基于线性自抗扰控制的无线电能恒压无通信传输方法
2023-12-28彭思敏张慧成吴铁洲
彭思敏,张慧成,吴铁洲,田 勇
(1.湖北工业大学太阳能高效利用及储能运行控制湖北省重点实验室,武汉 430068;2.盐城工学院电气工程学院,盐城 224051;3.深圳大学物理与光电工程学院,深圳 518060)
无线电能传输WPT(wireless power transfer)技术通过电磁耦合将能量从电源传输到负载,相较于传统插入式供电方式更加安全、便捷[1],已经广泛应用在电动汽车[2]、便携式设备[3]和嵌入式医疗等领域[4]。在实际应用中,用电负载通常要求WPT 系统具备稳定高效的传输性能,这已成为国内外专家学者的研究热点之一。
目前关于保证WPT 系统稳定高效传输性能的研究,主要从WPT 系统恒压或恒流输出控制和提高传输效率两个方面着手。关于恒压或恒流输出控制方面,文献[5]针对单一补偿拓扑无法实现恒压恒流的切换问题,提出了一种变结构的补偿网络,实现负载WPT 系统的输出电压或电流与负载解耦控制;文献[6]提出了一种频率切换的方法,实现了系统输出电压或电流与负载解耦,但频率易受线圈参数漂移的影响,降低传输效率。此外还有模型预测控制[7]、滑模控制[8]、线性自抗扰控制[9]等方法,通过控制DC-DC 电路占空比或全桥逆变电路的移相角来实现恒压或恒流输出。
在传输效率控制方面,大量研究成果表明,WPT 系统传输效率主要受负载变化和工作频率的影响[10-11]。文献[12]采用双端DC-DC 控制方法,使系统工作于恒压、高效状态,但其最佳阻抗值与互感相关,需要额外的互感估算电路,同时,输入、输出两端需要无线通信来保证输出电压恒定,增加了系统的不稳定性及系统体积;文献[13]提出一种输出端采用半控整流电路、输入端搜索最小输入电流的方法,使系统工作于恒流高效状态,该方法在输入、输出端无需通信,但其PI 控制器易外界扰动影响。
针对上述问题,本文提出基于线性自抗扰控制的无线电能恒压高效无通信线传输技术方法,即在WPT 系统输出端采用基于线性自抗扰控制LADRC(linear active disturbance rejection control)的同相移相半控整流电路,以实现系统输出电压恒定,同时,系统输入端采用扰动观察法寻找最小输入功率,并利用基于锁相环跟踪谐振频率的双端协同控制策略,实现系统输入、输出两端无需通信控制,保证了WPT 系统的恒压输出、高效传输运行的可靠性。
1 串-串补偿的WPT 系统及工作原理
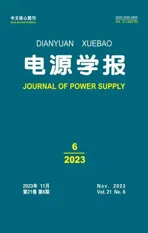
图1 为所提串串S-S(series-series)补偿型WPT系统结构,主要由输入端、输出端及S-S 补偿电路三部分组成,其中,输入端由BUCK-BOOST 电路和全桥逆变电路组成,输出端由半控整流电路组成,S-S 补偿电路由发射线圈与接收线圈均串联一个电容与一个电阻构成。图中:L1和L2分别为发射线圈和接收线圈自感;M 为发射线圈和接收线圈互感;C1和C2分别为发射线圈和接收线圈的补偿电容;R1和R2分别为发射线圈和接收线圈的电阻;RL为负载电阻;Re为半控整流电路输入等效阻抗;ω 为电路的工作角频率,ω=2πf。
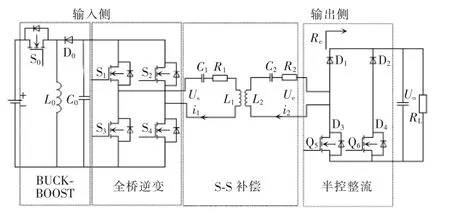
图1 S-S 型WPT 系统Fig.1 S-S type WPT system
图1 中,由基尔霍夫电压定律1 得发射回路和接收回路的电压方程为
若忽略半控整流的功率损耗,发射回路和接收回路的阻抗Z1和Z2可表示为
由式(1)和式(2)可得系统的传输效率为
式中:Pin为发射端的输入功率;Po为接收端的输出功率。
由式(3)可知,当WPT 系统的参数一定时,其传输效率主要受到负载和工作频率的影响。本文所设计的WPT 系统的参数如表1 所示。
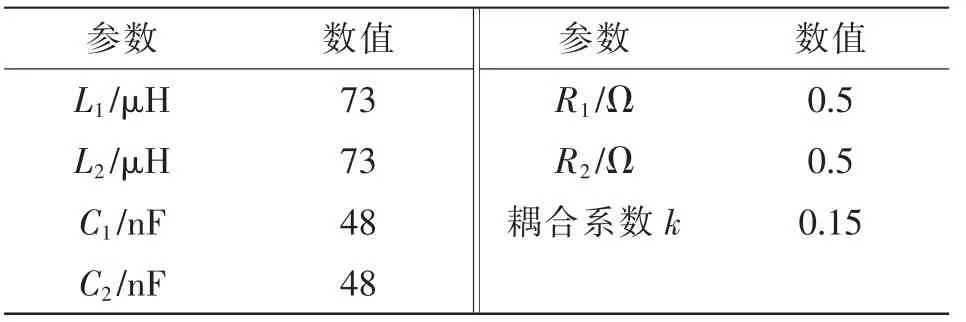
表1 WPT 系统参数Tab.1 Parameters of WPT system
系统传输效率与负载和工作频率的关系如图2所示,当系统工作频率为谐振频率时,WPT 系统工作于传输效率较高的状态,因此,需对系统的谐振频率进行跟踪控制。
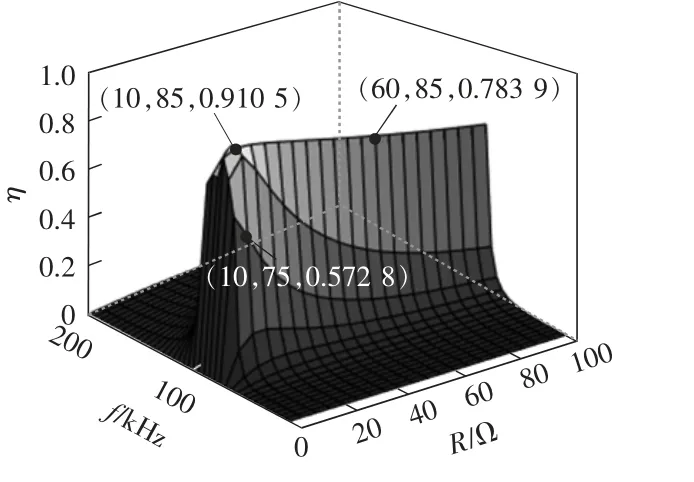
图2 传输效率与负载和工作频率的关系Fig.2 Relationship between transmission efficiency and load working frequency
与此同时,为了实现输入端与输出端两端间无需通信,降低系统的复杂度,对输出端进行独立的稳压控制,通过输入端控制来实现最优效率跟踪。当负载阻抗一定时,此时若输出端输出电压保持恒定,则输出端的输出功率恒定。又由η=Po/Pin可知,当Po一定时,输入端的控制器使得输入功率处于最小,即可实现系统最佳传输效率。
2 输出端恒压输出与输入端最优效率跟踪协调控制策略
2.1 基于LADRC 的系统输出端恒压控制策略
目前在WPT 系统中输出电压控制主电路常采用不可控整流电路加DC-DC 变换器的电路结构,但其结构复杂、功率损耗大,为此,本文在输出端采用了半控整流电路。在半控整流电路中,传统的移相方法易使半控整流电路输入阻抗呈现非纯阻性,从而使传输效率降低[14]。本文所采用的移相控制方法保证了半控整流电路的输入阻抗呈纯阻性,并通过LADRC 方法控制半控整流电路的移相角,可提高WPT 系统抗扰动能力。
2.1.1 半控整流电路
半控整流电路结构如图1 所示,通过改变开关器件Q5和Q6的导通时间来改变移相角β,从而对输出电压进行控制。
设Ue为半控电路的输入基波电压有效值,Uo为输出直流电压,二者关系为
半控整流电路移相工作时一个周期内的电压工作波形及其驱动信号如图3 所示,图4 为次级通过LADRC 控制器控制WPT 系统恒压输出的过程,以及驱动半控整流电路的信号生成过程。
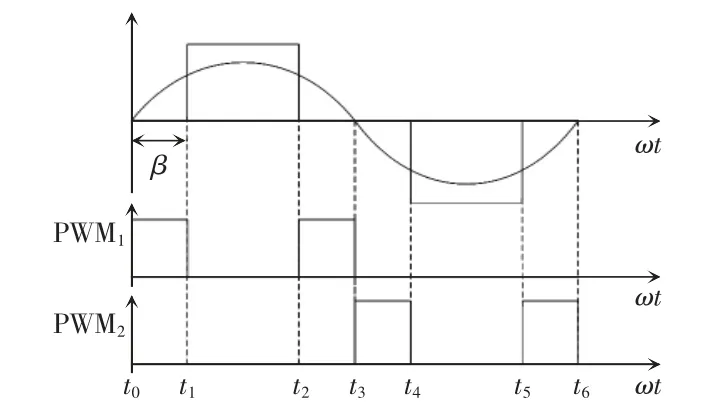
图3 工作波形及驱动信号Fig.3 Working waveform and driving signal
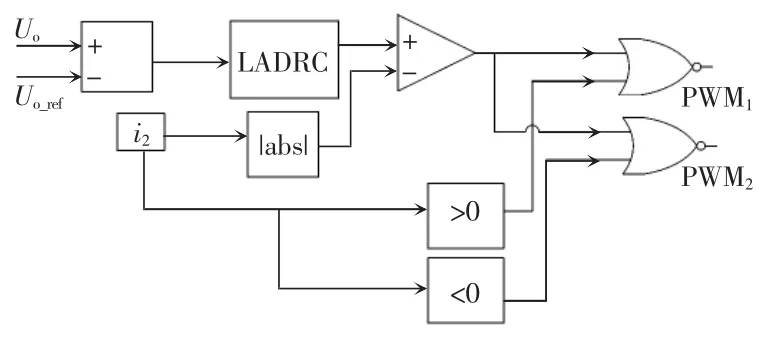
图4 PWM 信号生成过程Fig.4 PWM signal generation process
2.1.2 LADRC 控制器设计
本文所采用的自抗扰控制是一种不依赖于对象模型的控制算法,将单输入单输出WPT 系统[15]视为
式中:y 为系统输出;u 为系统控制量;f(y,w,t)为包含系统外界扰动w 的总扰动;b0为控制输入增益估计值。
一阶LADRC 的控制结构如图5 所示,一阶LADRC 由线性扩张状态观测器LESO(linear extended state observer)、线性误差反馈LSEF(linear state error feedback)控制率以及扰动补偿项组成。
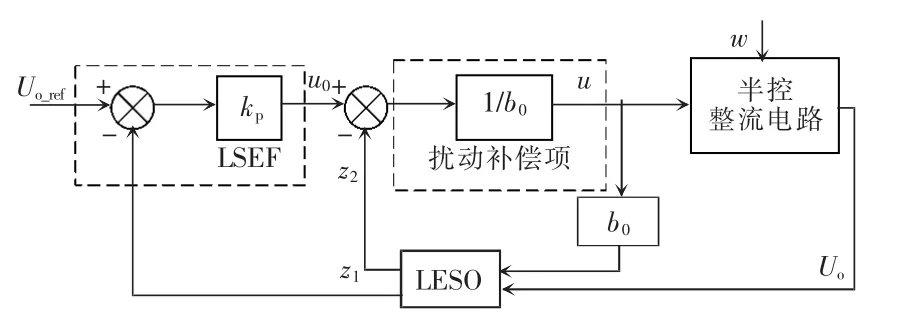
图5 一阶LADRC 控制结构Fig.5 First-order LADRC control structure
LESO 将所观测到的总扰动送到线性误差反馈控制环节,需要将总扰动扩张成WPT 系统的一个新的状态变量并对其进行估计。LESO 的状态方程表达式为
式中:z1为WPT 系统输出电压估计值;z2为WPT 系统总扰动估计值;β1和β2为系统状态误差反馈增益,按带宽整定法[16],β1=2ω0,β2=,其中ω0为LESO带宽。
采用LSEF,将输出电压的参考值Uo_ref与LESO的输出z1的差值作为反馈控制量,则LSEF 的输出为
式中:u0为LSEF 的输出;kp为比例控制器的增益,依照带宽整定法kp取值为控制器的带宽ωc。
传统PI 控制器通过积分消除系统误差,会降低系统的稳定性,一阶LADRC 利用LESO 对广义扰动实时补偿,可有效规避积分环节带来的影响。通过LESO 估计系统的总扰动,并对u0进行补偿形成新的控制量u,即
2.2 输入端最大效率跟踪控制策略
2.2.1 频率跟踪策略
本文基于锁相环实现系统的频率跟踪,依靠锁相环的调节作用来实现谐振系统发射电路中的电压和电流同相。锁相环的工作原理如图6 所示。锁相环由鉴相器、环路滤波器和压控振荡器组成。
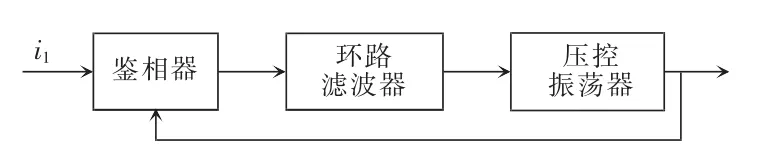
图6 锁相环工作原理Fig.6 Working principle of phase-locked loop
2.2.2 基于扰动观察法的最小输入功率跟踪
当工作于谐振状态下WPT 系统的输出电压恒定后,为达到最大传输效率,在输入端采用扰动观察法控制BUCK-BOOST 电路占空比,从而控制系统的输入功率,使系统的输入功率最小。扰动观察法通过采集逆变电路的输入电压、电流,从而得到逆变电路的输入功率,再通过对BUCK-BOOST 电路的占空比进行扰动,从而寻找到WPT 系统的最小输入功率。设BUCK-BOOST 电路的初始占空比为D0,扰动观察法的步长为ΔD,记录逆变电路的初始输入功率Pin0,具体工作流程如下。
步骤1通过扰动观察法调整占空比D。D 增大,则D1=D0+ΔD;D 减小,则D1=D0-ΔD,并记录此时的输入功率Pin1。
步骤2通过扰动观察法控制器比较Pin0和Pin1。若Pin1<Pin0,则沿占空比变化方向继续调节D;若Pin1>Pin0,则沿占空比变化反方向调节D。
步骤3重复步骤1 和2,直至寻找到最小输入功率Pin。
2.3 双端协同控制策略
WPT 系统的整体控制框架如图7 所示,双端协同控制策略的工作原理如图8 所示。首先,需要通过输入端的锁相环确定系统的工作频率,使WPT 系统始终工作于谐振状态;其次,输出端的LADRC 控制的半控整流电路会调节WPT 系统的输出电压恒定,输入端的扰动观察法开始对占空比进行扰动,扰动观察法占空比每变化一次,输出端的LADRC 就会调节一次半控整流电路的移相角,保证系统的输出电压恒定;最后,比较输入功率,通过比较结果确定下次占空比的变化方向,直至找到最小输入功率。如若负载发生变化,则在谐振工作频率下重新进行搜索过程。至此,在双端协同控制下完成了WPT 系统的高效传输和恒压输出的控制目标。
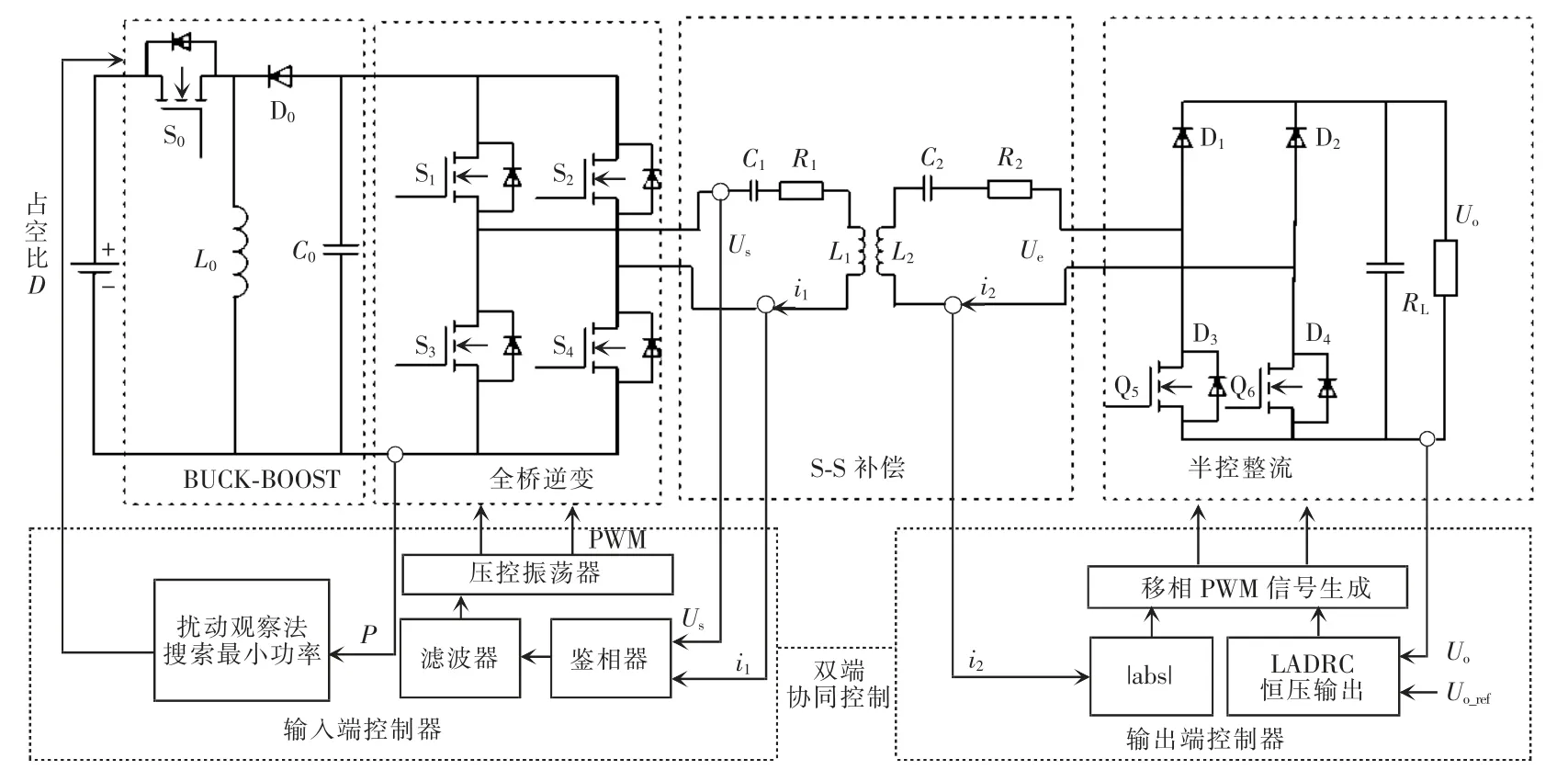
图7 WPT 系统整体控制框架Fig.7 Overall control framework of WPT system
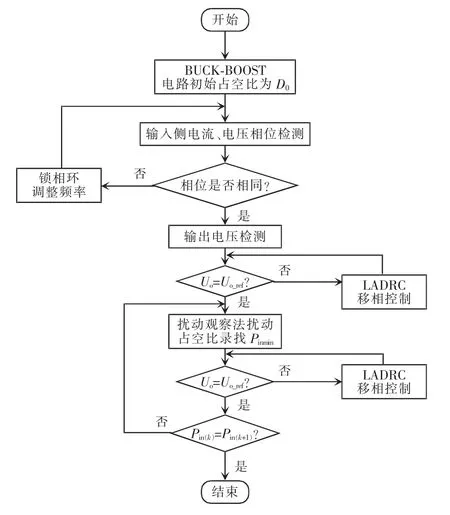
图8 双端协同控制流程Fig.8 Flow chart of double-end cooperative control
3 仿真验证与分析
为验证所提控制策略的有效性,在Matlab/Simulink 环境下搭建了基于LADRC 的无线电能恒压高效传输系统。仿真实验主要包括:一是负载和参考电压变化时不同控制策略下系统输出电压控制效果;二是负载和参考电压变化时效率跟踪结果。
3.1 不同控制方法输出电压对比
输入端利用锁相环进行频率跟踪,锁相环跟踪下的输入电压和电流波形如图9(a)所示,输入端电压和电流的相位相同,即锁相环跟踪到了WPT系统的谐振频率。输出端移相工作时的输出电压和电流波形如图9(b)所示。

图9 电压和电流波形Fig.9 Waveforms of voltage and current
为验证所提方法对输出电压的跟踪能力及鲁棒性,开展了在负载变化和参考电压变化下的LADRC 和PI 两种控制方法输出电压对比分析。分别设置了参考电压为40 V 的情况下负载电阻由20 Ω 突变为15 Ω 和25 Ω 的仿真实验,以及负载电阻为20 Ω 的情况下参考电压由40 V 突变为45 V的仿真实验。
PI 控制下的负载突变前后的输出电压波形如图10 所示,LADRC 控制下的负载突变前后的输出电压波形如图11 所示,参考电压突变后PI 控制和LADRC 控制的输出电压波形如图12 所示。

图11 LADRC 控制下负载突变时的输出电压波形Fig.11 Output voltage waveform when load is mutated under LADRC control
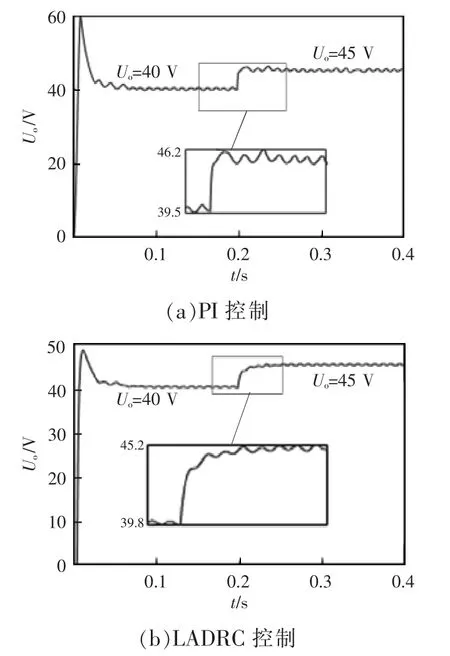
图12 不同控制策略下参考电压突变时的输出电压波形Fig.12 Output voltage waveform when reference voltage is mutated under different control strategies
由图10 和图11 可见,LADRC与PI 控制相比,LADRC 控制下的输出电压的超调量更小,由于输入端采用了扰动观察法寻找最小输入功率,占空比一直处于扰动状态,在负载变化前后LADRC 控制下的电压波形的波动幅度均小于PI 控制下的波动幅度,所以,在占空比扰动情况下LADRC 控制显示出了更好的动态性能。
由图10(a)和图11(a)对比可知,在负载减小突变时,LADRC 控制下的输出电压相较于PI 控制下的输出电压在上升过程中无超调产生且电压波动更小,且上升过程更平滑。由图10(b)和图11(b)对比可知,在负载增大突变时,LADRC 控制下的输出电压相较于PI 控制下的输出电压在恢复过程中产生超调小,电压波动更小。由图12(a)和图12(b)对比可知,在参考电压发生变化后,LADRC 控制下的输出电压无超调产生,且电压跟踪过程相较于PI控制更加平滑。
3.2 负载和参考电压变化下的效率追踪控制
为验证所提策略在负载变化和参考电压变化时的系统传输效率跟踪能力,开展了负载变化下采用和未采用效率跟踪策略下的仿真对比分析,以及采用效率跟踪策略下参考电压变化前后的传输效率仿真对比分析。图13 和图14 分别为谐振状态下负载由20 Ω 变为15 Ω 和20 Ω 变为25 Ω 时采用了效率追踪控制策略的传输效率和无效率追踪控制时的传输效率。

图13 效率跟踪控制的传输效率Fig.13 Transmission efficiency under efficiency tracking control
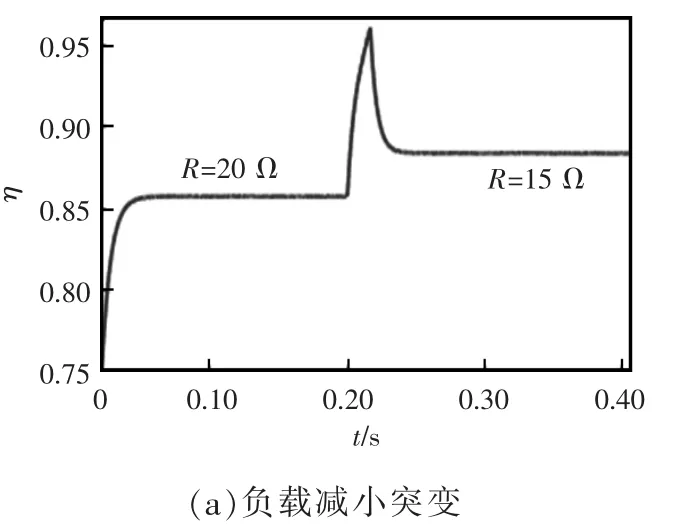
图14 无效率跟踪控制的传输效率Fig.14 Transmission efficiency without efficiency tracking control
由图13 和图14 可见,无效率追踪情况下,在负载为15、20 和25 Ω 时,系统的传输效率分别为87.5%、85.5%、83.0%,而采用了效率追踪控制的系统传输效率均能达到90.0%。
图15 为负载变化前后,效率追踪控制时扰动观察法扰动占空比D 的过程。图16 为负载电阻为20 Ω 时输出参考电压由40 V 变化为45 V 时的传输效率和占空比扰动过程。
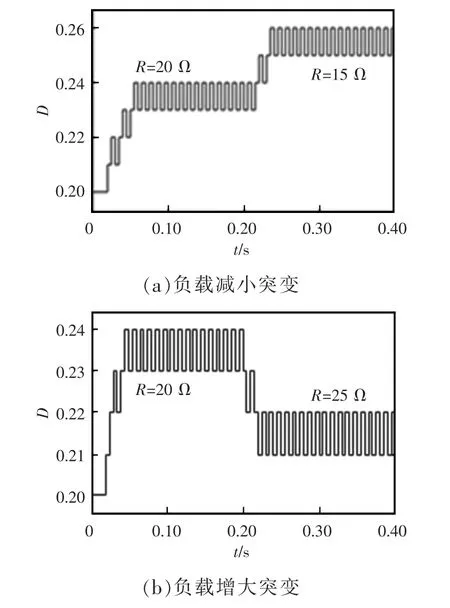
图15 负载变化时的占空比Fig.15 Duty cycle when load changes
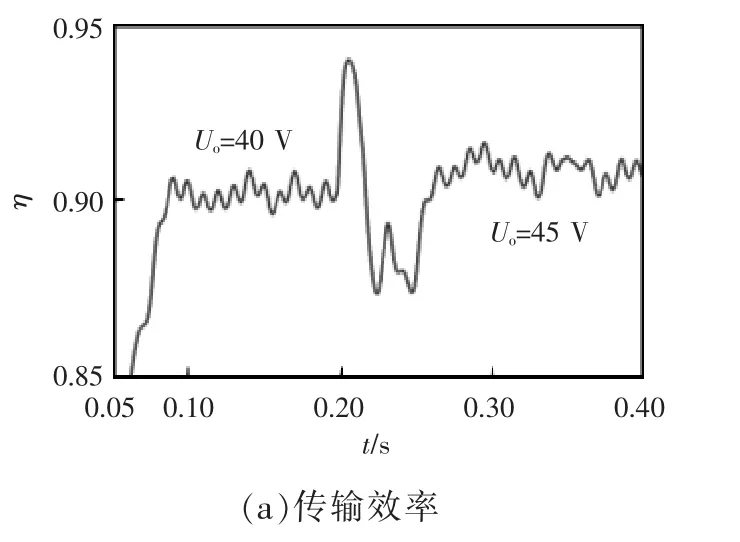
图16 参考电压变化时的传输效率及占空比Fig.16 Transmission efficiency and duty cycle when reference voltage changes
由图15 可见,当负载发生变化后,输入端的扰动观察法会及时扰动占空比寻找最大传输效率。由图16 可见,当参考电压变化后,在输入端扰动观察法的作用下系统的传输效率均可达到90.0%。
4 结论
本文针对WPT 系统的输出电压和传输效率受负载变换影响的问题,提出了一种LADRC 控制的无线电能恒压且两侧无通信传输方法。该方法在输出侧采用同相控制的移相方法确保了半控整流电路的输出电压恒定,在输入侧采用锁相环跟踪谐振频率和扰动观察法扰动寻找最小输入功率的策略确保了WPT 系统的高效运行。
通过负载和参考电压变化的仿真实验验证了所提方法的有效性。仿真结果表明:在输出电压控制方面,LADRC 控制相较于PI 控制超调更小,面对占空比扰动时,LADRC 控制的输出电压相较于PI 控制所产生的波动更小;在参考电压不变、负载发生减小突变时,LADRC 控制的输出电压恢复过程相较于PI 控制更加平滑且无超调产生;在负载发生增大突变时,LADRC 控制的输出电压恢复过程相较于PI 控制的超调更小;在负载不变、参考电压发生突变时,LADRC 控制的输出电压跟踪过程相较于PI 控制无超调产生且跟踪过程更为平滑。在最大效率跟踪方面,未采用最大效率跟踪控制的WPT 系统的传输效率在参考电压恒定负载分别为15、20 和25 Ω 时分别为87.5%、85.5%、83.0%,而采用了效率追踪控制的WPT 系统的传输效率不受负载变化的影响,且均达到90.0%。在负载恒定、参考电压变化时,采用了效率追踪控制的WPT 系统的传输效率未受参考电压变化的影响,也均达到90.0%。