侧滑角对大长细比鸭式布局弹箭俯仰操纵性的影响
2024-01-05陈少松徐一航浦钰文
孙 宁,陈少松,徐一航,魏 恺,浦钰文
(南京理工大学 能源与动力工程学院,江苏 南京 210094)
单鸭舵鸭式布局弹箭的法向和俯仰控制与“+”字布局弹箭类似,其在低法向机动过载条件下依然能满足飞行控制要求,且由于少了两片舵,全弹的阻力降低、升阻比提高[1,2]。而在侧向控制上,单鸭舵的鸭式布局弹箭可利用合升力的侧向分量进行转弯控制,即倾斜转弯(BTT)控制[3]。
大长径比鸭式布局制导弹箭进行BTT控制时,受侧滑角、攻角和滚转角的影响,鸭舵产生的斜吹洗流会使尾翼和弹身处于不对称的洗流当中,导致尾翼和弹身产生额外的面外力和力矩[4],进而影响俯仰控制的操纵性和稳定性。对于鸭式布局制导弹箭,最关心的是俯仰控制特性、法向过载能力和阻力特性。BTT控制往往多用于大展弦比弹翼飞行器的飞行控制,理想的BTT控制需要尽量保证侧滑角为0°[5,6],而大长径比鸭式布局制导弹箭采用BTT控制方式是一种全新的弹道飞行控制方式,与之相关的气动特性研究较少。
郭向向等[7]和郝璐等[8]分别针对大翼面鸭式布局火箭弹的气动机理、鸭舵下洗对尾翼的耦合作用进行了数值模拟研究。纪秀玲等[9]对带有侧滑角的非圆截面、面对称巡飞弹的气动特性进行了研究,得出了小侧滑角下的气动力的变化规律。杨秋澄等[10]以小迎角、小侧滑角和普通超音速的旋转弹翼式导弹为研究对象,根据空气动力学中的细长体理论,分析了弹翼引起的气动扰动对气动负荷的影响。吴军飞等[11]对鸭式布局弹箭滚转控制时的侧向气动特性进行了实验研究,分析了侧向力、偏航力矩随攻角、滚转角的变化规律,表明由鸭舵下洗产生的侧向力和偏航力矩也是造成弹箭侧偏的主要原因之一。周欲晓等[12]通过风洞试验,研究了在侧滑角非零情况下,大迎角细长体模型的横向力和横向力矩的分布规律。
上述研究对象多为小长径比、大展弦比弹翼飞行器或四片鸭舵的大长径比鸭式布局制导弹箭。为此,本文针对大长径比鸭式布局制导弹箭,通过对侧滑角为零时的气动特性的变化规律进行计算,研究侧滑角和攻角耦合条件下的气动特性,分析其对大长径比鸭式布局弹箭制导控制的影响。
1 计算模型与数值方法
1.1 几何模型与网格划分
本文计算模型为如图1所示的鸭式布局弹箭,两片舵翼呈“一”字型分布,弹尾六片尾翼相隔60°对称放置,且有两个对称的尾翼水平放置。
计算模型弹径为d,全弹长L为25.7d,圆锥弹头长径比2.3,弹身长20.8d,尾翼根弦长1.5d,翼展1.02d,前缘后掠角30°,鸭舵根弦长0.62d,翼展0.71d,前缘后掠角40°,后缘前掠角10°。选取参考长度Lref=L,参考面积Sref为直径d对应的横截面积,参考质心距离尖头10.8倍弹径处。
对计算模型及其外流场进行六面体-多面体网格划分,计算域前、后场均采用10倍弹长,边界层第一层高度满足壁面y+≤1。弹体模型表面网格如图2所示。
图2 弹箭表面网格Fig.2 Surface mesh of the projectile
本文采用三套网格进行网格的无关性验证,网格数量分别为分别为300万、520万和600万网格。俯仰力矩系数是衡量弹箭操纵性的重要参考指标,以此作为验证指标。计算工况为来流马赫数Ma=1.2、攻角α=6°、舵偏角δ=5°、侧滑角β=8°。计算结果如表1所示,表中N为网格数量,Cmz为俯仰力矩系数,η为以600万网格为基准的计算误差。从表中结果可以看出520万网格数俯仰力矩系数的结果与600万相差很小,考虑到计算时间与计算资源,选用520万网格计算比较合适。
表1 网格无关性验证Table 1 Mesh independence verification
1.2 控制方程和湍流模型
本文流场控制方法采用三维可压缩雷诺平均的N-S方程。
(1)
式中:Ω为三维控制体,∂Ω为控制体的边界曲面,Fc为对流通量,Fv为黏性通量,W为守恒变量,t为时间,s为面积。
湍流模型采用单方程的S-A方程,计算量相对较小。将控制方程与湍流模型联立进行耦合求解,空间离散格式采用基于格点格式的AUSM和通量分裂混合逆风格式,主要考虑AUSM格式比较适宜高速流动的情形,而通量分裂格式对包含激波等强间断现象的流场具有较高的分辨率。因此,将二者通过构造压力探测器结合,在压力梯度变化较大的区域用Vanleer通量分裂格式。为了提高计算精度与计算效率,采用常用的多步龙格-库塔法的双时间步法,具有良好的稳定性与较高的计算效率[13]。
1.3 数值模拟可信度验证
为了验证本文数值模拟方法的准确性,利用实验室现有条件进行了风洞实验。由于风洞尺寸的限制,实验模型的长径比为10.69,外形尺寸如图3所示。实验模型弹径d1为24.67 mm,船尾处直径为0.915d1,全长L1为10.69d1,圆锥弹头长径比为2.44。图4为风洞实验模型安装示意图。
图3 实验模型的外形示意图Fig.3 Schematic of the test model
实验风洞为直流下吹暂冲式闭口高速风洞,其实验段长600 mm,实验段横截面积300×300 mm2,攻角α的可调节范围为-3°~+15°。数值计算外场边界条件与风洞实验段工况一致:α为-2°~10°,Ma为2.5,δ为0°与10°,β为3°。
数值模拟结果与实验数据对比结果如图5~图7所示。图中,CN为法向力系数,CA为轴向力系数,CZ为侧向力系数,三者的仿真结果趋势和风洞实验值基本一致。

图5 β=3°时CN对比Fig.5 Comparison of CN when β=3°
从图5中可以看出,法向力系数CN的实验值与计算结果误差很小,均随着攻角的增大而近似线性增大。从图6的轴向力矩系数对比可以看出,计算值与实验值的变化趋势大致相同,两者误差约为4%。图7为侧向力矩系数对比图,舵偏角为0°仿真结果与实验值曲线吻合度较高;舵偏角为10°时两者最大误差6.8%左右。
图6 β=3°时CA对比Fig.6 Comparison of CA when β=3°
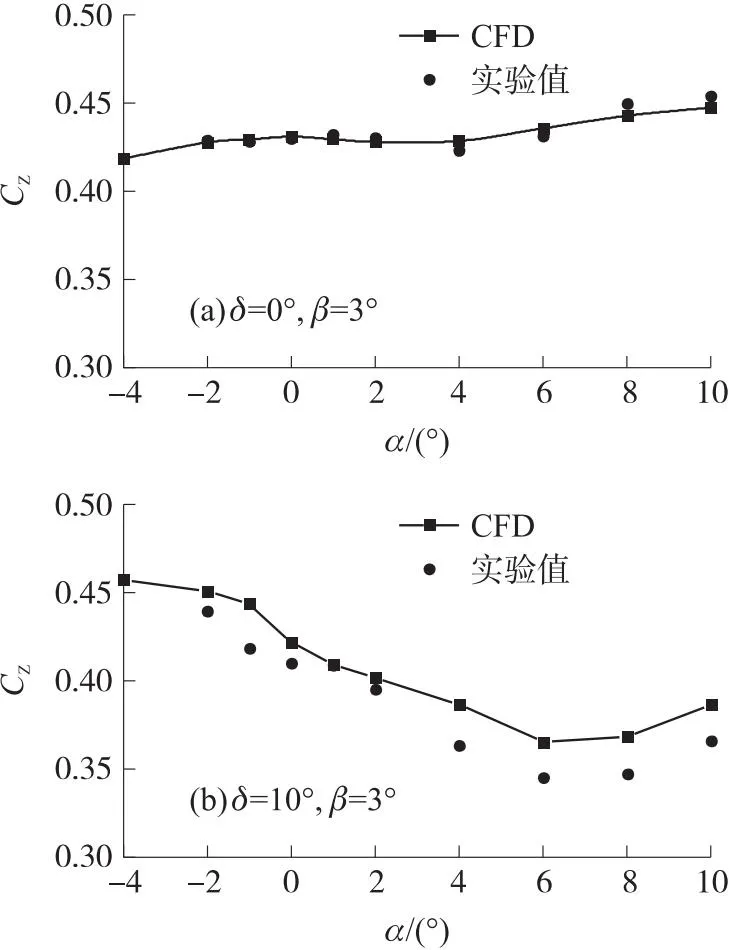
图7 β=3°时CZ对比Fig.7 Comparison of CZ when β=3°
图8为实验模型在Ma=2.5,α=0°时,风洞实验纹影与仿真结果的压力云图对比,其中上部为风洞实验纹影图,下部为计算压力云图。从图中可以看出:激波、膨胀波和压力图的位置二者基本一致;受实验模型尾部安装的气动天平的影响,尾部流场与数值计算结果有所差异。

图8 风洞实验的纹影与数值模拟对比图Fig.8 Comparison between schlieren in wind tunnel experiments and numerical simulation
综上可知,文本采用的数值计算方法可靠。
2 数值计算结果分析
由于侧滑引起的洗流主要对尾翼产生影响,但鸭式布局制导弹箭大都采用自由旋转尾翼,因此洗流对尾翼滚转力矩的影响可以忽略,只需重点分析侧滑角、攻角等的变化规律对弹箭俯仰力矩特性、升力特性和侧向力特性的影响。
2.1 侧滑角为零时弹箭的气动特性
图9为β=0°时,俯仰舵偏和马赫数对弹箭升力系数的影响。俯仰力矩系数与舵偏角、攻角和马赫的关系如图10和图11所示。

图9 β=0°时CL曲线Fig.9 Curve of CL when β=0°

图11 δ=10°,β=0°时Cmz曲线Fig.11 Variation of Cmz when δ=10°and β=0°
从图9中可以看出在侧滑角为0°、舵偏角一定的条件下,升力系数随着攻角的增加而增加;升力系数在Ma为0.4~0.8时基本不变,在Ma为0.8~1.2时随马赫数的增大而增大,在Ma为1.2以上时随马赫数的增大而减小;并且在0°侧滑角、马赫数一定的条件下,升力系数随着舵偏角的增大呈现小幅上升趋势。
通过观察图10和图11可知,在侧滑角为0°、马赫数一定的条件下,俯仰力矩系数随着舵偏角的增加逐渐增加,并且在0°攻角时俯仰力矩系数在零以上;而在舵偏角相同的情况下,俯仰力矩系数随着攻角的增大而减小,且马赫数越大其下降幅度越小,说明弹箭在攻角增大时产生稳定力矩。
表2给出了β=0°、δ=5°时马赫数与侧向力系数,从表中数据可以看出,在无侧滑时弹箭的侧向力系数基本为零,说明侧滑角为零时弹箭无斜吹。
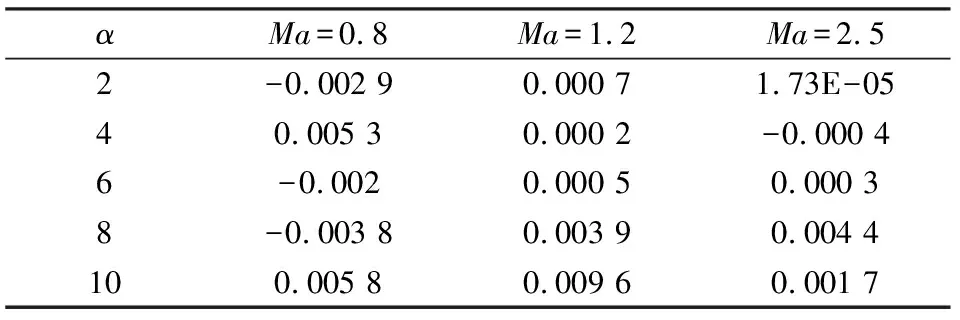
表2 侧向力系数与马赫数的关系(β=0°,δ=5°)Table 2 Relationship of CL and Ma(β=0°,δ=5°)
2.2 侧滑角对弹箭气动特性的影响
2.2.1 全弹气动特性分析
图12~图15分别展示不同马赫数、不同舵偏角、不同侧滑角下的俯仰力矩系数曲线及升力系数曲线。对比图12和图13可以看出弹箭的俯仰力矩系数在Ma为1.2时随攻角的增加而减小,且随着侧滑角的增加逐渐减小;弹箭的俯仰力矩系数在舵偏角为零、小攻角处,受侧滑角的影响较小,但在α>6°时出现了大幅度的下降。而在10°舵偏角的情况下,俯仰力矩系数随攻角的增大下降幅度更为明显。在Ma=3.0时弹箭的俯仰力矩系数整体减小,4°侧滑角的俯仰力矩系数仍在侧滑为零时的下方,但在8°侧滑时俯仰力矩系数却在侧滑为零时的上方。
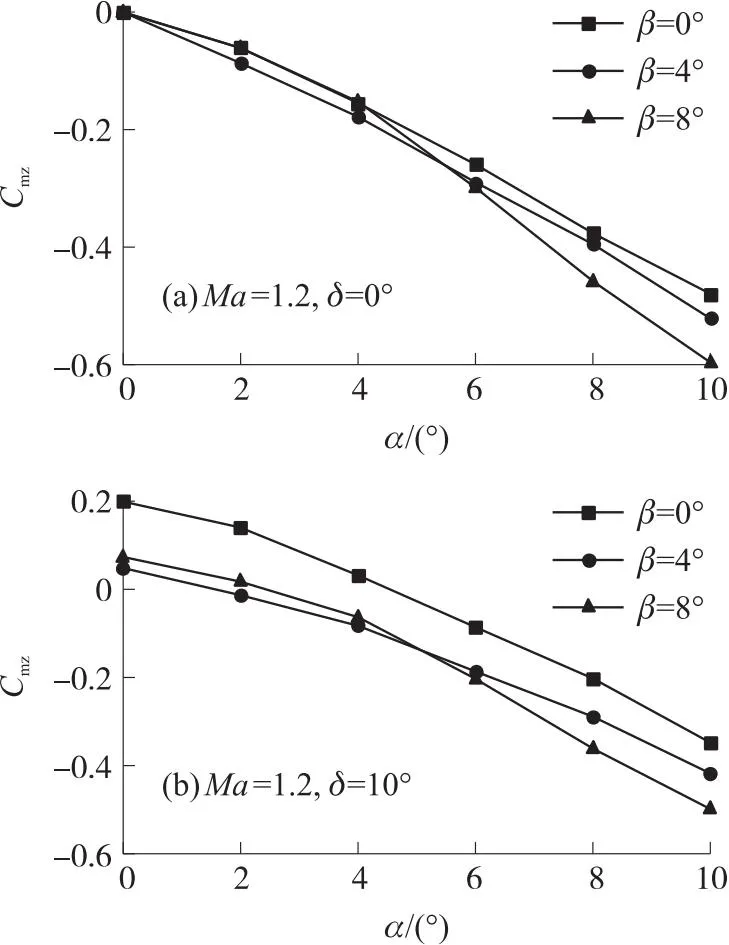
图12 Ma=1.2时Cmz对比曲线Fig.12 Comparison curve of Cmzwhen Ma=1.2
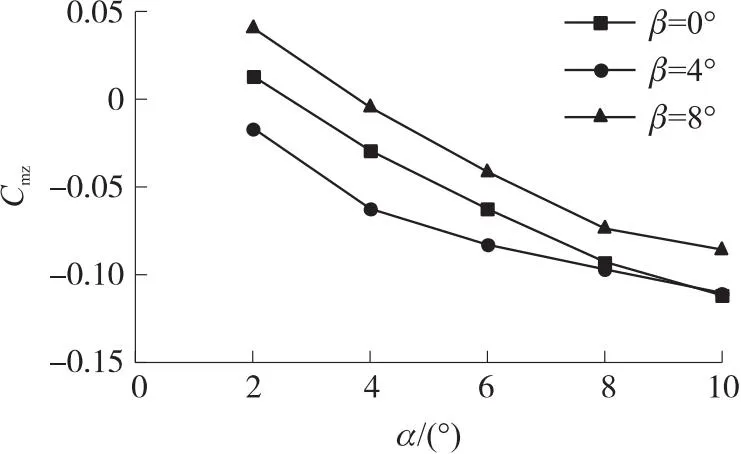
图13 Ma=3.0,δ=5°时Cmz对比曲线Fig.13 Comparison curve of Cmz whenMa=3.0 and δ=5°
由图14和图15发现随着侧滑角的增加弹箭的升力系数得到了一定的增加。舵偏角为零时,侧滑角不为零时的升力系数比0°侧滑大,并且随攻角的增大升力系数增加的越明显;而在10°舵偏角时随侧滑角的增大升力系数增加都较明显。

图14 δ=0°时CL对比Fig.14 Comparison of CL when δ=0°

图15 δ=10°时CL对比Fig.15 Comparison of CL when δ=10°
图16给出了10°俯仰舵偏角下全弹侧向力系数的变化曲线。可以看出侧滑为零时弹箭的侧向力系数基本为零;4°侧滑时侧向力系数有所增加,方向为正,随攻角的增加先减小再增大;8°侧滑时侧向力系数进一步增大,方向也为正,Ma为1.2时随攻角的增大其值上下略有波动整体上没变化,而Ma为3.0时在6°~10°攻角有大幅度的增加。

图16 δ=10°时CZ对比Fig.16 Comparison of CZ when δ=10°
2.2.2 弹箭的流场分析
图17是Ma为3.0、5°舵偏角和4°攻角工况下侧滑角对弹箭XOZ平面的流线与涡量的影响。
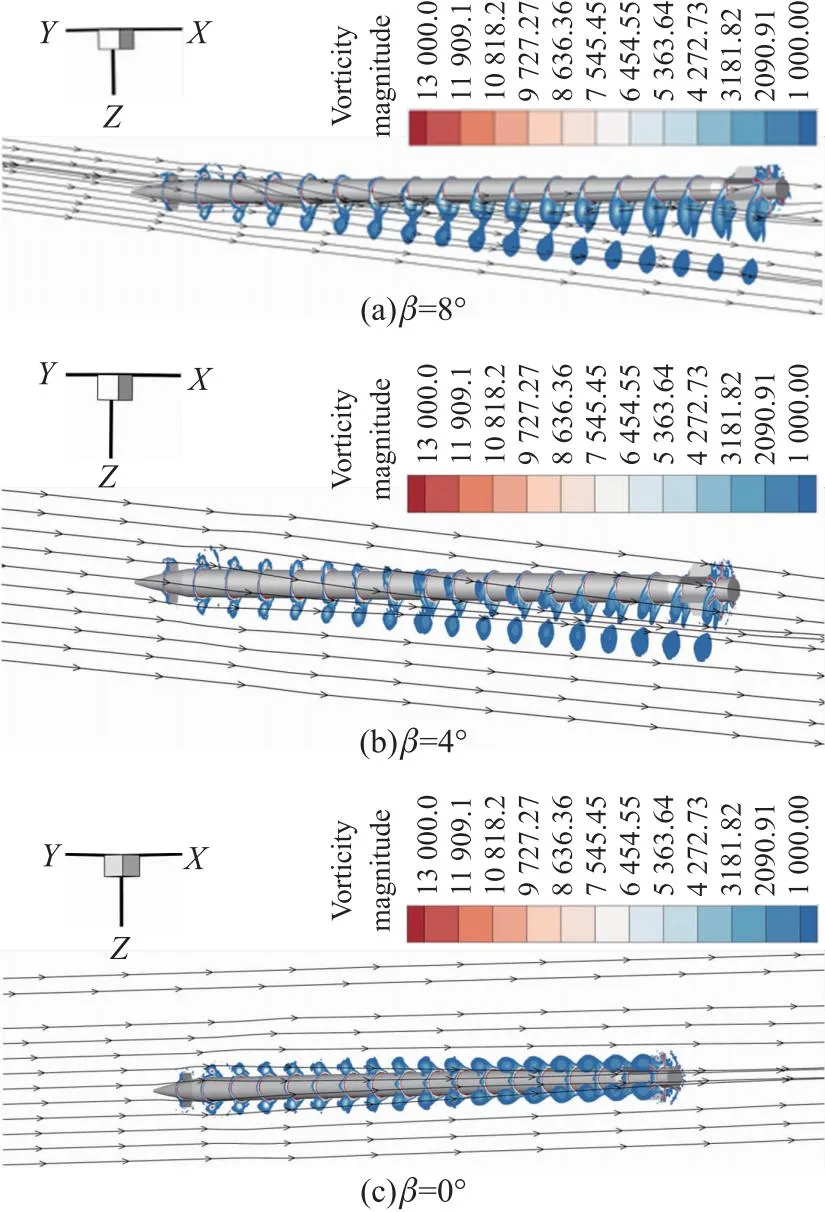
图17 Ma=3.0,δ=5°,α=4°时侧滑角对流线与涡量的影响Fig.17 Effect of β on streamline and spanwise vorticity of different rudder deflection angles when Ma=3.0 andδ=5° and α=4°
可以看出当β=0°时,弹箭涡量对称分布在上侧及弹体圆周内;在黏性耗散作用下,涡量强度沿轴向呈下降趋势,但其作用范围却越来越大;鸭舵的洗流流经尾翼,对尾翼产生了干扰。但当β>0°时,涡量分布向弹箭一侧偏转,且侧滑角越大偏转越明显;鸭舵涡对尾翼的作用区域减小,且强度逐渐降低;鸭舵的洗流向弹体一侧偏移由于弹体较长,鸭舵的洗流对部分尾翼不产生干扰。
扰动在亚音速的传播区域为全流场,在超音速时在马赫锥内。对比图18和图19可知,当β=0°时鸭舵的洗流流经尾翼,对尾翼产生了干扰,弹箭下尾翼和弹头正下方压力较大,从YOZ或XOZ剖面压力云图看,压力均对称分布。
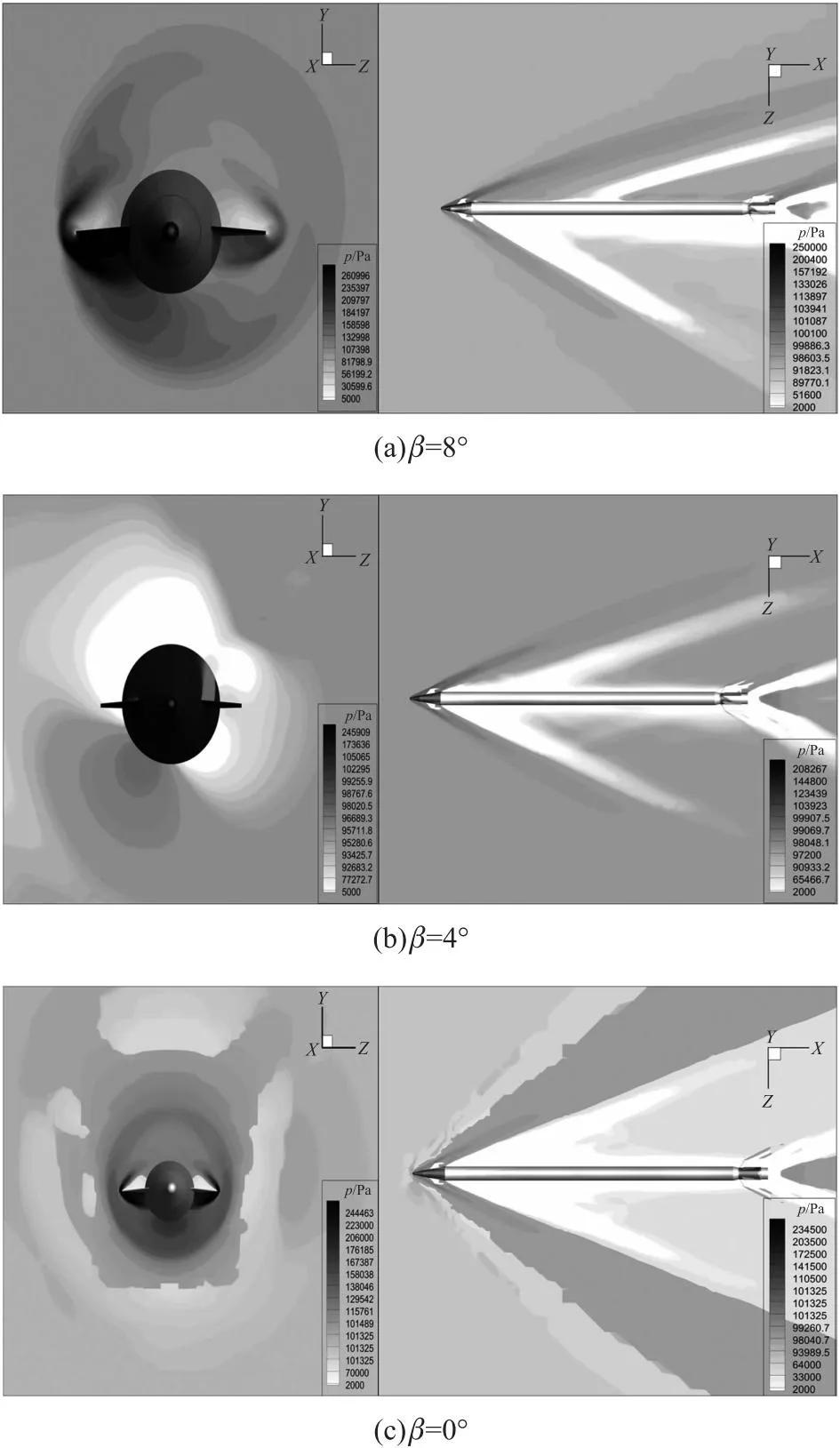
图18 Ma=3.0,δ=5°,α=4°时压力云图对比Fig.18 Comparison of pressure contour whenMa=3.0,δ=5° and α=4°
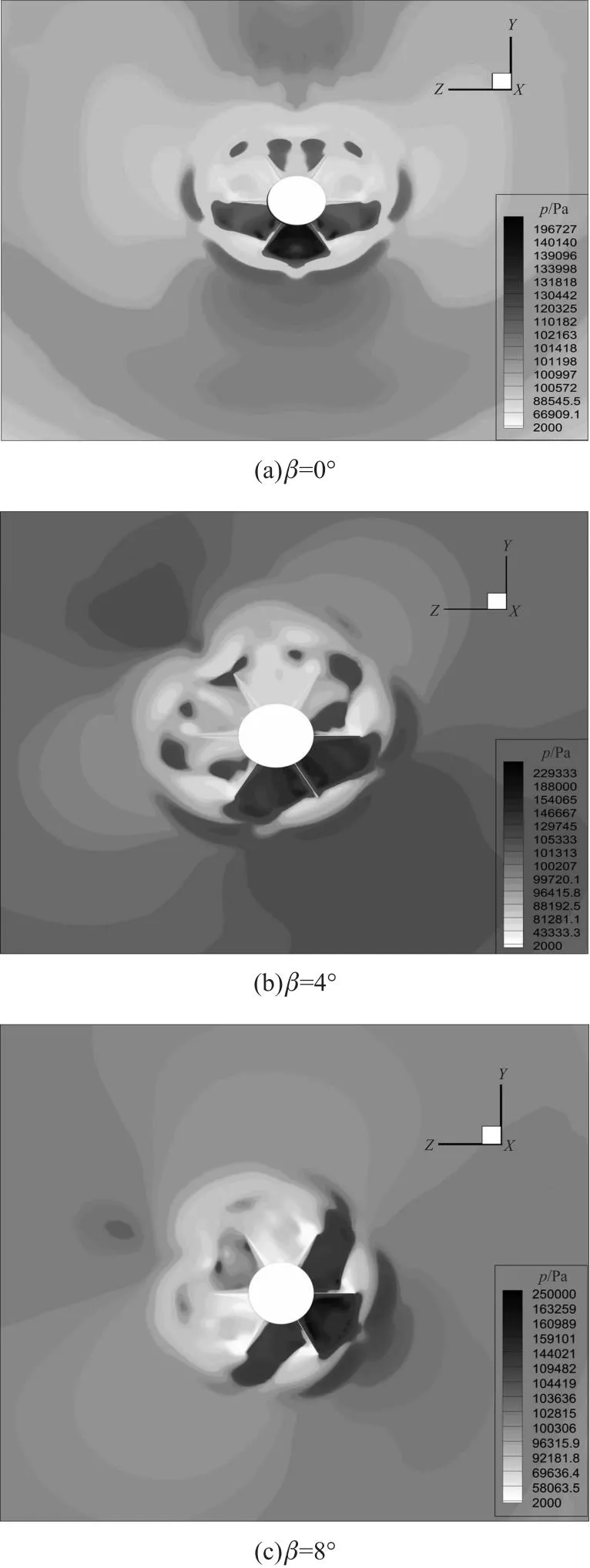
图19 Ma=3.0,δ=5°,α=4°时尾部压力云图Fig.19 Pressure contour of tail whenMa=3.0,δ=5° and α=4°
当β≠0°时,弹头下方高压区向一侧转移,鸭舵上方形成膨胀波,鸭舵上方出现低压区;而尾翼部分的压力相比β=0°时的弹箭低压区域范围扩大,部分尾翼不在洗流的影响区,使得尾翼左右压力分布不对称,从而导致全弹滚转力矩增大。
2.2.3 侧滑角对操纵性的影响
弹箭的操纵性与俯仰气动特性紧密结合,其衡量指标通常是平衡攻角αb,即舵翼偏转进行机动时,俯仰力矩系数为零对应的攻角[14]。弹箭在稳定飞行时的平衡比K,即平衡攻角与舵偏角的比值大小,通常用其来衡量弹箭的操纵性,平衡比越高,说明弹箭的操纵性越高[15]。
(2)

弹箭的静稳定性是保证弹箭稳定飞行的重要指标。压心到质心的距离与全弹长的比值称为静稳定储备量,也叫静稳定度。
(3)

(4)
对带有尾翼的大长径比无控弹箭而言,一般要求其静稳定度为12%~20%;而有控飞行弹箭,为了操纵灵活,其稳定储备量却也不能过大[13],一般来说鸭式布局弹箭其纵向静稳定度为8%~12%。静稳定度的大小对弹箭操纵性的关系主要为:静稳定度较高时,其操纵性能较差;较低的静稳定度,操纵性越好。平衡比越小,舵片需要偏转一个大的角度才能使得攻角偏转,从而使弹箭具有较好的操纵性。对于有控弹箭,一般是因为其纵向静稳定度增大,会导致平衡攻角减小,操纵性变差。
图19为δ=0°时纵向静稳定度随攻角的变化曲线;表3展示了δ=15°、β=0°时平衡攻角随马赫数的变化。
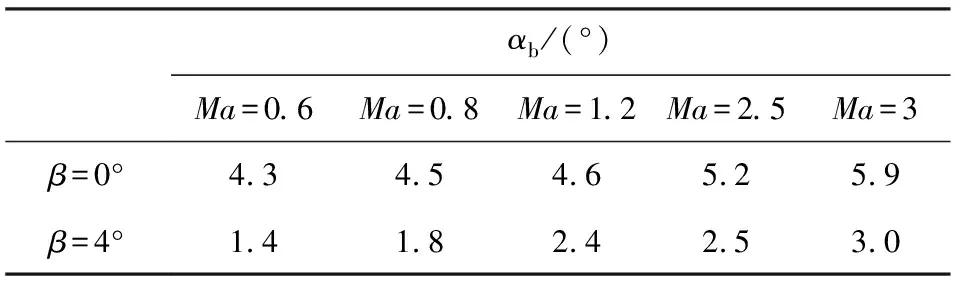
表3 δ=15°时的平衡攻角Table 3 Balanced angle of attack when δ=15°
由图20(a)可发现,弹箭在Ma=0.8、β=0°时静稳定度随攻角的增加而增加,且始终在0~20%范围内,可以看出该弹箭是纵向静稳定的。当β≠0°时,弹箭的静稳定度增大,β=8°时静稳定度略有增加,而在β=4°时静稳定度在小攻角处增加更为明显且随攻角的增大增值越小,10°攻角时基本不变。而在图20(b)中Ma=3.0、β=4°时静稳定度仍然在小攻角处增加明显,在4°攻角处增加最大,增加了16.7%左右;而在8°侧滑时静稳定度除4°攻角外却整体降低。在表3中,4°侧滑角时的平衡攻角相比侧滑角为零弹箭的平衡攻角减小较为显著。
图20 δ=0°时静稳定度的变化曲线Fig.20 Variation of static stability when δ=0°
2.3 弹尾气动特性的分析
图21为俯仰舵偏为10°时尾翼的法向力系数曲线。
图21 δ=10°时尾翼法向力系数Fig.21 Normal force coefficient of tail when δ=10°
可以看出在Ma=1.2时,尾翼的法向力系数随攻角的增加而线性增大,且随侧滑角的增加尾翼的法向力也变大,弹箭的压心后移,静稳定度变大,操纵性变差,严重的影响了弹箭的俯仰操纵效率;而在Ma=3.0时,尾翼法向力系数亦随攻角的增加而增大,4°侧滑角时的尾翼法向力相比于0°侧滑的弹箭增加明显,但8°侧滑时尾翼的法向力系数相比于4°侧滑时有所降低,并且在接近8°攻角之后法向力系数却大幅降低,且低于0°侧滑时的弹箭。这进一步解释了前文Ma=3.0,β=8°时弹箭的俯仰力矩系数曲线变化规律。
对比不同马赫数下翼1到翼6的法向力系数,发现翼2法向力变化是导致尾翼整体法向力变化的主要原因。图22为尾翼1与尾翼2的法向力系数曲线。

图22 δ=10°时尾翼法向力系数Fig.22 Different normal force coefficient of tail when δ=10°
图23 Ma=3.0,β=8°,δ=10°尾翼截面流线Fig.23 Streamline of section when Ma=3.0,β=8° and δ=10°
翼1在不同Ma下的变化趋势基本相同,随着侧滑角的增大,背风翼翼1的法向力系数逐渐降低;翼2在Ma为1.2时接近8°攻角之后处法向力系数有明显增加,而在Ma为3.0时法向力系数却大幅减小。尾翼2出现的法向力系数减小现象,进一步解释在Ma=3.0、β=8°时弹箭的滚转力矩系数出现大幅增加的现象。
在Ma=3.0时,相比2°和4°攻角,在8°和10°攻角时在翼2处出现下洗涡,且攻角越大涡的强度越大,进而使得翼2下表面压力降低,翼2的法向力减小,从而导致尾翼整体法向力系数减小,尾翼当地攻角降低。
3 结论
本文通过用数值模拟方法对带侧滑角非零的大长细比鸭式布局制导弹箭在不同马赫数、攻角和舵偏角下的气动特性进行了研究,得出如下结论:
①亚跨音速时,弹箭的升力系数随着侧滑角的增大而增加;俯仰力矩系数随攻角的增加而减小,并且在0°舵偏角、攻角大于6°后时出现了大幅度的下降,随着舵偏角的增加,俯仰力矩系数随攻角下降幅度更明显。
②Ma=3.0时,升力系数随侧滑角的增大而增加,在8°攻角之后升力系数增加较明显。弹箭的俯仰力矩系数随攻角的增加而减小,且4°侧滑角时相比于0°侧滑时俯仰力矩系数减小,静稳定度增加;但在8°侧滑时俯仰力矩系数整体相比于0°侧滑时却有所增加,静稳定度降低。
③与0°侧滑角弹箭相比,亚跨音速时弹箭尾翼部分的法向力随侧滑角的增大而增大,最终导致弹箭的俯仰操纵效率降低。Ma为3.0时,多数情况和亚跨音速类似,但在8°侧滑接近8°攻角之后尾翼法向力系数却有所降低,当地攻角减小,弹箭的操纵效率有所提高。
