老年驾驶人的应激操作反应特性分析
2024-01-05刘玉然郭凤香蔡晶周怡雯陈瑶
刘玉然, 郭凤香*, 蔡晶, 周怡雯, 陈瑶
(1.昆明理工大学交通工程学院, 昆明 650500; 2.云南省交通科学研究院有限公司, 昆明 650200)
截至2021年底,中国65岁及以上的人口数达2亿,占总人口的14.2%[1]。根据预测,到2025年“十四五”结束阶段,中国60岁及以上老年人口将达到3.04亿,占总人口的21.6%[2]。人口老龄化不仅让经济发展与医疗保障承受巨大压力,交通运输体系也面临着老年人适应性及安全性的挑战[3-4]。由于老年人寿命的延长以及他们对自驾出行需求的增加,相比过去几十年,现代老年人驾驶时间更长[5]。然而,随着年龄的增长,身体的衰老与认知能力的下降,老年人的驾驶能力会受到影响[6]。相关交通事故结果分析表明,事故发生的风险随年龄的增长而变大,且事故主要发生于情景复杂的交通环境[7]。由于交叉口处车流量相对较大,且存在机动车、非机动车、行人交织的情况,交通环境较复杂,老年驾驶人需要处理的信息较多,加上老年驾驶人的视觉搜索范围会随着车辆增多逐渐缩小,使其容易忽略来往车辆,从而出现行为差错,导致交通拥堵乃至交通事故。因此,对老年驾驶人应对风险的应激反应进行研究,对降低其事故发生率具有必要性。
目前,中外已有较多对驾驶人特性的研究。Singh等[8]分析了日常驾驶条件下驾驶人的行为特征,发现驾驶人的视野、反应时间和控制车辆的能力随着年龄的增长而下降,但是与年轻驾驶人相比,年龄较大的驾驶人往往驾驶更安全。Lee等[9]探讨了环境特征对韩国老年驾驶人事故伤害严重程度的影响。结果表明,由于老年驾驶人感知能力的衰退,在复杂驾驶环境下往往需要更长的反应时间,相比于中青年驾驶人更容易发生严重的交通事故。Chen等[10]通过聚类算法,对驾驶人的驾驶风格和技能进行风险评估,提出了一种基于驾驶风格和驾驶技能聚类的特征选择方法,得出驾驶人的驾驶风格和驾驶技能对交通安全、通行能力和效率有着重要的影响。吕贞等[11]对比分析平曲线段交通标志设置类型对驾驶人视觉特性的影响。结果表明,在公路平线段设置线形诱导标或线形诱导标 + 减速带能对驾驶人起到较好的引导与警示作用。王博文等[12]提出了一种基于SMOTENC软件和极端梯度提升的驾驶人交通状态优劣分类算法,得出随着驾驶经验的增长,驾驶人发生交通事故的概率先升后降,说明老年驾驶人可能因视力状况、反应速度、认知能力等方面存在不适合继续驾驶的情况。牛增良等[13]通过驾驶模拟实验发现,随着试验车速的增大或应激反应距离的减小,驾驶人的心率增长率会变大,心率变异性低频值(low frequency value of heart rate variability)会减小。
综上所述,国外对于老年驾驶人操作行为反应的研究相对较早,但随着老年驾驶人的驾驶出行成为热点研究问题,国内对老年驾驶人的驾驶风险研判与驾驶安全提升等方面的研究越来越多,但针对老年驾驶人在特定风险场景的临界状态下应激操作行为的研究依然较少,且不够深入,因此,现基于驾驶模拟器进行不同风险场景的驾驶模拟实验,分析不同年龄阶段驾驶人在临界状态下的反应差异性,以期为制定针对老年驾驶人的驾驶培训计划、交通安全政策以及车辆技术改进等方面提供重要的参考,促进老年驾驶人的安全驾驶和道路交通的整体安全性。
1 驾驶模拟试验
1.1 虚拟场景构建
本次试验应用昆明理工大学交通工程学院开发的虚拟场景设计软件VS-Design进行模拟试验场景搭建。根据城市交叉口中经常出现交通冲突的风险情境的调查结果,设计了5类不同交通风险的交叉口场景。无信控交叉口由于没有信号灯控制,存在较多冲突风险,驾驶人的主观决策行为,直接影响着无信控交叉口的运行情况,驾驶人必须自主判断进入交叉口的安全时刻,寻求在交通流中进入交叉口的安全机会,使车辆安全、快速地通过交叉口[14]。因此,试验设计的5个风险场景均为城市道路的无信号控制交叉口,试验场景的设计图如图1所示,分类及描述如表1所示。其中,场景1为机动车与行人冲突的风险场景,场景2与场景3为机动车与非机动车冲突的风险场景,场景4和场景5为机动车与机动车冲突的风险场景。

表1 风险驾驶场景描述及分类Table 1 Description and classification of risk driving scenarios

图1 风险驾驶各实验路段场景示意图Fig.1 Scenarios of each experimental road section of risky driving
1.2 模拟场景风险等级划分
将模拟驾驶情境中所存在风险的严重程度定义为“模拟场景风险等级”,并以此来对试验中不同的场景进行排序划分,风险驾驶场景的等级越高说明该场景中所存在的风险越大,对驾驶人安全驾驶的影响也就越大。通过量化计算的方法划分驾驶场景的风险等级,并基于驾驶模拟器的实时操作数据分析得到的冲突风险程度结果和驾驶人对风险场景的主观感受问卷调查结果进行计算调整,进一步得到有效的风险驾驶场景等级[15]。定义风险驾驶场景的等级值为RLS(risk level of scenario),第i个场景中由模拟器数据计算出的冲突程度结果为Qi,第i个场景中驾驶人主观感受为Yi,计算公式为
RLSi=QiYi
(1)
通过计算得到的模拟风险驾驶等级如表2所示。

表2 模拟风险驾驶场景等级表Table 2 Rating of simulated risk driving scenarios
1.3 试验设备
本次试验所用的KMRTDS驾驶模拟系统如图2所示,该驾驶模拟系统是昆明理工大学道路交通模拟实验室开发的由“人-车-路-环境”构成的驾驶模拟系统,总体上由驾驶系统、显示系统和控制台组成[16],研究人员可在搭建好的场景的基础上,设置模拟车辆、交通量等参数以及道路风险等其他环境因素,实现对道路交通系统中各参数的采集和分析。
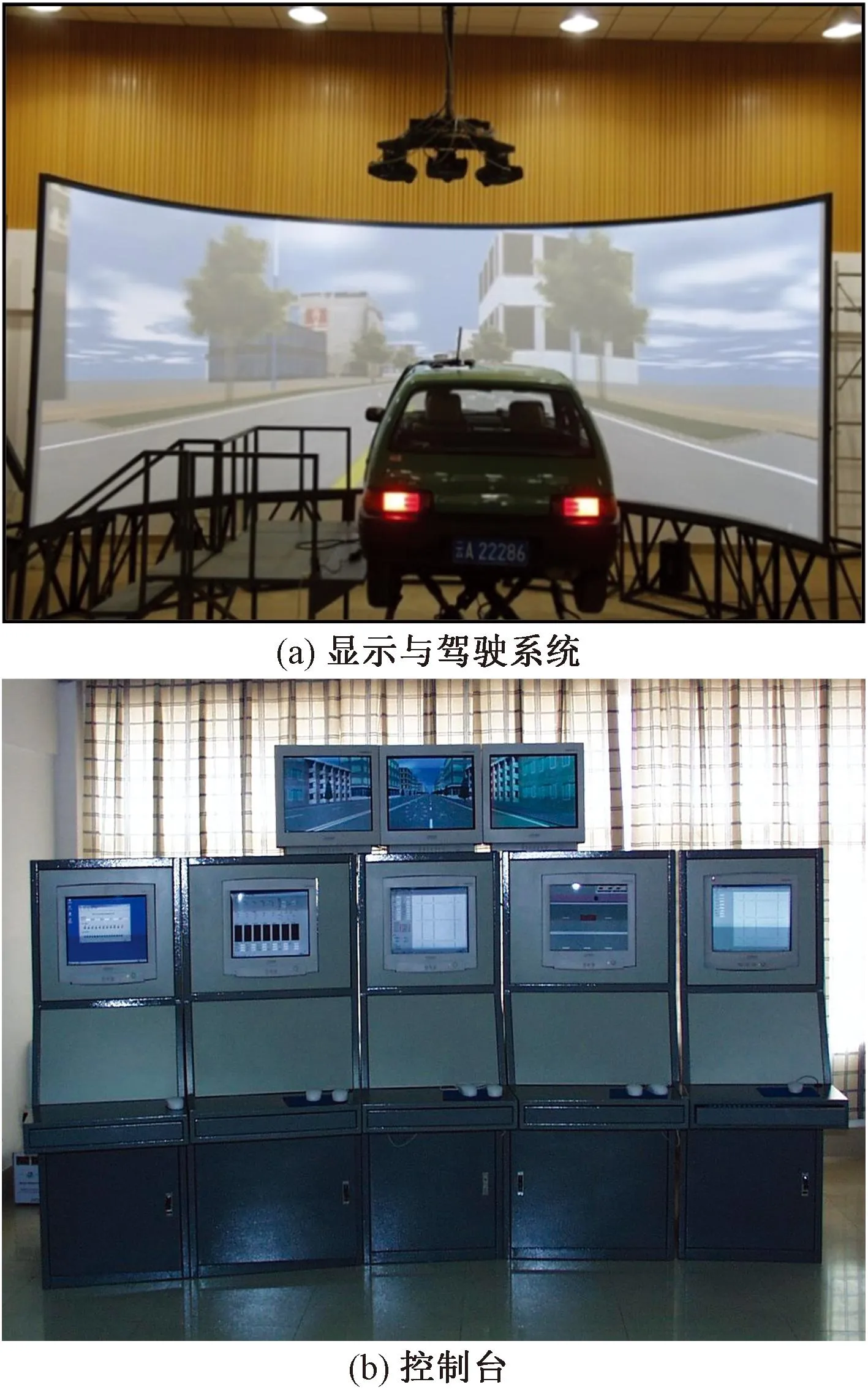
图2 KMRTDS驾驶模拟系统Fig.2 KMRTDS Driving Simulation System
在为避免驾龄及驾驶经验等客观因素会对试验结果造成影响,本次试验选取驾驶人的标准为满足驾龄在3年以上且同时具有1万km以上实际驾驶里程的39名熟练驾驶人,并根据实验完整度对完成模拟驾驶实验的受试者进行筛选,选出实验数据完整的中青年受试者和老年受试者各15名,共计30名进行数据提取工作。
在正式实验前,检查模拟驾驶系统各部分是否工况良好,启动各功能模块,并检查各部分传感器的工作状况与数据传输情况,以保证数据采集的同步性和连续性。对受试者进行简单试验介绍与说明,让其熟悉驾驶模拟器的方向盘控制以及离合器与制动踏板的踩踏程度,并提示受试者保持40 km/h的驾驶速度。试验中将采集驾驶人的速度、加速度、制动距离等行车数据。
2 驾驶人应激反应特性分析
2.1 应激反应时间分析
Nguyen等[17]研究表明,在复杂的道路状况下,反应时间与老年人的驾驶行为密切相关。因此,在驾驶模拟试验中,反应时间可作为表征驾驶操作的重要指标。5种风险情境下两组驾驶人的反应时间均值如表3所示,可以看出,相较于中青年驾驶人而言,老年驾驶人的反应时间更长,在临界状态下老年驾驶人的反应更慢。但是两组驾驶人的数据没有体现出明显的差异性,因此,为了分析反应时间的稳定度,选择S-P-T表法(student-problem-time table method)进一步分析研究驾驶人临界状态下的反应时间。

表3 两组驾驶人的反应时间的对比分析Table 3 Comparative analysis of reaction time of two groups of drivers
表4为S-P-T矩阵表,其中n为试验风险总数,Si为第i个受试者,Pj为第j个风险场景,Tij为第i个受试者经过第j个风险时的反应时间,得到受试者反应时间矩阵[Tij]。对反应时间表进行转化,如表5所示,[Tij]矩阵进行重新排序,并根据各风险场景反应时间T·j大小,将Pj中T·j最大的放在最左边,并以此类推,顺序排定Pj·,然后根据各受试者反应时间Ti·的大小,将Si中Ti·最大的排在最上面,并以此类推,顺序排定Si。然后在重新排序的Pj和Si的顺序下,填入相应的Tij值。

表4 S-P-T矩阵表Table 4 S-P-T matrix
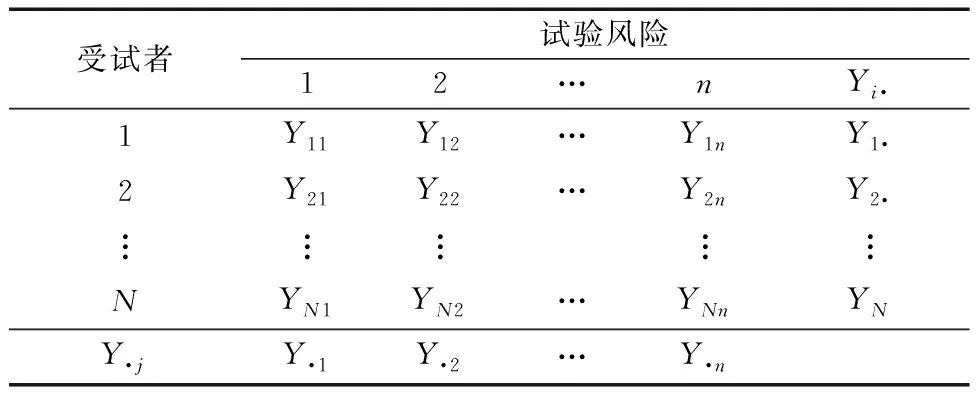
表5 S-P-T矩阵转化表Table 5 S-P-T Matrix Conversion Table
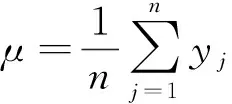
将两组受试者对应各风险场景的反应时间分别代入S-P-T计算式当中,结果如表6所示,通过yi·的值,对下标满足j=yi·对应的yij项右侧画竖杠,并将添加的竖杠相连,得到S-P-T表中的ST曲线。由Guttman理论[18]提出,S-P-T表中可以通过ST曲线观测受试者反应时间的稳定度。如果曲线两侧都有“1”时,说明反应时间不稳定。若“1”集中于左侧,则相对稳定,集中在右侧则反之亦然。

表6 中青年驾驶人与老年驾驶人的S-P-T矩阵表Table 6 S-P-T matrix of young and middle-aged drivers and elderly drivers
由表6可以看出,反应时间稳定的受试者2、3均为青年受试者,且在中青年驾驶人的表中极少“1”出现在上侧,但在老年驾驶人中19、34、36、37均表现出了相对不稳定的反应时间,直观上看中青年受试者较老年受试者的表现要更加稳定,同时S-P-T表的稳定程度是可以通过定量分析得到的,令
(2)
反应时间稳定度RSTi定义为

(3)
式中:yi为受试者反应时间模式;受试者i反应时间模式与总体反应时间模式即yij,其中j=1,2,…,n;y·j为总体反应时间模式即。
假设在S-P-T表中“1”值都在ST曲线左边即被认为是完美反应时间模式,当“1”不在ST曲线上侧时,可以假设将“1”挪至曲线上侧,同时为保证原S-P-T表分布不变,将被移动的“1”值也相应进行调整,使得结果中y·j和yi·值不变。整理后可得
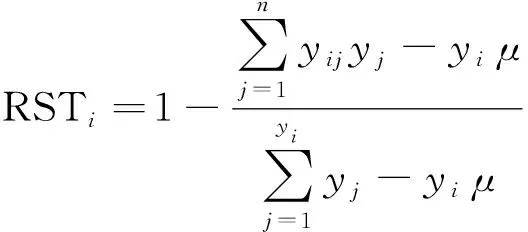
(4)
如图3所示,根据反应时间稳定度RSTi计算步骤进行计算,可以得到每个驾驶人各自的RST值,并且按照两类驾驶人的组别统计分析反应时间稳定度的差异性。通过对比分析,老年驾驶人的RST均值比中青年驾驶人多0.23 s,说明中青年驾驶人在试验中面对风险的反应情况较老年受试者更稳定,且中青年受试者和老年受试者的反应稳定度间差异性显著(F=13.21,p=0.00)。

图3 中青年受试者和老年受试者反应时间稳定度对比图Fig.3 Comparison of reaction time stability between young and middle-aged subjects and elderly subjects
2.2 应激制动反应特性分析
驾驶人操纵车辆行驶过程中,如果道路环境中出现突发状况,驾驶人会感到紧张,进而影响驾驶人的驾驶行为,尤其是当驾驶人试图克服危险情况时,可能会采取紧急制动操作,避免车辆发生意外情况[19],因此,制动距离可以客观地反映驾驶人规避风险的情况,对驾驶人在应激状态下的制动操作进行分析,从而探讨不同年龄段驾驶人的差异。
2.2.1 制动强度分类
驾驶人通过踩踏制动踏板对车辆进行制动操作时,制动踏板位移和制动踏板力是对制动系统主动输入的信号,由制动踏板位移可以得到驾驶人制动踏板的踩踏速度及踩踏加速度等参数。有研究表明在不同工况下的制动踏板压强和制动踏板位移存在较强相关性,制动强度可以由制动踏板位移来得到。因此,相比制动力,制动踏板位移具有波动范围更小、更适应车辆反应滞后性的特点。基于驾驶模拟实验,选取制动踏板位移L作为评判制动强度的参数。驾驶人临界反应时踩踏的制动踏板行程如表7所示,将制动强度分为全制动、强制动和弱制动3类。

表7 制动强度及特征Table 7 Braking strength and characteristics
对于不同风险等级的场景,多数驾驶人可以在较平和的状态下从容地保证车辆的安全性和平稳性,并进行制动。随着驾驶风险驾驶场景等级的升高,在临界状态下进行全制动的人数呈规律性递增。在风险驾驶场景等级最高的两个模拟场景的结果中,较多的人采取弱制动,数据分析结果表明,部分驾驶人车速较低可以规避风险,还存在多数老年驾驶人未进行减速来不及制动的情况。为了更加清晰地对比老年驾驶人和中青年驾驶人在临界状态下的制动情况,通过对两组驾驶人制动踏板行程最大值和均值的计算,计算结果如图4和图5所示。

图4 风险场景下驾驶人制动踏板行程均值Fig.4 Average value of driver’s brake pedal stroke under risk scenario

图5 风险场景下驾驶人制动踏板行程最大值Fig.5 Maximum value of driver’s brake pedal stroke in risk scenario
通过分析对比,两组驾驶人随着风险驾驶场景等级的升高采取了不同的制动方式,在RLS较低的三个场景中,通过制动踏板行程的最大值和均值体现中青年驾驶人都保持着制动踏板行程的最小值,用较短时间控制车辆速度在安全行驶范围,从容地控制车辆保持平稳车速规避风险。而老年驾驶人由于风险感知的敏感性及对风险感知较为延后等原因则采取了较大程度的制动,从制动踏板行程最大值可以看出,一些老年驾驶人在较低风险等级的临界制动操作采取了全制动,老年驾驶人在风险前的临界反应体现了较低的安全性。
场景3与场景5的风险驾驶场景等级较高,分别为1.3与0.74,在风险出现时留给驾驶人进行临界反应操作的空间和时间都很小,通过制动踏板行程的最大值可以看出,中青年驾驶人和老年驾驶人中均有受试者做出最优的制动操作,老年驾驶人群体中有受试者可以通过临界制动反应高质量地规避风险。但通过两组受试者制动踏板行程的均值来分析驾驶人临界制动反应的综合情况,体现在两个高风险场景中的结果是中青年驾驶人远高于老年驾驶人。中青年驾驶人在临界制动反应中可以保持高度的风险敏感性及时利用制动操作来控制车辆降速,老年驾驶人则多数人来不及充分进行制动操作,甚至有受试者未及时对风险反应从而没有制动操作,造成了事故的发生。
2.2.2 制动距离分析
在不同风险等级的驾驶场景中,驾驶人在获取风险信息后处于临界状态时,进行紧急制动是为了在与风险碰撞前以最短的时间降低车速,与冲突保持安全距离。驾驶人在临界状态下,制动距离也可以客观地反映驾驶人规避风险的情况,分别在各等级场景下,对驾驶人的制动距离与年龄进行相关性分析,具体的函数表达式如表8所示。

表8 驾驶人的制动距离与年龄函数关系Table 8 Functional relationship between braking distance and age of drivers
由上述5个场景的相关性分析结果可知,在风险较小的场景1、2、4中,随着驾驶人年龄的增加,制动距离均呈上升趋势,即老年驾驶人的临界制动过程较中青年驾驶人长,年龄越大,其制动距离越长,规避风险的过程变长导致事故出现的可能性增大。但是,通过实验结果分析可知,在模拟场景风险等级较低的几个实验场景中,老年驾驶人的完成度均较好。在反应情况及制动操作均不及中青年驾驶人的情况下,极少有碰撞事故发生,说明老年驾驶人在时间及空间充裕的情况下,在临界状态中有足够的风险规避能力。在场景3和5两个模拟场景风险等级较高的实验场景中,制动距离随年龄的增加反向增长。综合分析试验结果发现,这种情况不完全是驾驶人制动造成的结果,在高风险的场景下,老年组中有极大比例的驾驶人在制动过程中与风险目标发生碰撞而被迫终止制动,还有部分老年驾驶人由于感知或反应等方面的问题不能及时采取制动措施。
2.3 纵向加速度特性分析
纵向加速度是描述车辆运动行为的重要参数[20],车辆行驶在道路上,驾驶人感知到风险的发生,从而做出速度选择,决定是否进行加减速,最终影响车辆在道路上行驶的数据。各场景受试者加速度如图6所示,在风险驾驶场景等级值为0.1、0.38与0.3的场景中,两类驾驶人在直线行驶阶段均保持匀速行驶,加速度基本为0,当风险出现时,中青年驾驶人相比老年驾驶人,提前进行制动减速,而老年人是当风险出现时才采取的紧急制动,尤其在场景4中,老年驾驶人在0.48 s内纵向的加速度就从0 m/s2降到-5.8 m/s2,故纵向加速度的波动幅度很大,增加了事故发生的概率。在风险驾驶场景等级值为1.3与0.74的高风险场景中,中青年驾驶人在感知到交通环境的变化后采取了2次制动操作降低车速,从而保证行车安全;而老年人对于风险的感知不够敏感且制动时间较晚,当出现风险时紧急制动,减速度瞬间达到最大值,增加了事故发生的概率。

图6 受试者纵向加速度Fig.6 Longitudinal acceleration of subjects
综上分析所述,相较于中青年驾驶人,在视野开阔,周围障碍物较少的风险情境下,老年驾驶人虽没造成交通事故,但较慢的反应时间已经增加了碰撞风险;在周围停满车辆,行人较为密集的居民住宅区路段,视野受到遮挡,场景复杂且风险最高,在此场景下30名受试者中有14名驾驶人与突然出现的自行车相碰撞,占所有受试者的比例为46.67%,其中,中青年驾驶人4名(13.3%),老年驾驶人10名(33.3%),发生碰撞的驾驶人均在临近事故发生前未提前采取减速措施。
3 结论
以中青年和老年驾驶人为研究对象,基于驾驶模拟试验,在保证驾驶安全的同时对比分析了两类驾驶人在城市交叉口不同风险条件下的应激反应情况,得出如下结论。
(1)采用 S-P-T表方法分别对老年驾驶人和中青年驾驶人在临界状态下操作行为的反应时间进行稳定性及差异性分析,发现老年驾驶人在试验中面对风险的反应情况较中青年驾驶人更不稳定,且中青年和老年驾驶人的反应稳定度间差异性显著。
(2)由驾驶人制动踏板行程的均值与最大值的分析结果可知,中青年驾驶人始终保持着较小的制动踏板行程,用较短时间控制车辆保持平稳车速规避风险,而老年驾驶人由于风险感知能力的衰退采取了较大程度的制动,老年驾驶人在风险前的临界反应也体现了较低的安全性。
(3)通过选取风险触发后10 s的纵向减速度数据分析两组驾驶人操作特征的区别,发现中青年驾驶人在应对风险的临界反应更为从容,而老年驾驶人临界状态下的减速幅度更大,发生事故的概率也明显增高。
