基于六自由度运动轨迹的晃车仪测试技术
2023-12-06陈春雷程朝阳赵紫珅
韩 志, 陈春雷, 程朝阳, 赵紫珅, 刘 凯
(中国铁道科学研究院集团有限公司 基础设施检测研究所,北京 100081)
1 引 言
随着国民经济的快速发展,我国铁路运行速度为适应国民经济的需求,也在向高速化发展,而行车速度的提高对轨道的平顺性要求也越来越高[1~3];而且高铁及客车专运线行车密度大,大型轨检车上道作业只能利用夜间进行,线路巡检、维修养护时间短[4,5]。目前,日本、德国、英国及法国等国家的轨检车检测水平,无论是在检测项目的全面性、检测系统的适用性、检测数据的精准性,还是在轨检车运行的安全性和可靠性等方面,均处于世界领先水平[6]。近年来国内的高速铁路正在飞速发展,之前采用的综合检测、接触网检测车、轨道检查车等手段[7,8],由于设备及使用的仪器仪表等相关装置老旧,在实际使用过程中无法进行统一的协调和规划,干扰了正常的列车运营秩序。为便携精准而研制的线路检查仪应运而生[9]。目前,线路检查仪内部通常为1个三轴向的加速度计,在列车正常行驶时,三轴向的加速度计用来检测行驶方向法向的2个方向的加速度[10],进而得到列车在行驶中受轨道影响而产生的晃动。对线路检查仪进行校准测试通常只是使用线振动的方式,以振动台一维到三维的线振动为基准,来检验线路检查仪在各种线振动工况下的解算性能。
然而,在正常工作环境中,铁路轨道不止存在简单的线振动,通常线振动与角振动并存,单一的测试手段与测试解算方法不能够获得精度测量值。基于此,对线路检查仪不同工作环境中的解算能力进行测试研究,通过与陀螺仪数据融合的方式,实现多自由度下线路检查仪的精准测量。
2 基于晃车仪的六自由度测试系统
为检验晃车仪(线路检查仪)在振动测量方面的基本性能,建立了如图1所示的六自由度(6 degree of freedom,6-DOF)平台测量系统,上位机驱动六自由度平台,末端执行器实现包含静态倾斜在内的角振动、线振动与复合振动。晃车仪紧固于六自由度平台直接测量平台的倾斜角度与振动幅度,通过与六自由度平台驱动编码器(六自由度平台反馈结果)的对比,得到晃车仪的解算误差与静动态性能。
如图2所示,当车辆在线路上发生晃车振动时,晃车仪内部的三轴加速度计感应车辆振动加速度变化,加速度计处于测量平衡状态时,重力加速度作为唯一激励源作用于传感器。考虑敏感轴上的分量,与重力加速度的大小和方向建立关系,可以实现线运动和倾斜角度的测量。故测量平台的运动角度变化可转化为重力分量的测量,进而得到平台的动静态角度变化。由图2可知,倾斜角度峰值为:
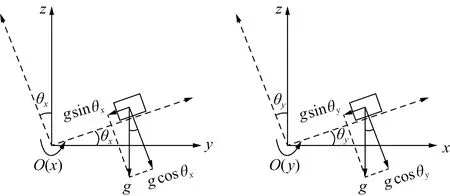
图2 晃车仪的测量原理Fig.2 Swing vehicle measuring principle
(1)
式中g为重力加速度。
3 静态角测试
首先对晃车仪进行静态角度测试,检测晃车仪内部加速度计的重力感应性能以及相对的静态角度解算能力。将晃车仪置于六自由度平台上,驱动六自由度平台进行静态倾斜角度测试。
通过式(1)得到经过晃车仪测量重力分量后的平台倾斜角。测试结果如图3所示。
从晃车仪测量角度与六自由度平台编码器数据对比结果可知,晃车仪的静态角度测试相对误差最高不超过3%,晃车仪静态测试性能较好,能够识别解算出被测平台的倾斜角度。
4 动态测试
利用六自由度平台对晃车仪进行动态测试,检测晃车仪的动态解算线角性能。平台选择0.2~2 Hz线角振动频率范围,以检验晃车仪的动态角度和线振动性能。利用ISO 16063-11[11]与ISO 16063-41[12]推荐的正弦逼近法来拟合晃车仪线角振动信号,并对数据进行对比。
4.1 角振动测试
驱动六自由度平台做角振动,利用晃车仪内部加速度计进行动态角度测试,晃车仪加速度计的重力分量由式(1)可得到晃车仪测试解算的角度,与六自由度平台对比结果如图4所示。
从图4中晃车仪与编码器的相对误差趋势能够得到,在六自由度平台低频角振动中的高频部分相对误差较大,造成误差较大的主要原因是晃车仪内部加速度计在一定频率范围内误差恒定,高频角振动下幅值小、信噪比低。
4.2 线振动测试
驱动六自由度平台做线振动,直接利用晃车仪三轴加速度计测量平台振动加速度值,二次积分后得到线振动幅值,与六自由度平台驱动编码器值对比结果如图5所示。

图5 线振动测试结果Fig.5 Vibration measurement
由图5可知,晃车仪线振动测试结果与角振动结果相对误差趋势大致相同,造成六自由度平台低频线振动中的高频部分相对误差较大的原因与角振动相同。
4.3 复合运动测试
从角振动测量与线振动测量的结果来看,晃车仪可以做到单一振动的参数测试解算。但是晃车仪的工作环境中不仅仅是单一的线振动或者角振动,而通常是复杂的线角复合运动,为测试晃车仪在复合运动中的工作性能,驱动六自由度平台做x轴和y轴的线角复合运动。
当六自由度平台同时做同频线振动和角振动时,晃车仪内部加速度计同时受到线振动加速度和角振动重力分量带来的影响[13],如图6所示。

图6 复合运动示意图Fig.6 Composite motion diagram
角振动与线振动叠加的复合运动加速度a可量化处理为:
a=Asin(2πft+φ)+(g·sinθ)sin(2πft+φ)
(2)
式中:A为线振动幅值;g·sinθ为角振动带来的水平轴向重力分量;f为振动频率;φ为相位角。
由角振动引入重力分量与线振动产生的加速度在这二者的叠加影响下,仅由加速度计解算振动幅值结果出现错误,需要明确得到角振动的幅值,才能将其分离,进而得到实际线振动幅值。
4.3.1 加速度计解算
利用六自由度并联运动平台沿z轴进行传感器多频点测试,测试结果如图7所示。可知沿z轴在六自由度平台做复合运动时,同样会受到重力分量的影响,理论上z轴受到的重力分量通过式(1)的解算同样可得到角振动值,进而得到实际的振动幅值,但是实际解算结果如图7所示。

图7 z轴角度结算结果Fig.7 z-axis angle test and theoretical results
如图7所示,随着振动幅度逐渐减小,受环境噪声与系统自身精度三维影响,重力分量解算的角度的误差逐渐变大,同样地线振动的幅值解算误差也逐渐变大,导致无法分离数据,得到的振动幅值不准确。仅利用加速度计的解算,分析结果会受到倾角、噪声等的影响,以致于解算结果不确定度变大。
4.3.2 融合陀螺仪解算
基于六自由度平台的晃车仪测试流程图如图8所示,其中复合运动测试中,加速度计在线振动与角振动叠加的情况下,仅凭单轴向的加速度计数据无法分离出振动幅值。但是在融合与加速度计同步采集的陀螺仪后,通过陀螺仪数据积分解算获取复合运动中角振动的幅值,通过式(2)消除角振动带来的误差分量,进而将线振动与角振动分离,分别得到角振动的幅值与线振动的幅值,测试解算值与平台编码器值对比如图9所示。

图8 工作流程图Fig.8 Workflow diagram
由图9可知,融合陀螺仪后,晃车仪测试能力大大提升,相较于图7所示的解算误差,融合陀螺仪下测量精度提高,能适应的复杂工作环境也变多。在实际测量工作中,陀螺仪可作为判断工况中有无角振动的依据,在无角振动工作环境下,陀螺仪无信号输出,直接根据加速度测量信号得到被测物体的振动幅值,可直接避免角振动与线振动的复合混杂。
5 参考点幅值不确定度分析
陀螺仪与晃车仪二者数据融合后需要对其整体进行不确定度分析,以此来判断整个测试系统的稳定性与准确性。在参考频率0.5 Hz、参考运动幅值15 mm,参考运动角度幅值3°的复合条件下,进行晃车仪整体测试系统不确定度分析。
5.1 实验标准偏差与重复性
六自由度平台x、y轴线角复合运动下,重复测量20次,与陀螺仪融合后的晃车仪线角振动测试解算数据和六自由度平台编码器对比残差如图10所示。

图10 复合运动测试结果Fig.10 Composite motion measurement results
如图10所示,参考点多次测量结果根据JJF 1059-1999[14]中测量不确定度评定方法,对同一被测试量做n次测量,表征测量结果分散性的量,即试验标准差s可按照贝塞尔公式计算:
(3)

根据式(3)可得,在参考频率与参考幅值下,复合运动下线振动测量结果的标准差为0.048 mm;复合运动下角振动测量结果的标准差为0.001 3°。
采用晃车仪与陀螺仪传感器数据融合的方法,对同一被测量做n次测量,表征测量结果重复性的量,即试验重复性δ可按照式(4)计算。
(4)
式中s(q)为n次测量的方差。
根据式(4)可得,在参考频率与参考幅值下,复合运动线振动测量的重复性为0.32%;复合运动角振动测量的重复性为0.04%,证明数据融合后整体测试系统具有良好的重复性。
5.2 不确定度评定
5.2.1 随机误差引入标准不确定度分量
当六自由度平台频率为0.5 Hz,动平台位移幅值15 mm,动平台角振动幅值3°时得到的线振动标准偏差Δl为0.048 mm;角振动标准偏差Δa为0.001 3°,由式(3)可得出线振动和角振动算术平均值的实验标准偏差引入的不确定度分量Δ[15,16],ul1、ua1分别为0.18%、 0.02%。
(5)
5.2.2 安装等因素的影响
由安装、电缆等因素带来的误差在0.05%之内,假设为均匀分布,则其对线振动和角振动引入的不确定度分量ul2、ua2由下式计算:
(6)
5.2.3 参考点的相对扩展不确定度
综合参考点的不确定度分量,整体系统的相对合成不确定度按(7)式计算,可得到整体系统线振动和角振动的相对合成不确定度url、ura分别为0.18%、0.04%。
(7)
当取包含因子k=2时,整系统线振动和角振动的相对扩展不确定度Ur1、Ura可得由式(8)计算可得0.36%、0.08%。
Ur=k·ur
(8)
6 结 论
本文通过分析基于六自由度平台多自由度运动下晃车仪的位姿解算,提出了一种融合陀螺仪测量的晃车仪位姿解算方法,该方法通过陀螺仪测量复合运动下的角速度积分角度,弥补了重力分量影响下单一加速度传感器无法准确解算复合运动幅值的缺陷。利用六自由度平台产生多组多自由度复合运动轨迹,分别对应实际应用的不同工况,来对晃车仪动态解算能力进行测试,并对融合陀螺仪角度解算后的整体设备进行不确定度评定,得出了参考频率点灵敏度幅值校准的扩展不确定度。提出的基于六自由度运动轨迹的晃车仪测试方法,通过复合运动轨迹,极大扩展了晃车仪的动态测试范围,提升了晃车仪的动态解算能力。
