陆地生态系统碳监测卫星控制系统方案设计及在轨验证
2023-11-13徐赫屿乌日娜陈琳娜
刘 洁, 徐赫屿, 张 涛, 乌日娜, 陈琳娜, 陈 超
1. 北京控制工程研究所, 北京 100094
2. 空间智能控制技术全国重点实验室, 北京 100094
0 引 言
作为主要温室气体之一的二氧化碳,其排放量对全球变暖影响巨大.欧洲于2002年发射的极轨对地环境观测卫星Envisat-1是第一个能精确测量二氧化碳和甲烷浓度的卫星,其数据应用范围很广[1-2].2018年10月日本成功发射了GOSAT-2,以获取更高精度的温室气体观测值[3-4].美国于2014年发射OCO-2卫星,主要任务是绘制完整的大气二氧化碳地理分布图[5-6].我国的陆地生态系统碳监测卫星(句芒号)[7]于2022年8月4日11:08分发射入轨,可通过多种综合遥感手段,服务林草、环保、测绘、气象、农业、减灾等行业用户,是世界首颗森林碳汇主被动联合观测遥感卫星,提高了中国应对全球气候变化的话语权和主导权.
传统的高分辨率遥感卫星一般对控制分系统提出较高的姿态确定精度和较高的姿态稳定度要求[8-10].对地观测卫星姿态调整一般需要进行目标姿态轨迹规划[11-13],但是对于角加速度较小而调姿角度较大的情况,常用的轨迹规划方法很难在不激发挠性振荡的同时兼顾快速性.对于高稳姿态控制,一般受帆板驱动机构、天线或转台等转动部件的影响较大,可以通过干扰力矩估计进行前馈力矩补偿[14-17].对于卫星上实时的地面或月面参数特征,一般根据数字高程模型(digital elevation model,DEM)进行鉴别[18-20],该方式在嫦娥一号卫星中用于中尺度的月球表面的地质地貌、盆地和火山等,但该方法数据存储量大且搜索算法实效性差.
姿态控制系统是整个卫星系统中最为关键,也最复杂的分系统之一[21],句芒号卫星采用一体化安装的甚高精度星敏感器实现高精度的姿态确定,配置了高刚高稳SADA进行太阳帆板控制和0.1 N·m/50 N·m·s的动量轮进行姿态控制,为了在不激发挠性振动的情况下尽可能缩短机动时间设计了混合轨迹规划姿态机动算法.卫星针对载荷对月定标的需求,设计了任意时刻经过任意惯性空间位置的惯性扫描模式.针对卫星自主任务规划的需求,设计了一种基于地表模型图的星下点地表属性预报方法,实现了陆地/海洋、境内/境外、阳照/阴影的地表属性预报.针对首次搭载的火点检测敏感器,设计了高精度的火点指向地理经纬度计算,并为敏感器提供了太阳天顶角、卫星天顶角、相对方位角等云判辅助信息和相对地表线速度进行火点实时动态预报,在轨实现了高可靠的敏感器火点指向计算和伪火点剔除.
本文首先对姿态控制系统进行介绍,其次对控制系统方案设计进行详细介绍,包括姿态机动算法、惯性扫描算法、地表属性预报算法、火点敏感器相关计算,最后给出在轨验证情况.
1 姿态控制系统简介
1.1 分系统主要功能
句芒号卫星入轨时工作在轨道高度约为500 km的太阳同步轨道上.卫星结构如图1所示.
图1 卫星结构示意图
句芒号卫星控制分系统的主要功能包括:
1)控制与推进分系统配合完成卫星入轨后的初始姿态捕获,消除星箭分离和帆板展开产生的扰动,建立对地定向三轴稳定的正常飞行姿态;2)控制帆板完成对太阳的捕获与定向跟踪,保证星上能源要求,并为数传天线提供指向控制的指令,实现天线对地面站的捕获与跟踪;3)正常情况下由动量轮进行偏流角修正和侧摆机动等姿态控制,各动量轮工作在标称转速附近,通过动量轮间的协调控制实现整星姿态零动量控制;4)为配合载荷在轨定标,控制分系统具有偏航定标偏置飞行、惯性空间定向飞行、惯性空间扫描的能力;4)具有预报90 min后的卫星星下点地表属性的能力,包括阳照/阴影、境内/境外、陆地/海洋;5)卫星根据火点敏感器输出的火点时间、火点数目和每个火点的视线方向,计算出火点时间对应时刻的每个火点的地理经纬度,并进行伪火点剔除,同时输出火点对应的太阳天顶角、卫星天顶角、相对方位角、火点经纬度等若干角度信息;向火点检测敏感器提供地面火点相对于敏感器镜头(本体坐标系)的相对地表的线速度、敏感器角速度在其基准镜坐标系的矢量.
1.2 分系统组成
控制分系统由姿态敏感器、执行机构和控制器3部分组成.
句芒号卫星姿态敏感器包括:高精度陀螺、甚高精度星敏感器、太阳敏感器;执行机构包括:动量轮、高刚高稳帆板驱动机构及推进系统.控制器包括:中心控制单元、驱动控制单元、信息采集单元.
2 控制分系统方案设计
句芒号卫星控制分系统采用陀螺预估卫星姿态,星敏感器对卫星姿态进行卡尔曼滤波修正,组成高精度的姿态测量系统.采用5个0.1 N·m/50 N·m·s的动量轮,进行零动量姿态控制,姿态控制过程中进行天线预置规划角度平滑和干扰力矩估计和前馈补偿,组成高稳定度的姿态控制系统.
该卫星方案设计的主要特点是:1)激发挠性振动的情况下尽可能缩短机动时间设计了混合轨迹规划姿态机动算法,采用0.1 N·m/50 N·m·s的动量轮进行姿态控制;2)针定标的需求,设计了任意时刻经过任意惯性空间位置的惯性扫描模式;3)自主任务规划的需求,设计了一种基于地表模型图的星下点地表属性预报方法,实现了陆地/海洋、境内/境外、阳照/阴影的地表属性预报;4)首次搭载的火点检测敏感器,设计了高精度的火点指向地理经纬度计算,并为敏感器提供了太阳天顶角、卫星天顶角和相对方位角等云判辅助信息和相对地表线速度,实现了高可靠的敏感器火点指向计算、火点动态预报和伪火点剔除.
2.1 姿态机动控制
为实现卫星姿态的快速机动,最直接的方法是根据机动时初始角度和目标角度,并综合执行机构能力与陀螺角速度测量量程预先规划运动轨迹,将调节控制问题转化为轨迹跟踪控制问题.当机动角度大、稳定时间短、稳定度指标高时,机动过程激起的帆板挠性振动成为制约机动性能的主要因素.
混合轨迹规划综合了Bang-Bang轨迹规划的快速性和正弦轨迹规划算法规划光滑的运动轨迹,减小对帆板的振动激励,最大限度的缩短机动到位后的姿态稳定时间.
算法规划的角加速度分为加速段、匀速段、减速段3部分.加速段的角加速度分为正弦函数加速到最大角加速度阶段、最大角加速度保持和正弦函数减速到角加速度为零的阶段,其中加速时间tmax由地面注入,当注入tmax为0时,则算法与Bang-Bang控制算法一致,当注入时间较大时,则算法与正弦轨迹规划算法一致.相应计算各段的时间点和整个时间历程的规划角速度及规划角度.
因此,在卫星侧摆机动时,根据侧摆目标角χm和加速时间tmax设计了一种混合轨迹规划方法.图2中amax和ωmax为最大角速度和最大角加速度,可以根据卫星挠性影响的情况进行设置,t0为机动起始时间,t1为加速时间,t2为加速和匀速总时间,t3为轨迹规划到位时间.
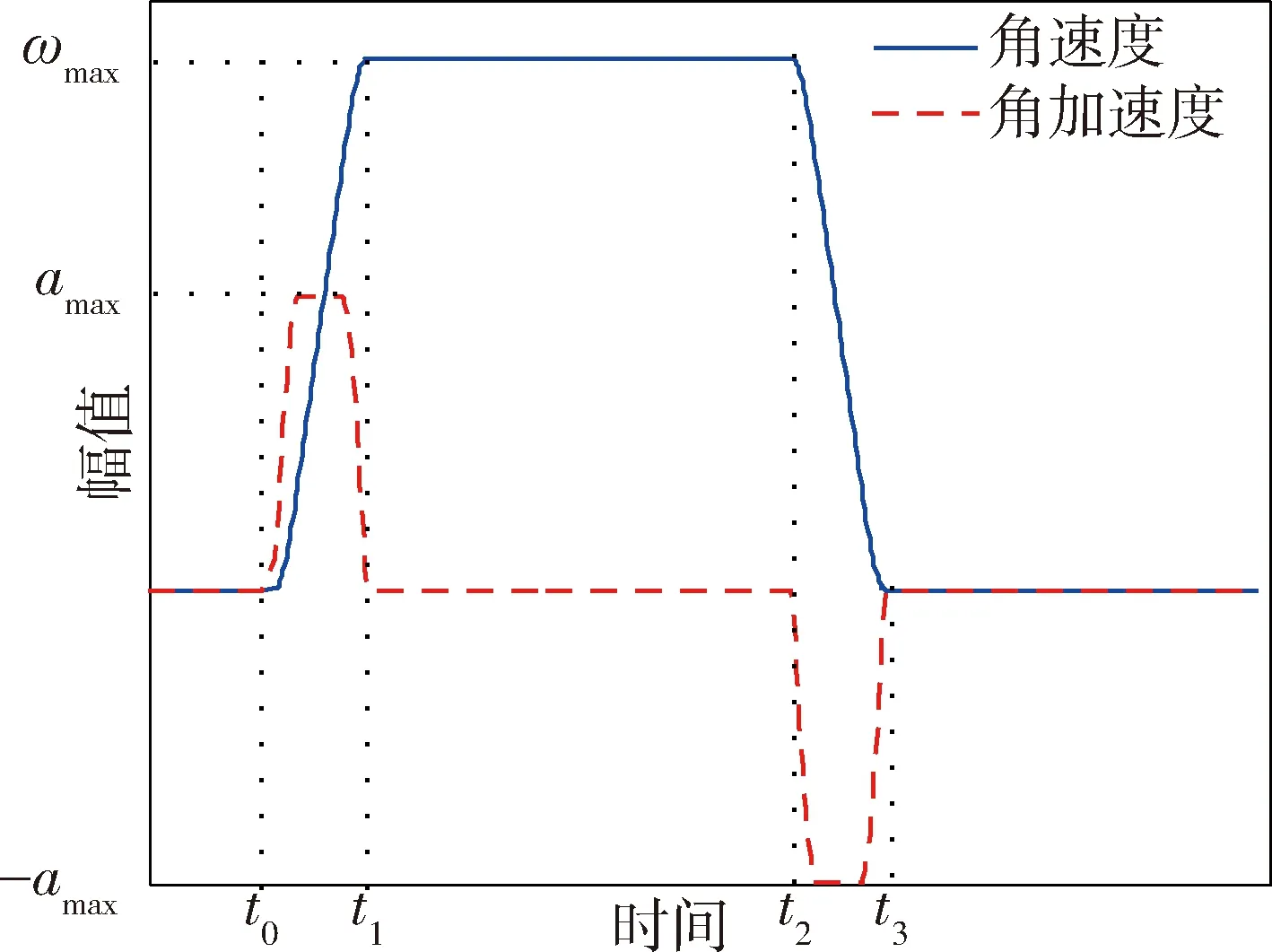
图2 规划角加速度和角速度示意图

(1)
式中,J为卫星惯量,Ca为实时的卫星姿态矩阵,e为机动轴.
采用PD控制律进行姿态机动和姿态控制.
2.2 惯性扫描模式
为了实现载荷的对月定标,需要实现在指定某一个时刻卫星光轴从某一个天区按照指定的角速度进行载荷定标成像.由于从当前卫星姿态机动到目标姿态(载荷开机时刻的姿态)对应的欧拉转角与卫星所处的轨道位置相关,为了兼顾开机时刻并把开机前的等待时间最小化,以降低由于非正常对地姿态产生的外扰角动量积累,必须动态确定机动起始时刻并计算该时刻对应的欧拉转角.卫星采用一种机动角度不确定且存在末端角速度约束的姿态机动/指向路径动态规划方法,采用预估-校正思想,通过迭代计算多次预估并校正机动角度,确保机动结束后满足姿态角速度约束.
设载荷视轴在初始时刻指向在天球坐标系上的坐标为{ra1,rd1},其中ra1为天球坐标系的赤经,rd1为天球坐标系的赤纬.由初始指向的天球坐标可以求得初始指向矢量z1
z1=[cos(rd1)cos(ra1) cos(rd1)sin(ra1) sin(rd1)]T
(2)
设卫星视轴的目标指向为{ra2,rd2},其中ra2为目标指向的赤经,rd2为目标指向的赤纬.那么,由目标指向的天球坐标可以求得目标指向矢量z2
z2=[cos(rd2)cos(ra2) cos(rd2)sin(ra2) sin(rd2)]T
(3)
当卫星视轴从z1向z2扫描时,星体的转动轴可由如下矢量积求得:
y=z1×z2
(4)
其中×为矢量积.根据z1和y两矢量,可采用矢量积进一步求得与z1和y两矢量均垂直的第3个矢量x
x=z1×y
(5)
那么在卫星载荷视轴在扫描初始时刻的卫星目标姿态矩阵Cstart为
Cstart=[xyz1]T
(6)
根据目标姿态矩阵Cstart可求得目标四元数qstart.为了满足载荷对月定标的需求,扫描时间尽量选择在地球阴影区,扫描天区避开太阳干扰,提前2~3圈上注输入的惯性扫描参数:载荷开机时刻tstart、扫描天区的起始目标姿态四元数qstart、扫描时长Δtslew、三轴扫描角速度ωslew.
根据载荷定标的输入参数迭代计算确定机动起始时刻后,卫星先将姿态角速度阻尼下来,然后机动到目标位置附近,再建立扫描角速度,按照“阻尼-机动-起速-扫描”4个步骤完成一个目标扫描任务.阻尼阶段通过S曲线规划消除轨道角速度ω0,机动和起速阶段采用混合轨迹规划计算,姿态机动时考虑前馈补偿力矩补偿,采用PD控制律进行姿态机动和姿态控制.
2.3 星下点地表属性预报
根据总体自主任务规划的需求,要求控制分系统实时给出90 min后的星下点地表属性:陆地/海洋、境内/境外、阳照/阴影.考虑到目前的DEM数字高程在高纬度地区缺乏模型、数据存储量较大、搜索算法对软件计算要求较高等问题,句芒号卫星通过预装地表模型图的方式进行星下点地表属性预报,下面给出算法步骤.
步骤1.预装地表模型图.为简化星上地表定位算法,地表模型图采用等间隔的经度条带,每一个条带给出该条带区域内为“境内或者陆地”的地理纬度上限和下限,对于地形复杂的地区,该条带分为多组地理纬度上限和下限进行描述.目前卫星装订的中国和各大陆的地图,陆地划分为亚洲、欧洲、非洲、澳大利亚、新西兰、马达加斯加、北美洲、南美洲、格陵兰-冰岛、南极洲,经度条带的间隔为1°,其中澳大利亚的地形较为复杂,每个经度条带对应的纬度上下限为4组.所有地表模型图经纬度信息采用单精度浮点数进行数据存储,占用字节数不足20 k.
步骤2.预报90 min后的卫星轨道和卫星理论姿态.根据GNSS定位数据进行轨道外推计算和理论姿态预报,理论姿态需要考虑偏流角修正.
步骤3.预报星下点地理经度L90、地理纬度δ90和太阳星历Soz90.根据t+90 min后卫星在WGS84坐标系下的位置Xn84、Yn84、Zn84,按照地球为标准椭球,计算该时刻的星下点地理经纬度
(7)

(8)

步骤4.根据Soz90进行阳照或阴影预报.对于句芒卫星若arccos(Soz90)<1.55, 则为阴影区.
步骤5.根据预装的中国境内地图进行境内或者境外的预报,根据预装的陆地地图进行陆地或者海洋的预报.
首先将总体给出的地图有效区域内的经度条带采用线性插值的方式构成有效梯形区,示意图如图3所示.
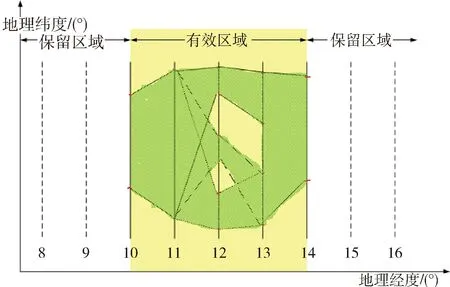
图3 地图划分方式示意图
根据地理经度L90定位到某地图(境内地图或大陆地图)对应的经度条带内,并进行如下判断:若地理经度不在有效区域(位于保留区域或地图外部),则给出为境外或海洋的标志;若地理经度、地理纬度位于有效梯形区域内,则给出境内或陆地的标志.
2.4 火点检测敏感器相关计算
为实现高可靠的敏感器火点指向计算、火点动态预报和伪火点剔除,卫星根据火点检测敏感器输出的火点时间、火点数目和每个火点的视线方向,计算出火点时间对应时刻的火点地理经纬度,并为敏感器提供太阳天顶角、卫星天顶角、相对方位角等云判辅助信息和相对地表线速度.控制分系统根据火点地理经纬度和已知的沙漠或湖泊等地区进行伪火点剔除,敏感器根据相对地表线速度进行火点像元在敏感器视场内的动态预报,进行伪火点剔除.
目标点相对于敏感器镜头(本体坐标系)的相对地表线速度rves可以表示为
rves=ωe×R-(vs+ωRi×rs)
(9)
式中,ωe是地球自转角速度矢量,R是地心到目标点的矢量,vs是卫星运动速度,ωRi是卫星在参考坐标系下的目标惯性角速度矢量,rs是卫星质心到目标点的距离矢量.
下面给出太阳天顶角、卫星天顶角和相对方位角的定义,具体见图4所示.太阳天顶角,即火点与太阳连线、火点与地心连线的夹角α.卫星天顶角,即火点与卫星质心连线、火点与地心连线的夹角β.相对方位角.定义火点为A,太阳矢量在地球上的投影点为C,AN为连接A和N的球面最短连线(即过A点的经线),CN为连接C和N的球面最短连线(即过C点的经线),则由AN自东向西旋转到CN的球面角λ为相对方位角.

图4 太阳天顶角α、卫星天顶角β、相对方位角λ示意图

(10)

(11)
A=1+d·uI(3)2;B=r·uI+d·r(3)·uI(3);
从地心指向火点i的位置矢量
(12)
4)计算火点i的太阳天顶角αSunG,i
(13)

(14)
5)计算火点i的卫星天顶角βsatG,i
(15)

3 在轨和仿真验证
3.1 姿态控制机动
句芒号卫星采用混合轨迹规划算法和前馈力矩补偿,侧摆机动测试中的三轴姿态角曲线如图5所示.
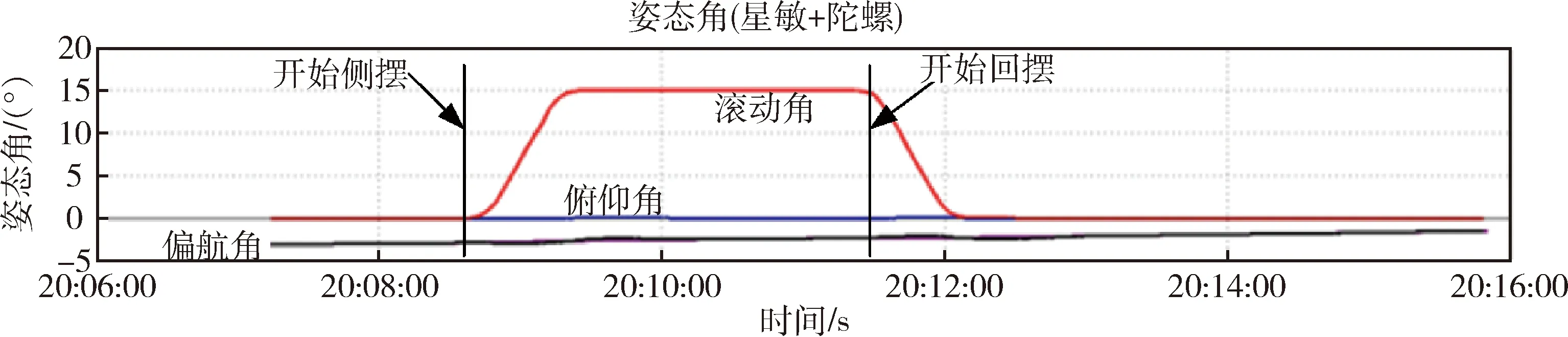
图5 侧摆过程中的三轴姿态角曲线
在轨数据表明,卫星可完成偏流角及角速度控制,扣除标称偏流角后,姿态控制误差优于0.005°,姿态稳定度优于0.000 06(°)/s,为卫星实现高分辨率的立体测图提供了稳定运行平台.
3.2 地图预报功能
句芒号卫星在轨实时进行地表属性预报,图6为在轨预报的陆地属性信息,该属性信息满足总体指标要求,已用于载荷的自主任务规划.
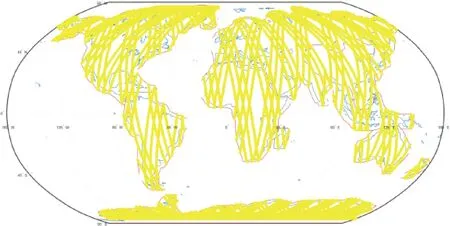
图6 地表属性的陆地预报结果
3.3 惯性扫描
句芒号卫星进行对月定标扫描,根据扫描起始和结束的天区计算出扫描起始惯性四元数和扫描时长,扫描轴为Y轴,扫描角速度为0.7(°)/s,图7为惯性扫描期间规划的惯性角速度,图8为扫描期间载荷光轴的惯性指向,数学仿真结果表明,根据数学仿真验证的结果表明,卫星的惯性扫描模式可以实现在指定时刻按照指定的扫描角速度通过指定天区.
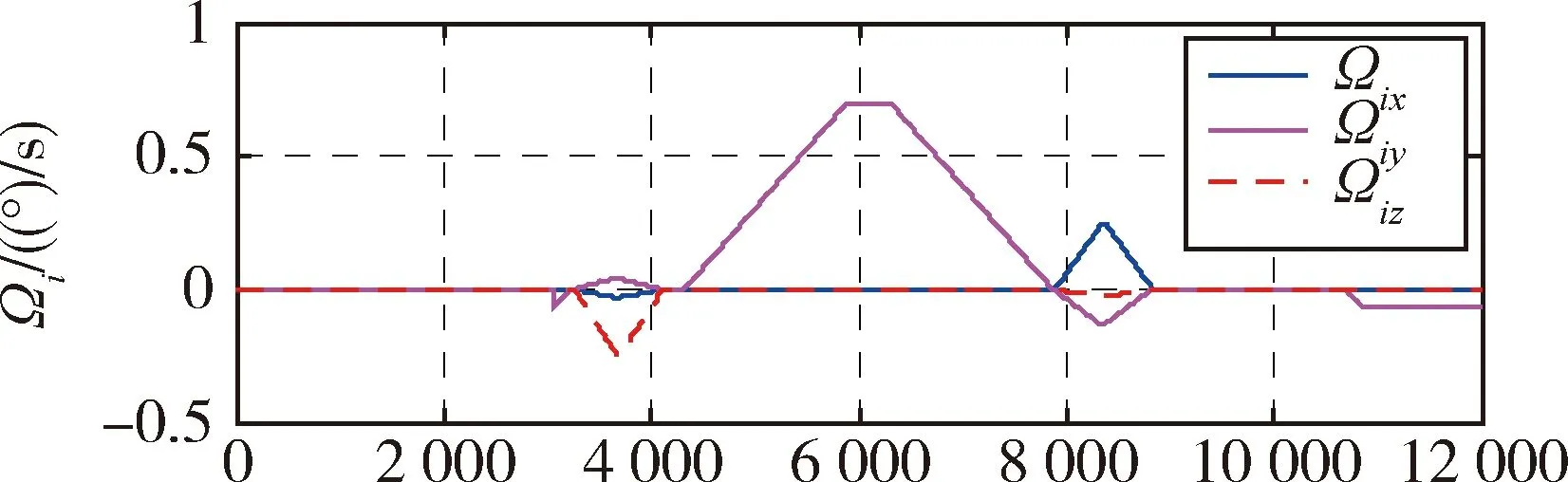
图7 惯性扫描期间规划的惯性角速度

图8 惯性扫描期间载荷光轴的惯性指向
3.4 火点敏感器相关计算在轨验证
火点检测敏感器子系统首次搭载于陆地生态系统碳监测卫星点火升空,截至2022年8月10日,地面累计收到位于俄罗斯、巴西、赞比亚、刚果和加拿大等地的82个全球火灾事件情报信息,图9为在轨火点检测敏感器定位的森林火灾经多信息源确认情况,地理位置定位准确,验证了火点检测敏感器的在轨实时检测、定位和信息实时分发能力.

图9 多信息源森林火灾信息确认
4 结 论
句芒号卫星姿态控制系统采用稳态转速波动小于5%的高刚高稳SADA和数传天线前馈力矩补偿的控制方式实现了优于0.000 06(°)/s的稳定度指标;在侧摆机动时,采用混合轨迹规划算法和前馈力矩补偿,在给定的时间内实现了姿态机动和稳定;设计的惯性扫描模式,可以实现按照指定的扫描速度,在指定时刻经过指定的惯性天区;设计的一种基于地表模型图的星下点地表属性预报方法,实现了陆地/海洋、境内/境外、阳照/阴影的地表属性预报;针对首次搭载的火点检测敏感器,实现了高精度的火点指向地理经纬度计算,为后续推广火点敏感器的市场应用,早日实现空间组网,提高我国应对自然灾害的应急响应能力奠定了基础.
