双光载荷光电吊舱系统设计与研究
2023-12-29张海娜刘欢欢苏建华
张海娜,刘欢欢,苏建华
(天津航天中为数据系统科技有限公司,天津 300458)
0 引言
光电吊舱是无人机常用的挂载设备,光电吊舱技术是无人机技术领域中的重要组成部分,更是无人机侦察的核心装备,光电吊舱可以搭载多种载荷作业,应用于林业、交通、海上监测等各个领域[1-3]。双光载荷光电吊舱采用两轴两框架的结构形式,配置可见光摄像机和红外热成像仪。通过陀螺稳定平台,有效隔离无人机的各种振动、起伏和颠簸,使任务载荷在空间内保持稳定,消除图像抖动,满足使用需求,本文从功能设计、系统组成及详细设计方面对两轴两框架吊舱设计方法进行了详细的介绍,为吊舱设计提供了一种方法和依据。
1 系统设计
1.1 功能设计
光电吊舱实现的主要功能要求如下:可对目标区域进行高清可见光摄像、红外成像;能实时输出可见光视频和红外原始视频;能实时输出吊舱相对载机的姿态参数和吊舱工作状态等遥测信息;能够实时接收控制命令,完成传感器切换、调焦、工作模式设定等相应操作;红外视频图像下传到地面后,依据操作人员指定的目标,吊舱能够对其进行锁定和自动跟踪;吊舱全部控制指令均可以通过软件进行控制,并且有状态回报显示。
1.2 系统组成
光电吊舱具体包括机械结构组件、硬件及软件、任务载荷和内部元器件等部分。机械结构组件中又包含方位框架、俯仰框架和减振器及支架等,硬件包含电源模块、驱动模块等,软件主要包含了嵌入式的软件和上位机操控软件,内部载荷包含了可见光摄像机和红外成像仪,内部的测角元件包含陀螺、旋转变压器,还有能保证方位框架360°旋转的滑环等元器件,光电吊舱组成如图1所示。方位基座位于最上方,内部主要包含方位电动机、方位旋变、导电滑环、轴承及连接结构件,通过俯仰U形支架将方位基座与俯仰框架连接,俯仰U形支架两侧设计有俯仰电动机、驱动器、旋变及电源模块等。俯仰球体内部有可见光摄像机载荷、红外成像仪载荷、伺服控制板、电源板、陀螺模块及连接结构组件。在方位电动机旋转时,带动整个俯仰框架完成方位方向的转动。俯仰电动机旋转时,带动俯仰球体沿着俯仰方向回转一定的角度。
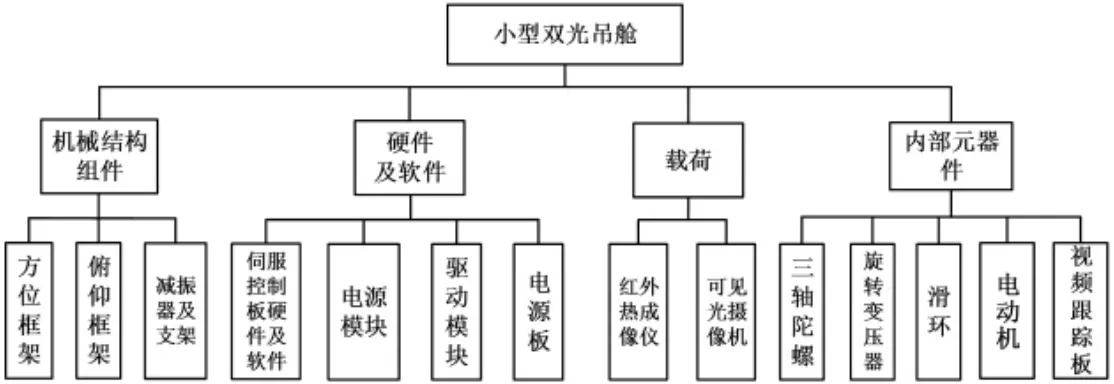
图1 光电吊舱组成图
1.3 机械结构设计
光电吊舱采用两轴两框架结构,主框架主要包括方位基座组件、俯仰支架和俯仰组件3部分。方位基座组件中方位轴系带动俯仰支架做方位回转运动,俯仰支架作为俯仰轴系和俯仰组件的支撑框架,在方位电动机驱动下带动俯仰部分跟随方位轴完成方位方向的旋转[4-5]。方位轴系包括方位旋变、方位电动机、方位深沟球轴承、方位轴、方位滑环及其他连接件。其中,方位滑环实现方位基座组件与俯仰组件之间的电气连接,保证方位可以360°连续旋转。俯仰轴系包含俯仰电动机端模块和俯仰旋变端模块,分别安装在俯仰支架的两侧,吊舱结构连接如图2所示。俯仰轴系与中间的俯仰球组件连成一体,在俯仰电动机驱动下,完成俯仰方向的回转运动。俯仰旋变端模块包含俯仰旋变、轴承、俯仰旋变轴和一些连接零件,采用双轴承的结构形式可以有效避免轴承游隙带来的轴系晃动,提高光电吊舱的性能。俯仰电动机组件包含俯仰电动机、轴承、俯仰电动机轴和一些连接零件。
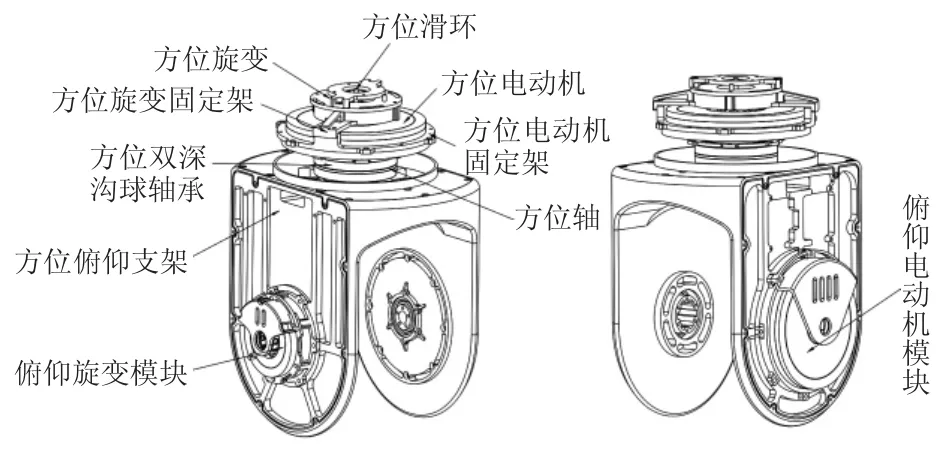
图2 吊舱结构连接图
俯仰电动机和方位电动机都采用了直接驱动的力矩电动机,电动机定子安装在固定架上,电动机转子通过转轴和轴承结构连接,转子转动的同时带动转轴沿俯仰方向转动,电动机端的俯仰轴和旋变端的俯仰轴同时与俯仰球体的两侧板相连,当电动机转动时,带动俯仰球体转动,旋变同时转动,信号通过旋变解码板进行解码后回传到控制板,进行旋转角度信息回传和控制。俯仰球体组件主要包含光电传感器(红外和摄像机)、伺服控制单元、陀螺模块、电源转换模块、连接件及包裹在最外层的球形外壳,球壳上设计有红外视场窗口和可见光视场窗口。
1.4 接口设计
光电吊舱接口主要包括电源接口、通信接口、视频接口等。无人机为光电吊舱(包括内部载荷)提供供电,通信接口用于接收伺服控制指令和返回光电吊舱的姿态参数、摄像机工作状态参数等;视频接口为1路可见光视频的接口和1路输出红外视频的接口,光电吊舱外部接口设计如图3所示。
2 信号控制设计
机载电源通过导电滑环输入到两个电源模块,大电源模块连接方位、俯仰电动机驱动器,驱动方位和俯仰电动机运动。小电源模块连接电源板进行电压转换输出后接入伺服控制板;伺服控制板为可见光摄像机、红外热成像仪、方位和俯仰旋变解码模块和陀螺模块提供电源;可见光摄像机视频输出接口通过一分二转接头,一路接导电滑环与外部连接,一路接视频跟踪板进行视频跟踪。红外热成像仪模拟视频输出接口连接视频跟踪板,视频跟踪板的视频输出接口通过导电滑环与外部连接,可选择输出可见光或红外跟踪视频;方位驱动器通过导电滑环与方位电动机连接。方位旋变通过导电滑环与俯仰框架上的旋变解码模块通信,伺服控制板采集陀螺模块数据、方位、俯仰旋变解码模块数据[6]。光电吊舱内部主要元部件信号连接如图4所示。
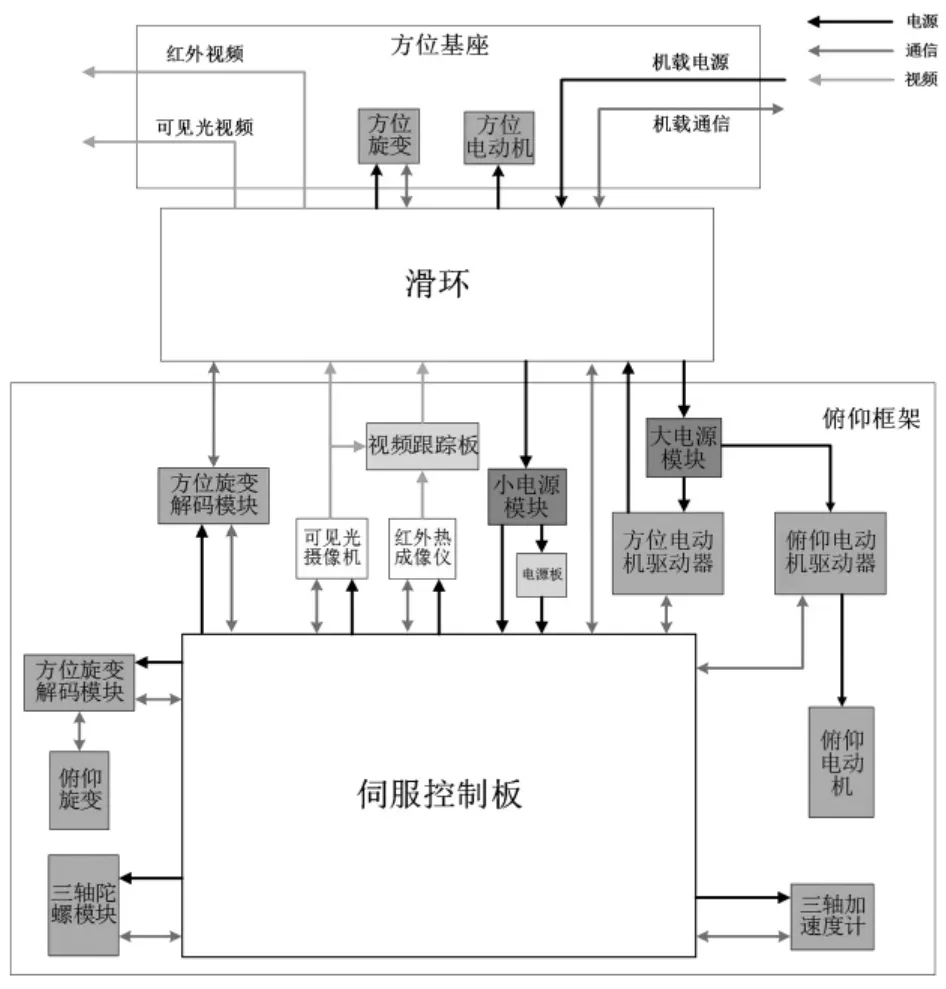
图4 主要元部件信号连接图
光电吊舱的伺服控制系统通过陀螺稳定控制,消除无人机机体摇摆和振动对稳定平台所搭载的光电载荷的影响,使其成像稳定,保证稳定平台可以对目标实施有效的搜索和监控。光电吊舱伺服控制系统共有两个控制回路,即方位控制回路、俯仰控制回路,分别用于完成光电吊舱的方位、俯仰转动控制,均采用高速响应的电动机驱动,实现高精度陀螺稳定。控制回路组成框图如图5所示。稳定平台系统各工作模式下的方位、俯仰回转是通过伺服系统完成的,系统中每个控制回路均采用双闭环设计方案,其中包括速度稳定环路和位置稳定环路[7-8]。
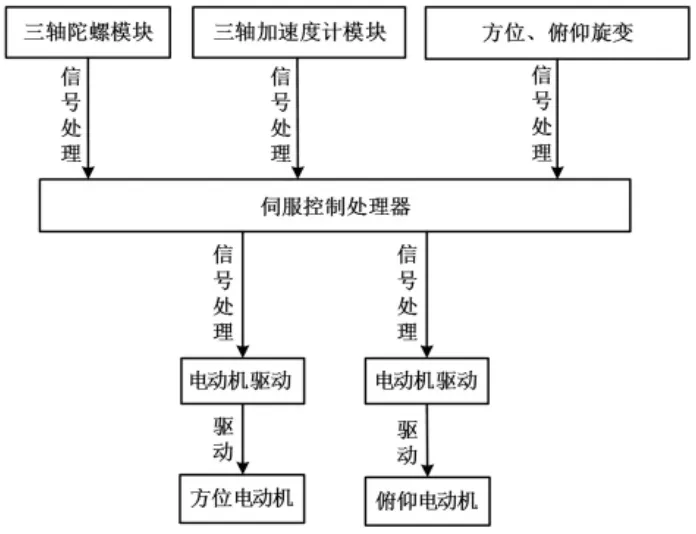
图5 稳定控制组成框图
系统软件设计主要包括伺服控制模块和信号采集模块软件设计。伺服控制模块作为系统的主控制器完成整个系统的控制和管理,信号采集模块采集角速度信息、角加速度信息、旋转变压器角度位置信息,并完成控制相机工作模式的动作指令。光电吊舱伺服控制器完成系统初始化,获取外部控制指令并解析,获取旋转变压器角度位置信息、陀螺速度信息进行解耦,完成位置环和速度稳定环计算输出,定时向地面设备发送光电吊舱的状态信息的功能。
3 稳定精度试验分析
利用六自由度摇摆台和搭建的光路系统与光点位置检测设备,采用基于光点位置检测稳定精度的检测方法[9],检测现场如图6所示。检测步骤如下:将待检样品安装在挂载装置上,并将挂载装置固定于振动台台面。对系统进行初始对准,将反射镜安装在惯性载荷的照准架上,通过调节可移动底座并使用快速调节装置使光电自准直仪发射光束在反射镜的几何中心位置,以保证测试过程中入射光点始终落在反射镜上,使反射光束在光电自准直仪物镜中心点位置附近,以确保检测光点的晃动落在接收度较好的区域。启动稳定精度分析软件,观察软件界面上坐标输出,并调节调整台,直到两个坐标显示都为0,把此时的系统状态定为初始状态,将试验样品通电,开启稳像功能。按照无人机飞行运动谱线进行摇摆和振动试验。使用稳定精度分析软件采集光点位置坐标[10],实时显示光点移动轨迹曲线,并通过统计学算法分别计算惯性载荷视轴二维方向稳定精度,最终计算出惯性载荷稳定精度符合设计需求。
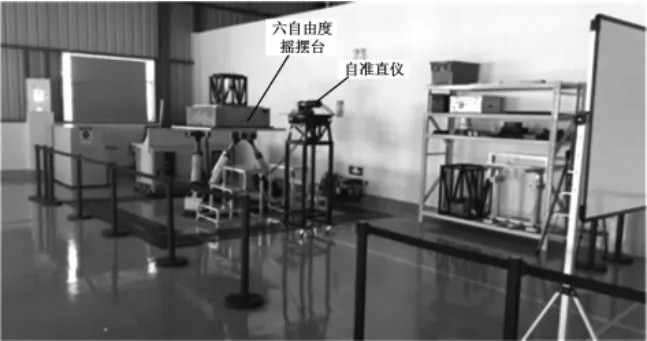
图6 稳定精度检测现场图
4 结论
光电吊舱作为无人机领域的必备产品,在多个领域发挥着越来越重要的作用,针对功能设计要求,对吊舱的机械结构、接口、软件控制等进行了设计,最终吊舱通过稳定精度测试,吊舱已经得到了工程应用,实际挂载飞行效果良好,该吊舱系统的设计方法可以为此类吊舱的设计提供部分设计依据。
