基于模拟退火算法的数控机床热误差补偿方法
2023-12-29蔡杨王春飞钱小勇
蔡杨,王春飞,钱小勇
(1.浙江永成机械有限公司,浙江 诸暨 311835;2.华北电力大学 能源动力与机械工程学院,北京 102206;3.浙江盾运实业有限公司 生产技术部,浙江 诸暨 311835;4.浙江豪路热能科技有限公司 生产技术部,浙江 诸暨 311835)
0 引言
数控机床是机械加工的基础,可以直接决定一个国家的制造业水平。进入21世纪以来,几乎所有的机械制造技术都向着高精密加工的方向发展,数控机床的加工精度成为了研究者的重点研究对象。在数控机床加工精度误差中,热误差是最大的一个阻碍。为了减小精密加工过程中的热误差,研究人员纷纷对数控机床的热误差补偿方法进行设计。李国龙等[1]使用天鹰优化卷积神经网络算法,对精密数控机床的热误差进行建模分析,在总结了系统的热变形规律之后,筛选出关键的温度点,并提出优化的卷积核结构,建立了一个热误差的预测模型,基于该模型建立的补偿机制可以有效地提高补偿精度。曹利等[2]使用MEA-BP算法对数控机床的加工主轴进行了优化,总结了温升条件与热误差之间的关系,同时结合实验,验证了该方法在不同的工况下均具备较好的补偿精度与泛化能力。李有堂等[3]以提高数控机床精度为目标,结合布谷鸟算法,转化了高维线性问题的求解思路,在最小二乘支持向量机的建模方法下,完成了对最小化线性规划的分析。该方法具备良好的预测效果,同时可以高效地补偿数控机床的热误差。综合上述文献的研究,为进一步提高数控机床的热误差补偿精度,本文设计了一种基于模拟退火算法的数控机床热误差补偿方法。
1 计算高速运动机床发热量
在多体运动过程中,分别求解平移运动和旋转运动所对应的齐次坐标变换矩阵。在沿X轴、Y轴、Z轴方向做平移运动时,矩阵P(x)、P(y)和P(z)可以表示为:
该矩阵中,x、y、z均可以表示为平移运动下物体的变化量[4-5]。旋转运动时的齐次坐标变化矩阵则可以简化为
式中:XT为物体作旋转运动时的齐次变化矩阵,αx、αy和αz分别为X轴、Y轴、Z轴下物体的旋转角度[6-7]。
在数控机床内,通过位姿误差和运动误差计算加工机床的几何误差,其中的位姿误差不会跟随零件运动而发生位置的偏移。在此过程中,电动机与轴承的发热量为:
式中:Qd为电动机的发热量;Qz为轴承的发热量;Pk为电动机内部磁极数量,该磁极一般成对出现;n为电动机主轴的转动速度,r/min;tm为电动机运行的转矩;δs为电动机运行功率;Jk为电动机与轴承的摩擦力矩[8]。
将电动机与轴承的发热量相加,就是高速运动下该数控机床的发热量。
2 基于模拟退火算法建立热误差偏移补偿模型
想要获取最佳的热误差补偿结果,就需要建立一个热误差的补偿模型。结合模拟退火算法,在该模型内选择一个热平衡状态,此时系统温度的状态参量可以表示为
式中:P(Tm)为该热平衡状态下的系统温度参量,G(Tm)为系统热平衡转移情况下的状态函数,xk为温度系数[9-10]。
在温度下降后,得到求和单元的传递函数:
式中:Uk和Ud分别为求和单元内模式层及计算层内的加权求和结果,Pi为第i个样本的输入值,Fi为连接权值。当模拟退火算法的粒子进入平衡状态后,可以得到固化后的最低能量晶体,此时的热误差偏移补偿模型的状态转换一般能够得到大于1的数值,其计算公式为
式中:Gm为热误差偏移补偿模型在转换条件下的状态参量,F(i)为转移前的状态函数,F(j)为转移后的状态函数,Dk为能量粒子的平衡常数[11-12]。
由此可以得到该偏移补偿模型内X轴、Y轴、Z轴上经过多次迭代后的位置:
式中:Dx为X轴方向上数控机床经过热误差补偿后的位置,Dy和Dz分别为Y轴与Z轴的补偿后位置,c1和c2分别为智能体的光滑因子和泛化因子,Xi(t)和Xj(t)分别为补偿前X轴的位置与补偿变化值,Yi(t)为补偿前Y轴的位置,Yj(t)为补偿后Y轴变化值,Zi(t)和Zj(t)则分别为补偿前Z轴的位置与补偿变化值[13-14]。
通过式(9)可以获得基于模拟退火算法的热误差偏移补偿模型。
3 设计数控机床热误差补偿算法
结合上文中针对数控机床的热误差偏移补偿模型,可以设计一个热误差补偿算法,该算法的流程如图1所示。
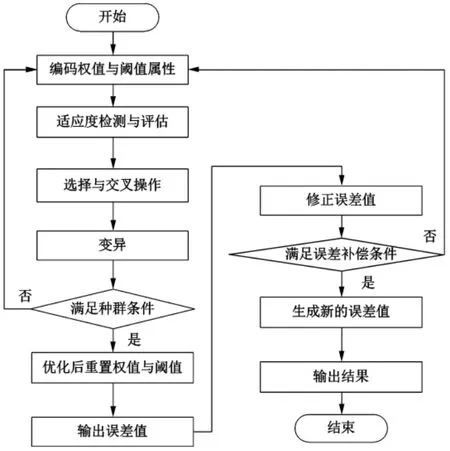
图1 热误差补偿算法
如图1所示,通过权值与阈值的编码,可以得到一个适应度评价结果,将其与检测结果进行对比与评估,然后进行选择与交叉操作。变异后,检查该误差补偿算法得到的结果是否满足种群条件,如果不满足条件,需要重新进行权值与阈值的编码,但是如果满足条件,则可以对充值后的权值与阈值进行优化处理。此时可以输出并修正基础误差。判断是否满足误差补偿条件,若不能满足补偿的基础条件,需要重新返回到权值的编码及阈值重构的环节,继续优化误差[15]。当满足误差补偿条件后,可以继续生成新的数控机床热误差补偿值,并将该补偿值作为输出结果。由上述流程内的数控机床热误差补偿算法可以得到数控机床热误差补偿结果。
4 实验研究
4.1 搭建测试平台
本文设计了一种基于模拟退火算法的数控机床热误差补偿方法,为测试该方法的实用性及优越性,设计了实验方案。该实验使用MIK-R6000F系列的无纸记录仪作为多通道数据采集仪,该型号的配电输出为150 mA,内部存在通信接口和USB数据转存接口,通过USB接口与计算机相连,可以在稳定的环境下收集数控机床的数据。标准球目标的使用规格为25.4 mm,使用高精度的标准球目标并将其固定在轴端的两侧,从而实现热位移的测量。位移传感器则使用PZ11系列微型拉杆式位移传感器,该传感器的最高运行速度可以达到5 m/s,运行寿命能够达到1000万次以上,位移测量精度为0.1%。在搭建热误差模型的过程中,依据传感器的布置原则,以此得到数控机床热误差补偿测试时所适用的传感器位置(如图2)。
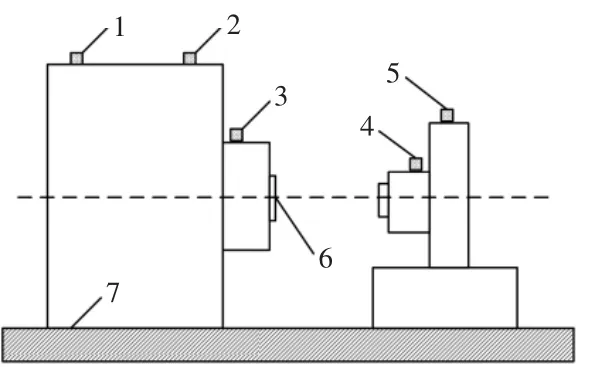
图2 传感器位置
如图2所示,1~4号位置分别为编号为001~004的传感器,5号位置为数控机床主轴,6号位置为位移传感器,7号位置为机床的支撑座。
4.2 模型优化结果
收集上述测试平台中的100组数据,并将其分为2个部分,分别作为测试集和训练集。其中训练集为70 组数据,测试集为30组数据。该模型的学习效率为0.01,误差平方和的指标为0.001,最大迭代次数为160。此时可以得到该模型的适应度曲线和误差平方和曲线,如图3所示。
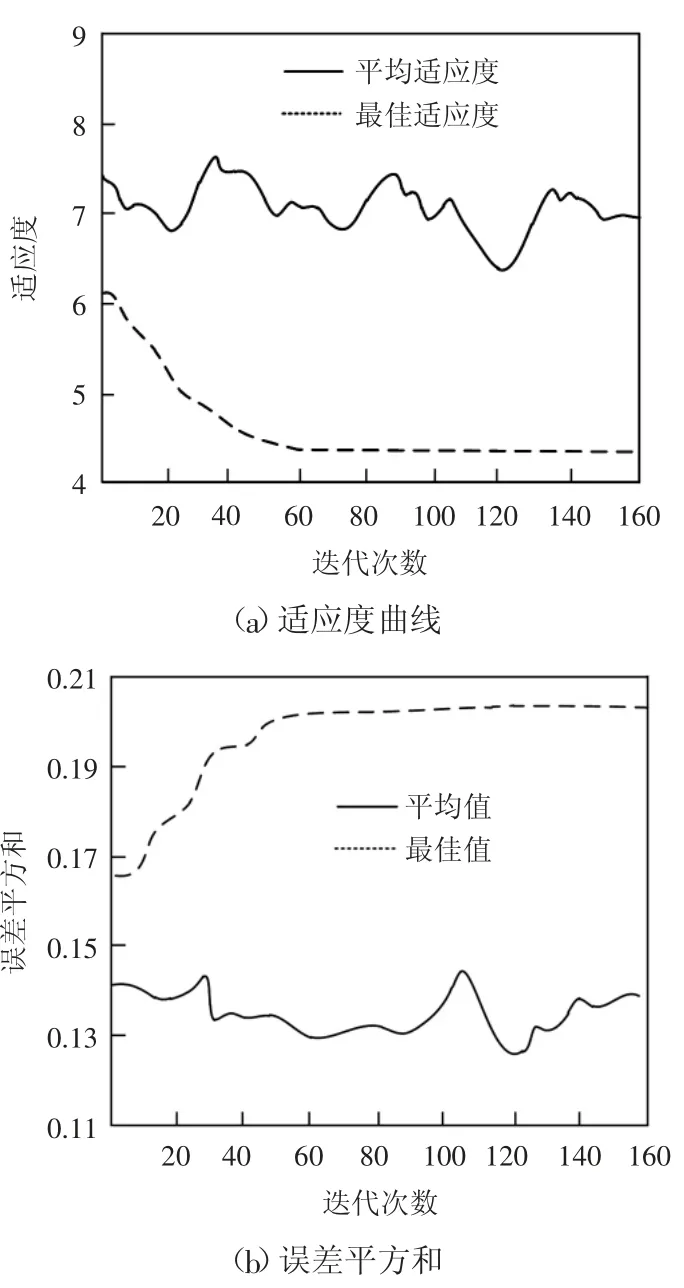
图3 模型优化结果
在适应度曲线中,最佳适应度在第60次迭代以后趋于平缓,此时的适应度值约为4.5,而平均适应度则在6.5~8之间。在误差平方和的测试中,最佳值同样在第60次迭代时变得平缓,此时的误差平方和约为0.20。误差平方和的平均值则在0.13~0.15之间。两种模型的优化结果波动均较小,可见该数控机床热误差补偿模型的稳定性较强。
4.3 热误差补偿精度对比
在400 min内分别测试数控机床热误差补偿在X轴、Y 轴、Z 轴上的热变形量,以0 mm为标准值,分别记录3组变形数据随时间变化的曲线。
如图4所示,通过温度传感器可以得知,该数控机床在轴方向的热变形量先增加、后减少,呈现一个明显的先上、后下的坡度。Y轴方向的热变形量则是基本与标准值相贴近,没有过多的差距。Z轴方向的热变形量变化趋势较为复杂,但是基本处于标准值的下方。根据图4中的热变形数据可知,在该数控机床中,X轴与Z轴方向的热变形最明显,因此可以据此对2组数据建立热误差的补偿模型:
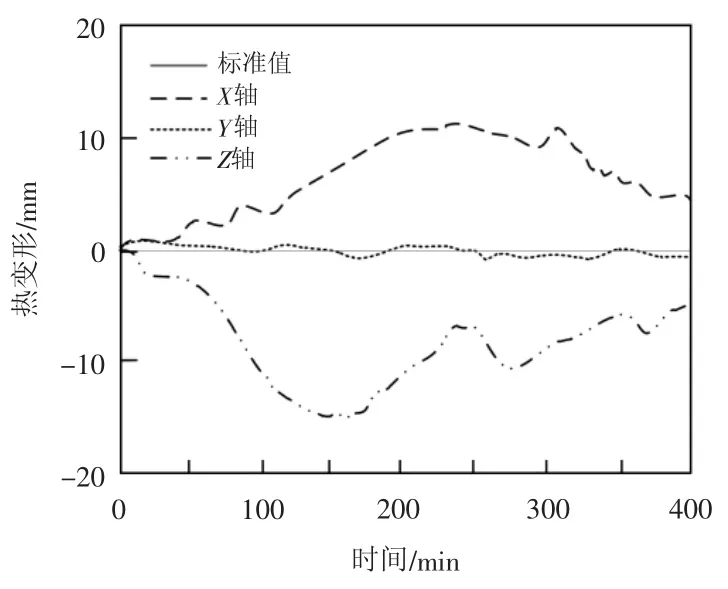
图4 热变形数据
式中:ΔX为X轴数据的补偿值,ΔZ为Z轴数据的补偿值,f1、f2和f3分别为3个轴型对应的模型系数,Tx1和Tx2为X轴上的两组测点温度,Tz1和Tz2则分别为Z轴上的测点温度。
在本实验中,分别对本文设计的模拟退火算法、天鹰优化卷积神经网络 算 法 、MEA -BP 算法和优化最小二乘支持向量机方法进行对比测试。通过该补偿模型,分别得到4种方法在热误差补偿前后的实测曲线,如图5所示。
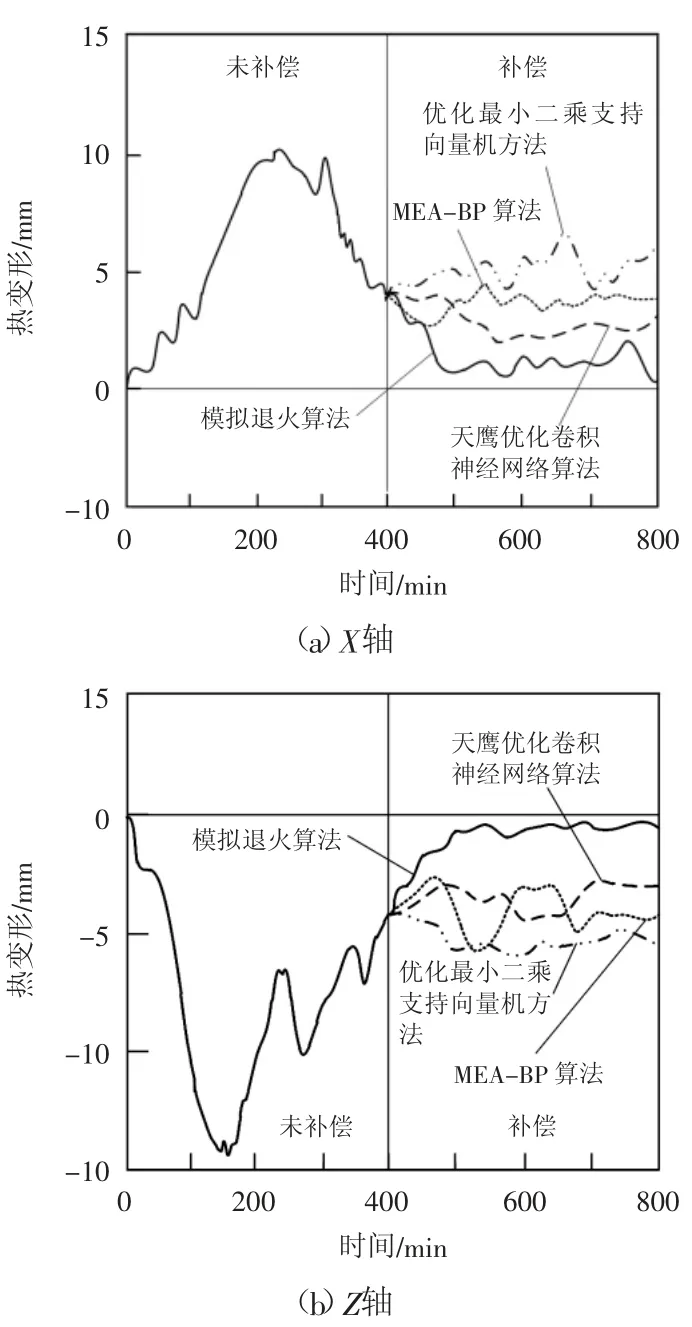
图5 热误差补偿前后对比实测曲线
在X轴上,经过热误差补偿后,4种算法的热变形量有明显降低。其中本文设计的模拟退火算法的热变形量由补偿前最大的形变量10 mm降低至补偿后的1~2 mm。在热误差补偿后,天鹰优化卷积神经网络算法的热变形量为2~4 mm,MEA-BP算法和优化最小二乘支持向量机方法的热变形量分别为4~5 mm和4~7 mm。在Z轴上,补偿前的变形量最高可以达到14 mm,但是在经过数控机床的热误差补偿后,模拟退火算法所得到的补偿值已经降低至0~1 mm,鹰优化卷积神经网络算法的热变形量也降低至2~4 mm,MEA-BP算法和优化最小二乘支持向量机方法的热变形量分别降低至2~5 mm和4~6 mm。通过上述实验结果可知,在上述4种数控机床热误差补偿算法中,本文设计的模拟退火算法得到的热变形量下降幅度最大,能够在最大程度上降低数控机床的误差,保证机床运行的精度。
5 结语
本文设计了一种基于模拟退火算法的数控机床热误差补偿方法,该方法可以通过建立热误差模型,得到相应的补偿算法,实验结果显示该补偿方法的效果极好,比其他3种对比方法的补偿精度更好。通过该方法可以得到精度更高的机械加工产品。本文设计的加工机床仅对有热误差导致的加工误差进行了消减,对其他方面的误差没有深入的研究。除了热误差之外,机床加工的精度还会受到几何误差、力致误差等的影响,因此需要分别对各类误差进行溯源整理,并进一步提高数控机床的加工精度。
