自动驾驶汽车实验教学平台研发
2023-10-26雍加望冯琦李岩松冯能莲张卫强
雍加望 冯琦 李岩松 冯能莲 张卫强


DOI:10.3969/j.issn.1671-489X.2023.14.033
摘 要 自动驾驶已成为未来汽车技术发展的主要方向之一。为使学生理解并掌握自动驾驶核心技术,研发了基于快速控制原型的自动驾驶汽车实验教学平台。平台集成了感知传感器、快速控制原型设备及线控底盘系统,能够基于MATLAB/Simulink搭建自动驾驶控制模型,并借助快速控制原型设备实现自动驾驶功能的开发与实验,为高校教学与实践奠定实验基础。
关键词 自动驾驶;实验平台;线控底盘
中图分类号:G642.423 文献标识码:B
文章编号:1671-489X(2023)14-0033-05
Research and Development of Experimental Tea-
ching Platform for Autonomous Vehicle//YONG Jiawang, FENG Qi, LI Yansong, FENG Nenglian, ZHANG Weiqiang
0 引言
自动驾驶汽车是集成环境感知、高精地图、决策控制及人工智能等多种技术的综合体[1-2],可以显著提升汽车的行驶安全性。自从美国国防部第一次举办自动驾驶挑战赛以来,自动驾驶技术愈来愈受到关注[2],国内外提出了一系列研究平台以促进自动驾驶技术的测试与发展。Matthias等人[3]提出了一种基于虚拟场景的实车在环测试平台,借助搭建的与实际道路一致的虚拟场景模型,模拟一些较为危险的行驶工况,在实现自动驾驶功能有效测试的同时避免实际道路测试带来的风险。Jin等人[4]提出了一种内置高精度车辆模型的智能汽车测试台架,能够对智能汽车驾驶过程中受到的各类型干扰进行模拟,与线控底盘结合,能够对一些非线性程度较强,传感器受到不同程度干扰的行驶工况进行仿真。为匹配行业前沿技术的发展需求,国内高校纷纷开始建立自动驾驶汽车实验平台,用于开展实践教学与创新设计。如花威等人[5]搭建了基于模型在环仿真的自动驾驶虚拟测试平台,可以通过导入实车监控数据验证强化学习算法的有效性。赵祥模等人[6]提出了基于整车在环仿真的自动驾驶汽车室内快速测试平台,可实现场景及传感器虚拟仿真、车辆模拟及智能驾驶策略验证等功能。马志成等人[7]利用虚拟现实和仿真技术建立了自动驾驶整车在环仿真平台,基于真实车辆动力学特性验证不同场景下的智能驾驶策略。王润民等[8]围绕自动驾驶整车在环虚拟仿真测试需求,提出了一种基于多自由度转鼓平台的自动驾驶整车在环虚拟仿真测试平台,包含道路模拟子系统与传感器模拟仿真子系统,并完成了仿真平台的开发及测试流程设计。以自动驾驶汽车自适应跟驰及避撞场景测试为典型应用案例进行了仿真测试,证明了该平台能够满足自动驾驶研发测试的需求。
以上平台均是关注虚拟场景和智能驾驶控制策略的仿真研究平台,缺少对于执行层的研究,且不具备实车道路测试验证功能。此外,除了考虑基于当前技术所能实现的自动驾驶功能以外,還应该考虑对于未来先进技术的直接移植、新功能的开发扩展以及不同功能之间的组合兼容等要求。因此,本文提出一种基于快速控制原型的自动驾驶汽车实验教学平台,其可为自动驾驶感知算法、传感器数据融合算法、自动驾驶上层控制算法,底层执行机构、高级驾驶辅助系统的开发与测试等提供实时高效的实验平台,同时为新兴技术的移植和新功能的开发提供条件。
1 实验平台架构
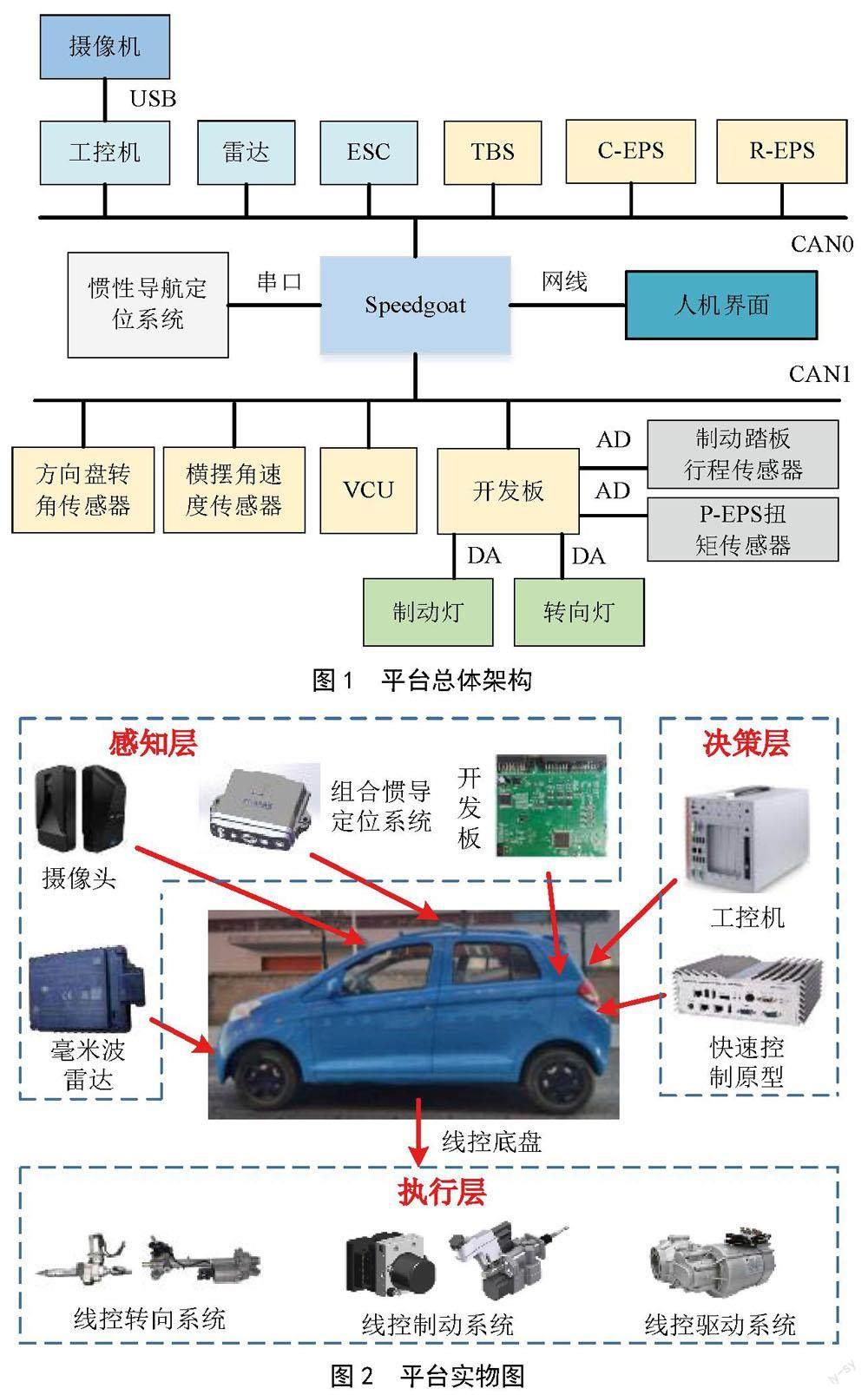
自动驾驶汽车实验教学平台总体架构如图1所示。主要由整车控制器(vehicle control unit,VCU)、线控底盘、快速控制原型设备Speedgoat、感知传感器、状态传感器、工控机、显示器及开发板等组成。其中,线控底盘包括由管柱式电动助力转向(column electric power steering,C-EPS)系统和齿条式电动助力转向(rack electric power
steering,R-EPS)系统组成的冗余线控转向系统、由电动助力制动(electric booster brake,EBB)
系统和电子稳定性控制(electronic stability control,ESC)系统组成的冗余线控制动系统、线控驱动系统;开发板采集状态传感器信号,并通过CAN总线与Speedgoat交互数据;感知传感器包括摄像机、毫米波雷达和惯性导航定位系统;显示器固定在副驾驶前方,用于设置测试工况、显示测试数据。
图2为平台实物图。感知层:惯性导航定位系统输出车辆位置及姿态信息,摄像头获取前方道路图像,通过图像处理算法得到障碍物及车道线信息,毫米波雷达探测前方障碍物距离信息;决策层:Speedgoat通过串口和CAN总线接收感知层信息,并进行感知数据融合,根据融合后的感知数据进行决策判断,通过CAN总线向执行层发送制动、转向以及力矩控制指令;执行层:线控底盘响应决策层控制指令,实现底层闭环控制。
2 实验平台工作原理
2.1 感知层
前向摄像头选择支持汽车安全完整性等级(ASIL)
的安森美AR0231,支持双重转换增益设置,可提高所有照明条件下的精确图像捕获性能;前向毫米波雷达采用我国77 GHz长距离双波束ARS 408-21,并通过软件进行雷达配置及过滤器设置,能够在前向摄像头由于黑暗或大雾等恶劣天气无法正常工作时,采集环境信息;惯性导航定位系统选择北斗星通Npos320,其采用深耦合组合导航算法,内部集成了高精度全球导航卫星系统板卡和车规级MEMS惯性测量单元,选配外部4G通信模块,针对不同场景的智能驾驶应用,可以提供高精度、高可靠性的三维位置、姿态、速度解算,并支持导航原始数据输出,满足多传感器深度融合需要。
2.2 决策层
控制器采用快速控制原型设备Speedgoat Baseline,选用2核Intel Celeron处理器,主频1.4 GHz,内存4 GB DDR3 RAM,64 GB固态硬盘,操作系统为Simulink Real-Time,具备4路CAN、2路COM、1路LAN及6路I/O。工控机采用宸曜科技Nuvo-8240 GC,选用i5 LGA1151 CPU,支持两片NVIDIA? Tesla T4 GPU,4个SODIMM内存插槽,2个×8(4-lanes)的Gen3 PCIe卡槽可插扩展卡,8~48 V宽范围直流输入,内置点火信号电源控制。
基于MATLAB/Simulink搭建感知信息融合算法及自动驾驶控制模型,利用代码生成技术导入至Speedgoat。算法设计指标包括:1)感知融合准确性指标;2)轨迹跟踪指标;3)驾乘人员舒适性指标;4)车辆经济性指标;5)车辆稳定性指标。
2.3 执行层
实验平台中,决策层输出的控制指令通过CAN总线发送至执行层,包括加速踏板开度指令、转向角度指令和制动压力指令。其中加速踏板开度指令通过整车VCU控制电机驱动力矩实现,制动压力通过制动踏板传感器或者上层算法获取。
转向角度指令由线控转向系统实现。平台安装双电机冗余线控转向系统,如图3所示。分别在管柱上安装C-EPS、在转向器齿条上安装R-EPS。C-EPS和R-EPS互为冗余,当其中一个发生故障时,故障信息发送至决策层,决策层将主动转向指令发送至未发生故障的转向电机。在驾驶员接管驾驶之后,C-EPS实现助力转向功能,R-EPS不工作;在决策层判断出驾驶员转向操作会引起危险或驾驶员开启主动转向控制功能时,决策层计算期望转向角,默认由R-EPS实现转向角度指令。在转向管柱加装转角传感器SX-4300,其测量范围为±750°,测量精度为0.1°,用于转角闭环控制。
制动压力指令由线控制动系统实现。系统由EBB和ESC联合组成,如图4所示。制动系统整体构型为串联式单主缸双通道,X型布置,即左前轮、右后轮轮缸对应同一制动回路,右前轮、左后轮轮缸对应同一制动回路,如进行制动时单一回路发生泄漏,剩余回路的制动力基本能保持正常制动力的一半。当EBB和ESC二者均存在故障时,驾驶员踩制动踏板的脚力通过制动液传递至制动轮缸,实现机械备份制动功能。制动压力控制范围为0~
12 MPa。4个轮缸配置制动压力传感器,测量范围0~20 MPa,测量精度为1%。两者联合可以实现助力制动、冗余制动、复合制动、失效备份制动等功能。常规制动时,助力制动、复合制动与主动制动由T-Booster实现;ESC实现增压、保压及减压等制动压力调节功能,调整车辆运动状态以满足动力学稳定性指标。当驾驶员有制动需求时,如果T-Booster出现故障无法实现助力制动,则由踏板力提供制动压力,如果此时的制动减速度较小,且有碰撞危险,上层控制算法控制ESC建立制动压力实现较高的制动减速度需求,避免或者减轻可能发生的碰撞。
3 實验平台测试
3.1 自适应巡航功能测试
自适应巡航(ACC)是借助车辆感知层获取前方车辆信息,控制自车跟随前车车速或者维持某一固定车速行驶的辅助驾驶功能,不仅可以改善车辆行驶过程的安全性和舒适性,降低驾驶员疲劳程度,而且可以提高道路利用率并减少交通拥堵。ACC按照驾驶员设定的车间时距,在保持安全距离作为首要控制目标的前提下与前方车辆保持相同的行驶速度。图5a为ACC试验过程的本车车速与前车车速变化曲线,最大车速跟随误差为3 km/h,最小车速跟随误差为0.5 km/h。图5b为跟车过程中制动压力变化曲线,线控制动系统响应迅速,能够满足ACC系统的控制需求。
3.2 循迹功能测试
循迹控制是借助高精度定位和线控底盘系统对车辆行驶轨迹进行精确控制的自动驾驶技术。可通过控制车辆的运动来减少车辆与参考轨迹之间的误差,使车辆尽可能地按照规划好的路径行驶。精确的循迹控制是实现自动驾驶功能的重要前提。
图6a为循迹过程中的预期轨迹与实际轨迹曲线,算法可以实现较准确的循迹控制。图6b为循迹控制过程中的汽车横摆角速度和方向盘转角曲线。从图中可以看出,循迹控制轨迹与期望轨迹基本重合,横向偏差最大为0.3 m;线控转向系统能够满足循迹控制的转向角控制需求,方向盘转角没有发生突变,转向过程平缓。
3.3 线控制动系统性能测试
EBB闭环建压应保证迅速、稳定、准确。通常用阶跃响应上升时间衡量响应速度,用阶跃响应超调和震荡衡量稳定性,用液压控制的均方根误差衡量准确性。为了验证EBB建压性能,分别进行了阶跃信号和连续阶跃信号的压力跟随性能测试。阶跃测试为从0 Mpa建立起10 MPa期望压力;连续阶跃信号测试初始压力1 MPa,之后期望压力每间隔
4 s分别增加至2 MPa、4 MPa和6 MPa。
图7a为阶跃信号压力跟随测试结果,EBB从
0 MPa建立起10 MPa压力耗时约250 ms,低于传统制
动系统约400 ms的制动压力建立时间,满足GB 21670—2008《乘用车制动系统技术要求及试验方法》关于“从开始操纵控制装置至最不利车轴上的制动力达到规定制动效能所经历的时间不
应超过0.6 s”的规定;到达期望压力后,压力跟随
均方根误差为0.14 MPa。
图7b为连续阶跃信号测试结果,实际压力曲
线在期望压力处存在一定的波动,随后与期望压力
的最大稳态误差小于0.3 MPa,压力跟随全过程均方根误差为0.16 MPa。结果表明,EBB系统的建压性能能够满足自动驾驶汽车实验教学平台的设计
需求。
4 结束语
本文针对交通与汽车类专业实践课程体系与前沿技术脱离的问题,为使学生能够直观且深入地学习和理解自动驾驶技术,提出了一种以快速控制原型技术为基础,具备实现环境感知、自主决策与执行器控制三大关键功能条件的自动驾驶汽车实验教学平台。平台具有完全开放的感知层(环境感知及车身状态感知系统)、决策层(上层控制系统)和执行层(底层执行系统),支持CAN和LIN等多种接口,可以满足多传感器环境感知融合、高级驾驶辅助、自动驾驶、人机共驾、线控底盘等算法的教学和课程设计需求。结合MATLAB/Simulink、Prescan和CarSim等车辆仿真模拟软件,能够实现不同环境、不同车辆、不同控制策略下的仿真测试,并且可以进行驾驶员在环测试,体验不同自动驾驶功能的实际作用方式,验证人机共驾功能。学生通过在该平台上进行功能设计和实验操作,可以有效提升学习兴趣与主动性,增强创新实践能力,成为学术与工程并重的复合型人才。
5 参考文献
[1] 雍加望,冯能莲,陈宁.自动驾驶汽车硬件在环仿真实
验平台研发[J].实验技术与管理,2021,38(2):127-131,
135.
[2] Liu Tianbi, Du Shanshan, Liang Chenchen, et al.
A Novel Multi-Sensor Fusion Based Object Detection
and Recognition Algorithm for Intelligent Assisted
Driving[J].IEEE Access,2021,9:81564-81574.
[3] Jin C, Maitland A, McPhee J. Hierarchical nonlinear
moving horizon estimation of vehicle lateral speed
and road friction coefficient[J].ASME Letters in
Dynamic Systems and Control,2021,1(1):011005-1~
011005-5.
[4] Roland K, Paul P, Mathias B. Vehicle-in-the-Loop:
Augmenting Real-World Driving Tests with Virtual
Scenarios in Order to Enhance Validation of Active
Safety Systems[J].ATZ worldwide,2017(9):52-55.
[5] 花威,史庭俊,呂强.基于模型在环仿真的自动驾驶虚
拟测试平台[J].电子技术与软件工程,2021(8):144-148.
[6] 赵祥模,承靖钧,徐志刚,等.基于整车在环仿真的自
动驾驶汽车室内快速测试平台[J].中国公路学报,2019,
32(6):124-136.
[7] 马志成,王立,李志斌.自动驾驶整车在环仿真平台研
究及模拟实现[J].汽车实用技术,2020(3):34-38.
[8] 王润民,赵祥模,徐志刚,等.一种自动驾驶整车在环
虚拟仿真测试平台设计[J].汽车技术,2022(4):1-7.
项目来源:北京工业大学教育教学研究课题“面向汽车电控与智能汽车两门课程的教学实践平台建设研究”(ER2022SJB
08);国家自然科学基金青年项目“汽车一体化线控制动系统深度耦合机理及其多目标博弈控制方法研究”(52002009);北京市自然科学基金面上项目“智能网联电动汽车电液复合制动机理及运动优化控制方法研究”(3222003)。
作者简介:雍加望,通信作者,讲师;冯能莲,教授。
