车载毫米波雷达多径假目标分析与消除方法
2024-01-16郑晶月吴佩仑陈家辉郭世盛崔国龙
郑晶月, 吴佩仑, 陈家辉, 郭世盛, 崔国龙,*
(1. 电子科技大学信息与通信工程学院, 四川 成都 611731;2. 航空工业第一飞机设计研究院, 陕西 西安 710089)
0 引 言
随着智慧交通在全球快速发展,车载毫米波雷达作为基础传感器在目标检测、目标位置、速度估计等领域均有广泛应用[1-3]。在实际城市道路多径环境中,当采用车载毫米波雷达进行目标定位时,雷达回波中不仅包括探测目标的直视路径回波,还会包含由道路旁护栏、建筑墙壁等反射面产生的反射路径回波,反射多径回波的存在将严重影响车载雷达的目标检测与定位性能[4-6]。因此,根据受到多径干扰的原始回波进行定位后,初始定位结果将包括目标真实定位点及多径产生的假目标[7-8]。这些多径假目标可以视为真实目标的衍生目标,需要对多径假目标进行消除以获得目标真实位置坐标。
近年来,国内外许多学者关注到多径效应对雷达探测性能的影响,开展了多径消除技术的方法研究,目前多径消除方式按雷达信号处理的不同阶段可分为3类。第1类是改变雷达阵列配置来抑制多径,该方法利用了多径目标存在视角依赖(aspect-dependent, AD)的特性,即多径目标位置会随阵列位置的变化而变化。在文献[9-13]中,通过改变分布式天线阵列结构并利用图像加权策略抑制了多径成像假目标。在文献[14]中,通过阵列旋转模式并结合图像融合算法消除多径成像假目标。在文献[15-16]中,通过设计车载毫米波雷达天线阵列结构有效抑制了多径信号分量。与第1类不同,第2类利用脉冲压缩后的回波距离特征来抑制多径。文献[17]中,通过对距离像轨迹进行拟合实现多径距离轨迹识别与消除。在文献[18]中,通过区分直视路径与反射路径的距离特征来识别并消除道路场景中的多径假目标。在文献[19]中,根据目标距离轨迹时间连续性,对多径距离延迟误差进行估计补偿。在文献[20]中,利用最小二乘方法抑制多径距离误差,但需要利用先验知识识别多径信道。为了弥补上述方法的缺陷,在文献[21]中,将多径距离误差建模为一个凸优化问题来消除多径,且无需信道的先验信息。第3类是根据多普勒、方位角、极化信息等其他回波处理结果,区分真实目标与多径目标,进而消除多径假目标。在文献[22]中,通过在距离和多普勒空间中应用匹配滤波技术来抑制多径回波。文献[23]中,对距离—多普勒图应用霍夫变换实现对多径假目标的识别。在文献[24]中,基于多径假目标方位与车辆运动方位不匹配的特征,可以识别并消除假目标,但是该方法会受车辆姿态估计精度的限制。在文献[25]中,通过区分车辆目标直视路径和反射路径的极化信息,可以识别出假目标。在文献[26]中,根据信号强度进行阈值分割来消除多径假目标。在文献[27-28]中,利用机器学习方法识别并消除多径假目标。在文献[29-30]中,基于深度神经网络方法消除多径成像假目标。
本文研究了城市道路多径环境下目标的准确定位问题,根据多径假目标与真实目标不同的空间位置特征,基于车载毫米波雷达提出了一种多径假目标匹配消除方法,该方法通过目标距离检测、最小方差无失真响应(minimum variance distortionless response, MVDR)测角定位等步骤获取初始定位结果,然后利用初始定位点迹来计算多径假目标理论位置,进而对初始定位结果进行匹配识别,消除隐藏在其中的多径假目标点迹,实现了真实目标的准确定位。
1 信号模型
1.1 多径传播建模
将城市道路环境中的护栏、建筑墙壁简化为反射面,车载毫米波雷达探测目标场景如图1所示。毫米波雷达系统位于反射面右侧,以雷达O为原点(0,0)建立直角坐标系,其中,反射面与坐标系y轴平行,雷达与反射面的横向距离为L。目标Q11沿着反射面向前运动,处于雷达左前方的直视区域。由于存在反射面,雷达发射的电磁波信号可通过直视路径Γ1直接到达目标,也可通过反射路径Γ2到达目标位置。根据电磁波镜面反射原理,电磁波通过反射路径探测目标Q11时会产生关于反射面对称的镜像假目标Q22,并在反射面产生反射点P。

图1 电磁波传播模型Fig.1 Propagation model of electromagnetic waves
因此,上述场景中雷达探测直视目标的主要存在4种电磁波双程传播路径,每种路径的电磁传播过程列于表1中。其中,路径Γ11定义为双程直视路径,也是实现真实目标准确定位的最主要电磁传播路径。而路径Γ12代表直视路径+反射路径的组合路径,路径Γ21为反射路径+直视路径的组合路径,路径Γ22为双程反射路径,后面3种路径可定义为多径,直接对多径回波进行定位将会产生多径假目标。因此,为了获取目标的真实定位结果,本文将保留双程直视路径回波产生的真实定位结果,并消除多径回波产生的假目标定位点迹。

表1 电磁传播路径Table 1 Electromagnetic wave propagation paths
1.2 回波模型
设毫米波雷达发射的线性调频信号为s(t),其表达式为
s(t)=A0exp(j2πf0t+jπμt2)u(t)
(1)

(2)
考虑以上4种电磁传播路径,接收回波信号可以表示为
z(t)=σ1s(t-τ11)+σ2s(t-τ12)+
σ3s(t-τ21)+σ4s(t-τ22)+n(t)
(3)
式中:σ1~σ4代表4种传播路径的散射系数;n(t)代表噪声;τ11,τ12,τ21,τ22分别代表路径Γ11,Γ12,Γ21,Γ22的传播时延。
τ11,τ12,τ21,τ22对应的传播时延计算式如下:
(4)
式中:c代表光速。因为镜像假目标Q22和目标Q11关于反射面对称,所以有|PQ11|=|PQ22|,由式(4)也可以发现,4种路径传播时延主要取决于真实目标Q11和镜像假目标Q22的位置,且多径Γ12和Γ21的传播距离及时延相同。
2 多径假目标消除方法
本节介绍单反射面场景下基于车载毫米波雷达的目标定位及多径假目标消除方法。所提出的多径假目标消除算法首先需获取目标的初始定位结果,然后对多径假目标理论位置进行分析,最后对初始定位点迹采用多径假目标匹配消除处理以获得目标真实准确的定位结果。
2.1 目标初始定位
2.1.1 目标距离测量
为了能够有效抑制雷达回波中的固定背景杂波,考虑采用动目标指示(moving target indicator, MTI)方法[31-32]消除环境中固定的强杂波信号,保留运动目标的回波信号。对于采样后两个相隔I个脉冲的回波数据,如zi和zi-I,此时MTI方法具体可表示为
(5)

x(i)=[x(i,1),x(i,2),…,x(i,j),…,x(i,Nc)]
(6)
式中:x(i,j)代表第j个距离单元的幅值;Nc代表距离单元数。
为了增强目标处幅值能量以提升检测性能,对距离像x以NT个脉冲为一帧进行非相干叠加,假设距离像x共有NA个脉冲,那么经过非相参积累后共有NF=NA/NT帧距离像。非相参积累是对一帧距离像取绝对值再进行帧内累加运算,其过程可以表示为
(7)
式中:|·|代表取绝对值运算;u(h)(h=1,2,…,NF)代表第h帧非相参积累后的信号。
对距离像非相参积累处理后,采用单元平均恒虚警率(cell averaging-constant false alarm rate, CA-CFAR)检测方法[33]对积累后距离像u(h)进行检测。对于第j个距离单元,检测门限THj可表示为
(8)
式中:Pj为虚警概率;Nr代表参考单元数。
之后根据自适应判断准则比较检测门限THi与待检测单元u(h,j)的大小,获得目标所在距离单元值,判断准则如下:
(9)
式中:H1代表有目标假设,H0代表无目标假设,对距离像所有距离单元应用自适应判断准则,可以获取第h帧检测到的目标距离R。
2.1.2 基于MVDR角度测量的目标定位方法
通过目标距离检测获取距离R后,采用MVDR获取目标方位角[34],该方法无需获取目标额外的先验信息且能够实现对同距离不同角度目标的方位角测量。
对于均匀线阵模型,其阵元接收信号的方向向量a(θ)定义为
a(θ)=[1,e-jφ,…,e-j(K-1)φ]T,φ=(2πdsinθ)/λ
(10)
式中:φ为相邻天线间的相位差;K为阵元数;d为两阵元间距;θ为回波信号相对于法线方向的入射角;λ为信号波长。
构造了阵列接收回波方向向量后,利用MVDR波束形成算法估计目标信号到达角。MVDR波束形成中空域滤波器输出为
y(j)=wHx(j)
(11)
式中:w=[w1,w2,…,wK]T为空域滤波器的权向量;信号x(j)是空域滤波器的输入信号,也是目标所在距离单元信号。根据目标距离检测结果,可以得到目标位置处的距离单元索引j,因此空域滤波器的输入信号x(j)包含了K个通道、NT个脉冲的目标距离单元值,信号x(j)可以表示为
x(j)=[x1(j),x2(j),…,xk(j),…,xK(j)]T
(12)
xk(j)=[xk(1,j),…,xk(i,j),…,xk(NT,j)]T
(13)
式中:xk(j)表示第k个通道的NT个脉冲的目标距离单元值。
输出的平均功率P(θ)为
P(θ)=E{|y(j)|2}=
E{wHx(j)xH(j)w}=wHRw
(14)
式中:R=E{x(j)xH(j)}为空间自相关矩阵。
MVDR波束形成器的最优权向量可表示为
(15)
将式(15)代入式(14)中可以求得输出的平均功率为
(16)
在[-π,π]角度范围内改变a(θ)中θ,得到PMVDR(θ)变化曲线,然后对PMVDR(θ)曲线谱峰搜索,此时峰值点对应的θ为当前帧估计的目标方位角。
结合目标距离R及通过MVDR测角方法得到的目标方位角θ,采用坐标转换公式将雷达阵列视角下的目标坐标转换到真实场景下的坐标系中,此时目标真实的位置坐标(x,y)可计算为
(17)
式中;φ为雷达阵列方向与水平方向的夹角。因此,根据以上定位过程就可得到目标初始定位点迹。
2.2 多径假目标分析与消除
2.2.1 多径假目标位置分析
为了能够有效消除多径回波产生的假目标定位点,本节将对多径对应的假目标定位点位置进行分析。图2展示了4种电磁传播路径的理论定位点位置,其中Q11代表双程直视路径Γ11定位的位置,也是目标真实位置,坐标记为(x,y)。Q22代表双程反射路径Γ22定位的位置,也是镜像目标位置,坐标记为(m,n)。而镜像目标坐标可由目标真实位置坐标和雷达与反射面间横向距离计算得到,公式如下:

图2 4种路径理论定位位置Fig.2 Theoretical positions of four paths
(18)
根据第1.1节多径传播几何示意图,可知组合路径Γ12与Γ21的距离完全相同,且为双程直视路径Γ11距离相加双程反射路径Γ22距离的一半。但因为路径Γ12回波是以反射路径Γ2到达接收天线,其方向应等同于镜像目标Q22的到达角。而Γ21路径返回雷达时以直视路径Γ1到达接收天线,到达方向应同真实目标Q11的到达角。
因此,如图2所示,Q12代表直视路径+反射路径的组合路径Γ12定位的位置,坐标记为(m1,n1)。设Q12点相距雷达的距离为R12,Q12点的方位角θ12和Q22点方位角θ22相同。Q21代表反射路径+直视路径的组合路径Γ21定位的位置,坐标记为(x1,y1)。设Q21点相距雷达的距离为R21,Q21点方位角θ21和Q11点方位角θ11相同。将4种路径对应的定位点相距雷达距离表示如下:
(19)
根据真实目标和镜像目标的定位点坐标可以得到4种路径定位点对应的方位角如下:
(20)
因此组合路径Γ12定位点Q12的坐标(m1,n1)和组合路径Γ21定位点Q21的坐标(x1,y1)计算公式可分别表示如下:
(21)
(22)
2.2.2 多径假目标匹配消除
本文实现多径假目标消除的关键是定位点识别,以便能够保留双程直视路径Γ11的定位点Q11,消除来源于多径的定位点Q12、Q21及Q22,获取到多径假目标消除后的目标真实的定位结果,多径假目标匹配消除方法流程如图3所示。

图3 消除多径假目标方法步骤Fig.3 Multipath false target removal steps
消除多径假目标定位点的方法流程具体描述如下。
(1) 目标定位:经过第2.1节对目标进行距离检测得到目标距离,再采用MVDR测角方法可同时获取同距同角真实目标、同距不同角多径目标的方位角,之后经过坐标系转换完成目标定位,得到初始定位点迹(包含真实目标和多径假目标定位点)。可以发现,通过MVDR定位方法也能够有效区分同距不同角的多径定位点Q12和Q11,设初始定位点坐标为(x,y)。
(2) 镜像目标Q22位置计算:根据电磁波镜面反射规律即真实目标和镜像目标会关于反射表面镜面对称,再结合几何场景中雷达相距反射面的距离L,可根据每帧每个定位点(x,y)计算关于反射面对称的镜像目标坐标(m,n),计算公式同式(18)。
(3) 多径目标Q21位置计算:得到初始定位点坐标后,可以根据Q21定位点和直视路径方位角相同,距离为路径Γ11加路径Γ22距离的一半的特点计算其坐标。结合前两步得到的初始定位点坐标(x,y)和镜像目标定位点坐标(m,n),首先计算Γ21路径的距离为
(23)
然后由式(20)计算Q21定位点的方位角θ21,并根据式(22)计算得Q21位置坐标(x1,y1)。
(4) 多径目标Q12位置计算:根据Q12定位点和反射路径方位角相同,距离与路径Γ12距离相同的特点,可由式(19)~式(21),计算多径目标Q12的位置坐标。
(5) 多径匹配消除:对初始定位点按其距离从小到大排列,然后由式(24)分别计算第一个初始定位点对应的多径定位点Q21、Q12和Q22位置坐标与其他的初始定位点坐标的距离误差。若距离误差小于门限值H=1 m,则说明此时初始定位点为真实目标,保留其坐标值,而消除与真实定位点对应多径定位点Q21、Q12和Q22匹配的剩余初始定位点坐标。之后对仍留存的初始定位点重复以上识别真实定位点过程,就保留了每帧初始定位点中真实目标定位点Q11,而消除了真实目标对应的多径假目标。
由于实测中反射面为非理想平滑介质,因此镜像目标位置与理论值存在偏差。基于此,本文选取实测数据中最大误差的经验值1 m作为误差门限值H。误差计算公式如下:
(24)
3 实测实验与结果分析
3.1 实验场景
在本节中,几组实测实验结果证明了所提出的多径假目标消除方法的有效性。在实测场景中采用TI公司生产的AWR1642型号的77 GHz车载毫米波雷达,该雷达通过探测墙壁反射面旁的目标,来模拟城市道路多径环境下的目标探测。该车载毫米波雷达有2个发射天线,4个接收天线,实测试验中设置的雷达参数如表2所示。
表2 车载毫米波雷达系统参数Table 2 Automotive millimeter-wave radar parameters
3.2 实验结果分析
实验 1单目标微动实验,实验中雷达高度为1.2 m,以雷达为中心原点建立直角坐标系,雷达位置为(0,0)m。实测场景示意图如图4所示,其中反射面与雷达的横向距离L为5.3 m,雷达阵列与水平方向夹角φ为54.3°,单目标Q11在(-2.52,4.6)m处原地晃动。

图4 实验1场景示意图Fig.4 Scene diagram of Experiment 1
图5展示了MTI对消后的单目标晃动的距离像,距离像中包含了5 m处的双程直视路径Γ11,7.2 m处的相同距离的组合路径Γ12和Γ21,及9.2 m处的双程反射路径Γ22。同时可以发现,车载毫米波雷达探测该场景目标的主要回波路径为双程直视路径Γ11及组合路径Γ12和Γ21,双程反射路径Γ22存在但极其微弱,难以进行距离检测,因此需要消除的多径假目标定位点也主要来源于路径Γ12和Γ21。
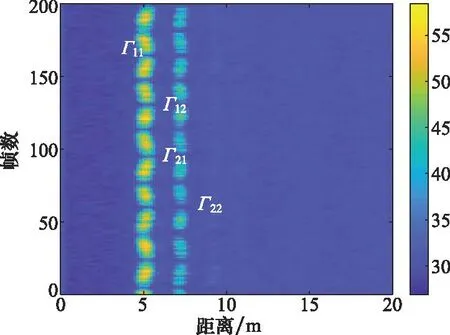
图5 实验1目标距离像Fig.5 Range profile of Experiment 1
之后采用MVDR测角算法进行定位,得到初始定位结果,如图6所示。可以发现,定位点迹包括了来自双程直视路径Γ11的定位点Q11,距离像上无法区分,而定位结果中完全分离的Γ12和Γ21路径对应的Q12和Q21定位点,再次证明了路径Γ12的定位点Q12和路径Γ21的定位点Q21具有相同距离不同角度的空间特性。其中,Q11定位点为目标真实位置,而Q12和Q21定位点为多径形成的假目标点迹,需要消除。

图6 实验1初始定位结果Fig.6 Initial localization result of Experiment 1
利用每帧初始定位点的位置坐标计算出Q12和Q21假目标定位点的理论位置,然后将假目标理论位置同实际初始定位点匹配,消除匹配到多径假目标的定位点,最终可得到多径假目标消除后的目标真实位置,如图7所示。经过多径消除后,定位结果只保留了目标真实位置点,组合路径的假目标定位点被完全消除,计算多径消除后目标的定位误差,与实际真实位置平均偏差为0.156 m,考虑人体微微晃动的状态,误差在实际应用中是完全可接受的。因此,基于MVDR测角的定位方法不仅可以实现同距不同角目标的定位,还能获得目标良好的定位效果。

图7 实验1多径假目标消除后结果Fig.7 Experiment 1 results after multi-path false target elimination
实验 2单目标运动实验,实测场景雷达位置及与反射面横向距离同实验1,单目标从(-2.52,10.5)m处向(-2.52,2.5)m位置处运动。
运动单目标距离像如图8所示,主要回波路径为双程直视路径Γ11,组合路径Γ12和Γ21。距离像中路径Γ12和Γ21所属同一条距离轨迹,经过MVDR测角时,每帧得到的方位角来源于路径Γ12或路径Γ21,最终得到初始定位后的结果如图9所示。可以发现,单目标运动时多径假目标点Q12、Q21和Q22均存在,尤其是Q21定位点迹会对真实目标定位产生干扰,需要精确消除。应用所提出的多径假目标消除方法理论计算出3类多径假目标的理论位置,并结合初始定位点进行匹配消除,得到假目标消除后的目标定位结果如图10所示。经过多径假目标匹配消除后,真实目标定位点迹得以保留,干扰假目标点迹完全滤除。
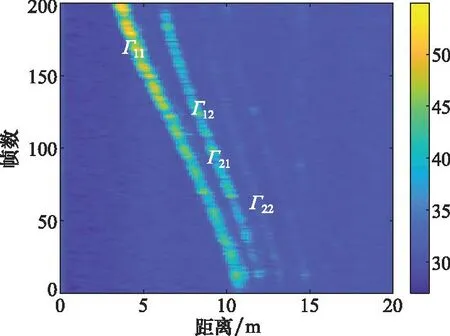
图8 实验2目标距离像Fig.8 Range profile of Experiment 2

图9 实验2初始定位结果Fig.9 Initial localization result of Experiment 2

图10 实验2多径假目标消除后结果Fig.10 Experiment 2 results after multi-path false target elimination
实验 3双目标运动实验,实测场景示意图如图11所示,目标1从(-4.92,7.50)m处向(-4.92,1.56)m位置处运动,目标2从(-2.52,1.66)m处向(-2.52,8.68)m位置处运动。

图11 实验3场景示意图Fig.11 Scene diagram of Experiment 3
实验3验证了双目标运动时的多径假目标消除方法效果,图12为实验3回波距离像,可以发现目标1的回波路径为路径Γ11、Γ12和Γ21,目标2回波路径包括路径Γ11、Γ12、Γ21和Γ22。
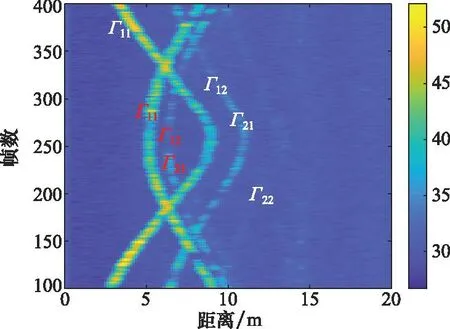
图12 实验3目标距离像Fig.12 Range profile of Experiment 3
因为两目标为相向运动,所以其距离轨迹间存在交叉重合,经过MVDR测角定位后,得到每条距离轨迹对应的初始定位点如图13所示。可以发现,初始定位结果中假目标点主要为目标1的多径定位点Q12,目标2的多径定位点Q12和Q21,假目标定位点的存在将严重影响真实目标的位置识别。因此,对初始定位结果应用多径假目标消除算法,将多径假目标理论位置同每帧定位点匹配,消除多径定位点后得到目标真实定位结果如图14所示。其中,目标1的定位点迹有少数缺失是因为在第145帧时距离像目标1的Γ11路径和目标2的Γ21路径相重叠,且目标1的真实定位点Q11和目标2的多径点Q21方位角恰巧也相同,因而目标1的定位点Q11被视作多径点消除。除此之外,由图14可以发现,图13中的多径假目标均被消除,两目标真实运动轨迹得以显现。因此,通过3组实测实验证明了多径假目标消除方法应对运动单目标、多目标定位的有效性。

图13 实验3初始定位结果Fig.13 Initial localization result of Experiment 3

图14 实验3多径假目标消除后结果Fig.14 Experiment 3 results after multi-path false target elimination
4 结 论
本文对城市道路多径环境下车载毫米波雷达探测目标时产生的多径假目标位置进行理论分析,提出了一种多径假目标匹配消除方法。该方法首先建立了电磁多径传播回波模型,然后将雷达回波经过脉冲压缩、MTI滤波、非相干叠加、CA-CFAR检测等步骤得到目标的距离,再采用MVDR角估计方法计算目标初始定位结果。最后,结合初始定位点迹计算理论多径假目标位置并进行匹配消除,保留了初始定位点迹中的真实目标。采用车载毫米波雷达进行实测验证,结果表明,所提方法能够消除多径假目标,得到真实目标准确的定位结果。
