航行体水下连续发射尾涡遭遇与运动干扰特性
2023-11-27施瑶任锦毅高山潘光权晓波
施瑶,任锦毅,高山,潘光,权晓波
(1.西北工业大学 航海学院, 陕西 西安 710072;2.无人水下运载技术工信部重点实验室, 陕西 西安 710072;3.北京宇航系统工程研究所, 北京 100076)
0 引言
单筒多弹水下连续发射技术是指在极短的时间内依托水下发射系统,将多发航行体以一定发射间距连续弹射出水的过程。这种发射方式兼具攻击面广、储弹量大等特点,容易实现饱和攻击,大幅度提高潜射武器的水下突防概率,近年来越来越受到各军事强国的关注。但是,在水下发射过程中,航行体处于一个极其复杂的流场环境,如极限流域运动、筒口高压游离气团及水面介质突变等,严重影响航行体水下发射安全性。特别是在水下连续发射过程中,前一发航行体的周围流场会对后一发航行体受力特性与姿态稳定性产生较大的影响。
目前水下发射大多数成果集中在对单发航行体空化水动力特性与姿态稳定性的研究[1-7]。在数值模拟方面,王一伟等[8-9]系统地开展了潜射航行体发射过程中空泡的发展演化与溃灭脱落过程,提出用回射流和航行体的运动时间比值来判定空泡稳定性的理论。胡影影等[10]利用流体体积(VOF)方法模拟了细长体低速出水过程自由液面的变化,研究了弗劳德数、韦伯数等无量纲参数对自由液面演化过程的影响。王红萍等[11]模拟了艇速效应下航行体出水全过程,分析了航行体出水姿态角的演变规律。在实验测试方面,权晓波等[12]对不同发射条件下航行体空泡形态开展了实验研究,发现航行体在大攻角状态下,其周围空泡分布不均匀,迎背水面压差作用范围增大。赵蛟龙等[13]利用高速摄像机对细长体出水全过程进行拍摄,发现细长体的运动姿态与非定常空泡水下闭合位置密切相关。张军等[14]采用粒子图像测速(PIV)技术对航行体水下垂直以及带攻角出水流场进行了测量;虽然在水下发射过程空化流动显得至关重要,然而由于水下连续发射环境的特殊性,航行体流动干扰特性由其他因素所主导,其中尾流效应在其中起着至关重要的作用。 Kumar等[15]采用大涡模拟方法重点研究了潜艇螺旋桨尾涡不稳定性机制,发现尾缘卷起产生了较小的涡旋对,导致尾涡结构的不稳定性。另外,在其尾流中还捕捉到一对反向旋转涡,其中顺时针涡强度比逆时针涡大10%~20%。由于水下连续发射概念较新,相关文献较少,但水下串并联发射相关研究成果[16-17]仍有借鉴意义。宋武超等[18]基于非线性假设和势流理论,创建了平面轴对称入水空泡的数值计算模型,得出了双发回转体并联入水过程的三维空泡演化特性。Chen等[19]研究了发射深度、速度、攻角等参数对航行体水下发射过程流场结构演变与压力特性影响,捕捉到了航行体背流面和尾流中初级和次级发卡涡的生长过程,同时发现发卡涡中存在反向旋转涡对。夏雪湔等[20]开展了钝头回转体尾涡结构的实验研究,试验结果表明钝头回转体尾涡表现为多个发卡涡相互连接的形式。Gao等[21-22]研究了大尺度和大深度下航行体水下连续发射过程中尾涡结构演变,发现当输运速度较高时,航行体尾部脱落的涡环与反向旋转涡对合并形成发卡涡,其中反向旋转涡对成为发卡涡的涡腿,涡环向上滚动形成涡头,对次发航行体运动姿态产生较大的影响。
综上可知,对于横流效应下航行体水下发射过程尾涡结构形成与作用机制相关研究还未发现,加之不同发射时间间隔下,首发航行体尾涡结构对次发航行体运动姿态的影响机理及其复杂,目前针对该问题研究非常有限。
本文基于重叠网格零间隙技术与能量方程、VOF界面捕捉技术与可实现的k-ε湍流模型,对横流效应下航行体水下连续发射过程开展数值模拟研究,获取首发航行体尾流区涡结构的形成及作用机制,不同发射时间间隔下航行体迎、背流面压力分布,次发航行体水动力特性、弹道以及俯仰姿态演变规律。通过数值模拟结果获取一些规律,为水下连续发射技术提供参考。
1 数值方法建立与有效性验证
1.1 控制方程
描述航行体水下连续发射数值模拟方法以N-S方程为基础,求解质量守恒方程和动量方程,其基本形式如下:
拉格朗日有限体积分析的质量守恒方程为
(1)
动量守恒方程为
(2)
式中:ρ为密度;t为时间;xi与xj分别用于求得流动沿i、j坐标轴的分量;ui、uj分别表示i、j方向的速度分量;p为压强;g为重力加速度;μ与μt分别表示动力黏性系数与湍流黏性系数。
1.2 VOF模型
流体体积多相流模型是基于欧拉网格下的表面追踪方法,广泛应用在多相流体界面的网格上模拟互不相容流体的流动。如果用αq表示第q种流体在网格下的体积分数,则用αq=0表示网格中没有第q种流体,αq=1表示网格中只含有第q种流体。对流体的体积分数进行离散:
(3)
1.3 湍流模型
采用可实现的k-ε模型的湍流模型,可实现的k-ε模型为湍流黏性项提供了可选择的公式,同时为湍流耗散率ε提供了新的输运方程:
(4)
(5)
式中:k为湍动能;ε为湍动能耗散率;σk和σε分别为k与ε的湍流普朗特数;Gk、Gb分别为平均速度的梯度和浮力引起的湍流动能项;YM为可压缩湍流中波动的膨胀值对总耗散率的影响;Sk表示与湍动能k相关的源项;Sε表示与湍流耗散率ε相关的源项;C1、C2、C1ε、C3ε均为常数;S表示应变率张量的范数;Sij表示应变率张量。
1.4 重叠网格技术
重叠网格的节点包括洞内节点、计算节点和插值节点。其中,计算节点参与流体计算,插值节点用于流场信息的传递。重叠网格技术的基本思想是利用子域网格在重叠区域进行插值处理,以实现流场参数的实时传递,不同于传统的贴体网格,避免了其重组过程中网格畸变等问题。
1.5 几何模型与网格划分
图1所示为水下连续发射计算域的划分以及边界条件的设置,背景域尺寸为4l×4l×4l,l为航行体长度,左侧边界设置为速度入口,顶部及右侧设置为压力出口,发射筒底部设置为滞止入口,入口压力随时间变化,并由用户自定义函数进行指定。数值计算模型中航行体直径d=0.04 m,长细比l/d=8;发射筒长度为1.2l,发射筒与弹体之间采用一定的配合精度,在实验过程中既能满足航行体在筒内自由滑动的要求,又能达到防止高压气体泄漏的效果。在双体水下连续发射数值模拟中,采用高压气体将航行体弹射出筒,其中航行体在筒内沿着z轴正方向运动,出筒后以6自由度方式运动。本文定义坐标系原点位于双发射筒筒口中心,x轴与水平方向重合并指向右侧,z轴与竖直方向重合并指向上侧,航行体轴线与水平正方向的夹角定义为运动姿态角。横向来流速度沿着x轴正方向,重力方向沿着z轴负方向;A、B分别为两个航行体。

图1 几何模型与边界条件Fig.1 Geometry and boundary conditions


表1 受控变量值Table 1 Controlled variable value

图2 网格划分细节Fig.2 Meshing details
1.6 数值算法与网格无关性验证
如图3所示,为验证数值算法的有效性,本文自主设计了水下发射实验装置,该装置由控制系统、数据采集系统、水下发射平台以及供气系统等组成。发射装置主要由空压机、电磁阀以及储气罐构成。航行体采用冷发射方式,实验过程中,空气经空压机压缩后通过管路输送至储气罐,管路中安装有数字压力表可以获取实时压力,通过调节压力大小可以控制航行体发射速度。储气罐通过管路与发射筒底部相连,二者之间安装有电磁阀,当电磁阀打开时,高压气体流入发射筒底部,推动航行体发射。在数值模拟中,发射筒底部采用滞止入口边界条件。为了模拟实际发射过程的气体循环过程,滞止入口压力随时间的变化由自定义函数指定,在弹体出筒后下降到大气压强,如表2所示。

图3 水下发射实验装置示意图Fig.3 Schematic diagram of the experimental setup

表2 滞止入口压力变化
在此基础上开展了直径20 mm、长度120 mm的抗空化头型航行体在出筒速度Fr=6.32工况下的水下发射试验与数值模拟。对航行体水下发射的3个典型时刻开展数值仿真与实验对比,结果如图4所示,表明航行体的运动姿态具有高度相似性。在此基础上,对航行体的运动数据进行提取。图5为航行体运动姿态的提取过程,图6、图7分别为水下弹道曲线与偏转角θ对比,可以发现数值计算结果与实验数据基本吻合。

图4 仿真计算结果(左)与实验结果(右)对比Fig.4 Comparison of simulation result(left) and experimental result(right)

图5 航行体姿态提取过程流程Fig.5 Process of vehicle attitude extraction
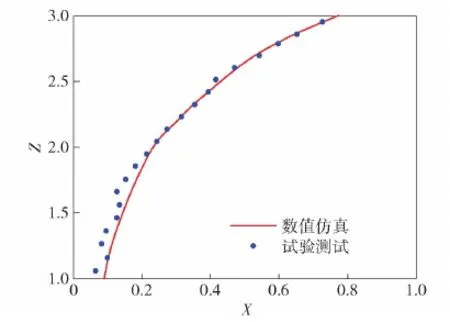
图6 水下弹道曲线对比Fig.6 Comparison of ballistic curves

图7 航行体偏转角曲线对比Fig.7 Comparison of deflection angles
在航行体出筒时刻,逸出的筒口气团对航行体产生遮挡,导致对高速相机拍摄图像中航行体元素的识别提取精度产生干扰。将实验与数值模拟结果进行对比,水下弹道最大存在8.3%的误差,偏转角最大存在4.7%的误差,可以认为该数值计算方法已达到要求的精度。
2 结果讨论与分析
2.1 尾涡结构演变机制
在横向来流影响下,首发航行体以一定攻角状态离开发射管口。正是由于攻角作用,在首发航行体尾流中出现了一种类似发卡涡形态的流动结构,该涡结构由涡环与两条涡管组成。图8显示了横向来流U=0.25、时间间隔ΔT=0.5、首发航行体竖直位移Z1=2、等值面λci=-2.5的尾涡云图。

图8 尾涡云图和表面速度矢量图Fig.8 Evolution of the wake vortexstructure and surface velocity vector
在横向来流作用下,首发航行体背流侧中心线附近形成了两条展向涡,并沿着展向和轴向拉伸。当展向涡沿轴向拉伸过程中,形成了反向旋转流向涡对,导致在航行体尾流区形成发卡形的弧状结构涡,即为涡结构的头部,而两侧为涡结构的腿部。如图8所示,在涡头形成过程中,由于反向旋转流向涡对作用,在流向涡对之间堆积低速流体而形成低速条带区域。该发卡形涡结构通常以多个共同组合的形式存在于航行体尾部的流场区域中。
在此基础上,开展了ΔT=0.5、ΔT=1.0、ΔT=1.5、ΔT=2.0共4种发射时间间隔下首发航行体尾涡结构演变对次发航行体流动干扰特性研究。图9所示为次发航行体离筒时刻首发航行体的尾涡结构演变过程,Z2为次发航行体竖直位移。随着发射时间间隔的增大,沿着首发航行体尾流区形成多级涡结构,涡结构尺寸不断增大,形态结构不断发展。在横流效应下首发航行体尾流区涡结构由次发航行体上游逐渐转移到下游。在此过程中,次发航行体经历了首发航行体尾流区涡结构的涡头中心位置以及下游区域。当次发航行体经过首发航行体尾部区域产生的涡结构的不同位置时,会受到不同程度的流体动力干扰。如图10所示,在ΔT=0.5时,次发航行体被首发航行体尾流区涡结构完全包裹,并沿着其中低速条带穿过。由于涡结构尺度相对较小,多级涡头发生断裂现象。在ΔT=1.0,尾涡结构进一步得到发展,次发航行体表面大部分被涡结构包裹。随着发射时间间隔增大,在ΔT=1.5时,尾涡结构和次发航行体逐渐远离,次发航行体受到的扰动不断减小。最后在ΔT=2.0,尾涡结构得到充分发展并发生夹止,次发航行体基本不受扰动。
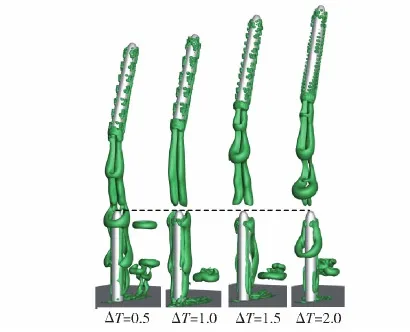
图9 不同发射时序航行体尾涡结构演变 (U=0.25, Z2=1)Fig.9 Evolution of the wake vortex structure of the vehicle at different launch sequences (U=0.25, Z2=1)
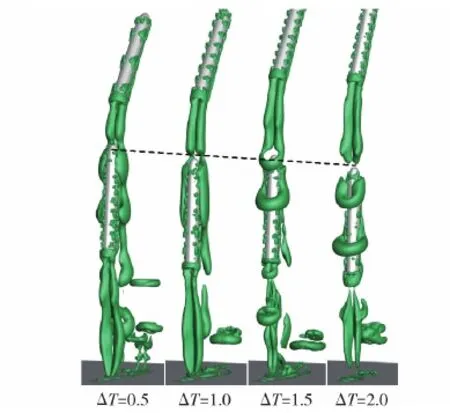
图10 不同发射时序航行体尾涡结构演变 (U=0.25, Z2=2)Fig.10 Evolution of the wake vortex structure of the vehicle at different launch sequences (U=0.25, Z2=2)
2.2 次发航行体表面压力分布特性
在横流效应下,航行体表面压力出现了明显的不对称分布,迎流侧压力大于背流侧,如图11和图12所示。然而,此时首发航行体产生的尾涡并未对次发航行体表面的压力分布特性产生显著的影响规律,但是次发航行体被覆盖部位的压力明显小于未受扰动状态。此时航行体刚好完全出筒,迎流面压力略大于背流面。
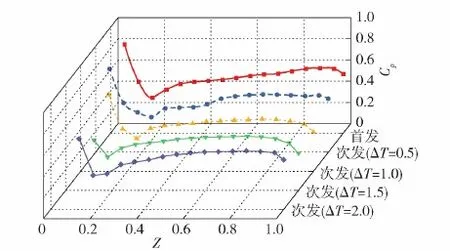
图11 不同发射时序次发航行体表面迎流侧压力 曲线对比(U=0.25, Z2=1)Fig.11 Comparison of surface pressure curves on the flow facing side of secondary vehicles with different launch sequences(U=0.25, Z2=1)

图12 不同发射时序次发航行体表面背流侧压力 曲线对比(U=0.25, Z2=1)Fig.12 Comparison of surface pressure curves on the side facing against the flow of secondary vehicles with different launch sequences (U=0.25, Z2=1)
如图13和图14所示,随着航行体不断运动,迎、背流面压力演变过程更加明显。当发射时间间隔为ΔT=0.5,次发航行体迎、背水面压差较小,近似为等压面。主要原因是:此时次发航行体穿越尾流区涡结构中心区域,其中心区域存在一条等压低速条带。随着发射时间间隔的增大 ΔT=1.0和ΔT=1.5,涡结构在横流作用下不断移动,导致次发航行体迎、背水面压力不断增大。
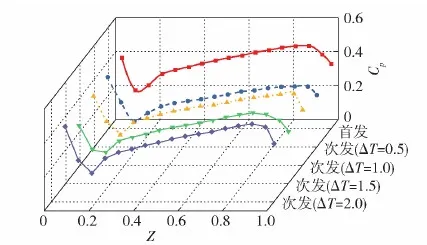
图13 不同发射时序次发航行体表面迎流侧压力 曲线对比(U=0.25, Z2=2)Fig.13 Comparison of surface pressure curves on the flow facing side of secondary vehicles with different launch sequences (U=0.25, Z2=2)

图14 不同发射时序次发航行体表面背流侧压力 曲线对比(U=0.25, Z2=2)Fig.14 Comparison of surface pressure curves on the side facing against the flow of secondary vehicles with different launch sequences (U=0.25, Z2=2)
2.3 次发航行体弹道与姿态演变特性
在水中航行初期,不同发射时序下次发航行体弹道、姿态角与无干扰状态近似一致。如图15和图16 所示,无干扰状态航行体受横流影响,弹道沿水平方向偏移并发生俯仰运动。其中偏移量约0.75l,俯仰角度约为40°。

图15 不同发射时序下弹道曲线Fig.15 Trajectory curves under different launch sequences
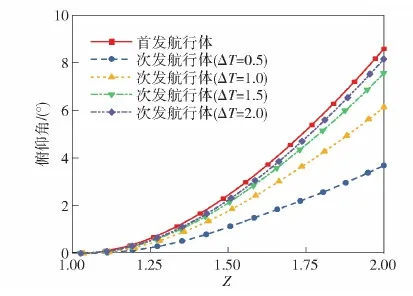
图16 不同发射时序下俯仰角曲线Fig.16 Pitch angle curves under different launch sequences
随着发射时间间隔的增大,弹道曲率减小,俯仰角度曲线曲率增大。在ΔT=0.5,相同竖直位移条件下,水平位移和俯仰角度相比无扰动状态最小,运动姿态更加稳定。在ΔT=1.0和ΔT=1.5,水平方向偏移量和俯仰角度相比ΔT=0.5不断增大。在ΔT=2.0,次发航行体弹道和俯仰角度与无干扰状态近似一致。由于发射时间间隔的较大,当首发航行体运动至边界时,次发航行体弹道和俯仰角的变化历程不完整。
3 结论
为了研究不同发射时间间隔下航行体水下连续发射过程流动干扰特性,本文基于可实现的k-ε湍流模型和能量方程,VOF方法和重叠网格零间隙技术,开展了数值方法和网格无关性验证。在此基础上,研究了航行体连续发射过程中尾流区涡结构演变机理、航行体迎流面和背流面压力分布、水动力参数、弹道以及俯仰姿态演变规律。得出以下主要结论:
1)航行体尾流区域中发现了类似发卡形的涡结构。其典型结构特征为展向的涡头和两个反向旋转的涡腿。通常多个发卡形涡结构以共同组合的形式存在于航行体尾部的流场区域中。
2)航行体尾涡结构中,喷射事件发生于同一涡结构两个涡腿之间的低速流域;扫掠事件发生于单个涡腿或相邻涡腿外侧的高速流域;沿着流向的涡结构内部形成了一定流向尺度的低速条带区域。
3)当次发航行体处于首发航行体尾迹区涡结构不同位置时,航行体受力、弹道及俯仰姿态角等参数有较大的差别,特别是次发航行体穿过涡结构内低速条带区域时,其表面压力分布与弹道稳定性有较大的改善作用。当发射时间间隔较大时,次发航行体表面压力分布与运动姿态受干扰程度逐渐减小,直至与首发航行体基本一致。
