一种码垛机器人小臂的轻量化设计
2023-12-29董庆运靳刚谭斌
董庆运,靳刚,谭斌
(天津职业技术师范大学a.工程实训中心;b.机械工程学院,天津 300222)
0 引言
码垛机器人以其出色的动作灵活性、作业高效性以及对工作任务变化的适应性而被广泛应用于现代生产作业中。机械臂是码垛机器人重要的功能部件,通过轻量化设计,一方面有利于降低能耗,另一方面有利于减小机械臂对机器人系统产生的惯性冲击,提高动态性能。本文以一种最大负载能力为50 kg的码垛机器人小臂为对象,开展轻量化设计研究。
围绕机械臂轻量化的研究成果很多。文献[1]~[8]所涉及的机器人大多工作在低速轻载工况,相应的轻量化研究主要基于静力学分析,较少涉及固有频率、振型等动力学方面的考虑。然而对于工作在高速、重载工况下的码垛机器人而言,机械臂携带负载高速旋转,此时离心惯性力以转动角速度的二次方的比例增大,同时关节力矩、重力矩实时变化,动载荷变得不可忽略[9]。因此,对于此类高速重载码垛机器人的轻量化设计研究而言,本文从静力学和动力学两个层面出发开展研究。
研究思路:基于有限元法对小臂进行静力学分析、模态分析;以小臂质量为优化目标,以许用应力、合位移以及第一阶固有频率为约束条件,利用Box-Behnken和RSM方法建立优化目标函数的代理模型,完成优化求解与验证。
1 有限元模型的建立
小臂的简化模型如图1所示,质量为18.436 kg。

图1 小臂的三维简化模型
材料为7075铝合金;弹性模量为7.19×1010N/m2;泊松比为0.33;抗剪模量为2.689×1010N/m2;密度为2810 kg/m3;张力强度为2.19×108N/m2。
网格划分,采用基于混合曲率的网格,最大单元大小为30.178 mm;最小单元大小为6.329 mm;节点总数为30 670;单元总数为15 182。得到的有限元模型如图2所示。

图2 小臂的有限元模型
2 小臂的静力学分析
利用建立的有限元模型进行静力学分析。
1)施加位移约束。
根据小臂的装配关系施加位移约束,在小臂与小臂驱动连杆以及小臂与大臂连接的铰链孔处,均施加圆柱面约束,如图3所示。
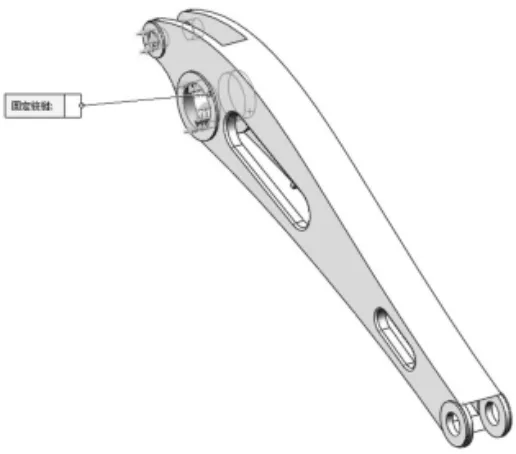
图3 位移约束
2)施加载荷。
小臂处于水平位置时,其处于悬臂梁受力状态,负载重力矩最大,因此在小臂前端铰链孔施加最大负载力490 N,方向竖直向下,如图4所示。
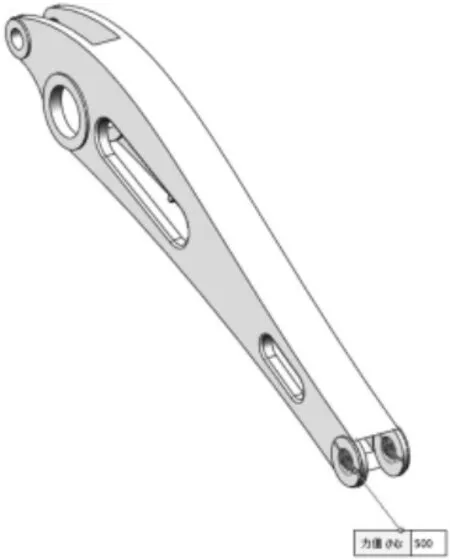
图4 施加载荷
3)静力学分析求解。
经过静力学分析求解得到,小臂的应力最大值为4.202 MPa,位移最大值约为0.182 mm,如图5和图6所示,由静力学分析可知小臂具有轻量化设计的潜力。

图5 等效应力云图

图6 合位移云图
3 小臂的模态分析
如前文所述,对于高速重载码垛机器人的结构优化,除了静力学分析之外,还要考虑其动态性能。为了确定动力学优化目标,对小臂进行模态分析。
1)小臂的模态分析。2)施加位移约束。根据小臂的装配关系,仍在各铰链孔均施加圆柱面约束,如图3所示。3)模态分析求解。
计算模态并提取前四阶振型,如图7所示。
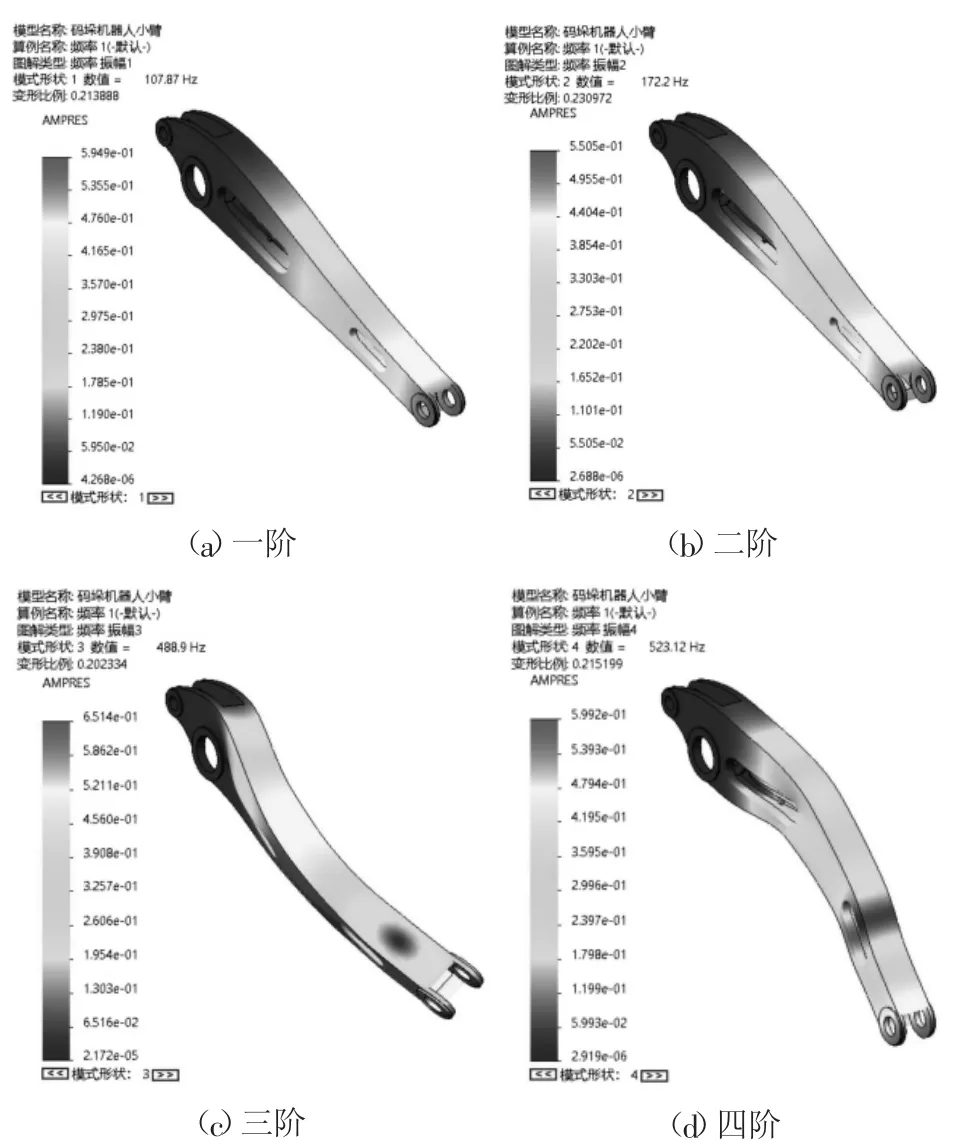
图7 小臂前四阶模态振型
4 小臂优化设计模型的建立
1)设计变量的选择。
根据小臂的结构特点,选取了3个结构参数X=(x1,x2,x3)T,如图8所示,它们的名称、初始值以及取值范围如表1所示。
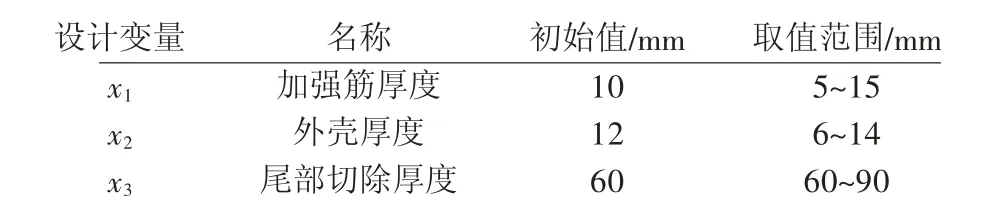
表1 设计变量列表
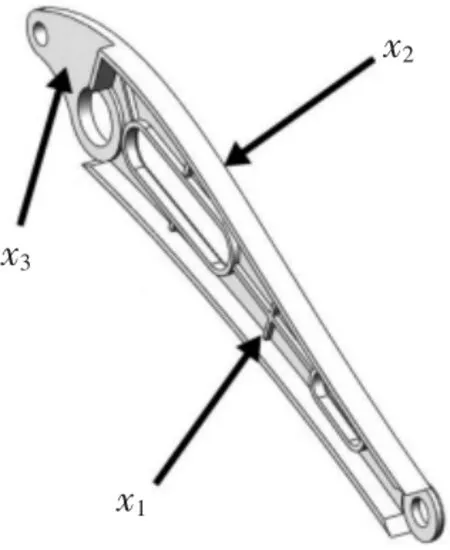
图8 结构参数选取
2)目标函数的建立。
以大臂上的质量最小为优化目标,故目标函数为
根据所选设计变量的取值范围和Box-Behnken设计方法得到实验设计矩阵表,共100组,如表2所示。
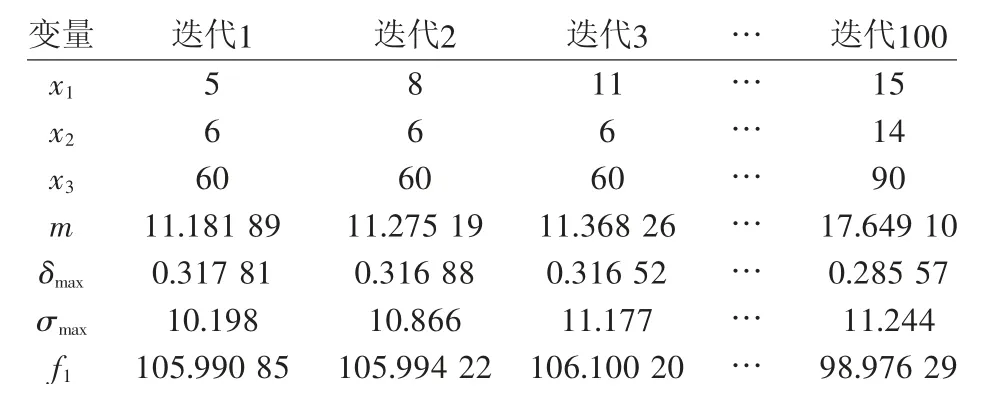
表2 实验设计矩阵
利用表2中实验设计矩阵可得到质量、第一阶固有频率、最大等效应力、最大合位移4个结构性能参数的RSM模型:m(X),
3)约束条件。
a.保证第一阶固有频率不降低。通过模态分析,提取第一阶固有频率f1(X),初始模型的第一阶固有频率[f1]=107.87 Hz。约束函数C1(X)的表达式为
b.保证满载时最大合位移在许用范围内。通过静力学分析,提取最大合位移δmax(X)。合位移的允许值为[δ]=L/1000。其中,L是小臂的有效长度(1000 mm)。约束函数C2(X)的表达式:
c.保证满载时最大等效应力在许用范围内。通过静力学分析,提取最大等效应力σmax(X)。最大应力的允许值为[σ]=[σ0]/n。其中:[σ0]是7075铝合金的许用应力95 MPa;n是安全系数,这里取2。约束函数C3(X)的表达式为
5 计算结果与分析
通过计算得到优化结构参数,如表3所示,并据此修改小臂三维模型并得到目标性能参数的优化结果,如表4所示。经过结构优化,小臂的质量减轻了41.89%;第一阶固有频率减小了0.16 Hz,对结构的振动稳定性的影响可以忽略;结构的最大等效应力和最大合位移均有不同程度的增大,但仍都在允许范围内。改进后模型的分析结果如图9~图11所示。
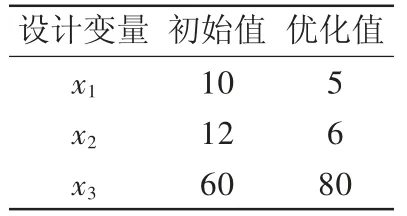
表3 结构参数优化结果 mm
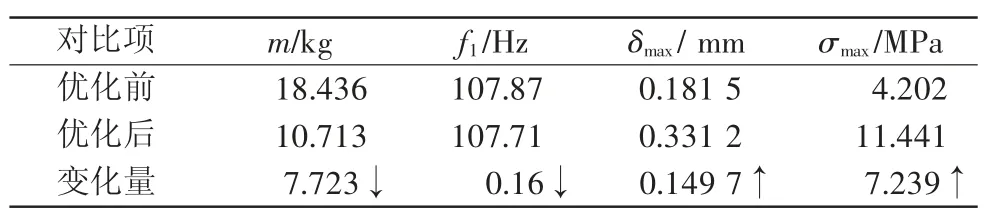
表4 目标性能参数优化结果

图9 优化后模型的等效应力

图10 优化后模型的合位移

图11 优化后模型的一阶振型
6 结语
1)本文以最大负载能力50 kg码垛机器人的小臂为优化对象。建立了小臂的有限元模型,并进行了静力学分析和模态分析,为轻量化设计提供基础。
2)以质量最小为优化目标,以结构参数为设计变量,以第一阶固有频率不降低、最大合位移和最大等效应力在允许范围内为约束条件,利用Box-Behnken和RSM方法获得目标函数和约束函数的代理模型,并完成小臂优化。
3)通过优化后模型的对比分析表明,在保证第一阶固有频率、最大合位移和最大等效应力在允许范围内的情况下,质量减轻了约41.89%,验证了本文优化设计方法的有效性。
