基于ADRC 的LCC-S 谐振型无线充电副边闭环控制研究
2023-12-28苏建强任凯斌刘利强齐咏生
苏建强,任凯斌,刘利强,齐咏生
(内蒙古工业大学电力学院,呼和浩特 710049)
无线电能传输WPT(wireless power transfer)系统被广泛应用于医疗、家电、汽车、工业和航空电子等电池充电领域,不仅提高了生产效率,也给生活带来更加方便快捷的体验[1-2]。WPT 系统充电过程中,能量由不接触的耦合线圈产生高频磁场在空气中进行传输,而非通过导线直接连接,这就导致系统易受干扰,尤其是对于无人巡检平台领域的无线充电系统,受充电场地平坦程度以及停车角度等因素的影响,在自主停车过程中会存在偏差,导致耦合系数发生小范围扰动,并且锂电池广泛应用于无人巡检平台,其电池内阻会随充电时间的变化而变化。这些因素都是导致WPT 系统输出发生扰动的原因,因此对WPT 系统控制策略的鲁棒性提出了更高的要求。
WPT 系统中谐振网络决定了其输出特性,针对单一谐振网络输出不稳定的问题,国内外的研究重点在新型复合谐振网络,如LCC、LCL、SP/S、SP/P等均有较好的抗偏移性[3],而LCC-S 谐振网络在一定条件下具有原边恒流、副边恒压的输出特性,且系统输出电压增益高,副边结构简单,更适合锂电池无线充电需求[4]。但单靠改进谐振网络只能在一定范围内保持输出相对稳定,为了更好地抑制系统参数扰动对输出的影响,还需要引入闭环控制系统。根据锂电池充电特性,WPT 系统需要恒流恒压二段式闭环输出来保证电池的使用寿命。实现闭环输出的方法主要分为3 种:原边控制、副边控制和谐振网络控制[5]。文献[6]采用副边DC-DC 控制策略,通过PID 控制器实现系统闭环输出,但PID 控制器调节过程超调明显,快速性差;文献[7-8]分别采用卡尔曼滤波-模型预测复合控制和H∞控制方法应用于WPT 闭环控制系统,但这些控制器设计复杂且依赖精确的系统数学模型;文献[9]采用自调整模糊控制器对原边逆变器进行移相角闭环控制,但逆变器控制需要原、副边之间通信,控制系统实时性差,且系统在参数扰动下输出电压最大超调量达到33.5%,控制效果不理想;文献[10-11]在谐振电路添加电容、电感等无源元件并通过开关切换完成恒流恒压输出,由于谐振网络元件切换后系统固有频率发生变化,偏离谐振点,导致传输效率降低。
为减小外界和系统参数波动对输出的影响,提高WPT 系统的动态性能,本文在分析LCC-S 谐振型WPT 系统输出特性的基础上,提出一种基于ADRC(active disturbance rejection control)控制器的副边恒流恒压二段式闭环控制方法,该控制器继承了PID 的优点,无需精确的数学模型,并且非线性函数的引入提高了控制器性能。最后,搭建以DSP28335为核心控制板的硬件平台,实现系统在多参数扰动下输出电流、电压快速稳定调节。
1 系统结构与输出特性分析
1.1 系统结构
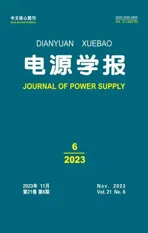
图1 为LCC-S 型WPT 系统整体拓扑结构,图中:DC 为直流源;L1和L2为耦合线圈等效电感;L3为谐振电感;C1、C2、C3为谐振电容;L4为滤波电感;C5为滤波电容;RL为负载。发射端直流电源经全桥逆变电路产生高频交流电,经谐振网络后由耦合线圈产生高频磁场将能量传递到副边耦合线圈,再经副边谐振网络、全桥整流电路后,将直流电输出给Buck 变换器,调节电流、电压后给负载供电。
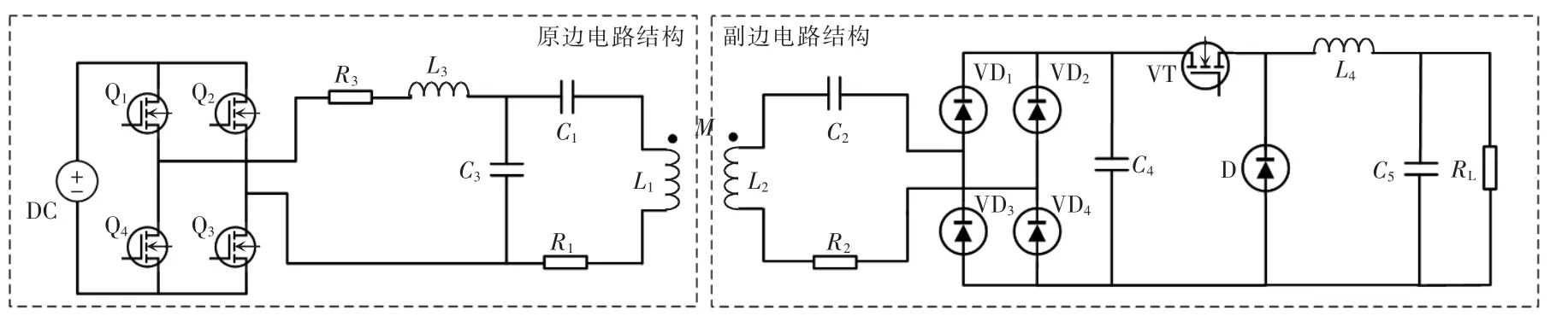
图1 LCC-S 型WPT 系统拓扑结构Fig.1 Topology of LCC-S WPT system
1.2 LCC-S 谐振电路分析
本文采用的LCC-S 高阶谐振电路如图2 所示。图中:U˙in为高频交流电有效值;I˙1为原边线圈电流;I˙2为副边输出电流;U˙o为系统输出电压;L1为原边线圈等效电感;L2为副边线圈等效电感;C1为原边串联谐振电容;C3为原边并联谐振电容;L3为原边串联谐振电感;C2为副边串联谐振电容;Req为等效负载;R1、R2和R3为电感线圈内阻;ω 为系统角频率;M 为两耦合线圈的互感。
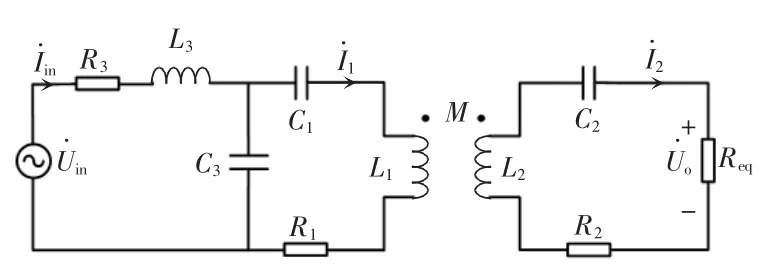
图2 LCC-S 谐振电路Fig.2 LCC-S resonant circuit
对LCC-S 电路解耦并由基尔霍夫电压定律KVL(Kirchhoff’s voltage law)得出,当系统处于谐振状态时,在忽略电感和线圈内阻的情况下,原、副边输出[4]为
由式(1)可以得出,系统输出电流I˙2、电压U˙o与耦合互感M、负载阻值Req有关。由于原、副边线圈位置偏移以及电池等效电阻随荷电状态变化而非线性变化,M 和Req会发生波动,从而导致输出电流、电压不稳定,所以为了使系统输出恒定,必须引入闭环控制系统。
2 WPT 系统的自抗扰控制
2.1 LCC-S 的WPT 系统扰动分析
为了在LCC-S 的WPT 系统中实现闭环精准调控输出电流、电压,本文采用副边闭环控制的Buck变换器,如图3 所示。控制原理为:采样电路实时采集负载电流、电压信号并传给ADRC 控制器,控制器通过估计各状态变量及总扰动加以补偿,最后将控制信号限幅后作用于PWM 发生器,经驱动电路后控制开关管。其中IL是流过滤波电感L4的电流,UL是电容C5两端的电压,Us为Buck 变换器输入电压,根据上文可知
图3 副边闭环控制电路Fig.3 Secondary-side closed-loop control circuit
因改变Buck 变换器的占空比不会影响WPT系统中整流环节之前的电路特性,所以在每个采样时刻将Buck 变换器的输入电压Us视为恒压源,此时可以将WPT 系统看作一个Buck 变换器,这样就降低了建模难度。通过状态空间平均法对Buck 变换器进行小信号建模,可得到输出电流IL、输出电压UL与控制信号d 之间的传递函数[12]分别为
对式(3)进行拉式反变换,得到输出电流IL的微分方程为
将式(4)改写为状态方程形式,有
式中:f1()为系统总扰动量;b1为控制增益;u 为控制量。
式(5)中,根据ADRC 控制理论可知,恒流控制的系统总扰动量和控制增益分别为
对式(3)进行拉式反变换,得到输出电压UL的微分方程为
将式(8)改写为状态方程形式为
式(9)中,恒压控制的系统总扰动量为
控制增益为
根据总扰动f1(IL,I˙L,ω,t)、f2(UL,U˙L,ω,t)并结合式(2)可知,系统在谐振情况下的总扰动主要由互感M、负载RL和原边输入电压Uin的变化引起。同时,控制增益b1和b2也会受系统参数的影响,当b1和b2偏离真实值时,可将偏离的部分作为扰动引入到系统总扰动当中。在实际应用中,电力电子器件并非处于理想状态,一些寄生参数包括电源内阻、线路电感和IGBT 寄生电容等,这些都可以作为系统内扰,利用ADRC 对其进行补偿。
2.2 ADRC 控制器设计
自抗扰控制器由跟踪微分器TD(tracking differentiator)、扩张状态观测器ESO(extended state observer)和非线性状态误差反馈NLSEF(nonlinear state error feedback)3 个基本部分组成,控制系统如图4所示。
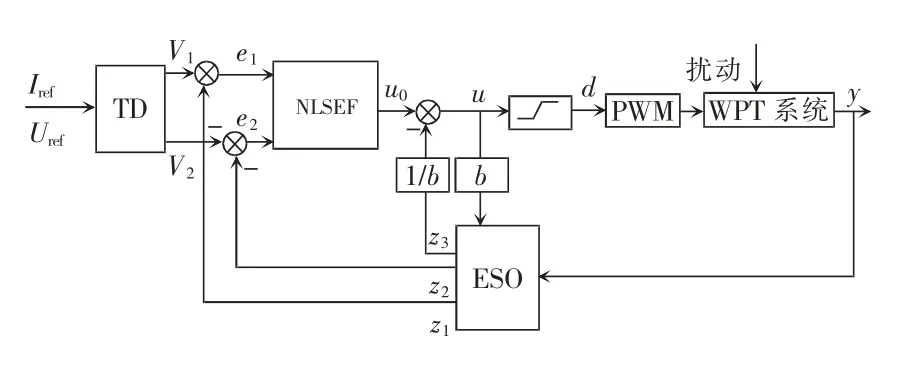
图4 WPT 系统的ADRC 控制框图Fig.4 ADRC control block diagram of WPT system
1)跟踪微分器设计
跟踪微分器可以对目标信号安排过渡过程,避免启动时系统输出超调过大,并且获得目标信号的微分信号。设计的二阶TD 环节可表示为
式中:Iref和Uref分别为电流和电压的目标值;v1为Iref和Uref的跟踪信号;v2为v1的微分信号;UT为恒流恒压控制切换电压;r 为速度因子;h0为滤波因子;fhan 为最速综合函数。
2)扩张状态观测器设计
ESO 用来估计WPT 系统的输出量、输出量微分信号和总扰动信号,是ADRC 的核心。根据扩张状态观测器的原理,可将上文WPT 系统的总扰动f1(IL,I˙L,ω,t)和f2(UL,U˙L,ω,t)扩展为新的状态变量x3,则在系统恒流控制下,状态方程可改写为
系统恒压控制下,状态方程可改写为
式中:x1为输出电流IL、电压UL的值;x2为输出的微分信号;x3为系统总扰动量。
根据式(13)和式(14)构造三阶非线性扩张状态观测器,即
式中:z1为输出电流IL、电压UL的估计值;z2为输出量微分信号的估计值;z3为系统总扰动的估计值;β1、β2和β3为观测器增益;b 为控制增益;fal 为最速控制函数;e1为误差;α1和α2为误差指数变化参数;δ 为函数线性区域的长度。
3)非线性状态误差反馈设计
对于ESO 估计得出的扰动,通过NLSEF 对误差反馈量进行实时的扰动补偿。设计非线性组合形式PD 控制作为控制率,即
式中:uo为非线性组合的输出;kp为比例系数;kd为微分系数;u 为总扰动估计补偿后的控制量。
4)参数整定
ADRC 参数众多,首先调节TD 参数使其快速跟踪给定信号,其中r 为速度因子,r 越大跟踪效果越好,但取值过大会使跟踪的信号噪声含量增大,取值过小会引起较大的延时滞后,一般取值在2 000~10 000 之间,可结合仿真实验进行调节。
ESO 中的参数β1、β2和β3由系统采样时间T决定,经验值为β1≈1/(1.0T1.0),β2≈1/(1.6T1.5),β3≈1/(8.6T2.2)[13];幂次α 为跟踪因子,满足α1>α2>…>αn,0<αn<1,其值越小,误差衰减速度越快,抗干扰能力越强,但过小会导致控制量的高频颤振,对于实际执行机构往往带来不良影响,经验值取α1=0.95,α2=0.50;δ 为滤波因子,是最速控制函数fal 的线性区间,过大会减小非线性增益的优势,过小容易使系统不稳定,取0.01<δ<0.10。
NLSEF 中的比例系数kp、微分系数kd与PID参数整定规则相同;补偿因子b 由被控对象决定,若实际应用中无法获得准确的b 值,可用近似估计值代替,由ESO 将未知部分当作扰动处理即可。
3 实验验证
通过实验验证ADRC 恒流恒压二段式副边闭环控制方法的可行性,并与传统PI 控制进行对比。依据图1 搭建LCC-S 谐振型无线充电系统实验平台,如图5 所示,参数见表1。整个系统由全桥逆变电路、LCC-S 谐振电路、耦合线圈、不控全桥整流电路、Buck 电路和DSP28335 控制板(时钟频率150 MHz)组成。系统原边由1 200 W 可调直流电源稳定供电。系统预先以恒流2 A 输出,随着负载增大,当负载电压达到设定值30 V 后,切换为恒压30 V 输出,接着对恒流、恒压阶段分别加入参数扰动来观测闭环系统控制性能。
表1 WPT 系统电路参数Tab.1 Circuit parameters of WPT system
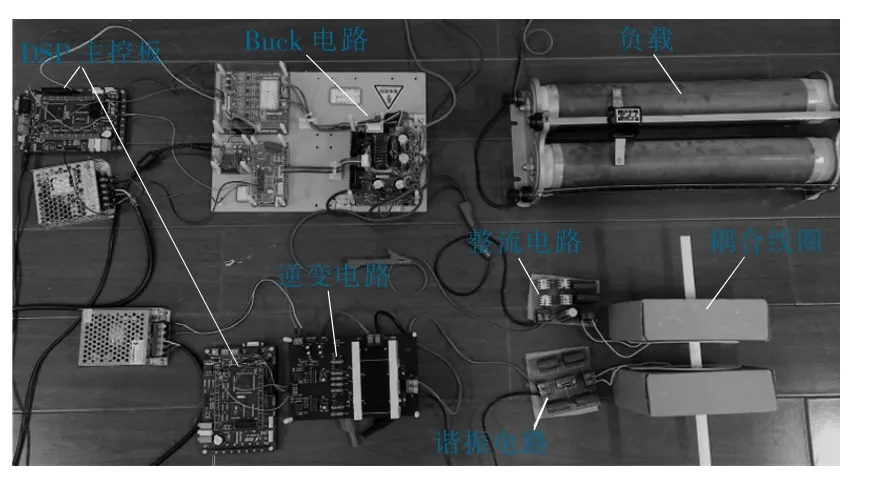
图5 无线充电系统实验平台Fig.5 Experimental platform of WPT system
图6 为系统工作时逆变器输出电流、电压波形,可以看出Iin和Uin始终保持零相角,系统发生谐振,满足磁耦合谐振式无线充电条件。
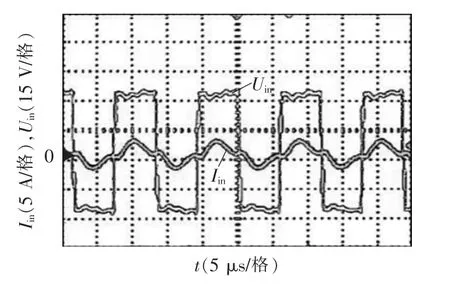
图6 逆变器输出波形Fig.6 Waveforms of inverter output
3.1 恒流恒压二段式输出启动实验
设定初始负载为10 Ω,线圈初始距离3 cm,系统预先以恒流2 A 输出,得到系统恒流启动波形如图7 所示。图中Us为Buck 变换器输入电压,IL为负载电流。

图7 2 种控制器下系统恒流启动波形Fig.7 Waveforms when the system constant-current starts with two controllers
图7(a)为PI 控制下系统恒流启动波形,由于原边可调直流电源的限流,闭环控制启动时电压Us缓慢上升,调节过程中电流IL超调量为0.280 A(14.0%),调节时间为0.90 s;图7(b)为ADRC 控制下系统恒流启动波形,调节过程中电流IL超调量为0.135 A(6.7%),调节时间为0.65 s。
随着负载增大,当负载电压达到30 V 时,系统转换为恒压30 V 输出。所以调节负载由10 Ω 切换至20 Ω,此时恒流2 A(20 V)转换为恒压30 V 输出波形,如图8 所示。图中Us为Buck 变换器输入电压,UL为负载电压。

图8 2 种控制器下系统恒流转恒压输出波形Fig.8 Waveforms of output when the system changes from constant-current to constant-voltage with two controllers
图8(a)为PI 控制下恒流转恒压输出波形,调节过程中电压UL超调量为3 V(10%),调节时间为0.300 s;图8(b)为ADRC 控制下恒流转恒压输出波形,调节过程中UL无超调,调节时间为0.175 s。
综上所述,2 种控制方法均实现了控制目标,但ADRC 控制器对闭环启动阶段输出电流、电压的调节更快速且超调量小,具有明显优势。
3.2 抗扰性能实验
在系统恒流或恒压控制时,将负载RL和互感M 作为扰动引入,观测2 种控制方法下系统的动态响应。设定初始负载为5 Ω,线圈初始距离3 cm,由于副边采用Buck 降压电路进行输出电流、电压的调节,该电路的输入电压应大于系统恒压输出值30 V,所以根据LCC-S 谐振网络电压输出特性,得出线圈互感值应大于6.3 μH,实验测得线圈最大偏移量约为±2 cm。
恒流控制时,将负载由5 Ω 切换至10 Ω,2 种控制器的控制输出波形如图9 所示。由图9(a)可见,PI 调节过程中电流IL最大跌落量为0.33 A(16.7%),调节时间为0.25 s;由图9(b)可见,ADRC调节过程中电流IL最大跌落量为0.16 A(8.0%),调节时间为0.20 s。
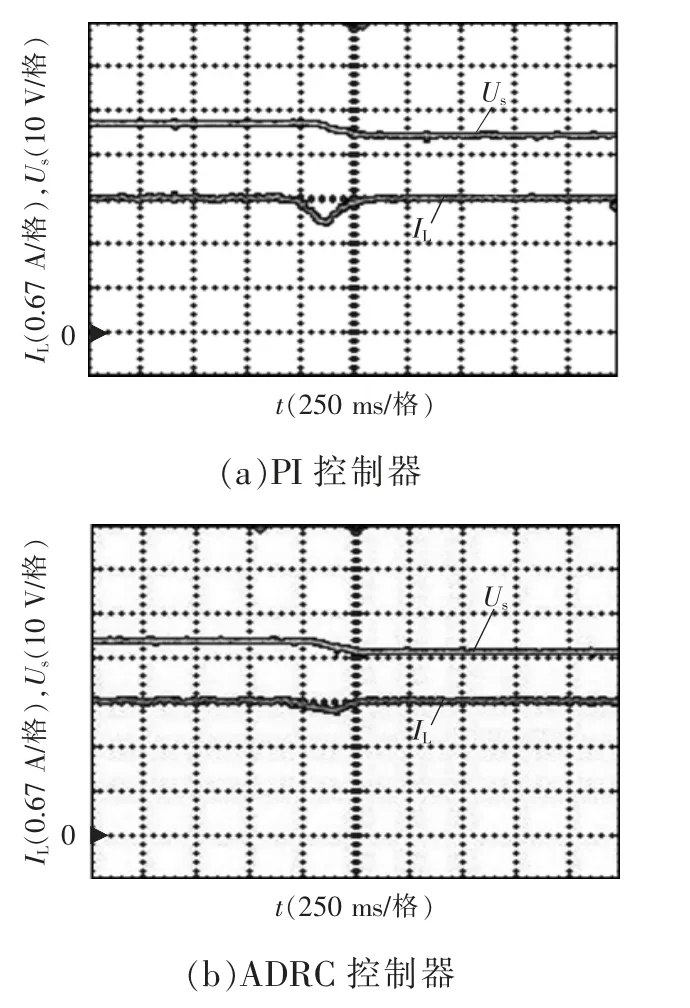
图9 2 种控制器在负载扰动下恒流输出波形Fig.9 Constant-current output waveforms of two controllers under load disturbance
恒流控制时,将线圈纵向距离偏移1 cm 后互感发生变化,2 种控制器的输出波形如图10 所示。由图10(a)可见,互感扰动后电压Us跌落10 V,PI 调节过程中电流IL最大跌落量0.27 A(13.5%),调节时间为0.30 s;由图10(b)可见,ADRC 调节过中电流IL最大跌落量为0.13 A(6.5%),调节时间为0.15 s。
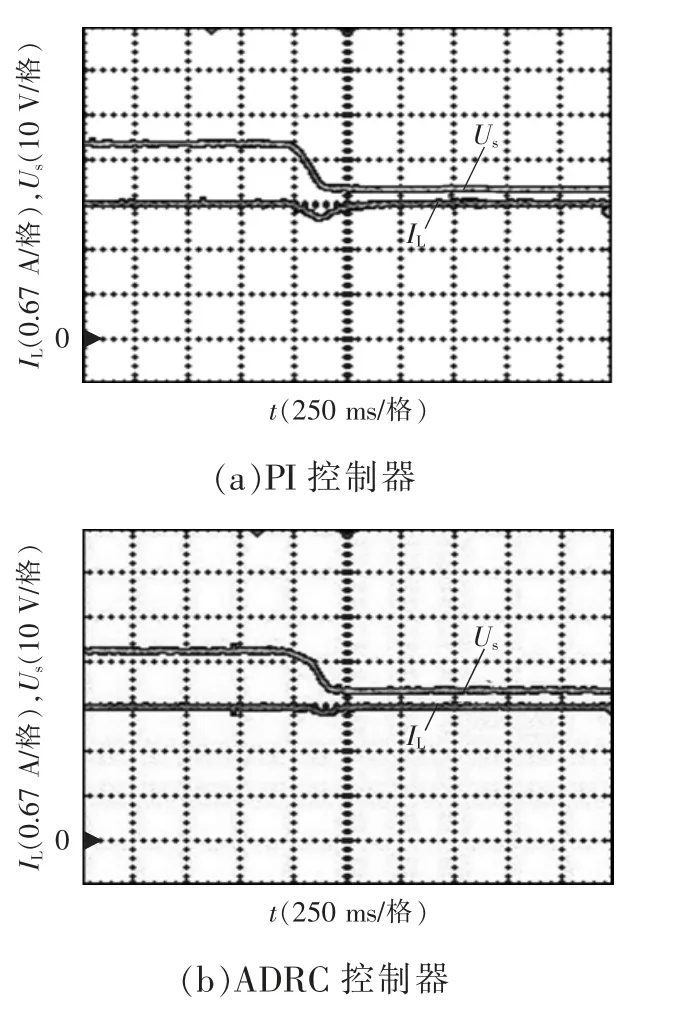
图10 2 种控制器在互感扰动下恒流输出波形Fig.10 Constant-current output waveforms of two controllers under mutual inductance disturbance
恒压控制时,在负载、互感扰动下2 种控制器输出波形如图11 所示。由图11 可见,将线圈纵向距离偏移1 cm 的同时,负载由15 Ω 切换至25 Ω后,2 种控制器下输出电压UL均无明显变化,验证了LCC-S 谐振网络输出电压的负载无关性。
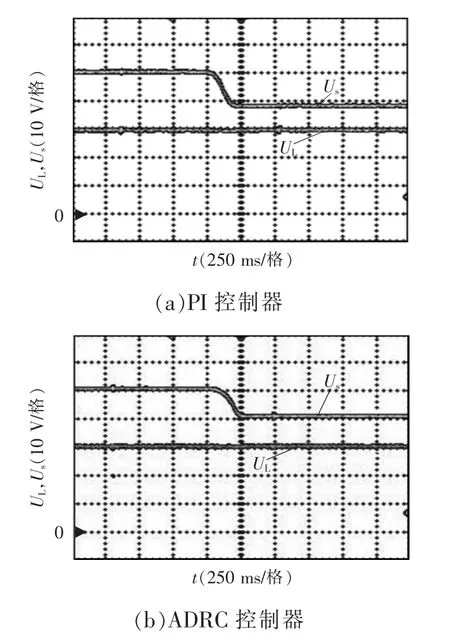
图11 2 种控制器在负载、互感扰动下恒压输出波形Fig.11 Constant-voltage output waveforms of two controllers under load and mutual inductance disturbances
综上所述,ADRC 控制器相比于PI 控制器更好地解决了互感、负载扰动对系统输出的影响,提升了WPT 系统的鲁棒性和动态响应速度。2 种控制器的动态响应结果如表2 所示。
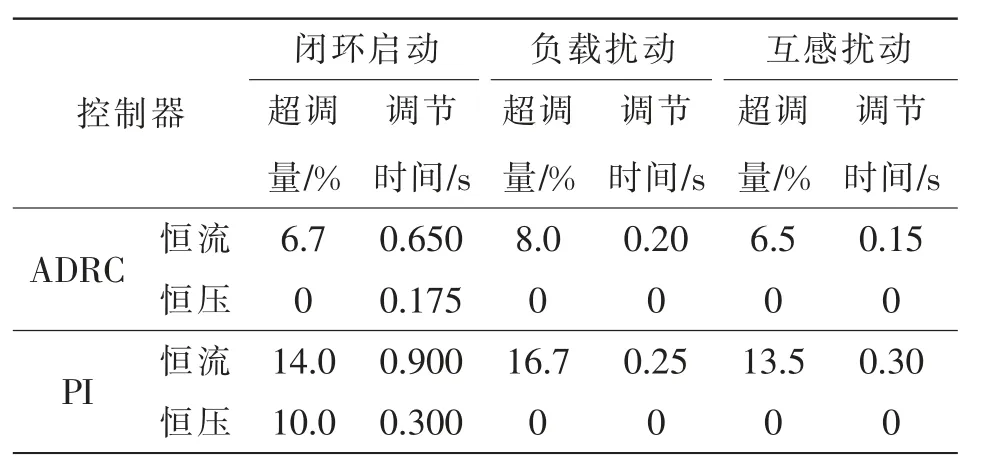
表2 2 种控制器动态响应仿真结果对比Tab.2 Comparison of simulation result of dynamic response between two controllers
4 结语
本文为提升WPT 系统的快速响应和鲁棒性需求,提出一种针对互感和负载动态变化情况下的闭环控制方法。本文设计的LCC-S 谐振型无线充电闭环控制,采用副边DC-DC 闭环控制方法,无需原、副边之间通信,实时性好,且对原边系统影响小。将ADRC 控制器引入WPT 系统副边闭环控制中,实现了恒流恒压二段式输出,相比传统PI 控制器,ADRC控制器具有动态响应快、抗干扰性能强和对系统模型依赖度低等优势,可以广泛应用到汽车、医疗和工业等电池无线充电领域。本文所提控制方法是基于静态WPT 系统的,而对于更高鲁棒性和快速响应要求的动态WPT 系统也具有很好的参考价值。