基于全向轮驱动的重型设备转运安装平台设计
2023-12-29武晓民侯朋飞朱容萱张嘉元李涛
武晓民,侯朋飞,朱容萱,张嘉元,李涛
(中国人民解放军 96881部队,河南 洛阳 471002)
0 引言
重型设备转运安装平台主要针对柴油发电动机组、降湿机组等重型设备转运安装受场地条件限制[1],不适宜起重吊装设备使用而研制。该平台可实现重型设备在狭小空间条件下的快速装载、转运、就位及找平找正,提高设备转运安装自动化程度,降低安全隐患,提高施工效率。
在工程建设中,柴油发电动机组、液压防护门、桥式起重机、燃油罐等重型设备的转运和就位受作业场地条件限制,在狭小空间条件下传统起重吊装设备无法使用,例如柴油发电动机组、燃油罐的二次搬运和就位,只能依靠滚杠滚、倒链拉、撬杠撬、方木垫等传统施工手段进行作业,工作效率低,劳动强度大,安全隐患多,严重制约了工程施工进度[2]。重型设备转运安装平台在不借助其它起重、运输设备的情况下,实现重型设备在狭小空间条件下的快速装卸、转运、就位及找平找正。能显著提高施工效率和工程质量,有效降低劳动强度和安全隐患。
本文研究确定了液压泵站、油缸、行走机构、全向轮、调整装置、升降装置及卡具的规格型号、连接方式、安装形式等,同时完成了结构设计计算。
1 设计方案
本文设计的基于全向轮驱动的重型设备转运安装平台采用框架式结构,遥控操作,全向四轮驱动,在4个车轮不同转向和速度的配合下,可实现前进后退、横向平移、侧向移动、绕中心自转、实时转向前进等功能。平台运行平稳,整体刚度高,升降操作灵活,节省就位和撤离操作时间。
1.1 设备组成
重型设备转运平台由机架、升降动力舱、行走动力舱、摆动升降臂、全向轮、液压缸、吊具、操控设备、主被动安全装置等部件组成。
1)机架。
机架采用型钢焊接而成,上部安装有4只吊装环,用于设备起吊与固定。
2)升降动力舱。
机架两侧为升降动力舱,舱内集成安装液压动力系统、电控板等,用于接收控制指令,控制摆动升降臂动作。
3)摆动升降臂。
摆动升降臂用于实现平台机架上下升降功能,与机架、液压缸三者之间均采用铰接连接,形成连杆机构,通过液压缸的伸缩实现摆动升降臂摆动,完成平台升降。
4)行走动力舱。
行走动力舱安装于摆动升降臂底部,舱内集成安装电池、步进电动机及驱动器,信号接收板卡、运动控制板卡等,用于接收行走控制指令,实现平台定向行走。
5)全向轮。
全向轮安装于行走动力舱两侧,由步进电动机驱动。它主要由轮毂和具有特殊轮廓曲线的滚子组成,滚子均匀地分布在轮毂上,可以自由旋转,它的轴线与轮毂轴线成45°角,所有滚子组成的外包络线近似为一个圆,依靠4个机轮不同的方向和速度,使驱动力最终合成在任何要求的方向上,从而保证平台能够平移至指定位置[3]。
6)主被动安全装置。
主被动安全装置包括急停按钮、驻车制动装置、微型红外防撞仪和防撞胶条等4部分,确保平台在使用过程中周围人员、平台本身及墙面不受损伤。
1.2 平台操作实施步骤
步骤一。液压缸伸出,平台以平时高度横移至设备上方。
步骤二。液压缸回收,平台降低,通过吊具将设备安装于机架。
步骤三。液压缸伸出,机架起升将设备起吊至距地面约0.05~0.10 m,平台行进穿过限高2.0~2.8 m的门栏及过道,将设备运往安装基础旁。
步骤四。平台将设备运至安装基础附近后,机架起升将设备起吊,使设备底面高于安装基础面0.05~0.08 m(安装基础标高0.12 m)。
步骤五。平台横移,将设备运至安装基础上方,机架下降,设备底部接触到安装基础上平面时,微动平台对设备进行找平、找正,最后将设备降落至安装基础。
步骤六。卸开设备吊具后,机架起升至横梁下沿高于设备上沿后,平台横移离开,至此,完成设备安装就位。
2 实现方式
2.1 多种行走功能的实现方式
全向轮包括轮毂和从动轮,该轮毂的外周处均匀开设3个或3个以上的轮毂齿,每两个轮毂之间装设有一个从动轮,该从动轮的径向方向与轮毂外圆周的切线方向垂直。采用麦克纳姆轮技术,四轮布局,实现全向移动,前行、后退、零半径转弯、斜行、横行,特别擅长在狭小空间运动。它主要由轮毂和具有特殊轮廓曲线的滚子组成,滚子均匀地分布在轮毂上,可以自由旋转,它的轴线与轮毂轴线成45°角,所有滚子组成的外包络线近似为一个圆(如图7)。
全向轮能够在许多不同的方向移动,左右车轮的小光盘将全力推出,但也将极大地方便横向滑动,这是建立其完整驱动器的方法,全向轮可以像一个正常的车轮或使用滚轮的锟侧向滚动。依靠4个机轮不同的方向和速度,使驱动力最终合成在任何要求的方向上,从而可以保证平台在最终合力矢量方向上能自由地移动,其运动原理如图8所示。
2.2 平台升降功能的实现方式
采用连杆机构,安装有全向轮的支腿与机架铰接连接,在支腿与机架侧壁之间铰接安装液压缸,通过液压缸的伸缩实现摆动升降臂摆动,完成平台升降[4]。用于驱动液压缸的液压系统集成安装于平台侧壁的机箱内,设置手动及遥控两种操作方式。
2.3 行走就位精度保证
每个轮子独立驱动,独立悬挂,根据国内技术水平,采用单片机控制步进电动机驱动全向轮,可使制动时间小于1 s,加减速小于2 s,运动机构能在运动过程中实现任意位置自锁,运行平稳、精确。
2.4 遥控操作方式
操控方面采用遥控操作方式,开发定制专用运动控制板卡,运动控制板卡将传来的控制信息转化为相关运动参数并依照核心算法程序解算结果调用运动函数,向步进电动机伺服驱动器发出运动控制指令,伺服驱动器根据控制指令解码成脉冲控制信号,通过编码器和放大器驱动步进电动机运行,全向轮做出相应动作。
2.5 设备安全性
设置急停按钮和停车制动装置,并在平台四周安装物理防撞条和微型红外防撞仪,防撞仪利用激光在空气中传播遇障碍物反射的原理,以激光发射/接收一体模块组为接口部件,应用单片技术计算激光波束在空气中传播的时间并处理成相应的距离,当达到警戒距离时,发出声响警报,并能够向运动控制板卡发出制动控制信息,使平台自动刹车。
3 叉车辅助作业方式
本文设计采用组合式结构,以叉车作动力,通过液压油缸驱动平台升降,实现设备快速转运、就位及找平找正。使平台安装方便快捷,连接可靠,具有成本低、应用范围广等特点。
3.1 结构组成
设计专用快速连接机构和卡具,将平台与重型设备快速可靠连接;通过特定设计升降装置驱动平台升降实现设备转运、快速装卸、就位;通过多组特种油缸和调整机构实现重型设备的找平找正[5]。
重型设备转运平台由专用卡具、固定机架、升降机构、牵引装置、脚踏油泵等部件组成。
1)专用卡具。专用卡具主要针对重型设备底座常用槽钢而设计,适用于不同型号设备底座的快速连接,拆装方便,连接牢固。
2)固定机架。固定机架选用优质合金钢加工,通过专用卡具与设备底座卡接连接,用于安装升降机构。
3)升降机构。升降机构由液压缸、支撑臂和万向轮组成。液压缸用于驱动支撑臂使万向轮移动实现设备升降,液压缸缸体中部设计有销轴与固定机架铰接连接;支撑臂通过销轴安装于固定机架,与活塞杆铰接连接。
4)牵引装置。牵引装置卡接于专用卡具,与叉车硬性连接,借助叉车动力对平台进行牵引或推动。
5)脚踏油泵。脚踏油泵通过高压软管及快速接头与液压缸插接连接,高压软管为三通形式,以保证两侧油缸同步升降。
3.2 操作实施步骤
步骤一。通过专用卡具将固定机架、升降装置安装于设备底座,通过手动油泵快速接头、高压软管连接液压缸,液压缸推动支撑臂摆动使万向轮支起,实现设备提升。
步骤二。利用叉车辅助动力牵引或推动,使设备进入安装位置,拆除牵引装置,完成设备转运。
步骤三。微调平台对设备进行找正,通过脚踏油泵驱动升降装置将万向轮收起,使设备精确降落至安装基础上方,拆除升降装置实现设备就位。
步骤四。通过多组超薄油缸和调整机构,对设备进一步找平,至此完成全部安装过程。
3.3 关键技术与解决途径
3.3.1 专用卡具设计
依据设备底座框架结构常用型钢及规格尺寸,设计成套专用卡具。使用时,将多个卡具与设备底座型钢框架连接,相当于让设备长出了“脚”。
3.3.2 行走功能设计
承载及行走方面选用8 in超重型合金芯尼龙万向轮,单体承载能力为3 t,全向轮经改造后在上方焊接支腿。
3.3.3 升降功能设计
升降功能采用由液压缸参与的折叠机构(即升降装置)来实现,主要由液压缸、定长连杆、固定机架和棘轮式自锁装置组成,如图12所示。升降装置由油缸、支撑臂和万向轮组成。油缸用于驱动支撑臂使万向轮移动实现设备升降,缸体中部设计有对称销轴与油缸座铰接连接,支撑臂通过销轴安装于油缸座,与活塞杆铰接连接。
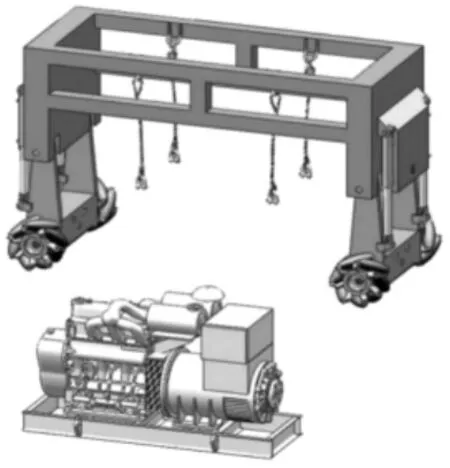
图1 液压缸伸出
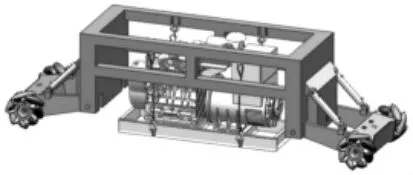
图2 液压缸回收
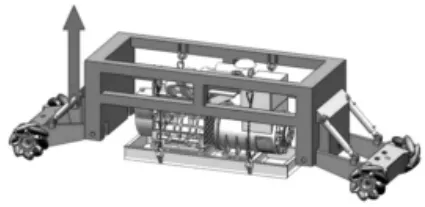
图3 机架起升
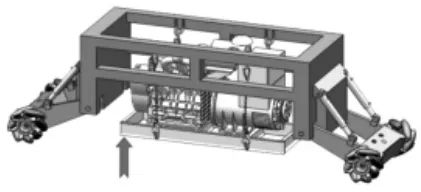
图4 设备起吊
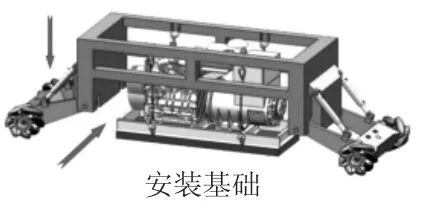
图5 平台横移
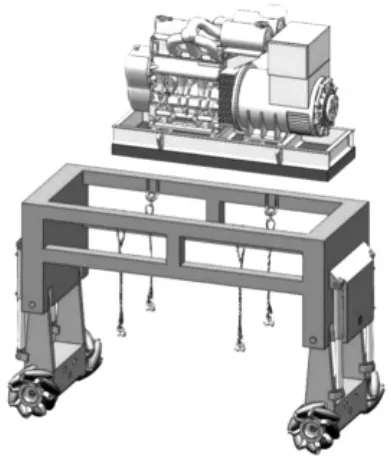
图6 安装就位

图7 全向轮实物图
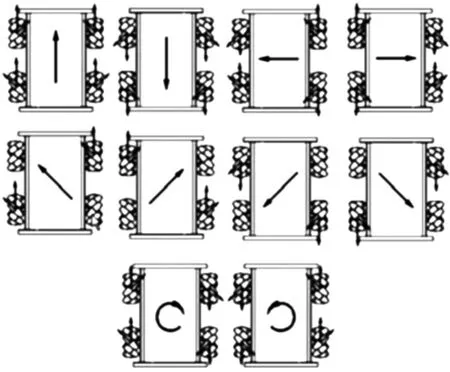
图8 四全向轮机构运动原理示意图
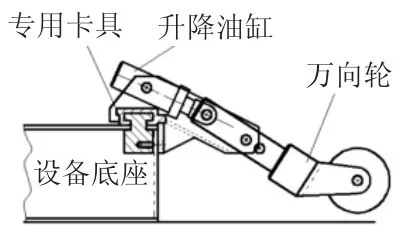
图9 设备提升
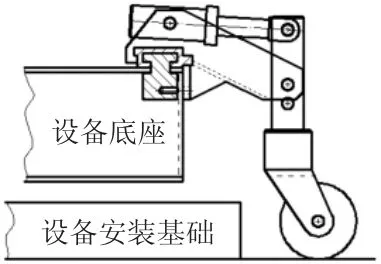
图10 设备运转
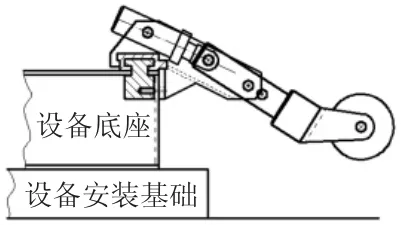
图11 设备就位
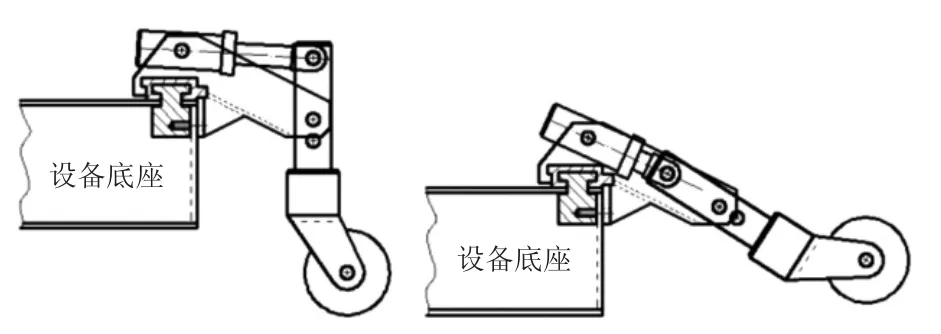
图12 升降装置
4 性能参数与主要设备选型
电动机功率为4×1500 W;最大移动速度为0.5 m/s;续航时间(满载)6 h;续航时间(空载)>12 h;驱动轮直径为300 mm;待机时间为30 h;最大自转速度为365(°)/s;加减速度时间<2 s;爬坡角度>8°;制动时间<1 s;充电器输入220 V/15 A;充电方式为AC 220 V;控制方式为无线/有线(可选);越障高度为10 mm;通信方式为蓝牙;动力方式为电动;控制精度为±1 mm;供电方式为蓄电池/外接电缆;制动方式为停车制动、电动机制动;导航方式为人工控制;安全措施为距离感应、急停开关。
5 结语
本文针对重型设备转运安装平台安装受场地条件限制、不适宜起重吊装设备等问题,研究设计了基于全向轮驱动的重型设备转运安装平台,确定了液压泵站、油缸、行走机构、全向轮、调整装置、升降装置及卡具的规格型号、连接方式、安装形式等。设计平台由机架、升降动力舱、行走动力舱、摆动升降臂、全向轮、液压缸、吊具、操控设备、主被动安全装置等部件构成,同时完成了结构设计计算。分析了平台操作实施步骤,该平台可实现快速装载、转运、就位及找平找正,提高设备转运安装自动化程度,降低安全隐患,提高施工效率。
