运载火箭自适应增广控制参数设计及稳定性裕度分析
2024-01-16赵康伟胡存明
张 亮, 刘 思, 赵康伟, 胡存明
(1. 中山大学航空航天学院, 广东 深圳 518107; 2. 上海航天控制技术研究所, 上海 201100)
0 引 言
目前运载火箭在飞行过程中存在的不确定因素较多,例如火箭的飞行高度、飞行速度、大气条件的变化以及火箭内部结构干扰等因素,导致箭体姿态动力学模型参数存在很大程度的时变性和不确定性。上述这些不确定因素将使得姿态控制系统的稳定裕度发生较大改变。针对运载火箭主动段飞行过程中存在的刚-弹-晃-发动机谐振等强耦合、参数不确定性和复杂干扰条件,如何设计先进的自适应控制方法,提高系统的鲁棒性,是一项具有挑战性的研究课题。而基于经典频域理论离线设计模式的比例-积分-微分(proportional-integral-derivative,PID)控制系统存在保守性较强的缺点。近年来,针对这一问题发展了一种新的控制方法——自适应增广控制器(adaptive augmenting control,AAC),该方法可与传统PID控制律结合构成新的火箭控制系统,在无干扰情况下不影响传统PID控制器的工作。而当控制系统面临较大弹性振动、液体晃动、结构误差和风干扰等情况时,AAC可使用传感器数据在线自适应调整增益参数,进而提高系统的控制性能与稳定性[1]。
在AAC发展历程中,最早是Mark对运载火箭的自适应控制技术进行了初步研究,随后David提出早期的前向增益自适应控制,为AAC技术的结构形成提供了帮助,而Hanson等[2]则对AAC的技术成熟迈出了关键一步。Brian在战神-I火箭的PID控制基础上加入了混合自适应补偿控制器,形成混合增广自适应PID控制器[3]。马歇尔太空中心飞行力学与分析科为提高运载火箭的鲁棒性和性能,在星座计划中基于经典自适应控制算法,发展了AAC以适应不可预知的环境和多种飞行动力学特性。目前该算法逐渐成熟并且通过了一系列的实际飞行测试,例如SLS火箭、F/A-18、X-15等[4-8]。
随后,AAC被广泛应用于飞行器控制系统设计中。例如Luke等[9]针对四旋翼飞行器,开展了AAC的控制器设计和应用研究,证明了良好的自适应性。Diego等[10]针对欧洲的Vega固体运载火箭,提出AAC+H∞/线性变参数系统(linear parameter varying system, LPV)[11]的鲁棒控制器,并成功通过了火箭的控制系统测试。美国航空航天局(National Aeronautics and Space Administration, NASA)兰利研究中心动力学和控制实验室的Jing等[12]则在车-杆系统中成功应用了AAC控制算法。Brinda等[13]针对一种典型的两级运载火箭单独在俯仰通道考虑了弹性振动、液体晃动、发动机振动和执行器作动等进行AAC设计,并采用了切比雪夫陷波器进行高通滤波器设计(截止频率为刚体频率的2倍),同时采用了巴特沃斯型低通滤波器(截止频率接近刚体频率)。Tannen等[14]介绍了一个鲁棒的自适应增广控制方案,通过实时环路自适应方式增强传统的控制器,当跟踪误差较大时,标称设计的闭环增益会增大,而当激发的弹性振动和液体晃动信号被检测到时,可以降低闭环增益。此外,类似的研究还有文献[15-19],由此可知,AAC控制方法具有较为广阔的应用场景。
目前国内针对自适应增广控制技术,主要研究了基于增广变量法的方式进行自适应控制器设计,其典型代表主要有陈志勇[20]、陈力[21]、洪昭斌[22]等。而类似国外AAC自适应调节增益的控制结构,国内则有高军礼等[23]基于模型参考自适应控制通过李雅普诺夫函数设计了可调增益控制律。肖冰等[24]针对挠性卫星姿态跟踪问题提出了自适应L2增益控制,并采用李雅普诺夫函数进行了稳定性证明。张建明等[25]提出PID自适应调整增益的神经元非模型控制方案。韦常柱等[26]则借鉴AAC的思路开展运载火箭控制系统设计,并采用粒子群方法开展了陷波器参数设计。Zhang等[27]提出自适应增广容错控制方法,将AAC与自适应振动频率辨识和容错控制结合起来提高了姿控系统的鲁棒性和容错性。此外还有崔乃刚[28]、何飞毅[29]、徐世昊[30]、张晋[31]以及祝大利[32]等也开展了大量的研究,取得了较好的成果。
然而,上述研究中大多数是基于传统的AAC控制结构开展控制器设计,控制参数需要反复试凑,尚无合理有效的设计准则。Domenico等[33]针对此问题,基于遗传算法开展了AAC控制参数的优化设计,但该方法依赖于合适的性能指标以及优化参数数量选取等,可能存在算法不收敛的问题。因此,有必要给出一种简洁且具有实际工程指导价值的AAC控制参数调节方法和准则。
此外,对AAC控制器开展稳定性分析也是一项极为重要的工作。为此,NASA专门组织了大量研究人员开展了AAC控制器的稳定性评估工作[34](历时两年时间),主要研究了非线性的李雅普诺夫稳定性方法、经典的静态AAC增益变化稳定性分析、基于圆判据的广义增益裕度分析方法(generalized gain margins,GGMs)、时域稳定裕度方法(time domain stability margins,TDSMs)、增强型蒙特卡罗打靶仿真分析方法、极限拉偏条件评估方法以及基于描述函数的分析方法等。其中较为重要的工作是Mark等[35]基于李雅谱诺夫方法证明了AAC中除了弹性振动项的其他两项自适应律的稳定性。而Angelov等[36]基于描述函数法给出了等效的开环增益值,同时也给出了增益参数的设计依据,但由于采用了简化模型,其高低通滤波器参数设计结果与实际并不一致。因此,这些研究结果表明,尚缺少比较完整、严格的理论证明结果,需要进一步深入研究。
综上所述,本文针对AAC实际应用过程中具有重要研究价值的参数设计方法准则和稳定性分析方法开展系统的研究,给出一种较为合理可行的分析方法,以指导火箭的控制系统设计,从而提高火箭的控制性能。
1 火箭的动力学及比例-微分控制器设计
针对常见的运载火箭动力学模型,以俯仰通道为例,可基于文献[26]推导如下所示的小扰动线性化方程:
(1)

(2)
式中:W为风速;Wi(XXT)为振型斜率;A是风向角;ST为速率陀螺;XST是速率陀螺的安装位置。惯组WJL(s)、速率陀螺WST(s)和伺服机构的传递函数WSF(s)分别为
(3)
式中:ωJL,ωST1,ωST2,ωSF1,ωSF2,ωSF3,ωSF4,ωSF5,ωSF6是惯组、速率陀螺和伺服机构传递函数的频率;ξJL,ξST1,ξST2,ξSF3,ξSF4,ξSF5,ξSF6是阻尼系数。
假设比例-微分控制系统中的静态增益为a0,动态增益系数为a1。利用克莱姆法则对式(1)和式(2)进行拉普拉斯变换,然后计算开环传递函数有:
(4)


图1 第50 s特征点的开环传递函数Nichols图Fig.1 Nichols of open loop transfer function at 50 s

(5)
则开环传递函数校正后的曲线如图1红线所示。
由图1可知,经过校正网络后,系统的幅值曲线在高频段均被压制在0 dB以下,保证了高阶的幅值稳定特性,且幅值裕度为18.3 dB,截止频率为3.42 rad/s,相位裕度44°,能够满足实际控制需求。
2 AAC参数设计
传统的AAC使用的是前向增益自适应控制系统,主要包含3部分[29]:自适应律、参考模型和谱阻尼器。即有如下形式:
(6)

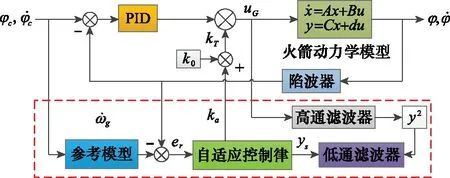
图2 ACC框图Fig.2 ACC block diagram
AAC的设计过程主要是如何确定参考模型参数、高/低通滤波器参数、调节参数k0,kmax,a,α,β。下面给出具体的设计方法和准则。
(1) 上下限k0和kmax的设计
在传统飞行器控制系统设计中,一般要求幅值裕度Gmin>6 dB,则比例-微分控制系统的幅值裕度的可变化范围为±6 dB,根据常值开环系数的bode图绘制依据,可反求得增益的上下限为
20lg(kT,min)=-Gmin
20lg(kT,max)=Gmin
(7)
即可得k0=1-kT,min,kmax=kT,max-k0。另外一种方法是根据开环系统Nichols图[33],获得空气动力的幅值裕度点GMaero,刚体的幅值裕度点GMrigid,则可利用等式20lg(k0)=-GMaero,求得:
(8)
(2) 参考模型参数设计
参考模型的设计一般是希望获得理想的刚体控制信号,则可建立与静态增益和动态增益相关的参考模型,即有:
(9)

(3) 高低通滤波器参数设计
传统的火箭控制系统设计中,大多数只用到低通滤波器,而为了获取火箭飞行中的弹性振动信息,可设计高通滤波器在线处理。具体而言,就是通过采集发动机摆角指令,使其通过高通滤波器去除低频信号(一般是刚体或晃动的耦合信号),而剩下的信号主要是弹性信号加噪声。为了评估剩余信号的幅值大小,可对信号进行取正处理(例如平方或绝对值)。针对高通+取正处理之后剩余信号依然抖振较为严重的问题,此时再通过低通滤波器可将信号进行平滑处理,从而得到合适的ys信号以供增益的自适应调整。
高低通滤波器参数设计应依据系统截止频率,一阶或二阶弹性振动频率等参数,选择合适的频率值和阻尼比,使得高通滤波器滤除刚体信号。一般可设计二阶的高/低通滤波器。
(10)

(11)

(4) 调节参数a,α和β的设计方法
AAC核心是自适应律,其包含了多个控制参数,但其参数调整是一个难点,为此本文提出了解析法的设计思路。首先,确定自适应律中误差er的最大值ermax和弹性振动影响项的最大值ysmax。一般可有两种估算方法:工程经验法和直接数值打靶仿真法。比如在前者工程设计中一般要求ermax≤3°和ysmax≤0.000 3。而在打靶仿真中则将火箭飞行过程中的内外干扰全部加上,然后只需要高通滤波器、低通滤波器和参考模型介入,通过观察er和ys的输出曲线,获得最大值。最后,根据AAC控制律的形式(如式6所示),从开环增益kT的时域响应中得到如下解析表达式:
(12)
式中:Δter为误差响应时间;Δtys为弹性振动位移响应时间,分别表示了开环增益kT从1到最大值kTmax和最小值kTmin的时间。通过选择期望的增益响应时间Δter和Δtys,最后反求增益a和α,表达式为
(13)

而β一项主要保证开环增益趋近于1,其值越大表明其收敛时间越快,通常其取值范围为β∈[0.001,0.3]。另外,也可将式(6)进行简化处理后拉普拉斯变换[36]可得
(14)
基于文献[36]中描述函数的设计思路,将式(11)中uG采用误差er代替,代入高低通滤波器后可得:

(15)

最后为检验AAC中设计参数的有效性,特别是a、α和β的值,可采用标称状态下的火箭参数开展全程的六自由度仿真验证,基于设计的比例-微分+校正网络+AAC,最终保证火箭主动段飞行过程中的开环增益kT趋近于1。
3 ACC稳定裕度分析
本文将结合正弦输入信号法开展AAC的稳定裕度分析,推导开环增益kT的时域响应结果。首先,假设误差er满足正弦输入条件[36]er=γsin(ωt),则根据式(11)有:
yHP(t)=γ|GHP(jω)|sin(ωt+φHP(jω))
(16)
式中:φHP(jω)为高通滤波器GHP(s)的相位。此外,利用三角函数式(sinω)2=0.5(1-cos(2ω)),同理可得ys:
(17)

(18)
进一步可得:
kT(t)=R+A1γ2cos(2ωt+φβ(2ω))+
A2γ2cos(2ωt+2φHP(ω)+φLP(2ω)+φβ(2ω))
(19)
式中:φβ(2ω)为Gβ(s)相位,频率为2倍Gβ(s)中心频率;A2=0.5α|GHP(jω)|2|GLP(2jω)||Gβ(2jω)|;R=1+(γ2/2β)(a-α|GHP(jω)|2|GLP(0)|);A1=-0.5a|Gβ(2jω)|。此外,再将开环增益进行处理为y=kTer,则代入式(19)可得:
y(t)=Rγsin(ωt)+A1γ3sin(ωt)cos(2ωt+φβ(2ω))+
A2γ3sin(ωt)cos(2ωt+2φHP(ω)+φLP(2ω)+φβ(2ω))
(20)
再次根据三角不等式:
(21)
可得:

(22)
由此可知,式(22)的第1、2行为信号y(t)的基波信号,而第3、4行为三阶谐波信号,一般可忽略不计,因此整理可得:
(23)
式中:φ1=φβ(2ω),φ2=2φHP(ω)+φLP(2ω)+φβ(2ω)。将-A1·sin(ωt+φ1)-A2sin(ωt+φ2)进行整理为ARsin(ωt+φr),则有:
y1(t)=Rγsin(ωt)+(γ3/2)ARsin(ωt+φr)
(24)
式中:
(25)
再次将式(24)进行整合,最终有
y1(t)=Ayγsin(ωt+φy)
(26)
(27)

4 仿真校验

(1) 无干扰仿真
当外界无干扰,火箭参数无偏差时,开环增益响应曲线如图3所示。由图3可知,本文所设计的AAC控制参数可以保证在无外界干扰时只需要比例-微分控制器即可保证稳定,且开环增益将稳定在1附近,满足AAC控制参数设计准则。

图3 无干扰时开环增益Fig.3 Open-loop gain without disturbances
(2) 大频率偏差干扰仿真
当考虑到一阶弹性振动频率是初值的0.35倍时,由于振动频率与晃动频率和刚体频率接近,此时将导致系统出现弹性不稳定现象,如图4所示。

图4 大频率偏差的仿真结果Fig.4 Simulation result with large frequency error
由图4可知,当加入AAC控制律之后,系统不稳定发散的趋势很快就衰减,并趋于稳定,且开环增益在快速下降至0.6左右,从而拉开了频率间隔,保证了弹性稳定,但同时也将导致姿态误差变大。
(3) 大干扰条件
当动力系数b2发生较大偏差,真实值为理论值的3倍时,即遭遇了大干扰飞行环境,则将导致姿态误差变大,通过采用AAC控制律,得到如图5所示的仿真结果。

图5 大干扰条件的仿真结果Fig.5 Simulation result with large disturbances
由图5可知,当突发环境大干扰时,开环增益将逐渐增大,从而降低火箭飞行过程中的姿态误差,同时也尽可能的保证了弹性振动和液体晃动的稳定,证明了AAC可以适应突发大干扰的飞行环境。
(4) 转动惯量大不确定性
假设火箭的总体参数存在不确定性,如转动惯量或者发动机推力的不确定,将导致动力系数b3和c3发生变化,假设火箭转动惯量偏差为-45%,则有如图6所示的仿真结果。


图6 转动惯量不确定的仿真结果Fig.6 Simulation result with inertia uncertainty
由图6可知,当转动惯量不确定性较大时,将导致姿态发散,进而使得飞行任务失败。而当采用AAC后,可以通过降低开环增益从而保证系统的稳定性,证明了AAC具有良好的鲁棒性能。
最后,为了评估AAC的稳定裕度,采用第3节中介绍的裕度分析方法,假设γ=0.5/57.3,其他参数同前述无干扰的仿真条件设计一致,取第50 s特征点的参数,则有图7所示仿真结果。

图7 AAC的响应曲线Fig.7 Response curve of AAC
AAC叠加火箭的开环系统传递函数之后的bode图如图8所示。

图8 AAC+比例-微分系统的bode图Fig.8 Bode diagram of AAC+proportional-derivative
由以上仿真结果可知,单独的AAC幅值响应在1 dB左右,叠加进入控制系统中后,幅值裕度变为17.08 dB,与标称状态(18.3 dB)变化不大,从而结合图3的结果表明了所设计的AAC参数在时域和频域上都是稳定的,且不影响基本比例-微分控制器的使用。
当单独提高参数a=180,α=8 160,γ=2/57.3或β=0.1时,可得到结果如图9所示。


图9 不同参数变化的AAC幅值响应Fig.9 Amplitude response of AAC with different parameters
由图9可知,通过增加参数a或γ将降低系统的幅值裕度,而这两项参数均是提高开环增益的关键因素。因此,开环增益增大之后,系统的稳态误差将降低,但同时也将导致稳定裕度下降,这与实际比例-微分控制系统中提高静态增益后的幅值裕度结果趋势是一致的。同时,当增加α或β值之后,则会提高系统的稳定裕度,这与自适应律式(6)中的结果是一致的,即β提高渐进稳定性,而α将降低开环增益kT从而提高幅值裕度。因此,该稳定性评估方法能够反映实际调节参数变化规律引起的系统稳定性变化,从而证明了该方法是实际可行的。
5 结 论
本文针对运载火箭应用AAC过程中亟待解决的参数设计准则和稳定性分析方法开展了系统的研究,给出了一种较为合理可行的分析方法。针对某型火箭的总体参数,基于给出的准则设计AAC控制参数能够适应大频率偏差、突发大干扰和火箭惯量参数的不确定性。本文提出的稳定性评估方法能够证明在无干扰条件下AAC的时域响应趋近于1,而频域中的幅值裕度响应也将在1 dB左右,表明了AAC在无干扰时不影响正常比例-微分控制器的使用。同时,仿真结果也表明了a,γ,α和β参数的裕度变化与实际参数变化响应一致。因此,研究结果表明了本文所设计的方法能够指导自适应增广控制在实际工程中的应用。
