基于相邻一维线阵干涉仪阵面的测向补偿算法研究
2021-04-15王开,陈强
王 开,陈 强
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
对辐射源的精确测向是电子战侦察系统的重要任务之一。在现有的测向体制中,干涉仪测向具有结构简单、精度高的优点。按照干涉仪天线阵型可以将干涉仪侧向分为一维线阵干涉仪测向、二维线阵干涉仪测向[1]等,其中二维线阵干涉仪可以测量入射信号的方位角和俯仰角,适用于对信号测量要求高的频段,但相应的成本也较高;一维线阵干涉仪只能测量入射信号的方位角,适用于对信号测量要求不高的频段,但由于一维干涉仪没有俯仰角信息,对有俯仰的入射信号测量存在偏差,导致侦察系统测向精度变差。
本文提出一种基于相邻阵面一维线阵干涉仪测向补偿算法,具有原理简单、计算量小、正确率高的特点,可以提高一维线阵干涉仪对高俯仰目标的测向精度。
1 一维线阵干涉仪测向原理及缺点
一维线阵干涉仪测向原理可以用如图1所示最简单的单基线干涉仪模型[2]来描述,假设图1中2个天线单元间距为D,波长为λ的入射信号方位角为θ,2个天线接收到信号的相位差为:

图1 干涉仪测向基本原理
(1)
可以得到入射信号方位角的计算公式为:
(2)
公式(1)和(2)是在默认入射信号与一维线阵干涉仪天线在同一平面上得到的,即入射信号无俯仰角,但在实际情况中入射信号往往是既有方位角也有俯仰角,此时通过公式(1)和(2)得到的入射信号方位角与实际信号的方位角存在误差,下面分析此误差。
如图2所示,假设入射信号的俯仰角为β,则有:
(3)
(4)

图2 干涉仪方位测量示意图

sinθ′=sinθcosβ
(5)
由于一维线阵干涉仪无法测量入射信号的俯仰角,所以一维线阵干涉仪在测量不同俯仰的入射信号方位角时与实际方位角存在偏差,通过计算观测角度θ′与实际角度θ′的误差曲线如图3所示。

图3 不同俯仰下一维线阵干涉仪方位角测量误差
从图3可以看出:(1)对于俯仰角不为0的入射信号而言,方位角测量值向阵面法向偏移(即偏小),入射信号偏离阵面法线越远则对应方位角测量误差越大;(2)对于不同俯仰角的入射信号而言,俯仰角越大则对应方位角测量误差越大。极端情况下,当入射信号方位角为45°、俯仰角为30°时,对应方位角的测量误差可达-7.2°。
这种测量误差是由于一维线阵干涉仪本身的特性决定的,最根本的解决方法是将一维干涉仪扩展为二维干涉仪测出入射信号的俯仰角,从而精确计算出方位角,但二维线阵干涉仪也会增加多路天线、微波以及后端接收处理模块,大大增加整个侦察系统的成本。
2 基于相邻阵面的测向补偿算法
单个阵面一维线阵干涉仪可以接收±60°甚至更宽角度范围的信号,在实际应用中一般用4个相互垂直的一维干涉仪阵面覆盖方位360°范围。在一定角度范围内的入射信号相邻2个阵面都能接收到,由前文分析结果可知,相邻阵面对同一部信号的方位角测量值不同(超出了方位角测量容差),会导致信号分选时出现2部信号,即出现“信号增批”现象,干扰操作员判断,影响了测向系统的整体性能。
2.1 补偿算法

(6)
对于阵面2,有:
(7)
联立式(6)和式(7)得:
(8)
(9)

图4 高俯仰两阵面测向偏差示意图
2.2 正确判断高俯仰角信号的条件
假定单阵面可以正常测向的范围为±60°,俯仰覆盖±30°,每个阵面判断范围则为方位30°~60°和-30°~-60°,俯仰10°~30°。从分析结果看,高俯仰下单阵面测量方位角向阵面法向偏移,由此,相邻阵面同时收到同一信号时,相邻阵面的2个测量角度会形成1个夹角,高俯仰信号判断可以根据相邻两阵面测量角的夹角进行判断。根据分析,相邻两阵面测量角的夹角与入射信号俯仰角的对应关系如表1所示。

表1 俯仰角与测量角夹角范围对应关系
3 算法验证
3.1 仿真验证
相邻2个阵面的交界处为45°,假设单个阵面可以覆盖到60°,那么对于阵面1而言,在30°~45°范围内可以利用阵面2方位角测量值推算出入射信号的俯仰角,再结合阵面1方位角测量值推算出入射信号方位角。同理,对于阵面2而言,在45°~60°范围内可以利用阵面1方位角测量值推算出入射信号的俯仰角,再结合阵面2方位角测量值推算出入射信号方位角。从而减少方位测量误差。
假设测向系统是理想的,入射信号俯仰角为20°,在方位30°~60°范围内做圆周运动,通过仿真可以看出补偿前阵面1的方位角测量值小于真实值,阵面2的方位角测量值大于真实值,且在交界处阵面1与阵面2的方位角测量值会发生“跳跃”。补偿后,在交界处阵面1与阵面2的方位角测量值是连续的。
3.2 试验验证
2个一维线阵干涉仪阵面相互垂直地安装在1个三维转台上,在距离转台中心500 m远处架设1个信号源,信号参数为:频率5 000 MHz、重复周期1 000 μs、脉冲宽度5 μs,控制转台在俯仰-20°、方位0°~90°范围内以0.5°/s匀速转动,通过录取报文形式来记录信号分选目标,并统计方位角测量精度。
如图5所示,采用补偿算法前,方位角测量值会从阵面2的52°“跳跃”到阵面1的46°,由于方位角变化量超出了容差值,信号在从阵面1过渡到阵面2时信号分选结果会出现“换批”和“增批”的现象。采用补偿算法后,在阵面1和阵面2交接范围内,方位角测量值在真实值附近上下波动,其变化值在容差范围内,信号分选结果始终保持1部目标方位角连续变化。经统计补偿前的测向误差为1.79°,补偿后的测向误差为1.58°,也比补偿前有所改善。说明补偿算法是有效的。
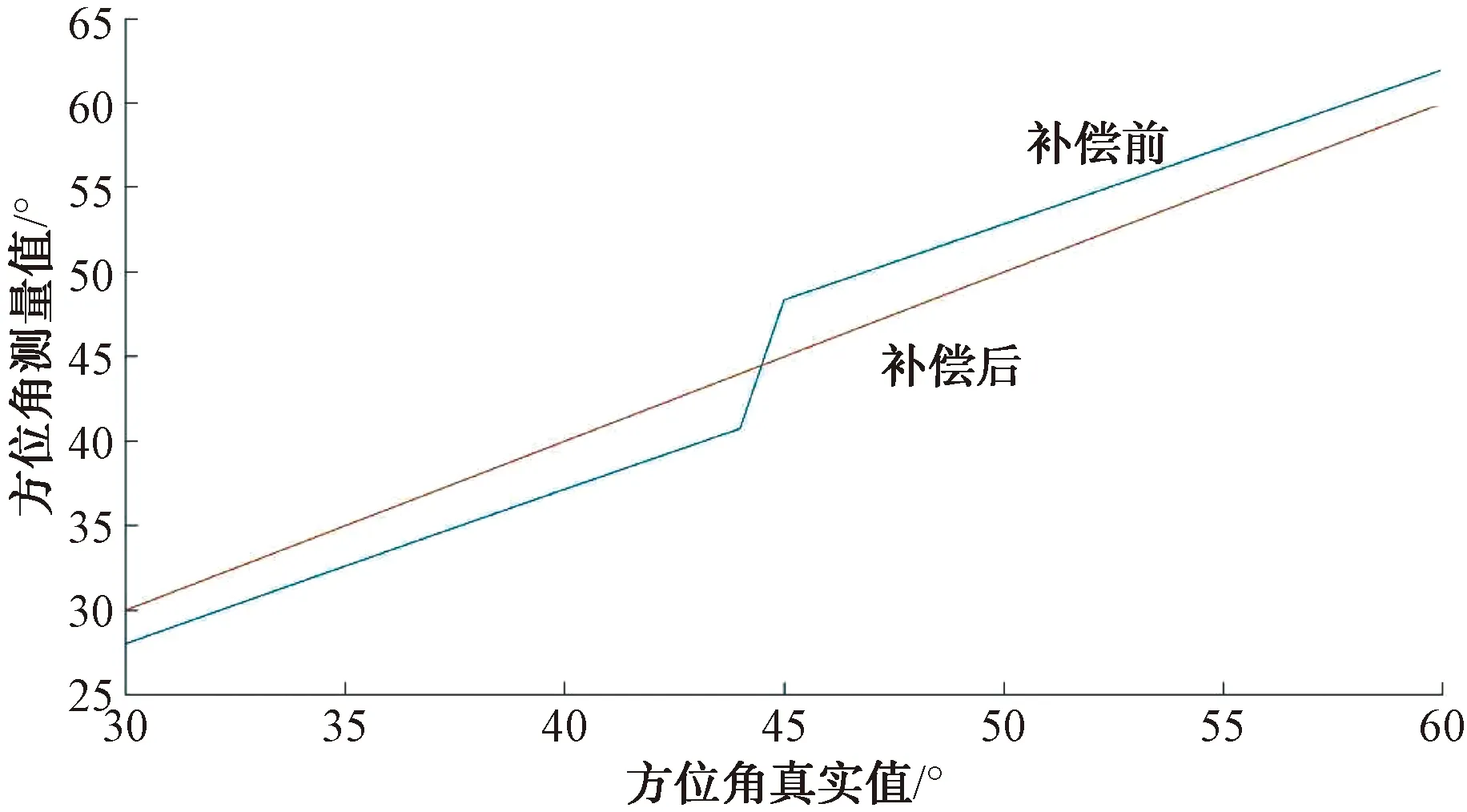

图5 采用补偿算法前后的方位角测量值
4 结束语
本文通过对一维线阵干涉仪测向原理和缺点的分析,提出了一种利用2个相互垂直的一维线阵干涉仪测向补偿方法,并且分析了正确判断高俯仰角信号的条件。通过仿真和试验验证了该方法的正确性和有效性,对一维线阵干涉仪测向系统的实际应用具有一定的指导意义。
