变工况滚动轴承异常状态局部切空间分类检测
2024-01-03肖焕丽
肖焕丽
(西安交通工程学院,陕西 西安 710399)
0 引言
机械设备无论是在工作效率方面还是在工作安全方面均远远超过人工劳作,因此一些高端机械设备被广泛应用于生产劳动、企业物流等多种领域,成为推动国民经济快速发展的新型科技。其中,变工况下的滚动轴承,是很多机械设备的重要组成部分[1]。变工况滚动轴承的状态若存在异常会导致机械设备运作瘫痪,进而影响后续环节的生产。因此,为了保证机械设备始终保持高效的工作状态,需要对变工况下滚动轴承的异常状态实时检测,以人工为主的检测方法已经无法满足需求,一些高端智能化的检测方法成为研究重点。
李贝贝等[2]通过自编码网络采集滚动轴承振动数据,并利用马氏距离快速检测算法提取滚动轴承振动数据特征,将提取到的滚动轴承振动数据特征输入以网络初始化参数为基础构建的特征学习模型中反复训练,实现变工况滚动轴承异常状态的检测。蒋雨良等[3]通过多任务学习方法获取滚动轴承数据分布,并将获取到的数据分布与变工况下轴承温度关联信息相结合,使数据分布以温度预测值为单位重新构成具备特征向量的温度置信区间,将极大似然估计函数代入温度置信区间,实现变工况滚动轴承异常状态的检测。
然而在实际应用中发现,上述方法对轴承异常数据特征的提取率较差,导致其存在检测率低的问题。主要是因为变工况滚动轴承异常状态数据,在特征空间上呈现高维模糊分类特征,异常状态数据的子特征区分极为困难。为了解决上述方法中存在的问题,本文提出变工况滚动轴承异常状态局部切空间分类检测方法。
1 变工况滚动轴承局部切空间异常数据特征提取
通过对滚动轴承在变工况下的异常运行数据进行特征提取,能够为后续异常状态局部切空间分类检测提供数据支持,有效诊断轴承是否存在异常状态。LTS降维方法能够将高维数据转化为低维数据,同时保留数据的关键特征。在变工况滚动轴承局部切空间异常数据特征提取过程中,LTS被用于处理变工况滚动轴承的数据,使局部切空间满足分类空间映射条件,能够更好地捕捉滚动轴承在变工况下的异常状态。DBN算法能够从大量运行数据中学习到数据深层特征,因此通过DBN算法从异常数据训练中提取异常特征,可以有效提高异常检测效率。通过特征提取能够在滚动轴承运行过程中实时地进行异常检测,及时发现滚动轴承的异常状态,避免因为轴承故障而引起的设备停机等损失。
1.1 变工况滚动轴承异常数据降维处理
现阶段比较成熟的数据降维方式主要包括主成分分析法、线性判别分析法、多维尺度分析法和局部切空间排列法[4],本文设计一种局部切空间排列法(local tangent space alignment,LTSA)。
LTSA通过将数据集样本点映射至局部切空间,达到滚动轴承异常数据全面降维的目的。LTSA也具备这一类算法独特的邻域数据依赖性。在滚动轴承异常数据降维的过程中,滚动轴承异常数据会因为邻域数据依赖性主动聚合。这种聚合反应限制了异常数据的空间映射范围,并与降维过程产生冲突,需要利用K-近邻方法及时将聚合数据分离,消除邻域数据依赖性所带来的降维干扰。
LTSA对滚动轴承异常数据降维的具体步骤如下:首先利用LIST算法将滚动轴承异常数据转化为高维嵌入坐标下的数据集样本点,再利用局部切空间排列法将全部数据集样本点映射至低维局部切空间中。空间内数据在邻域数据依赖性的作用下主动聚合,为了防止这种情况的发生,局部切空间结合K-近邻方法消除聚合现象。LIST算法的表达式如下:
(1)
式中:Ψ表示LIST常数;G表示参与转化的滚动轴承异常数据量;dm表示滚动轴承在高维映射区域m内的异常数据的转化率;dn表示滚动轴承异常数据在高维映射区间n内的转化误差。
局部切空间排列法的表达式如下:
(2)
式中:N表示局部切空间排列常数;xα表示参与映射的数据集样本点总数;xβ表示低维局部切空间的权重;eT表示数据集样本点的映射误差。
K-近邻方法的表达式如下:
X=ha(i-2ωj)
(3)
式中:ha表示K-近邻常数;i表示聚合现象消除系数;ωj表示聚合现象消除误差。
结合K-近邻方法的聚合数据分离过程,得到局部切空间内数据集样本点映射分布如图1所示。
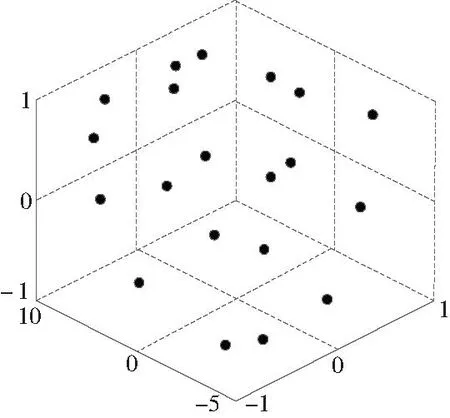
图1 局部切空间内数据集样本点映射分布图
滚动轴承异常数据在低维局部切空间内,根据欧几里得原理完成降维,欧几里得原理的表达式如下:
(4)
式中:B表示欧几里得常数;λ表示滚动轴承异常数据的降维阈值;I表示欧式距离。
1.2 基于深度置信网络的滚动轴承异常数据特征提取
经过降维的滚动轴承异常数据在特征提取方面表现出良好的可操作性。深度置信网络作为数据特征提取的有力工具,其内部结构主要由多个限制波尔茨曼机连接组成[5]。限制波尔茨曼机可以深度挖掘网络输入信息,提取信息关键特征并组成特征训练矩阵R和T[6]。限制波尔茨曼机通过隐含层训练矩阵R进行滚动轴承异常数据特征识别,将识别后的特征传递至对应的可见层训练矩阵T。在可见层中进行线性变换和激活函数处理,完成滚动轴承异常数据特征降维,为后续特征训练提供可靠的特征输入。
深度置信网络结构如图2所示。

图2 深度置信网络结构
将降维成功的滚动轴承异常数据输入深度置信网络中,深度置信网络提取滚动轴承异常数据特征主要分为异常数据训练和特征训练矩阵两部分。
1)异常数据训练
深度置信网络针对异常数据训练过程本质是多个限制波尔茨曼机深入挖掘异常数据特征的过程。滚动轴承异常数据在隐藏层中通过贪婪学习算法提取异常数据重要信息[7],然后经过双向连接通路进入可见层。可见层接收已成功提取的滚动轴承异常数据重要信息,并利用对比散度算法对异常数据重要信息进一步挖掘,获取基于滚动轴承异常数据的特征,表达式如下:
Y=γf(z0)·δf(zi)
(5)
式中:γ表示贪婪学习常数;f(z0)表示参与重要信息提取的异常数据量;δ表示异常数据的重要信息提取率;f(zi)表示异常数据的重要信息提取误差系数。
对比散度算法的表达式如下:
(6)

2)特征训练矩阵
在利用深度置信网络中的可见层提取滚动轴承异常数据的特征向量后,并不能保证所提取的特征向量达到最优检测效果。因此,深度置信网络可见层会在输出特征向量前,启动内置深度置信网络模型对特征向量优化[8],并根据优化后特征向量权值,将特征向量排列成分类精确度高、检测效果好的特征训练矩阵。
深度置信网络模型的函数表达式如下:
(7)
式中:v(α-1)表示深度置信网络模型的权重;w表示特征向量优化系数;ρ表示特征向量的优化误差。特征向量权值的计算表达式如下:
(8)
式中:hrecon表示特征向量权值的计算常数;herror表示特征向量权值的计算误差。
2 基于SVM分类器的滚动轴承异常状态检测
将上述提取的特征输入SVM分类器中,利用非线性映射函数将二维特征矩阵映射到三维分类空间中再将超平面结构加入其中[9],在多项式核函数的引导下找到对应的子特征分类区域,根据分类结果实现变工况滚动轴承异常状态的检测。
SVM分类器通过超平面将二维视角下待分类数据转化为三维视角下的分类数据。SVM分类器的分类过程如图3所示。
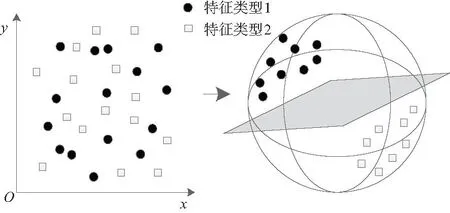
图3 SVM分类器的分类过程
超平面作为SVM分类器的核心结构,是由线性条件下的最优分类平面逐渐演变而来。SVM分类器的输入样本不同,超平面的选择也随之不同。想要利用SVM分类器对滚动轴承异常数据的特征训练矩阵分类,需要优先选择适合特征训练矩阵的超平面结构[10]。首先利用线性函数获取特征训练矩阵的线性可分系数,再根据超平面学习原理寻找符合该线性可分系数的超平面结构。线性函数的表达式如下:
(9)
式中:s表示线性常数;2σ表示特征训练矩阵线性可分系数的获取率;l表示特征训练矩阵线性可分系数的获取误差。
表示超平面学习原理的表达式如下:
(10)
式中:αy表示超平面学习常数;ξ表示符合线性可分系数的超平面结构参数。
若特征训练矩阵与线性函数结合后未能获取基于该矩阵的线性可分系数,而是得到了不同于正常情况的线性不可分系数,则说明该特征训练矩阵不满足SVM分类器的分类条件。此时,需要在寻找基于该矩阵的超平面结构前,在该矩阵中引入松弛变量(非负标量)对矩阵约束优化。
松弛变量的加入可以使特征训练矩阵的分类间隔增大,当特征训练矩阵的分类间隔增大至κ时,该矩阵满足SVM分类器的分类条件。松弛变量对矩阵约束优化的表达式如下:
(11)
式中:κ表示松弛变量参数;ej表示矩阵约束优化系数;ei表示特征训练矩阵分类间隔的增大率;n×m表示特征训练矩阵分类间隔的增大误差。
在成功搜索到超平面结构后,SVM分类器开始对变工况滚动轴承运行状态的特征训练矩阵进行分类。SVM分类器首先利用非线性映射函数将二维视角下的特征训练矩阵映射到三维视角下的分类空间中。由于分类空间的维度非常低,只有经过降维的低维数据才能满足空间映射条件,此时就可以发现,上文所述的基于滚动轴承异常数据降维过程是非常有必要的。
在非线性映射函数映射特征训练矩阵时,极易由于矩阵内存储的滚动轴承异常数据特征向量过多而导致分类空间映射效率下降,但SVM分类器利用核函数巧妙地解决了这个问题。核函数是以泛函有关理论为基础构建的运算函数,其运算过程满足Mercer条件,即当输入向量内积运算率过高时,核函数可以调整对应空间的决策系数,以此达到提升空间映射效率的目的。非线性映射函数的表达式如下:
(12)
式中:cT表示核函数对应空间决策系数;ui表示轴承状态数据特征训练矩阵的映射系数;H表示特征向量矩阵的映射误差。
经过映射的特征训练矩阵在三维视角下混乱且无序,将适合特征训练矩阵的超平面结构加入其中,矩阵内特征会在多项式核函数的引导下找到对应的子特征分类区域,然后根据分类结果检测变工况滚动轴承的异常状态,从而实现全矩阵特征向量的分类。多项式核函数子特征分类过程如下:
(13)
式中:vi表示多项式核常数;vj表示轴承状态数据子特征区域的搜寻率;ΔS表示变工况滚动轴承状态数据子特征区域的搜寻误差。根据SVM分类器的分类输出结果即可实现变工况滚动轴承异常状态的检测。
3 试验与结果
为验证基于深度置信网络的变工况滚动轴承异常状态检测方法的整体有效性,需要对其展开如下测试。选择异常情况不同的9种型号的变工况滚动轴承作为试验对象。试验台由几个模块组成,从左到右依次为:交流电机、速度传感器、减速器、热电偶。通过将不同损伤类型的滚珠轴承安装在轴承测试模块中,生成实验数据。试验对象如图4所示。

图4 试验对象
9种型号的变工况滚动轴承的具体异常表现如表1所示。

表1 9种型号变工况滚动轴承的具体异常表现
将试验对象分为3组,组1包括型号a、型号b和型号c;组2包括型号d、型号e和型号f;组3包括型号g、型号h和型号i。由于变工况滚动轴承的工作环境常伴有噪声和负荷变化,因此可以通过在3组试验对象中添加噪声或调整3组试验对象所承载的负荷,建立新的试验环境。
3.1 添加噪声
滚动轴承异常状态检测容易受到环境噪声的干扰,增加异常数据的检测与处理难度。为了验证本文方法的有效性,在3组试验对象中分别添加300Hz、500Hz、800Hz的噪声。采用本文方法、文献[2]方法和文献[3]方法检测噪声添加后3组试验对象的滚动轴承异常状态,对比不同方法在含噪情况下基于3组试验对象的异常状态检测率(图5),以此来判断不同方法针对变工况滚动轴承异常状态的检测性能。
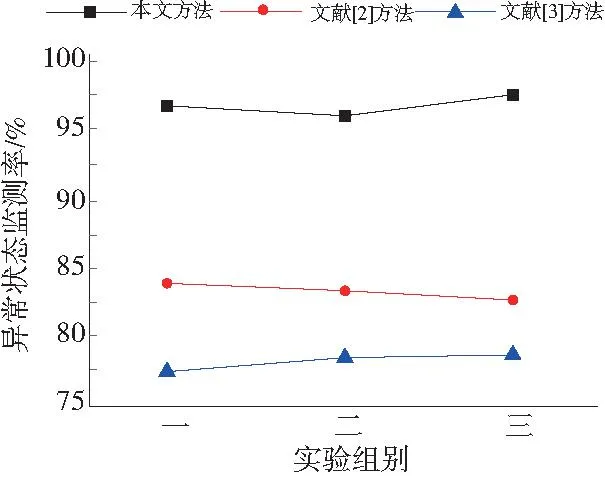
图5 不同噪声情况下不同方法的异常状态检测率
由图5可知,文献[2]方法和文献[3]方法基于3组试验对象的异常状态检测率分别低于85%和80%,说明文献[2]方法和文献[3]方法在面对任意噪声含量的变工况滚动轴承时,二者对异常状态的检测率均较低,即文献[2]方法和文献[3]方法针对变工况滚动轴承异常状态的检测效果差。本文方法基于3组试验对象的异常状态检测率均不低于95%,说明本文方法在面对任意噪声含量的变工况滚动轴承时,其异常状态的检测率均较高,即本文方法针对变工况滚动轴承异常状态的检测效果更好。
经上述对比可知,本文方法针对变工况滚动轴承异常数据的检测性能明显优于传统方法。因为本文方法采用局部切空间排列法对变工况滚动轴承异常数据降维,使变工况滚动轴承异常数据特征的提取率增高。SVM分类器对变工况滚动轴承异常数据特征的适配性也大幅度增加,这样获取的输出结果检测率高、检测性能好。
3.2 调整承载负荷
不同负荷会影响滚动轴承的转速、摩擦力矩等,增加了异常状态特征映射的复杂度。为了进一步验证变工况下滚动轴承异常状态检测性能,把调整轴承承载负荷作为测试变量,将3组试验对象的承载负荷分别调整为1.3×0.396 kW、3.3×4.098 kW、1.9×3.913 kW,采用本文方法、文献[2]方法和文献[3]方法检测承载负荷调整后,3组试验对象的滚动轴承异常状态。对比不同方法在不同承载负荷下基于3组试验对象的异常状态检测率(图6),判断不同方法针对变工况滚动轴承异常状态的检测性能。

图6 不同承载负荷下不同方法的异常状态检测率
由图6可知,本文方法基于3组试验对象的异常状态检测率均不低于90%,说明本文方法在面对任意承载负荷时,其变工况滚动轴承异常状态的检测率均较高。文献[2]方法和文献[3]方法基于3组试验对象的异常状态检测率分别低于80%和85%,说明文献[2]方法和文献[3]方法在面对任意承载负荷时,二者对变工况滚动轴承异常状态的检测率均较低。因为本文方法在非线性映射函数可以较好地将二维特征映射到三维分类空间中,可以减少负荷变化等因素对机组异常状态检测结果的影响,在多项式核函数的引导下进一步提高了检测率。经上述对比,进一步验证了本文方法对变工况滚动轴承异常状态的检测性能好。
3.3 早期异常点检出时间
由于早期滚动轴承异常点的特征并不突出,在此期间异常状态的检测难度较大,但滚动轴承的异常点检出时间越早,越能及时修正异常状态,避免严重事故的发生。分别采用本文方法、文献[2]方法和文献[3]方法检测上述3组试验对象的滚动轴承异常状态,通过对比不同方法的早期异常点检出时间,判断不同方法针对变工况滚动轴承异常状态的检测性能。不同方法的早期异常点检出时间对比如图7所示。
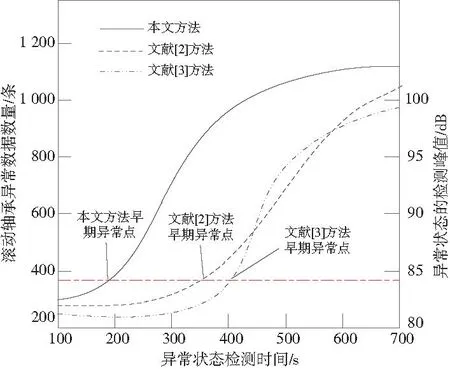
图7 不同方法的早期异常点检出时间
由图7可以看出,本文方法的早期异常点检出时间小于200s,说明本文方法能够快速检出变工况滚动轴承异常状态,即本文方法的检测效率高。文献[2]方法和文献[3]方法的早期异常点检出时间均超过300s,说明文献[2]方法和文献[3]方法并不能快速检出变工况滚动轴承异常状态,即检测效率低。经上述对比可知,本文方法针对变工况滚动轴承异常状态的检测效率明显优于传统方法。因为本文方法经过局部切空间排列法降维处理滚动轴承数据后,加快了后续异常特征提取及寻找子特征分类区域的计算过程,进而缩短了早期异常检测点的检出时间。
4 结语
近年来,机械设备的运作原理变得越来越复杂,滚动轴承的异常状态检测也成为复杂工作环境下的重要研究课题。为此,本研究基于深度置信网络设计了一种变工况滚动轴承异常状态检测方法,并取得了较好的应用效果。
在未来的研究中,如何在保证变工况滚动轴承异常状态检测性能的同时,对变工况滚动轴承异常状态检测过程实时监控,将是研究人员工作的重点。
