高超声速机动目标拦截多约束解析捕获区
2024-01-20谭一廷荆武兴高长生安若铭
谭一廷,荆武兴,高长生,安若铭
哈尔滨工业大学 航天学院,哈尔滨 150001
以临近空间高超声速滑翔飞行器为代表的新概念武器对现有防空反导系统已造成较大威胁,针对该类强机动突防目标的先进防御技术发展迫切。远程拦截弹弹道一般可分为:助推段、中制导段和末制导段[1]。由于拦截弹大部分飞行时间处于中段和末段,因此针对目标机动突防而采取的弹道修正等反制措施通常由中末制导完成[2]。中末交班条件同时关联中制导终端约束和末制导初始条件,有利交班条件是保障精确中末制导的前提,通常需从捕获区中获取[3]。捕获区为末段弹目需满足的初始状态集合,意义是使拦截器从该集合内任意状态点出发都有能力实现对目标的拦截[4]。然而,为适应临近空间转瞬即逝的可拦截窗口,多约束捕获区的快速构建仍面临着诸多挑战[5]。
在比例导引律的发展过程中引出了捕获区的概念,而蒙特卡洛打靶作为最直接的分析方法,其通过某一初始条件下的弹道积分,根据在某种特定制导律下的终端脱靶量等指标来判断该初始条件是否属于捕获区,却仍存在较大计算负担。为应对瞬变的现代作战场景,逐渐发展了以比例导引律为代表的特定制导律下解析捕获区。Ghose 等[6-7]最早基于非零脱靶量概念在二维和三维弹目视线系下分析了真比例导引与理想比例导引拦截非机动目标时的捕获域。周觐等[8-10]基于零控拦截条件分析了比例导引、反比例导引及最优制导律拦截非机动目标的捕获域,并给出了导航比设置条件,得出了相同条件下反比例导引捕获区要大于比例导引捕获区的结论。为提高末制导律的鲁棒性,针对机动目标拦截的先进制导律下捕获区分析逐渐成为发展重点。Li 等[11-12]基于修正极坐标系,给出了实现微分几何制导律拦截垂直视线方向机动目标,初始视线法向相对速度需满足的捕获条件。Liu 和Shen[13]同样基于修正极坐标系,设计了三维拦截机动形式未知目标的H∞制导律,并给出了拦截器饱和加速度约束下初始接近速度和初始切向速度需满足的约束不等式。以上研究给出了基于某一特定制导律下的捕获区解析形式,为多约束下拦截捕获区分析提供了理论支撑。
目前综合考虑拦截器视场角、饱和加速度等多种约束下的任意机动目标拦截捕获区的分析较少,但针对其中某一或某些约束已有所研究。Feng[14]利用修正极坐标系和修正极坐标变量分别分析了攻击角和饱和视线旋转角速率等约束下纯比例导引拦截非机动目标,和拦截器输入饱和约束下广义理想比例导引拦截有界机动目标[15-16]的带约束捕获区,它们由标准化初始接近速度和初始视线旋转角速率的集合表示。文献[17-18]考虑大气层外拦截场景,通过构造弹目相对状态李雅普诺夫函数,推导了导航比允许边界,并基于该边界分别分析了现实真比例导引和微分几何制导律拦截仅沿视线法向任意形式机动目标的捕获区,其由初始接近速度和初始视线法向速度的捕获条件构成。采用同一方法,文献[19]基于视线旋转坐标系推导了现实真比例导引三维拦截任意方向机动目标捕获区。为进一步补充拦截器饱和过载约束下任意方向机动目标捕获区,文献[20-21]在沿用文献[17-19]制导模型的基础上,采用考虑最小脱靶量和最大接近速度的拦截条件,推导了导航比的修正边界以及初始接近速度的修正捕获条件。至此,拦截器饱和过载单一约束下,比例导引及其扩展形式制导律在大气层外拦截任意有界机动目标的捕获区分析已较为成熟。
由于比例导引法无法保证视线角速率的快速收敛且鲁棒性较差,在短时间内难以实现对强机动目标的有效拦截,因此分析高超声速目标拦截多约束捕获区需以渐近收敛的抗干扰先进制导律为基础。针对临近空间目标拦截场景,文献[22]提出了能量约束下拦截弹攻击区建模方法,并结合空间几何推导了以初始速度方向表示的捕获区;文献[23]推导了不依赖特定制导律的高超声速目标拦截捕获区,但其仅针对常值机动目标;文献[24-25]分别推导了滑模制导律和微分对策制导律拦截高速任意有界机动目标的解析捕获区。以上研究为针对不同场景快速构建中末交班约束提供了参考,然而对拦截器视场角和饱和过载约束仍缺乏考虑。
在过去几年中,依赖改进偏置比例导引[26-28]、状态约束广义模型预测静态规划技术[29]、多项式制导[30]和非奇异滑模面[31]等方法,考虑视场角约束的制导律得到了快速发展,它们虽只针对固定目标拦截或者结构形式复杂不便于解析推导,但却为视场角约束下捕获区分析提供了思路。此外,部分学者利用机器学习中决策树等方法[32-33]对所有初始样本进行快速分类,以设计符合捕获区的中末交班条件,该方法能充分考虑干扰和饱和过载等影响,但对于不同机动形式目标仍需在线训练,实时应用难以保证。其他学者利用神经网络中深度学习等方法[34-35]对空空导弹杀伤包线离线训练拟合以达到攻击区可在线实时计算效果,但其仅针对特定机动形式目标拦截,缺乏一定的通用性。
为完善上述临近空间目标拦截捕获区分析中存在的不足,本文考虑拦截器视场和饱和加速度限制,对机动形式方向任意且有界的目标拦截捕获区进行了分析。首先构建了适配高超声速机动目标拦截的渐近收敛抗干扰末制导模型,并基于稳定性原理证明了视线角速率的有限时间收敛性,给出了视场约束全程满足的条件。进而推导了以该制导模型为基础的多约束解析捕获区:通过构建弹目接近速度与视线旋转角速率的复合李雅普诺夫函数,推导了制导指令有界条件及制导增益可选范围,使得制导指令始终满足饱和加速度限制。然后,基于上述有界条件、增益边界引入更符合现实的拦截判断条件,利用不等式分析得到无视场约束下拦截捕获区,其由初始接近速度、初始视线法向相对速度和初始弹目距离三者的捕获条件构成;额外考虑视场约束时,将非线性规划技术用于不等式分析中,对初始接近速度捕获条件进一步修正最终得到多约束捕获区,其由修正的初始接近速度、初始视线法向相对速度和拦截器初始速度前置角三者的解析捕获条件构成。最后,对比仿真验证了所得结论的正确性,并对捕获区影响因素及变化规律进行了分析。
1 高超声速机动目标拦截末制导模型
为便于后续理解,将本文对制导系统做出的所有合理假设列举如下:
假设1末制导过程中,拦截器机动能力强于目标机动能力,拦截器速度远大于目标速度。
假设2末制导过程中干扰及目标机动有界且最大边界已知。
1.1 弹目相对动力学模型
图1 描绘了末制导二维拦截示意图,M、T分别代表拦截器和目标;OXY为地面参考坐标系;Rm、Rt分别代表拦截器和目标的位置矢量;Vm、Vt分别代表拦截器和目标的速度矢量;q为视线角;θm、θt分别为拦截器和目标速度倾角;γm、γt分别为拦截器速度和目标速度与弹目视线夹角;r、V分别表示弹目相对位置和相对速度矢量,即

图1 弹目拦截几何Fig.1 Interception geometry between target and interceptor
图1 分别以视线和垂直视线方向建立视线坐标系(er,eθ),用ωs=表示视线旋转角速率。根据右手标架旋转定理,视线坐标系下弹目相对运动方程如下所示[17]:
式中:r为弹目相对距离,即r=rer;(atr,atθ)和(amr,amθ)分别为目标和拦截器在视线坐标系下加速度;下标r、θ在后文中代表物理量分别沿er,eθ方向分量。末制导过程中,由于执行机构通常横侧向配置,对弹目接近速度大小一般不作控制,因此仅设计amθ加速度指令使得角速率ωs减为0并保证过程中弹目接近速度<0,即可保证拦截器沿着视线方向接近并拦截目标[12]。
考虑到制导过程中方法误差、外界扰动等影响,将标称模型式(2)改写为式(3),以近似模拟干扰影响下相对运动模型:
式中:dr、dθ代表由方法误差或外界扰动等构成的集中扰动,通常未知但考虑有界:
其中:ηr、ηθ为集中扰动最大边界。
同时考虑目标以任意形式机动,它们同样未知但考虑有界:
式中:αr、αθ为目标机动最大边界。
定义接近速度vr=和视线法向相对速度vθ=rωs,则弹目相对速度V=vrer+vθeθ表示为
式中:vm、vt分别为拦截器和目标速度大小。
1.2 视场约束下拦截末制导律
考虑弹体捷联安装导引头,则探测视场角可近似看作拦截器速度前置角[30-31],即γm∈(-π/2,π/2),其通常需满足单机约束范围:
式中:γmax表示导引头能提供的最大视场角。
定理1对于考虑扰动的制导系统式(3),制导指令am为
式中:k>0 为增益系数;为饱和函数;Δω>0 为设定的零附近的常值阈值。制导律式(9)中所用状态量,ωs均为实际有效测量值,且拦截器初始视场角γm0满足:
则拦截过程中式(8)恒成立,即拦截器始终满足视场角约束,并能实现对任意有界机动目标式(5)的有效拦截。
证明选择李雅普诺夫函数为
将式(11)左右两边对时间求导并结合式(3)和式(9)得
结合不等式(4)和式(5)有:
因此角速率ωs渐近稳定收敛到0,能实现目标式(5)的最终拦截。下面证明拦截器始终满足视场角约束式(8)。
1)在视线角速率ωs收敛过程中式(8)恒成立。
视场角约束式(8)可以等效为式(14):
当角速率ωs未收敛到0 时,根据前面证明可知视线角速率|ωs|此时会渐近收敛,因此|vθ|=|rωs|在拦截过程中同样逐渐减小,即有:
式中:vθ0为视线法向相对速度vθ的初值。根据式(7),由于拦截过程中拦截器速度远大于目标速度,且初始视场角γm0满足式(10),故有|vθ0|≤kc。再结合式(15)可知在角速率ωs收敛过程中,式(14)和关系式|γm|≤|γm0|始终成立,因此式(8)在角速率ωs收敛过程中始终满足。
2)在视线角速率ωs收敛到0 后,式(8)恒成立。
当角速率ωs收敛到0 后,根据式(9)可知拦截器加速度am接近于0。又由几何关系有γm=q-θm,对其求导得
证明结束。
在现实应用中,末制导保证脱靶量在较小的范围内即可实现拦截,同时接近速度应小于设定的阈值,从而保证拦截器对目标的快速碰撞杀伤。因此拦截条件采用如下定义[19]:
式中:tf为制导结束时刻;0 <rmin<r0为允许的最小脱靶量;r0为初始弹目相对距离;为容许碰撞速度常值。
2 多约束捕获区分析
本节基于上述制导模型,进一步分析考虑干扰、拦截器最大机动过载及视窗角约束下的任意有界机动目标拦截捕获区。首先分析了考虑干扰和拦截器最大机动过载情况下增益系数、视线旋转角速率等状态参数边界;基于该状态参数边界推导了由初始相对距离、初始接近速度和初始法向速度等构成的捕获条件;最后考虑导引头视窗角约束,进一步修正捕获条件给出了捕获区。
2.1 制导指令边界和增益取值范围
从弹目相对运动方程式(3)可以看出,拦截器制导模型主要由相对距离、接近速度、视线旋转角速率和制导增益系数等状态参数描述。尤其在考虑干扰影响、拦截器最大机动过载及目标机动时,这些参数的变化规律更加复杂。而在制导律的作用下,它们实际上具有一定的变化范围,这些取值范围也将直接决定拦截器捕获区。
定理2对于考虑扰动的制导系统式(3),采用制导律式(9)对任意有界机动目标式(5)进行拦截,若增益系数满足:
式中:Dr=αr+ηr,且接近速度满足:
则式(20)成立:
证明采用反证法进行证明,假设式(20)不成立,即存在时刻t1,t2∈[0,tf]使得
选择李雅普诺夫函数:
将式(23)左右两边对时间求导并结合式(3)和式(9)得
结合式(4)、式(5)和式(19)有:
证明结束。
定理2 给出了使制导律式(9)生成的指令加速度有界时的增益系数k取值范围,可以看出其加速度边界由增益系数k决定,而实际应用中还需考虑加速度最大限制,即
式中:amax为拦截器可提供的最大加速度,并假设amax>2Dθ意味着拦截器机动能力能完全抵抗目标机动和干扰影响。因此需进一步缩小增益系数k的取值范围,使得指令加速度始终在最大限制内。
定理3对于考虑扰动的制导系统式(3),采用制导律式(9)对任意有界机动目标式(5)进行拦截,若接近速度满足式(19),增益系数k满足:
式中:ωs0为初始视线旋转角速率,且初始相对运动状态满足:
则式(20)、式(21)和式(27)成立。
证明对式(29)进行变形可得到:
结合式(28),则增益系数k可看作由以下2 个关系式决定:
可以看出k按式(31)或式(32)取值均使得式(18)成立,因此条件式(28)和式(29)满足定理2 条件,故式(20)和式(21)成立。根据k的取值,考虑以下2 种情况:
1)当k按式(31)取值时,式(31)右边不等关系式整理得
结合式(21)可知式(27)自然成立。
2)当k按式(32)取值时,式(32)左边不等关系式整理得
由式(20)可知此时δ=|0ωs0|,将式(32)右边不等关系式整理得
结合式(21)可知式(27)自然成立。
证明结束。
2.2 无视场约束下捕获条件
本节将依据拦截条件式(17)以及上一节定理2 和定理3 给出的状态参数边界进一步推导初始相对距离、初始接近速度和初始法向速度等需满足的捕获条件。
根据相对运动方程式(3)~式(5),显然有:
对式(37)两边同时积分得
令f(t*)=0,对应的t*为
在拦截过程中有r(t)≥0,意味着f(t)≥0,将式(39)代入式(38)第1 式则有:
依据该条件及定理2 和定理3 可推导出考虑干扰及拦截器最大加速度限制的任意有界机动目标拦截的捕获条件。
定理4对于考虑扰动的制导系统式(3),采用制导律式(9)对任意有界机动目标式(5)进行拦截,若初始相对运动状态满足:
且增益系数满足:
则有r(t) >rmin,∀t∈ [0,+∞)时,以下关系式成立:
以及式(20)和式(21)成立。这意味着存在时刻tf使得拦截条件成立,保证目标成功拦截。
证明同样利用反证法进行证明,假设式(43)不成立,即假设存在时刻t3∈(0,tf]使得
结合条件式(42)可知当t∈)[0,t3时,定理2成立。根据定理2 可知,将其代入相对运动方程式(3)第1 式可得
将式(46)左右两边同时积分得
当t=0 时,有f(t)=>0,且t=t3时,有,因此若要保证式(47)成立,同时考虑到f(t)的连续性,必存在某一时刻t4∈[0,t3]使得,即
又因为函数f(t)关于r(t)是单调递增的,且r(t4)>rmin,因此有f(r(t4))>f(rmin),写为
根据δ的取值,考虑以下2 种情况。
因此式(50)与式(42)矛盾,说明式(43)成立。此外,时式(33)成立,依此推导得
联立式(42)和式(51)便可证明得到式(41)。
因此式(52)与式(41)矛盾,说明式(43)成立。此外,时式(35)成立,依此推导得
联立式(41)和式(53)便可证明得到式(42)。
综上所述,式(41)和式(42)证明成立,其满足定理2 中增益系数条件式(18),因此在条件式(41)和式(42)下,由定理2 可知式(20)和式(21)自然成立。
证明结束。
定理4 给出了实现干扰影响下任意有界机动目标拦截的增益系数及初始相对状态取值范围式(41)和式(42),而考虑拦截器最大机动能力时,其取值范围还应与定理3 中给出的增益系数及初始相对状态取值范围式(28)和式(29)形成相应的包含关系。
定理5对于考虑扰动的制导系统式(3),采用制导律式(9)对任意有界机动目标式(5)进行拦截,若相对运动状态满足式(29)和式(54):
且制导增益系数k满足式(28),则式(43)和式(27)成立。
证明当式(54)成立时,若|0ωs0|边界满足式(29),则式(41)恒成立,同样依据式(54)可推导得到:
由此可知,当增益系数按式(28)取值时,式(42)恒成立。因此当满足定理5 中条件式(29)、式(54)和式(28)时,定理3 和定理4 同时成立,依据定理3 和定理4,式(43)和式(27)自然成立。
证明结束。
定理5 最终给出了考虑拦截器最大机动能力和干扰影响时,能实现任意有界机动目标拦截的捕获条件,其由初始接近速度、初始视线旋转角速率关系式(29)和式(54),以及增益系数取值范围式(28)构成。为更清晰地用相对运动状态进行描述,将捕获条件(Capture Condition,CC)式(29)和式(54)改写为初始接近速度vr0=0和初始视线法向相对速度vθ0=r0ωs0表示形式:
捕获条件式(56)和式(57)由初始相对距离r0、初始接近速度vr0和视线法向相对速度vθ0之间的关系式组成,捕获条件式(56)、式(57)和式(28)即可看作考虑拦截器最大机动能力和干扰影响时,实现任意有界机动目标拦截的充分条件。
2.3 视场约束下修正捕获条件
考虑到视场角限制,本节将进一步修正捕获条件CC1 和CC2 以得到多约束解析捕获区。
将捕获条件CC2 式(57)中第2 式改写为
可看出b,c<0,计算根的判别式可知:b2-4ac>0,又由于g(0)=c<0,因此函数0 有且仅有一个根,将其记作。又由于vr0<0,则式(58)的解集为{vr0|vr0<-vroot,vroot>0},进而将捕获条件CC2 式(57)改写为
为便于后续分析,同样将捕获条件CC1式(56)改写为如下简洁形式:
考虑正向迎击形式进行拦截,根据式(6)和式(7),将初始目标速度前置角γt0和初始法向相对速度vθ0进行如下代换:
根据式(63)可看出,对于任意满足捕获条件CC2 式(60)的初始接近速度vr0而言,初始法向相对速度vθ0可看作关于拦截器初始速度前置角γm0的函数关系式,进而捕获条件CC1 可转换为对γm0的约束。实际上,对vθ0的表达式(63)分析可知,vθ0在各自分段区间内均是单调递增的,下面以区间内vθ0(γm0)的增减性为例进行说明。
将式(63)第1 式左右两边对γm0求导可得
将式(63)代入捕获条件CC1 式(61)中得
事实上,由于|vθ0(γm0)|在γm0的全区间内关于γm0=0 对称,因此不等式(65)的解集是关于原点对称的。
以γm0∈ [0,π 2)时的解集进行说明:从式(63)可看出,在γm0∈ [0,π/2)区间内存在方程vθ0(γm0)=0 的唯一解,将其记为,可由式(66)计算得出:
式(67)和式(68)可通过简单形式的非线性规划法,如最小二乘法求解得出。根据解集对称性,不等式(65)在γm0∈ (-π/2,0 ]区间内的解集为
结合视场角约束式(10),拦截器初始速度前置角γm0需满足的捕获条件CC3 如下:
补充捕获条件CC3 式(69)成立的前提是γm0不为空集。观察式(63)可发现,随着|vr0|增大:vθ0(γm0)函数曲线在γm0∈ [0,π/2)区间逐渐向左移动,在γm0∈ (-π/2,0 ]区间逐渐向右移动;h*(vr0) 逐渐减小。式(69)不为空集的条件是,考虑极端情况时,此时|vr0|有最小值,即vr0的最大值,将其设为<0,满足:
因此,当额外考虑视场角约束时,原捕获条件CC2 式(60)需进一步限制,对应修改为
需要注意,对于不同初始接近速度vr0,拦截器初始速度前置角γm0允许的变化范围可能不同。为此,定义初始速度前置角可控裕度λ为
3 仿真校验
3.1 捕获条件正确性验证
本节将对考虑干扰、拦截器最大过载及视场角约束下的任意有界机动目标拦截捕获条件式(61)、式(69)、式(71)和定理5 的正确性进行验证。
设动能拦截器与目标初始状态如表1 所示。目标机动加速度上界设为αr=10m/s2,αθ=20m/s2。考虑到导航误差或目标机动加速度估计误差等带来的方法误差[3],将集中干扰最大边界设为dr=0.5m/s2,dθ=0.5m/s2,拦截器最大加速度限制amax=80m/s2。同时考虑拦截器碰撞允许的最小脱靶量rmin=0.2 m,容许接近速度为=-1km/s。考虑拦截器最大视场角为γmax=25°,设置制导律式(9)中饱和阈值Δω=10-5rad/s。

表1 弹目初始状态量Table 1 Initial states of interceptor and target
根据上述条件,式(58)的解集计算为{vr0|vr0<-2 082.8m/s},求解式(70)得到vmr0ax=-3 816.3m/s,因此根据式(71)捕获条件CC2应为CC2:vr0<-3 816.3m/s。由于在拦截器与目标初始速度大小vm0和vt0确定情况下,弹目初始接近速度大小不会超过vm0+vt0,因此捕获条件 CC2 补充为 CC2:-4 500m/s ≤vr0<-3 816.3m/s。
图2 分别给出了上述拦截场景设置下,考虑视场角约束的捕获条件式(61)、式(69)和式(71),以及无视场角约束的捕获条件式(56)和式(57)分别构成的拦截捕获区,可看出无论初始接近速度vr0与初始速度前置角γm0构成的捕获区还是vr0与初始视线法向相对速度vθ0构成的捕获区均具有对称性。进一步观察发现,与不考虑视场角约束情况相比,当考虑视场角约束时,其最大允许接近速度和捕获区均有所减小。这意味着当考虑视场角约束时,在末制导开机时拦截器初始速度需要更靠近视线方向。此外,当不考虑视场角约束时,拦截器可控裕度随初始接近速度减小逐渐减小;当考虑视场角约束时可看出,在满足捕获条件CC1 式(65)的最小视线前置角等于最大视场角时,此时考虑视场角约束下的允许接近速度有最大值,这也验证了修正捕获条件CC2 式(71)的正确性,由于最大视场角限制,因此对应的可控裕度随初始接近速度减小是从零开始先逐渐增大的。
图2 拦截捕获区Fig.2 Interception capture region
为验证捕获条件的正确性,在图2 捕获区内外选择3 种初始状态进行拦截性能分析:初始状态1vr0=-4 400m/s,vθ0=100m/s;初始状态2vr0=-3 000m/s,vθ0=100m/s;初始状态3vr0=-3 000m/s,vθ0=400m/s。其中,初始状态1 对应的便是表1 弹目初始状态,由计算可知,初始视线旋转角速率为ωs0=1.9×10-3rad/s,拦截器初始速度前置角为γm0=12.04°,在考虑视场角约束捕获区内;初始状态2 选在无视场角约束捕获区内,对应的拦截器初始速度倾角修改为θm0=-56.79°,目标初始速度倾角改为θt0=-139.68°,初始视线旋转角速率为初始状态3 选在捕获区外,对应的拦截器初始速度倾角改为θm0=-62.15°,目标初始速度倾角改为θt0=-145.9°,初始视线旋转角速率为
根据以上计算结果可知,在初始状态1 和初始状态2 情况下,|ωs0|均未超过式(29)允许的最大值15.6m·rad/s2,可由定理3 中式(28)计算得到考虑拦截器加速度饱和式(27)时,对任意有界机动目标式(5)进行拦截的制导律式(9)的增益系数取值范围为1.875 ≤k≤4.978,而初始状态3 情况不满足定理3 中条件式(29)。为控制变化因素的单一性,本节对3 种初始状态情况均采用增益系数k=3。此外,考虑目标常值机动αr=,集中干扰dr,dθ考虑为均值为0,标准差为0.167 的高斯噪声。
不同初始状态下捕获性能如图3 所示,其中可以看出,考虑捕获区内外不同初始状态时,由于增益系数设置>0,拦截器均能实现对目标拦截,这符号定理1 中拦截条件。但仔细观察可发现:只有当按照捕获条件式(61)、式(69)和式(71)选择初始状态时,即初始状态1,拦截器在拦截过程中才能同时满足最大加速度限制约束、视场角约束和实现对机动目标拦截;而当初始状态选在不考虑视场角的捕获区内时,即初始状态2,拦截器能在满足最大加速度限制约束下实现对机动目标拦截,但过程中视场角约束不能保证满足;当初始状态选在捕获区之外时,即初始状态3,其虽实现机动目标拦截,但拦截过程中制导加速度、视场角和相对状态|vrωs|均会超出最大限制值。以上对比分析直接验证了捕获条件式(61)、式(69)、式(71)和定理5 的正确性。
图3 不同初始状态下捕获性能Fig.3 Capturability with various initial states
3.2 目标不同机动下捕获性能
下面考虑目标常值机动和正弦机动αr=-5-5sin(2πt+π/2),αθ=-15-5sin(2πt+π/2)2种形式来分析不同增益系数取值下的拦截性能,其中对目标常值机动形式和集中干扰dr、dθ的考虑同3.1 节,以保证目标机动和干扰幅值与前文设置一致。初始状态选择3.1 节中初始状态1,其他参数同3.1 节。分别考虑了增益系数取值范围内外的3 种取值情况,即k=0.2,k=3,k=6,图4展示了不同增益系数取值下对不同机动形式目标捕获性能。

图4 目标不同机动下捕获性能Fig.4 Capturability with various maneuvering targets
从图4(a),图4(c)~图4(e)可看出,由于k>0 且初始视场角满足视角约束,拦截器均能成功拦截目标,并且在拦截过程中,视线旋转角速率和视线法向相对速度均会渐近收敛到零,拦截器视角始终在视场之内,这也验证了定理1 的正确性。进一步观察发现,视线旋转角速率和视线法向相对速度的收敛时间与目标机动形式及增益系数大小相关,在同一目标机动形式下,增益系数设置越大,它们的收敛时间越短。结合图4(b)来看,增益系数设置越大,尽管ωs和vθ收敛时间越短,但需要以在末制导初始阶段增大制导加速度为代价。当增益系数取值超出式(28)的取值范围时,制导需用加速度在初始阶段会超出拦截器饱和加速度限制,这也验证了定理3 的正确性。而当增益系数取值小于式(28)允许的最小值时,尽管全程制导加速度较小,但ωs和vθ可能需要在拦截时刻才收敛到0。
从图4(f)和图4(g)可看出,在拦截过程中,接近速度基本只与目标机动形式相关,而受增益系数影响较小;|vrωs|的变化基本与视线角速率的变化一致,在拦截过程中未超过式(29)允许的最大值42.9m·rad/s2,体现了有界性。
3.3 捕获区影响因素分析
从捕获条件式(61)、式(69)和式(71)的计算过程可以看出,捕获区的大小受最大视场角、拦截器饱和加速度和目标机动边界等参数值影响。图5~图7 分别展示了不同视场角约束、不同饱和加速度和不同目标机动上界下的捕获区及可控裕度变化曲线。从图5 可看出,捕获区随着最大视场角的减小而缩小,其主要体现在对允许的最大初始接近速度和拦截器最大初始速度前置角的限制上,它们均随最大视场角的减小而减小。而当视场角约束不同时,对于同一初始接近速度vr0,拦截器初始速度前置角γm0边界或初始视线法向相对速度vθ0边界均有重合。此外,同一初始接近速度vr0下,可控裕度会随最大视场角的减小而减小,这意味着视场角限制越严格,要求拦截器初始速度越靠近视线方向且可调整范围越小。
图5 不同视场角约束下捕获区Fig.5 Capture region with various field of view constraints
图6 和图7 展示的不同饱和加速度和不同目标最大机动下的捕获区变化规律相似,当拦截器饱和加速度越小或目标最大机动越大时,捕获区越小。其主要体现在对允许的最大初始接近速度和允许的最大初始视线法向相对速度的限制上,它们均随拦截器饱和加速度的减小或目标最大机动的增大而减小,而不同饱和加速度或不同目标最大机动下,vr0与γm0捕获区虽有所变化,但允许的最大初始速度前置角保持不变。这说明当拦截器饱和加速度减小或目标最大机动增大时,若拦截器仍想以较大初始速度前置角进入末制导,则需要调整初始作战位置使得目标初始速度前置角增大。此外,同一初始接近速度vr0下,可控裕度同样随饱和加速度的减小或目标最大机动的增大而减小。
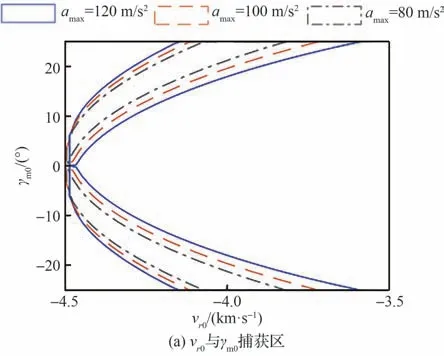
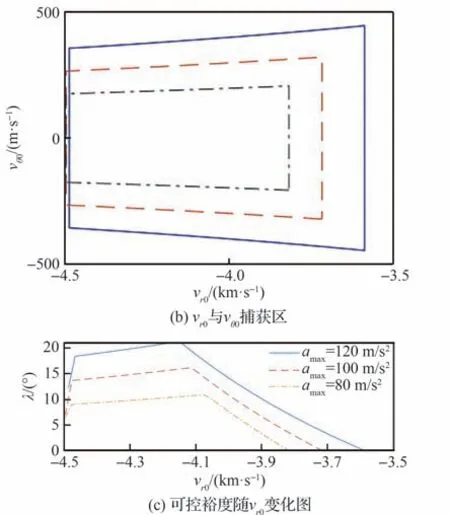
图6 不同饱和加速度下捕获区Fig.6 Capture region with various acceleration saturation


图7 不同目标机动上界下捕获区Fig.7 Capture region with various bounded maneuverability
综上分析,若希望扩大考虑拦截器加速度饱和限制和视场角约束下任意有界机动目标的拦截捕获区以及拦截器初始速度方向的可调整范围,拦截方可从增大导引头视场角或增大最大机动加速度等方面进行考虑。
4 结论
1)基于渐近收敛的抗干扰末制导律,推导了高超声速任意有界机动目标拦截的多约束解析捕获区及制导增益允许取值范围。所推导的多约束捕获区由修正的初始接近速度、初始视线法向相对速度和拦截器初始速度前置角三者的解析捕获条件构成。理论证明了在增益设置满足所给范围情况下,拦截器从该捕获区内任意初始状态点出发,均能有效拦截任意有界机动目标且保证制导加速度不超过允许上限以及视场约束全程满足,并满足终端脱靶量小于允许阈值且接近速度小于容许碰撞速度。
2)所推导的多约束解析捕获区考虑了弹目非线性相对运动模型,进一步补充修正了无视场约束下的捕获条件,具有在线快速响应潜力。基于本文结论,推广考虑导引头、自动驾驶仪等特性的三维解析捕获区将作为未来研究重点,使其在临近空间拦截场景应用中更具一般性。
3)对比仿真验证了所得结论的正确性,并从捕获区影响因素分析中得出,拦截方可从增大导引头视场角或增大最大过载等方面来增大捕获区。
