空间站太阳翼振动测量中的动态杂光快速仿真方法
2023-11-13张国琪张锦江刘启海郭朝礼
郎 燕, 张国琪, 张锦江, 刘启海, 郭朝礼, 李 林
1. 北京控制工程研究所, 北京 100094
2. 空间智能控制技术全国重点实验室, 北京 100094
0 引 言
空间站是一类特殊的大型航天器,其任务需求多、功能复杂和可靠性要求高,还配备了规模庞大的各类平台设备和科学载荷,这对空间站的供电能力提出了极高要求,只有大尺度的太阳电池阵面才能满足能量转换需求.因此在轨可伸展的大型柔性太阳翼应运而生,在国际空间站、中国空间站[1-2]上均得到了应用.柔性太阳翼结构动力学的模态阶次高且密集、频率低且阻尼特性复杂,其参数的准确性对空间站实现高性能、强鲁棒的姿态和轨道控制性能具有重要意义[3-5].由于天地环境差异,在轨对柔性太阳翼开展振动测量和动力学参数辨识是获取高精度模态参数的重要手段[6-7].
基于视觉的振动测量技术[8-9]作为一种不影响被测对象功能完整性的非接触位移测量方式,具有全视场覆盖可测、全模态参数(频率、阻尼和振型)可获取的显著优点,已广泛应用于哈勃望远镜[10]、和平号空间站[11-12]、国际空间站[13-16]和日本GOSAT卫星[17-18]的太阳翼等挠性部件辨识试验中.但这一技术的局限性是对光照条件敏感,一旦太阳光、月光和地气光等环境光直接进入相机视场,将引起图像过亮甚至饱和,导致信噪比下降而无法准确提取出特征目标[19-22],长时间的强光直射还可能对相机内部的图像探测器及相关电路产生不良影响.因此,根据空间站运行轨道和姿态、相机视场和安装方位以及日月的星历,对全轨道周期内环境光与相机视场的相对关系进行遍历仿真,可实现对任务期间视觉测量方式可用性的精确评估,为在轨任务的合理安排提供依据.
通常利用STK软件可实现上述主要功能,即通过软件给出的全轨道周期内太阳、月球、地球矢量与相机光轴之间的夹角,可判断上述环境光是否进入相机视场.但缺点是无法直接对地气光等面光源进行仿真,而且假定航天器为刚体.由于空间站太阳翼的柔性阵面面积大(核心舱单侧太阳翼可达67 m2,如图1所示)且模态频率低、阻尼小,空间站姿态和轨道控制过程中执行机构的动作将使得阵面产生较大的、持续一定时间的动态变形,变形持续时间与执行机构动作时长、扰振水平及模态阻尼等均有关系.由于大面积太阳翼柔性阵面对光照有一定遮挡效果,同时其动态振动变形也使得太阳光、月面光和地气光经阵面反射后进入相机视场的轨迹在动态变化,因此基于STK的杂散光仿真无法满足需求.Light Tools、Trace Pro和FRED等商用软件具有专业、精细的杂光仿真能力[20-21],在多个给定的入射光源角度下,可设定数百万乃至上亿条光线轨迹对光学系统几何模型进行遍历打靶分析,可模拟面光源仿真,但由于计算量大且大量传播路径为无效运算而使得仿真效率较低.
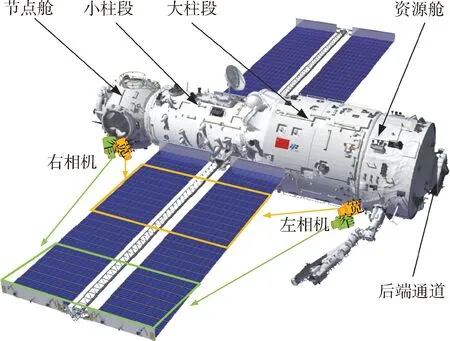
图1 中国空间站核心舱太阳翼阵面及视觉测振示意图
针对空间站大型柔性太阳翼振动测量相机的杂散光分析需求,为解决现有仿真方法的不足,本文提出了一种动态杂散光的快速仿真方法,实现了带大挠性附件的航天器姿态、轨道动力学模块和日月星历模块的仿真环境,基于全轨道周期下3种环境光源与相机光轴夹角关系、大面积柔性阵面的动态振动位移的模拟,从日月地3类光源特性(点光源、面光源)、杂光干扰途径(直接入射、经太阳翼一次反射后再入射)出发给出了大幅降低运算量的动态杂光判别算法,大大提升了杂光轨迹随被测对象动态变化时的仿真效率.
1 动态杂光分析需求
1.1 杂光问题定义
本文拟对3类杂光来源进行分析,分别是太阳光、月光和地气光,前两种按点光源处理,第三种按面光源处理.考虑一般杂光经漫反射、多次反射后进入相机视场时不会对成像效果造成干扰,因此本文主要考虑以下两种杂光干扰途径:1) 杂光直接进入测振相机视场;2) 杂光经太阳翼阵面一次镜面反射后再进入测振相机视场.
1.2 杂光仿真系统组成
针对入射杂散光受振动测量对象——柔性太阳翼的形变影响而动态变化的问题,杂光仿真系统包括两大模块,如图2所示.其一是动力学模块,分为4个部分:1)姿态和轨道动力学,用于模拟空间站在轨道上的飞行状态;2)日、月星历系统,用于模拟日、月与空间站的相对关系以生成太阳光、月光的入射方向;3)测振相机参数和安装模型,用于模拟相机观测范围和光轴与空间站本体的相对关系;4)太阳翼有限元模型,用于模拟太阳翼阵面各节点在空间站执行机构动作过程中的三维位移坐标变化情况.其二是杂光分析算法模块,即本文论述的重点,通过动力学模块实时输出的空间站姿态、地心距、太阳矢量、地球矢量、月球矢量、相机安装参数和太阳翼有限元节点三维坐标等信息,计算太阳光、月光和地气光3类光源在直接入射和一次反射后两种条件下与相机光轴的夹角,并结合太阳翼遮挡判断,最终对全轨道周期下杂光进入相机视场的裕度给出遍历性结论.
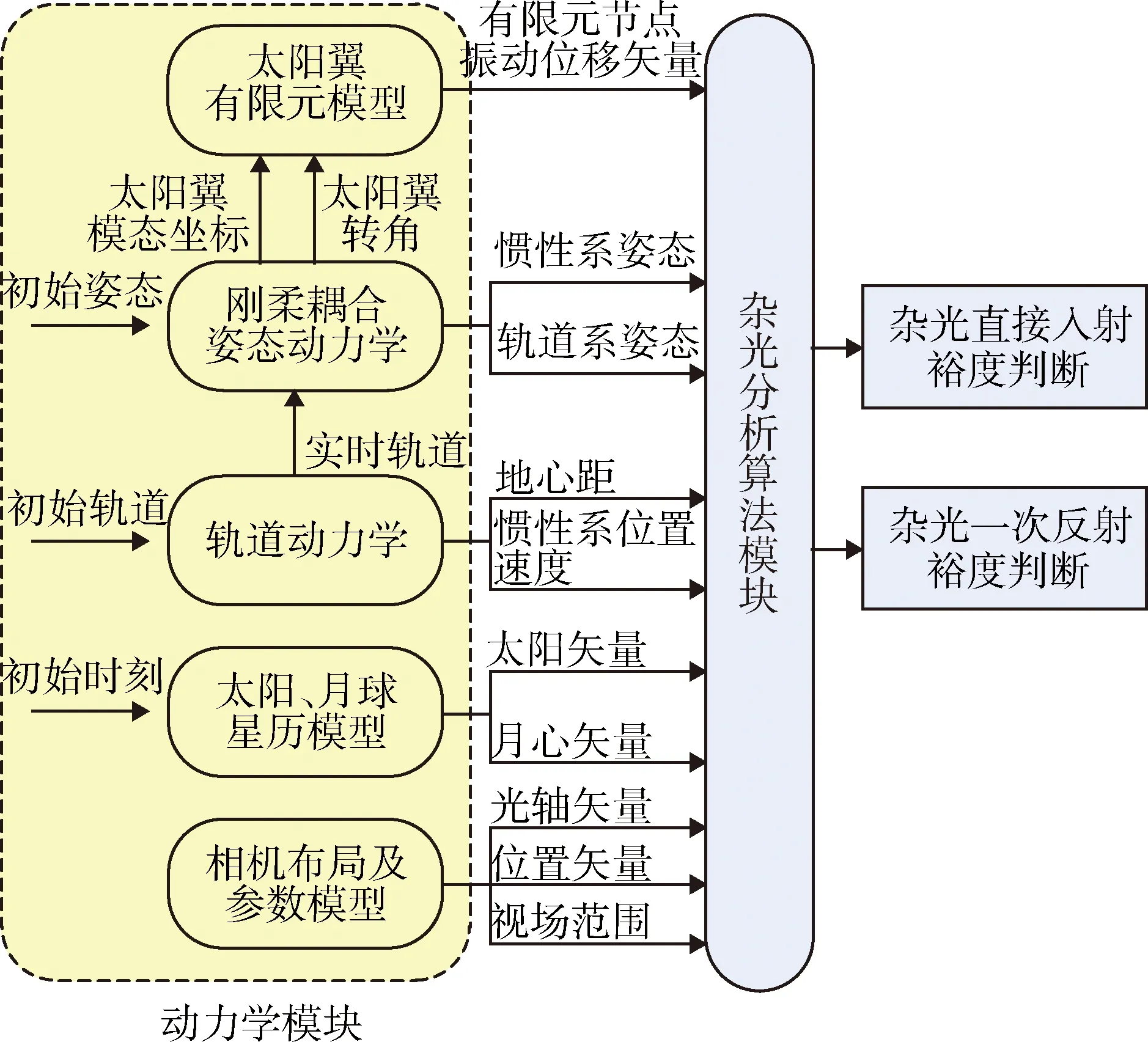
图2 动态杂光分析仿真系统组成
2 动态杂光分析算法
2.1 算法基本流程
杂光分析算法的基本流程如图3所示.
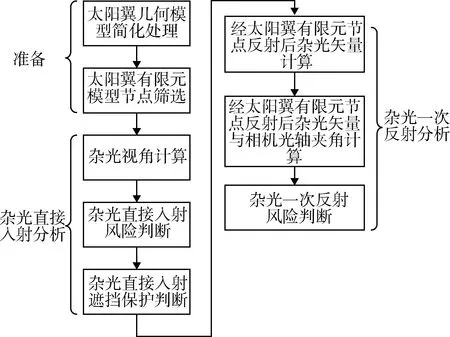
图3 动态杂光分析算法流程图
柔性太阳翼为大型桁架式、多活动部件的可展收薄膜结构,实际构造较为复杂.对此,一方面要对太阳翼几何模型进行简化处理,即保留影响杂光计算结果的主要结构,省略细节部分;另一方面要对简化后的几何模型对应的有限元模型节点进行精简筛选,原则是保留下来的节点可以反映太阳翼阵面主要模态的振型.根据动力学模块的输出,分别进行杂光直接入射分析和杂光一次反射后再入射分析,下面分节论述.
2.2 太阳翼模型简化
对应1.1节所述的两种杂光干扰途径,采用两种太阳翼简化模型.
(1)杂光直接入射简化模型
主要考虑太阳翼对杂光的遮挡效应,而太阳翼挠性振动变形对杂光的遮挡可以忽略,故采用理想的平板模型,如图4所示.中间伸展机构不具有遮挡能力,故该模型只包含两个阵面区域各自的4个角点(1a~1d,2a~2d)在太阳翼坐标系下的位置信息.

图4 空间站核心舱柔性太阳翼简化平板模型图
(2)杂光一次反射后进入简化模型
考虑太阳翼挠性振动变形产生的曲面对杂光的一次反射效果,理论上应基于高密度的有限元模型模拟振动曲面来计算反射光线,但是模型复杂度过高带来大量无意义的计算量,故在图4的阵面1和阵面2区域选取合适数量的有限元节点即可.需要获取被选取的有限元节点在太阳翼局部坐标系下初始位置、模态振型.
2.3 太阳翼有限元节点筛选
对于杂光一次反射后进入简化模型,有限元节点数量筛选的原则是避免杂光干扰漏判.因太阳翼阵面的振动幅值与执行机构的激振强度相关,不同的振动幅值带来的反射效果不同.实际中考虑贴近真实状态,在不同的激振强度下,可首先选取阵面1和2内的全部节点进行遍历仿真,然后以此为基准逐渐增加节点距离间隔,如分析结果与选取全部节点时基本一致,则将该状态下的节点布局作为优选结果,以提升计算效率.
2.4 杂光直接入射分析
首先,计算杂光直接进入测振相机视场引起干扰的条件.杂光反向矢量与相机光轴夹角小于一定阈值,且太阳翼阵面未遮挡住杂光时,杂光具备进入途径.
其次,计算杂光矢量与相机光轴夹角.点光源太阳视角θs取0.5°[23],月球视角θm取0.5°,面光源地气光视角θe与空间站轨道相关,通过地心距R和地球最大半径Re计算如下:
θe=arcsin(Re/R)
(1)
杂光矢量与相机光轴矢量间夹角为
(2)
式中,sx_b泛指空间站本体系下表示的太阳矢量ss_b、月心矢量sm_b和地心矢量se_b,θx_ia泛指空间站本体系下表示的ss_b、sm_b和se_b与相机光轴矢量间的夹角θs_ia、θm_ia和θe_ia,sp_b为空间站本体系下相机光轴矢量.
则杂光直接干扰裕度δz为
δz=θx_ia-(θx+Ψc)
(3)
式中,θx泛指θs、θm和θe,Ψc为相机半视场角.如果δz≤0,则杂光有进入视场可能,需进一步判断太阳翼阵面是否能遮挡住可能进入杂光的区域.
最后,进行遮挡保护判断.采用杂光直接入射简化模型,在相机坐标系下求解相机视场内的杂光进入区各点与图4中阵面1和2区域各顶点连线的单位矢量,然后判断阵面1或2能否覆盖住杂光进入区域,若不能覆盖则认为相机受到干扰.图5给出了相机视场和杂光的3种情况,相机视场圆锥内的杂光部分即为杂光进入区,通过判断杂光进入区弧线上的密集点是否可以全部在阵面1和2的投影内,可确认杂光进入区是否能完全被覆盖.具体分为3个步骤:

注:实线圆为杂光可视范围圆锥的投影,虚线圆为相机视场圆锥的投影,红点为杂光进入区密集点,灰色部分为太阳翼阵面区域
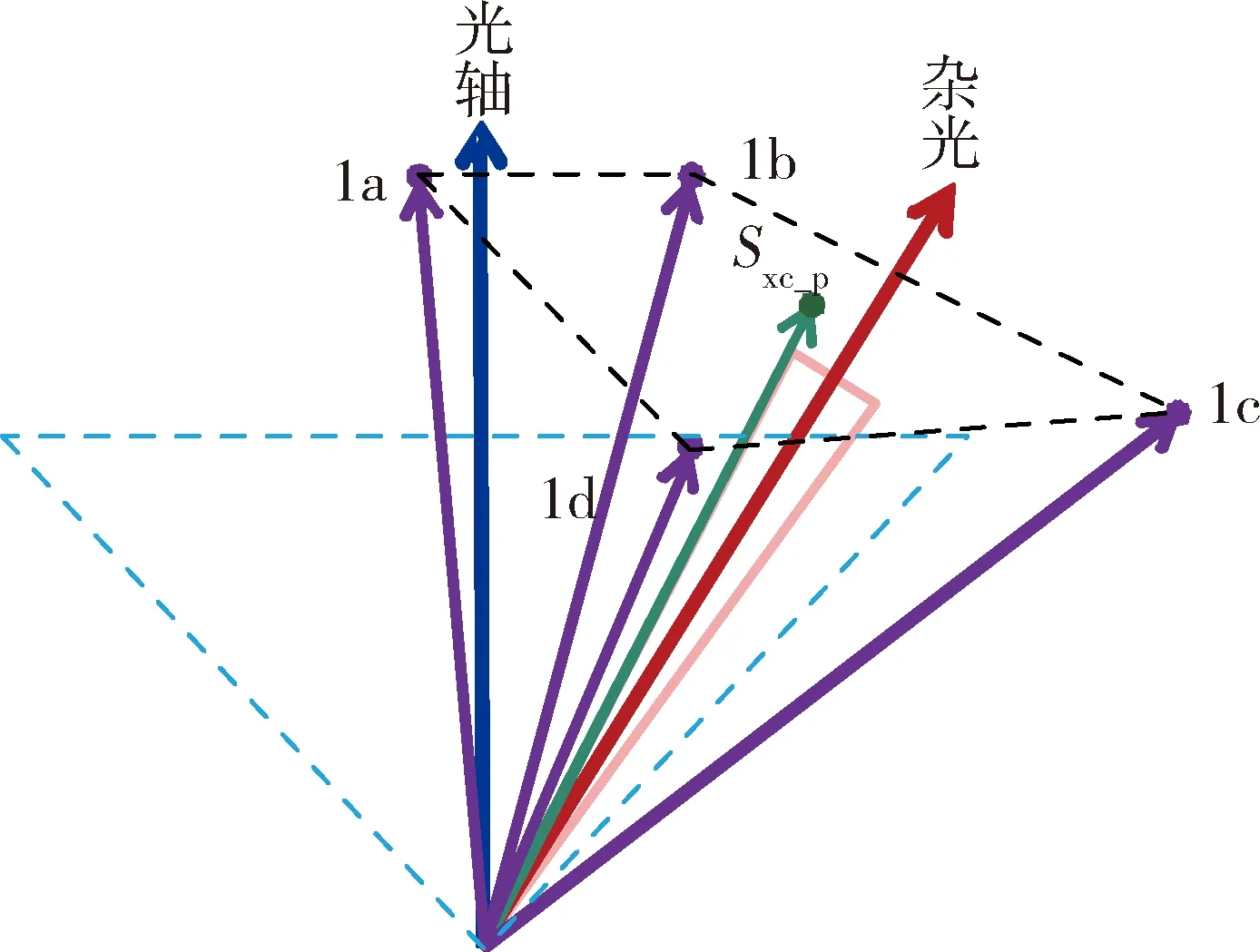
图6 太阳翼对杂光的遮挡判断示意图
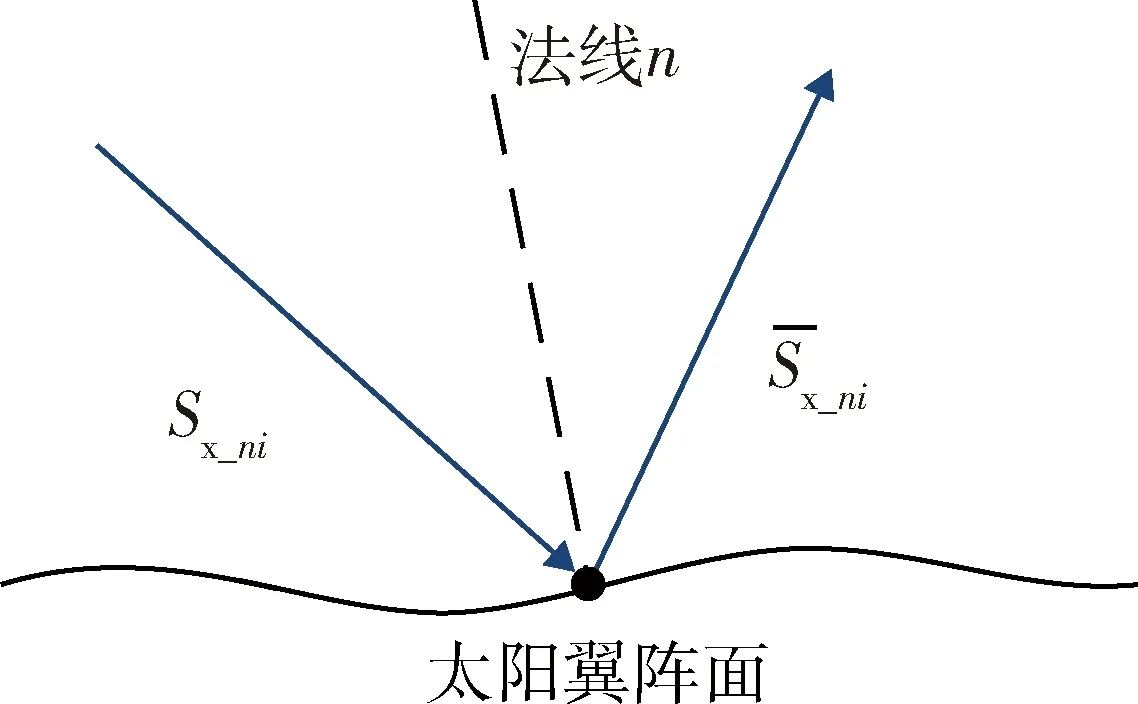
图7 杂光经一次反射后矢量示意图
步骤1.计算相机系下相机视场包络上各点与太阳翼阵面1和2各顶点连线的单位矢量sxj_xx_p
(4)
式中,xx代指1a~1d、2a~2d,Axj_b为相机在空间站本体系下安装矩阵,pxx_b为阵面1和2区域各顶点在空间站本体系下坐标,pxj_b为相机在空间站本体系下位置矢量.
步骤2.计算杂光进入区两侧弧线上的密集点.
首先,判断杂光圆锥与视场圆锥在单位球上的相对关系,然后按图5所示的3种工况分别计算相机系下杂光圆锥和相机视场圆锥的交叉弧线.

(5)
工况2.计算杂光与视场圆锥相交的单位矢量sxc1_p、sxc2_p以及它们绕相机系下的杂光矢量sx_p和相机光轴[0 0 1]T旋转至对方所需的角度θxc12和θxc21.以sxc1_p为例,有如下关系:
(6)
a)sxc1_p→sxc2_p:对应轴角转换参数sx_p和θxc12
sxc2_p=A(sx_p,θxc12)·sxc1_p
(7)
式中,A(s,θ)为旋转矩阵.
b)sxc2_p→sxc1_p:对应轴角转换参数[0 0 1]T和θxc21
sxc1_p=A([0 0 1]T,θxc21)·sxc2_p
(8)
式(7)和(8)均为3个等式,一个未知量,由Matlab求解器算出绝对值小于180°的解.




非上述3种情况时,按下式计算:
(9)

(10)
完成上述相机系下杂光圆锥和相机视场圆锥的交叉弧线计算后,计算交叉弧线上的密集点.
(11)
式中,L=1,2,…360/dθ.一般为提高仿真效率,L不宜过大.
工况2.将θxc12、θxc21划为N份,分别由sxc1_p、sxc2_p绕sx_p,[0 0 1]T旋转N次,每次旋转θxc12/N、θxc21/N角度,得到如下两组矢量即为所求密集点:
(12)
(13)
本文仿真中N取10.
(14)
式中,L=1,2,…,360/dθ.
步骤3.判断所有密集点是否均在太阳翼阵面的投影内.
以阵面1为例,对于给定密集点sx_p,首先求该点与区域1各顶点投影单位矢量(sxj_la_p~sxj_ld_p)所构成平面的法向量snorm_la_p~snorm_ld_p
snorm_xx_p=sxc_p×sxj_xx_p
(15)
式中,xx代指1a~1d.然后计算各相邻法向量的矢量夹角和θsum
θsum=cos-1(snorm_1a_psnorm_1b_p+cos-1(snorm_1b_psnorm_1c_p)+cos-1(snorm_1c_psnorm_1d_p)+cos-1(snorm_1d_psnorm_1a_p)
(16)
如果|θsum-360°|=0°,则认为该点在区域投影内,否则不在.
2.5 杂光经一次反射后入射分析
对杂光经过太阳翼阵面一次镜面反射后进入测振相机视场引起干扰的条件进行分析.经过反射后的杂光反向矢量与相机光轴夹角小于干扰阈值,则杂光具备进入途径.
计算一次反射后的杂光矢量.由于太阳翼振动过程中阵面上各点处的曲面特征均不同,因此杂光经一次反射后的矢量需对筛选出的有限元节点逐个遍历计算.
1) 根据太阳翼有限元模型中各节点的模态坐标和振型计算太阳翼坐标系下各节点实时位置、姿态
pni_f=rni_f+Φniη(t)
(17)
Ani_f=A(Γniη(t))
(18)
式中,pni_f为第i个节点的实时位置,rni_f为太阳翼静止时的节点坐标,η(t)∈RQ为模态坐标,Φni∈R3×Q为平动振型参数,Ani_f为太阳翼坐标系至有限元节点坐标系的转换阵,Γni∈R3×Q为转动振型参数,Q为模态阶数.
2) 将杂光矢量投影到有限元节点坐标系下
sx_ni=Ani_fAf_bsx_b
(19)

(20)
式中,n为杂光在太阳翼阵面反射点的法向量.
判断杂光矢量与相机光轴间的夹角关系.
1) 计算空间站本体系下相机至第i个有限元节点的单位矢量spni_b与相机光轴矢量sp_b间的夹角θpni_ia
(21)
(22)
式中,pni_b为有限元节点在空间站本体系下的坐标.
2) 判断θpni_ia与相机半视场角Ψc的关系.
如果θpni_ia<Ψc,则进行一次反射后的杂光干扰判断,否则认为该节点不会对相机产生反射杂光干扰.杂光一次反射后干扰判断方法如下:

(23)
(24)

3 仿真算例
采用两对双目相机进行杂光仿真验证,分别为宽视场双目和窄视场双目,相机的光轴指向和安装参数如图8所示.
仿真中选择了一组393 km圆轨道,太阳翼尺寸设置为24 m×5 m,软件中装载了模拟的太阳翼有限元模型节点坐标,空间站为三轴对地稳定飞行(控制力矩陀螺控制).利用STK软件选取了一组太阳、月球均不进入相机视场、地球进入相机视场的星历参数,开展了550 s仿真时长.仿真结果如图9~11所示.
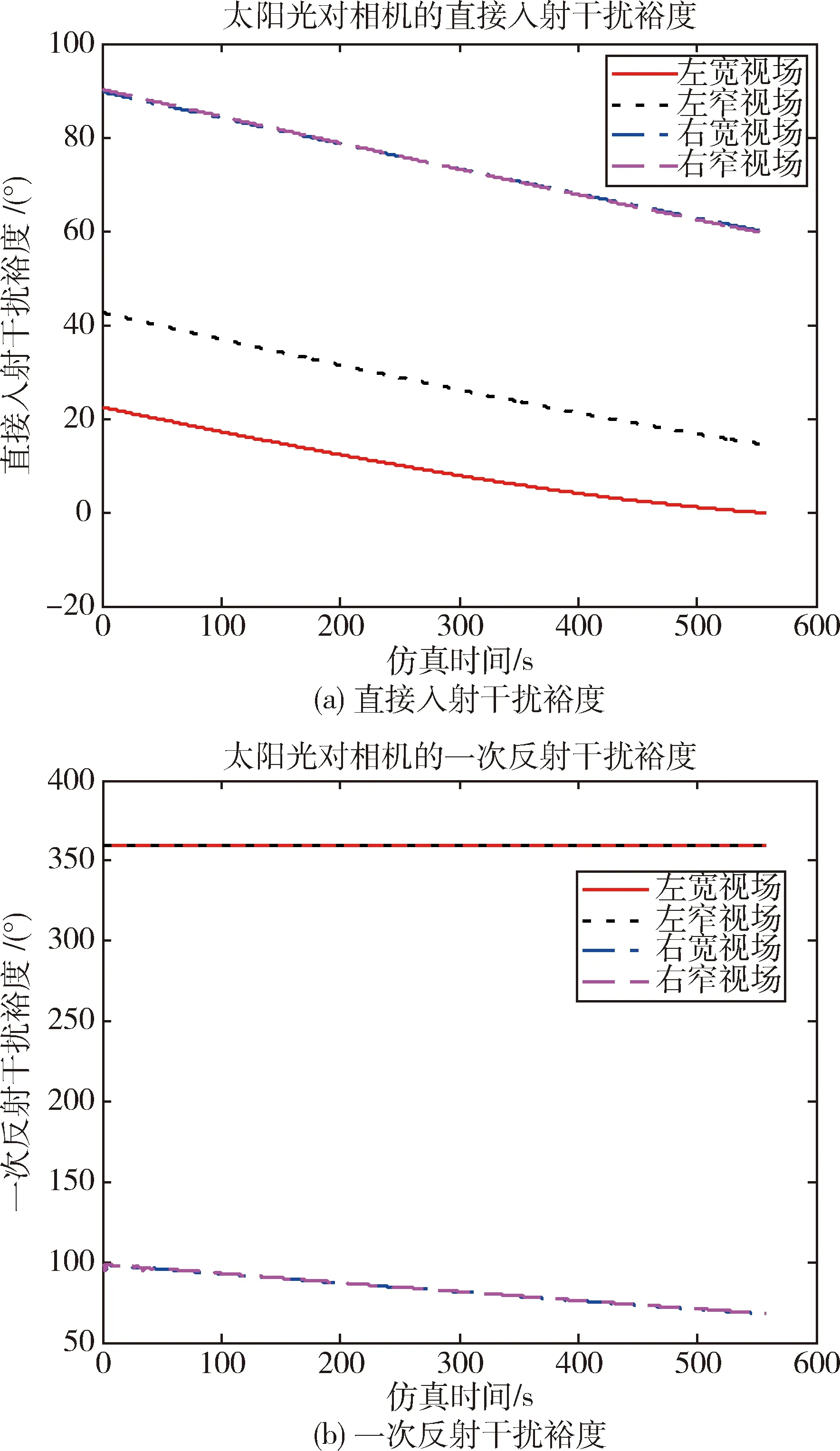
图9 太阳光对4台相机的干扰裕度曲线
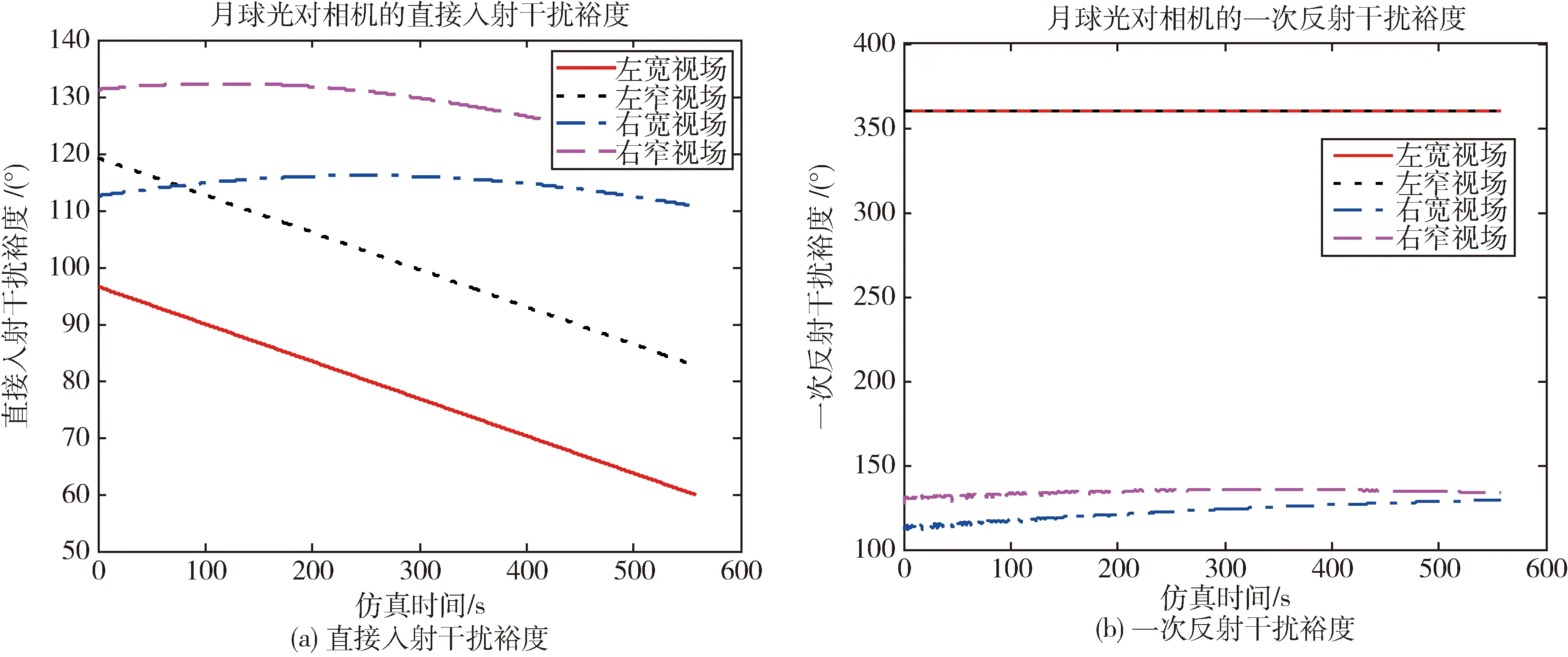
图10 月光对4台相机的干扰裕度曲线

图11 地气光对4台相机的干扰裕度曲线
可见,在本仿真算例下,太阳光和月光对相机的直接入射干扰裕度和一次反射干扰裕度均大于0°,说明太阳光和月光均没有进入4台相机视场的风险.而地气光的直接入射干扰裕度为负值,表明地气光均会进入4台相机视场,与预期一致.
4 结 论
本文对测量相机杂光干扰分析的需求进行了汇总,确定了分析对象、动力学接口、输出格式和待分析工况,在此基础上完成了针对杂光直接进入视场干扰和杂光一次反射进入视场干扰的分析算法设计.自研实现了带大挠性附件的航天器姿态、轨道动力学模块和日月地星历模块的仿真环境,基于全轨道周期下3种环境光源与相机光轴夹角关系、大面积柔性阵面的动态振动位移的模拟,提升了杂光轨迹随被测对象动态变化时的仿真效率.仿真结果表明,该算法的实时性和准确性均可满足大型柔性太阳翼振动测量相机的杂光分析需求.
