基于实测载荷谱的三维路面重构方法
2023-11-15邹喜红周玉婷周雨航肖谕凯付凌锋
邹喜红,周玉婷,周雨航,肖谕凯,周 擎,付凌锋
(1.重庆理工大学 汽车零部件先进制造技术教育部重点实验室,重庆 400054;2.重庆清研理工汽车检测服务有限公司,重庆 401329)
0 引言
车辆行驶时,路面不平度是其主要输入激励,直接影响着车辆零部件寿命、车辆平顺性等重要指标[1]。随着三维路面重构成为车辆虚拟试验技术的发展趋势,如何准确描述路面不平度也成为三维路面重构的关键[2]。为此,国内外学者进行了相应研究。胡志刚[3]基于随机道路不平度功率谱密度,采用分数布朗运动理论对标准等级二维路面进行数值描述,在此基础上重构三维路面。张哲等[4]基于谐波叠加法,建立了考虑轮辙相干性的二维随机路面数值模型。Tasci等[5]通过激光扫描仪扫描获取比利时路面不平度,并运用ADAMS进行仿真。魏亚等[6]采用移动最小二乘法对扫描的点云数据进行预处理,通过试验表明该方法可以提高路面模型精度。王宏伟等[7]使用有限元法提取路面节点信息,通过编写程序获取标准等级路面不平度序列,最终重构了路面。Yousefzadeh等[8]构造了神经网络模型,使用汽车的动态响应信号对神经网络进行训练,完成了路面不平度反求。
现有研究中主要通过数学理论描述、使用路面不平度仪测量、结合某些模型及算法求出路面不平度。基于数学理论重构三维路面的方法较复杂,且大多只能对标准路面进行描述;通过三维测量技术获取路面不平度的准确性高,但存在成本高、周期长、试验场通常不轻易允许企业扫描、扫描出的数据庞大且不易处理等问题;通过某些模型及算法获取路面不平度具有效率高的优点,但大多只限于用仿真出的车辆响应数据反求出二维路面,不能充分反映车辆实际行驶的路面情况。因此,本文中结合车辆实际行驶载荷谱和BP神经网络模型,研究基于实测载荷谱的路面不平度反求方法,完成三维路面重构。
1 实际行驶载荷谱采集
与三维路面重构相关的数据主要有簧上及簧下的加速度、速度、位移、悬架位移等。其中,簧上和簧下加速度及悬架位移等均需通过测试系统进行采集,而速度和位移信号不易直接采集,故选择通过实测加速度载荷谱进行积分获取。本文中选取电容式加速度传感器获取加速度信号,悬架相对位移信号采用拉线式位移传感器获取[9]。传感器安装位置及各信号用途如表1所示。布置好各传感器后在某试验场对某车进行各个特征路况下的载荷谱采集。

表1 传感器安装位置及各信号用途
为探索基于实测载荷谱的路面反求方法,需从中选取一些特征路况载荷谱以便后续分析。选取路况遵循以下原则:取试验场的典型路面;所选路面的不平度应具有明显差异,以便于进行对比验证;选取匀速直线行驶工况,以便于建立路面模型和后续分析。最终选取的路面及工况如表2所示。部分实测簧下加速度载荷谱如图1所示。
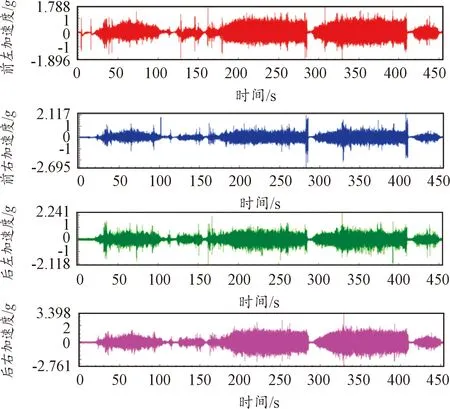
图1 部分实测簧下加速度载荷谱
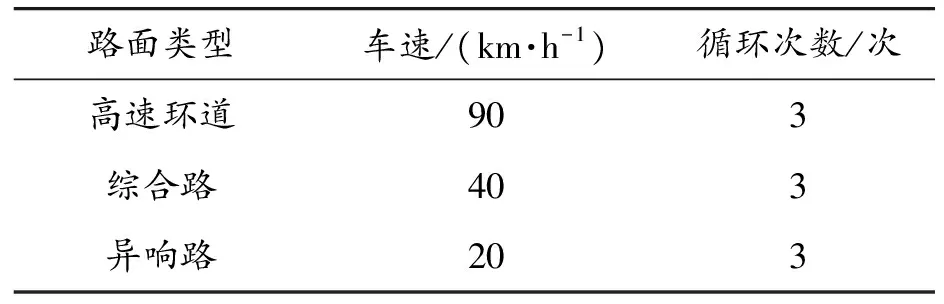
表2 选取的路面及工况
2 基于BP神经网络的路面反求模型
通过车辆响应载荷谱反求路面不平度,若使用BP神经网络来建立车辆响应和路面不平度之间的关系,就需要建立整车与路面模型进行仿真,为神经网络提供训练及验证数据。
2.1 车辆7自由度路面输入振动模型
路面不平度作用于车辆的激励以垂向方向为主,应重点关注建立整车模型时其垂向自由度。建立7自由度整车模型如图2所示。模型由车身、4个车轮及悬架组成,分析时忽略数值很小的轮胎阻尼系数[10],相关参数如表3所示。

图2 7自由度整车模型
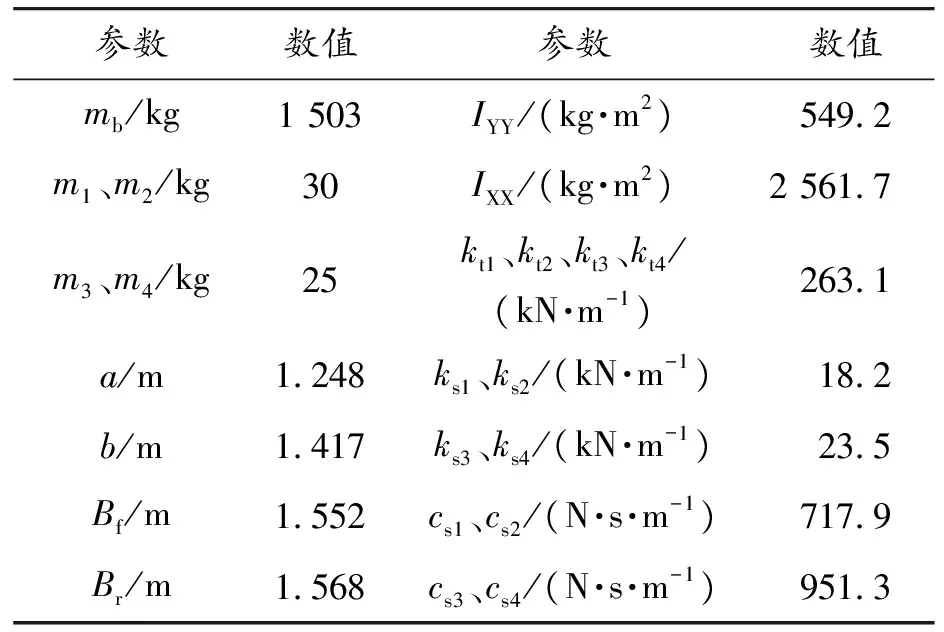
表3 整车模型参数
图2中,下标1、2、3、4 分别代表左前、右前、左后、右后轮;zb为质心处垂向位移,z为车轮垂向位移;θb为俯仰角;φ为侧倾角;q为路面输入垂向位移;mb为簧上质量,m为簧下质量;Bf为前轴轮距,Br为后轴轮距;a为质心至前轴距离;b为质心至后轴距离;ks、kt分别为悬架、轮胎刚度;cs为悬架阻尼系数;IXX、IYY分别为侧倾、俯仰转动惯量。
侧倾角和俯仰角较小时,4个垂直位移、车身质心处及4个车轮垂向运动、车身俯仰及侧倾运动关系矩阵为
(1)
路面不平度时域模型建立的方法一般有随机正弦波叠加法、滤波白噪声法和逆傅里叶变换法等[12]。本次四轮路面模型的建立基于单轮路面模型完成,选用计算速度快、精度高的滤波白噪声法。左前轮路面不平度时域模型为
(2)

假设车辆匀速直线行驶,根据左、右轮相关性和前、后轮的滞后性[13-14]可得到右前、左后、右后车轮的路面不平度分别为q2(t)、q3(t)、q4(t),如式(3)—式(5)所示。
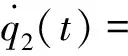
(3)
(4)
(5)
式(3)—式(5)中:B为左右两轮轮距;滞后时间td为车辆轴距L与速度μ的比值。
根据上述理论,运用Matlab/Simulink建立车辆7自由度路面输入振动模型,如图3所示。
图3 车辆7自由度路面输入振动模型
为验证四轮路面模型,以20 m/s车速对四轮路面模型进行仿真。按照GB7031《车辆振动输入——路面不平度表示方法》标准[15],选取B级路面不平度系数几何平均值,使用Welch法计算仿真与标准路面不平度功率谱密度,并以双对数功率谱密度的形式展现(如图4所示),发现仿真B级路面谱基本在标准B级路面范围内,验证了路面模型的有效性。通过车辆7自由度路面输入振动模型,在8个等级路面下分别获取车速20、40、90 km/h,时间为100 s的簧上及簧下加速度信号,为BP神经网络的训练及验证提供数据。图5为B级路面部分加速度载荷谱仿真结果。
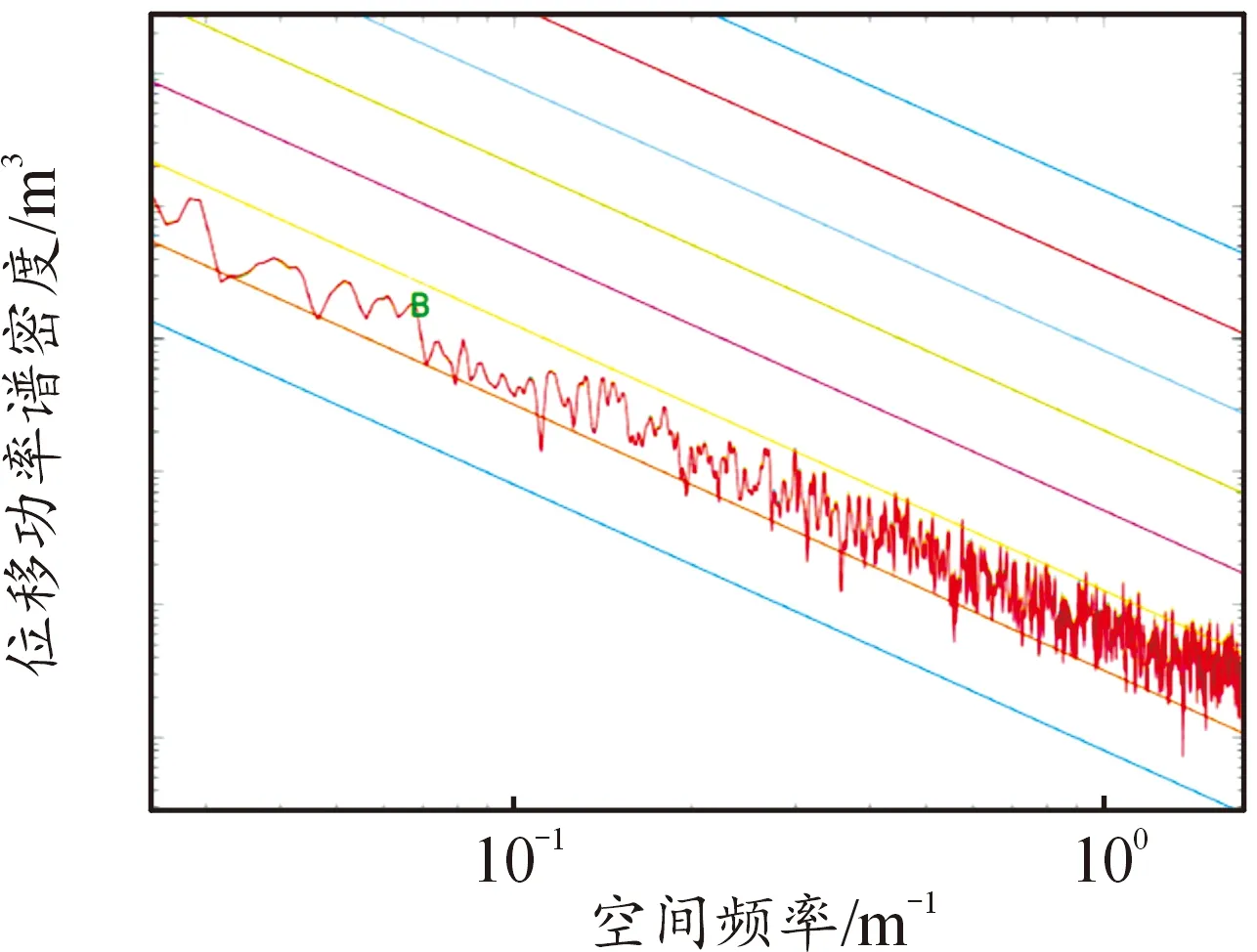
图4 仿真B级路面空间功率谱密度
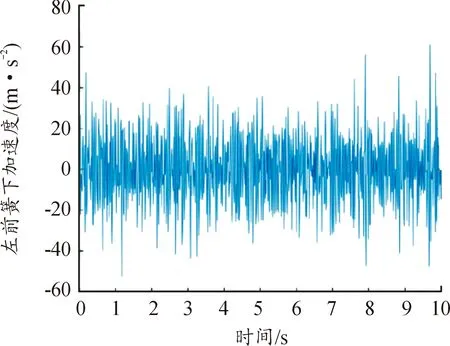
图5 B级路面部分加速度载荷谱仿真结果
2.2 BP神经网络模型及验证
BP神经网络的属性为多层前馈型,被广泛应用于数据预测[16]。BP神经网络的设计过程一般包括网络层数、各层节点数、传递函数、训练函数、初始权值的确定。
BP神经网络网格层包含1个输入层、1个或多个隐含层、1个输出层,多隐含层较单隐含层预测结果更准确,但网格层数越多,训练时间越长。结合本文实际情况,为保证预测路面不平度的计算效率和精度,选择2个隐含层;基于载荷谱采集情况,确定输入层节点数为6,而每个车轮对应1个路面不平度,所以输出层节点数为1,隐含层节点数可根据经验公式(6)确定;输出层隐含层传递函数一般选用Sigmoid函数;训练函数选择最常用、运行速度较快的trainlm函数;初始权值为非零的随机数,经验值大小一般在±2.4/m内。由此可知,初始权值在±0.4之间,初始权值太大或太小都会影响神经网络性能,本次选取初始权值为0.1。
(6)
式中:输出层节点数为n;输入层节点数为m;A是调节常数,取值范围在0~10[17]。
BP神经网络模型设计完成后使用Matlab对其进行训练。将车辆7自由度路面输入振动模型仿真出的前9/10数据用来训练,后1/10数据用来验证。图6为E级路面下左前轮路面不平度预测与期望值。可以看出,预测输出和期望输出在趋势上基本一致,验证了BP神经网络模型的有效性。
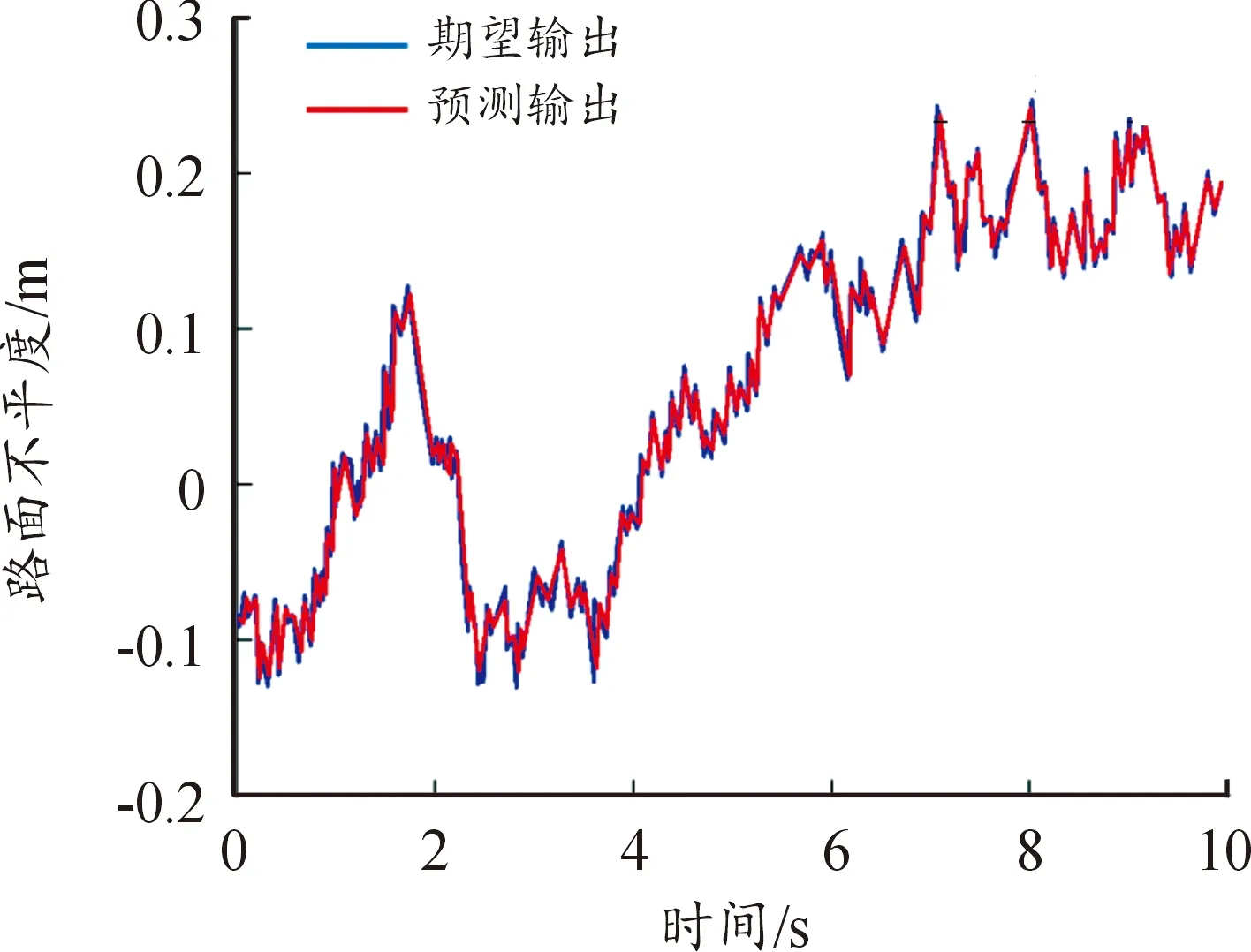
图6 E级路面下左前轮不平度期望值与预测值
3 路面不平度反求
路面不平度反求时需将加速度、速度、位移载荷谱作为神经网络输入。通过实车采集获取加速度载荷谱,通过加速度积分获取速度和位移载荷谱。
3.1 加速度频域积分
将采集的加速度信号分别进行一次、二次积分得到速度和位移。选择频域积分可以有效避免时域积分中干扰信号随积分次数增加而放大,从而造成数据失真的现象[18]。运用傅里叶变换将加速度信号从时域转换到频域,在频域中对信号进行一系列处理后,再使用傅里叶逆变换得到时域信号。
设信号an的数据个数为N、频率分辨率为Δf,其傅里叶变换及逆变换为
(7)
(8)
设加速度信号为an,经傅里叶变化为A(k),频域积分1次后得到速度V(n)
(9)
进行二次积分得到位移S(n)为
(10)
(11)
式中:H(k)为滤波器的频响函数;fd和fu分别为下截止频率和上截止频率。
由式(9)—式(11)可知,相较于高截止频率,低截止频率对频域积分的准确性影响更大,故应合理选取低截止频率。以高环路为例,分别以0.2、0.3、0.4、0.5 Hz低截止频率和150 Hz高截止频率对加速度信号进行积分,结果如图7所示。
由图7可以看出,相较于速度,使用不同低截止频率进行频域积分对位移结果影响更大。为保证位移结果的有效性,使用不同低截止频率,将簧上及簧下加速度积分出的位移相减得到悬架相对位移,再将悬架相对位移与实测悬架相对位移进行对比,从而验证频域积分的有效性。使用平均峰值误差、平均最大相对误差及平方和误差对不同低截止频率积分计算出的相对位移与实测相对位移进行计算。计算结果如表4所示。根据计算结果,最终选取0.5 Hz作为低截止频率进行频域积分获取簧上和簧下的速度、位移信号。

表4 不同低截止频率积分悬架相对位移误差
3.2 路面不平度反求与验证
路面不平度反求基于实测载荷谱完成。分别截取综合路50 s、高速环道60 s载荷谱数据,异响路由于路况恶劣车辆保持匀速行驶较难,故截取6 s数据,将各路面下实测簧上和簧下加速度及频域积分出的速度、位移信号作为BP神经网络的输入,进而反求出相应的路面不平度。其中,综合路路面不平度反求结果如图8所示。
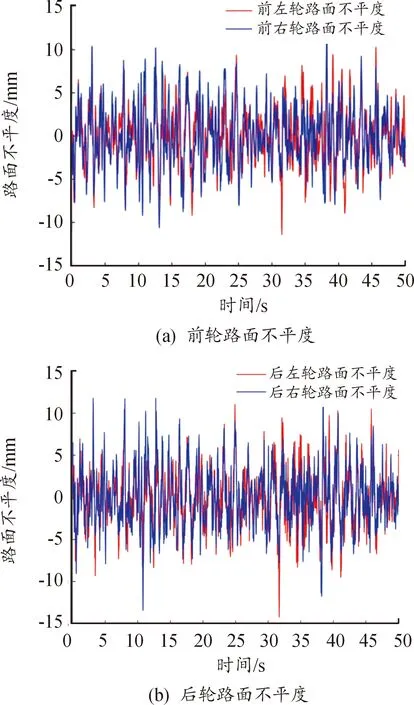
图8 综合路路面不平度反求结果
为验证路面不平度反求结果的有效性,将综合路反求结果输入7自由度整车模型,将仿真输出的簧上及簧下的加速度与实测载荷谱进行对比,其中左前轮结果如图9所示。可以看出,两者的趋势基本一致。对加速度均方根值相对误差进行计算,进一步验证反求结果的有效性,计算结果如表5所示。实测与仿真输出的簧上及簧下加速度相对误差均在8%以下,簧下相对误差均在4%以下,验证了基于实测载荷谱反求路面不平度的有效性。
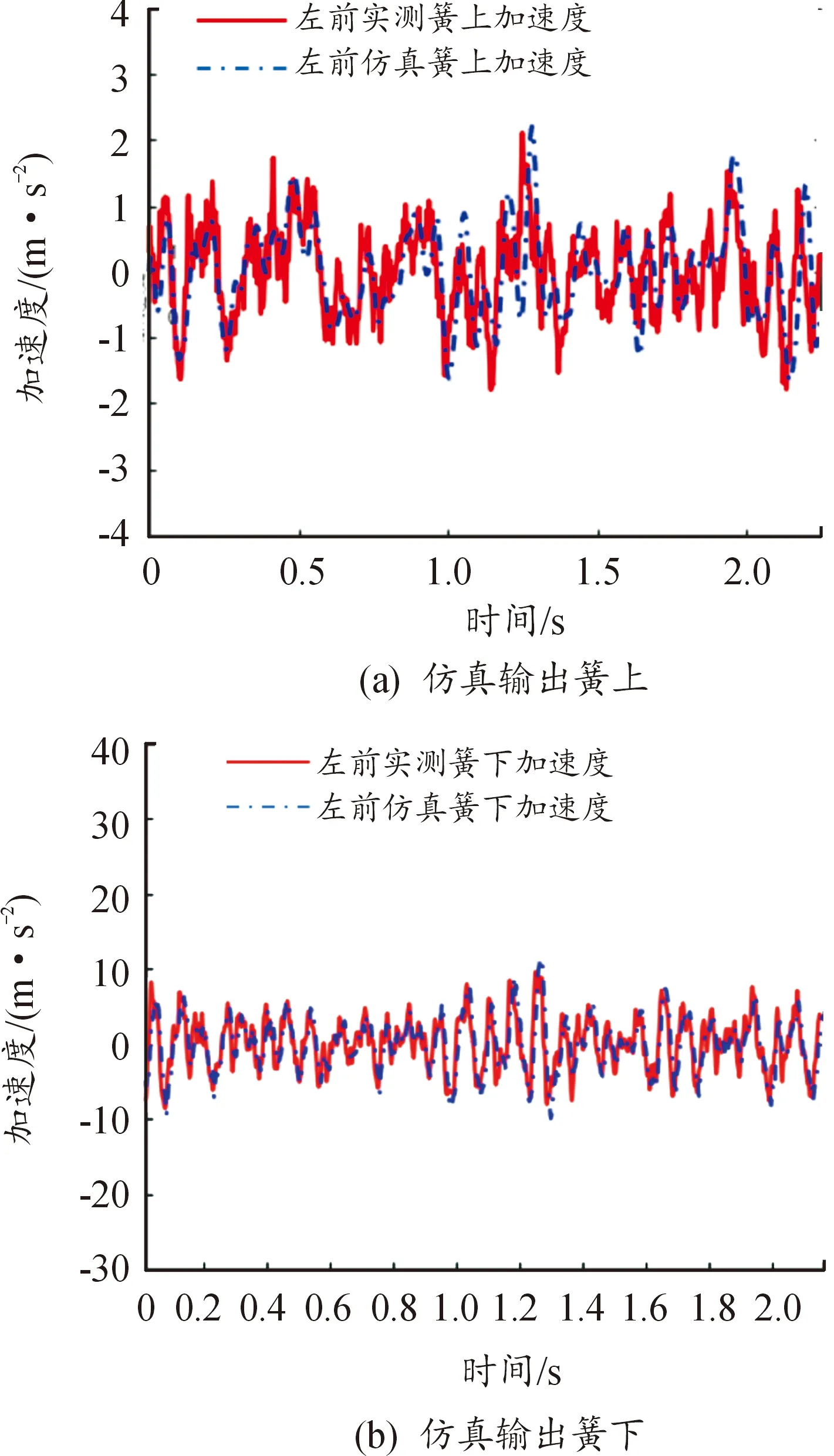
图9 左前轮仿真输出结果与实测结果
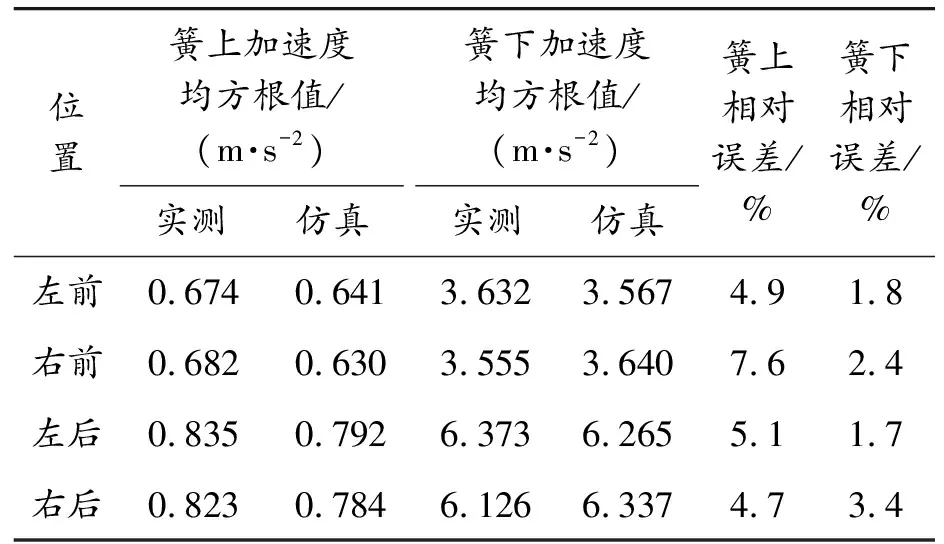
表5 实测与仿真输出簧上及簧下加速度均方根值相对误差
4 三维路面重构
基于反求出的路面不平度进行三维路面重构,左右轮路面不平度之间存在差异,路面较复杂,因此选择3D等效容积路面[19]作为三维路面,其能较好地表达复杂路面。
基于路面节点Node和三角单元信息Element建立3D等效容积路面模型,使用三角网格法完成重构。将3D等效容积沿路面宽度方向进行拓展,并规则化路面网格在水平面的投影,如图10所示。

图10 路面网格在水平面投影
步骤1节点编号aij:aij=jNx+i,(i=1,2,…,Nx,j=1,2,…,Ny);
步骤2纵坐标xij:xij=Δx(i-1);
步骤3横坐标yij:yij=Δy(j-1);
步骤4路面高程zij:对第3节路面不平度反求结果进行重采样赋予,用于左、右半路面。
横、纵向采样间隔选取为0.1 m,路面宽度为5 m,截取反求出的高速环道500 m和综合路94.4 m数据。由于仿真时车辆需要一定路长才能使车速稳定到目标车速,而前文选取异响路时间为6 s,仿真时路长太短,故加入等长度B级路面于异响路前面,共66.6 m。根据节点信息生成原理,使用Matlab编程进行网格划分并获取Nodes和Element信息。图11为网格划分结果。
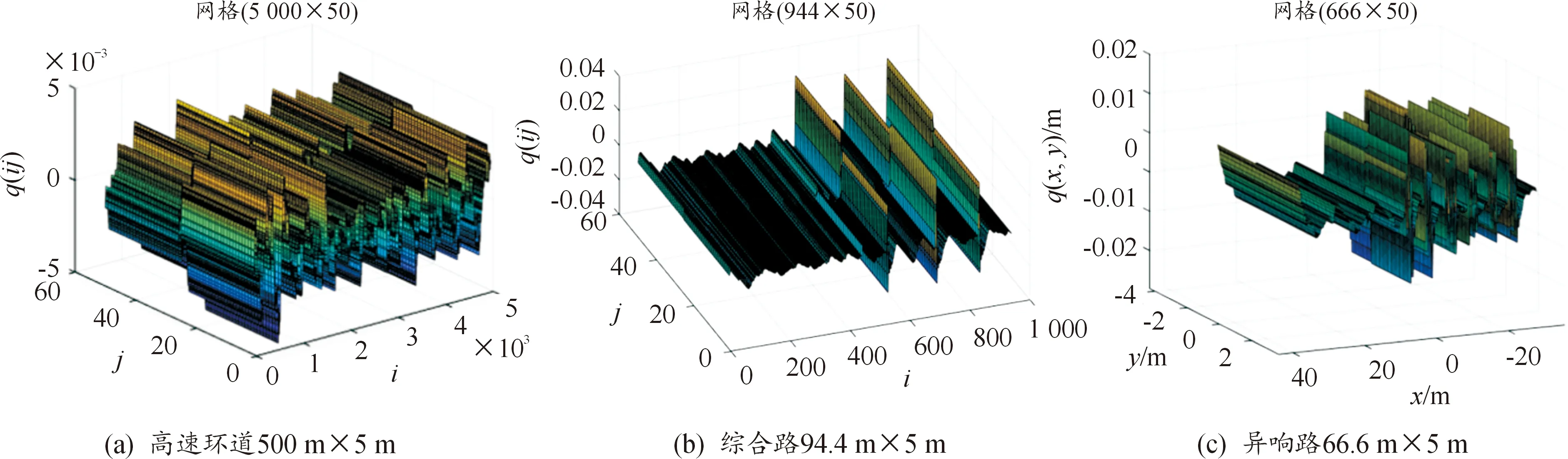
图11 网格划分结果
在3D等效容积路面文件中写入获取的Node和Element信息,将完成后的路面文件导入Adams路面库,完成路面重构。图12为路面重构结果局部放大图。
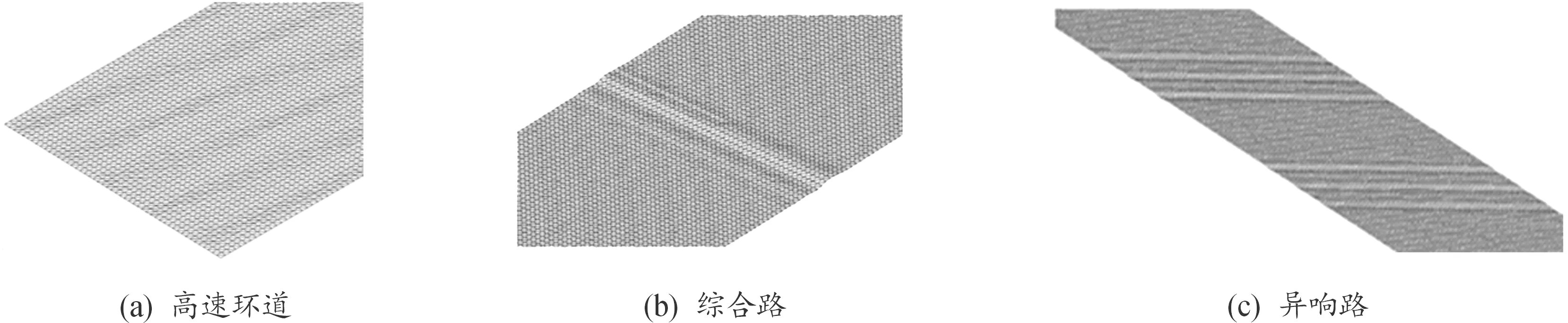
图12 路面重构结果局部放大图
5 结论
1) 基于BP神经网络建立路面反求模型,以车辆7自由度路面输入振动模型标准等级路面下的输出响应对BP神经网络进行训练与验证,结果表明:预测输出值和期望输出值在趋势上基本一致,验证了BP神经网络反求路面不平度的有效性。
2) 使用不同低截止频率对加速度载荷谱进行频域积分,将积分获取的悬架相对位移结果与实测载荷谱进行对比,发现选取0.5 Hz作为低截止频率进行频域积分时,相对位移误差最小。
3) 将实测加速度载荷谱及积分结果输入反求模型,获得二维路面不平度;将二维路面输入至车辆7自由度路面输入振动模型中,仿真得出的簧上及簧下加速度与实测对比相对误差在8%以内,验证了路面谱的有效性。
4) 为探索基于实测载荷谱反求路面不平度方法,仅选取了3种典型路面下的匀速直线路面载荷谱进行分析及验证,未来将加入其他路面的复杂工况进行路面反求,验证该方法的普遍适用性。
