模式降温达到93.5 K,效果极为显著,对于轨迹设计而言具有一定的参考价值。
3)提出的基于内壁温度边界线的标称轨迹设计方法能够确保高速飞行器防隔热层内壁温度在拉偏情况下不超过标称轨迹的对应值,从而在标称轨迹设计时完成对内壁温度的上边界约束。
4)提出的H-V 反馈跟踪的在线制导方法立足飞行力学基本原理,从本质上实现对标称轨迹的精确跟踪,简单可行,效果明显,并且通过蒙特卡罗随机组合拉偏仿真验证了该方法的鲁棒性。
