基于深度学习的变电站巡检机器人自动抄表研究
2023-10-25李大川杨志明
李大川,杨志明
(国网甘肃省电力公司金昌供电公司,金昌 737100)
0 引 言
随着变电规模的扩大,变电站运维工作量不断增加,传统人工巡检存在执行不规范和操作不到位等问题,提高变电站巡检效率成为亟需解决的问题。近年来,人工智能机器在各领域应用广泛,为变电站智能巡检带来新的契机,变电站巡检机器人应运而生。变电站巡检机器人可替代人工实现远程巡查与在线监测,在减少工作量的同时,还可提升变电站运维效率。正是基于这些特点,巡检机器人被广泛研究。文献[1]提出一种巡检机器人路径规划方法,通过在人工鱼群算法中引入变指数函数的动态视野和泊松分布特征函数,优化拥挤度和转换因子,结合栅格法构建环境地图,从而实现了巡检机器人的路径规划。文献[2]为提升变电站巡检机器人的工作效率,提出一种改进蚁群算法的路径规划方法,使得机器人具有更好的巡检路径。文献[3]针对巡检机器人的仪表问题,采用深度学习CRNN网络进行仪表数字识别,该研究的特点在于简化了人工建模步骤,实现了变电站巡检机器人的自动抄表识别,但该方法存在识别精度低的问题。此外,文献[4]通过综述研究认为目前机器人仪表识别精度和效率较低。
作为变电站巡检机器人的重要组成部分,提高机器人对图象的识别精度,是做好巡检智能化工作的重要任务。因此,本文尝试以目前较为前沿的YOLOX神经网络为基础,通过改进其网络结构和输出函数,进而提高变电站巡检机器人自动抄表识别精度,为变电站巡检智能应用提供一种新的借鉴与参考。
1 YOLOX网络结构
YOLOX网络是YOLO系列目标检测算法中一种经典的模型,可解决YOLOV4和YOLOV5算法过度优化的问题。YOLOX算法采用Darknet53作为骨干网和SPP层,由YOLOV3优化而来。相较于YOLOV3算法,YOLOX算法在输入端主要使用Mosaic进行数据增强,通过裁剪、缩放等方式对图象进行拼接,从而大大提高了对小目标的检测识别精度;通过使用Mixup,减小图象分类的额外开销,提高分类精度[5-8]。同时,YOLOX算法在预测部分通过解耦头增强特征表达能力,通过Anchor-Free减少参数量,并采用SIMOTA进行精细化筛选,从而在保证算法精度的前提下,提高了算法的收敛能力和训练速度。
YOLOX网络结构如图1所示。图1中,输入图象的规格为640×640,通道数为3。当输入图象规格不满足输入条件时,需对输入图象进行裁剪、缩放等预处理。输入图象后,先后经过FOCUS网络结构和卷积层进行间断取点操作和标准化,同时增加四倍通道数,然后进入Resblock body操作,对图象进行压缩并增加通道数。接下来先后进入CspLayer操作提取特征和SPP进行池化,并进行卷积与上采样;最后,将采样的特征进行融合。重复两次上采样与下采样,即完成了整个图象的识别。
2 基于改进YOLOX网络自动抄表识别模型构建
2.1 YOLOX网络的改进
YOLOX网络实现了YOLO系列在目标检测与识别中端对端的性能,提高了收敛速度,但YOLOX算法识别精度与训练样本的正负样本数量有关,而变电站巡检机器人自动抄表的样本数量可能存在正负样本数量不均衡的问题,进而影响网络最终的识别精度。为解决该问题,对YOLOX网络进行改进,具体思路则是添加卷积注意力模块,以及改进其BCE-Loss函数。
2.1.1 引入卷积注意力模块
卷积注意力模块添加在YOLOX网络中的通道层和空间层。在通道层的注意力上,采用Channel Attention进行实现。设输入特征为F,通过式(1)计算通道权重系数Mc(F),然后其与F相乘,得到新的特征Fmc。
(1)
在空间层面注意力上,采用Spatial Attention进行实现。将输入特征F通过式(2)计算空间权重系数Ms(F),并将其与F相乘得到新的特征Fms。
(2)
最后,将Fmc和Fms代入YOLOX的骨干网络。
2.1.2 BCE-Loss函数改进
改进YOLOX网络BCE-Loss函数的目的是使算法更侧重于对难分辨的样本进行识别,以提高算法的识别精度。考虑到本研究是对仪表数据进行识别,其属于小目标检测,要提高小目标检测的精度,就必须解决正负样本可能不均衡的问题。因此本研究选用Focal-Loss函数替代BCE-Loss函数,具体函数公式:
FL(Pt)=-(1-Pt)γlog(Pt)
(3)
通过上述的改进,可进一步提高YOLOX网络的检测与识别精度。
2.2 自动抄表识别步骤
变电站巡检机器人自动抄表识别遵循一般的识别思路[10-15]:一是采集智能电表图象,通过移动巡检机器人协调机械臂,使相机聚焦于目标电表,以采集到清晰的电表图象;二是图象预处理,考虑到采集的图象可能存在噪声的干扰问题,需对图象进行预处理;三是读取电表数据,具体则采用目标检测与识别算法进行识别。基于以上思路,本研究将变电站机器人自动抄表识别步骤分为以下几步:
(1)图象获取。通过变电站巡检机器人机械臂实现自动抄表图象的获取。
(2)图象预处理。考虑到变电站巡检机器人采集的图象为RGB图象,而改进发YOLOX网络的输入图象为二阶黑白图象,因此在原始图象输入前,需要对图象进行预处理。首先对图象进行灰度化处理,提取输入图象R、G、B三原色亮度作为灰度化的三个灰度值,将彩色图象转化为黑白图象;然后对图象进行平移、缩放、旋转等集合闭环,纠正图象的系统误差;最后使用平滑处理消除图象噪声,锐化物体轮廓,实现图象增强。
(3)对改进的YOLOX网络进行训练。在设置YOLOX网络参数的基础上,利用变电站巡检机器人采集到的抄表数据集图象样本对改进的YOLOX网络进行训练。
(4)电表数据识别。将测试图象输入训练好的YOLOX网络中进行识别,并输出仪表识别的结果。
3 仿真实验
3.1 实验环境搭建
本实验基于Pytorch3.8.11深度学习框架搭建改进的YOLOX网络,并在Windows10操作系统上进行仿真训练和测试。系统安装OPENCV等机器视觉基础数据库,同时采用VScode作为IDE工具。
3.2 数据集制作
改进的YOLOX网络验证与对比部分选用COCO数据集作为实验数据集。该数据集是一个大规模对象检测、关键点检测的数据集,共含32.8万张图象。
改进YOLOX网络的仪表图象选用变电站巡检机器人拍摄的智能电表图片共500张作为实验数据,然后将500张图片按照7∶2∶1的比例分为训练集、测试集和验证集。训练集图象格式统一为PascalVOC2007。测试集和验证集首先图象通过二值化处理,然后截图归类到0~9新建文件夹中,并设置其格式为XML。
3.3 评价指标
本实验选用平均精度均值Pavg、精确率P、召回率R作为性能指标,其计算公式[16-17]:
(4)
(5)
(6)
式中:TP表示真正例;TN表示真负例;FP表示假正例;FN表示假负例;K表示类别数量;AP通过下式计算:
(7)
式中:ri表示第i个精确率插值点对应的召回率值。
3.4 参数设置
改进YOLOX网络的参数为:迭代次数300,批大小200,confidence为0.5,学习率为0.01。同时YOLOX网络的目标检测框是影响网络性能的重要参数,通常包括iou-loss和giou-loss两种。其中iou-loss具有对成型和尺度不变性等特点,可用于回归任务,但存在iou不相交时loss为0的问题,导致YOLOX算法模型无法继续训练,而giou-loss解决了该问题。因此,本实验选用giou-loss作为改进YOLOX算法的目标检测框方案。
图2为以giou-loss为目标检测框的改进YOLOX网络模型的训练损失函数情况。由图2可知,采用giou-loss作为改进YOLOX算法的目标检测框进行训练时,可快速收敛达到稳定。
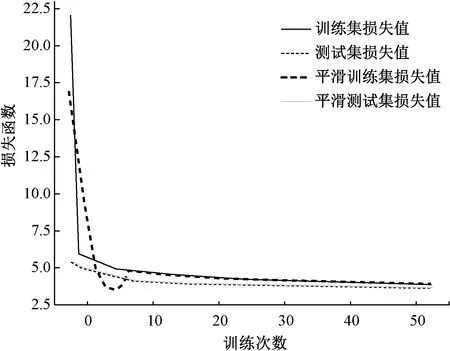
图2 网络损失函数值变化
3.5 结果与分析
3.5.1 算法验证
为验证改进YOLOX网络的有效性,实验对比了YOLOX网络改进前后在COCO数据集上的性能,结果如图3所示。从图3可知,改进YOLOX网络的分类损失函数、置信度损失函数、重合框损失函数、总体损失函数均得到了不同程度的降低,Pavg值也由81.31%时提升到87.23%。由此说明,在YOLOX网络的基础上添加卷积注意力模块对YOLOX网络的改进是有效的。
3.5.2 算法对比
为进一步验证改进YOLOX网络的有效性,实验对比了网络与常用目标检测识别方法SSD算法、DenseBox算法、GA-SVM在COCO数据集上的性能,结果如表1所示。由表1可知,相较于SSD算法和DenseBox算法等,改进YOLOX网络在Pavg、P和R三项指标上的表现均具有明显优势,分别达91.44%,96.36%和98.89%。由此说明,改进YOLOX网络在目标检测识别中具有明显的优势。
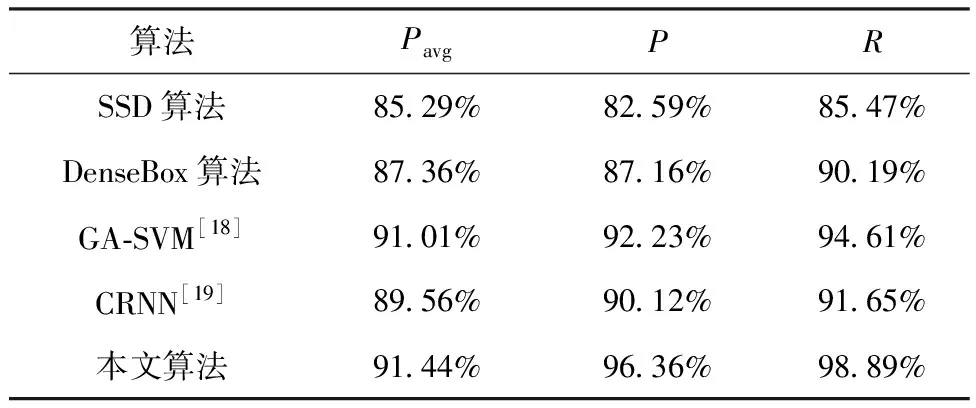
表1 不同算法的识别性能对比
3.5.3 算法应用
为检验改进YOLOX网络的实际应用效果,研究采用算法对变电站巡检机器人自动抄表的数据进行识别。图4为改进YOLOX网络的性能和识别结果。由图4可知,改进YOLOX算法对变电站巡检机器人采集电表数据具有良好的识别准确率,Iouloss值达到1.25%,Pavg值达到90.23%,P值达到93.56%,R值达到98.12%。由此说明,改进YOLOX网络可良好适应变电站巡检机器人的自动抄表识别工作,识别准确率较高,具有一定的有效性和优越性。
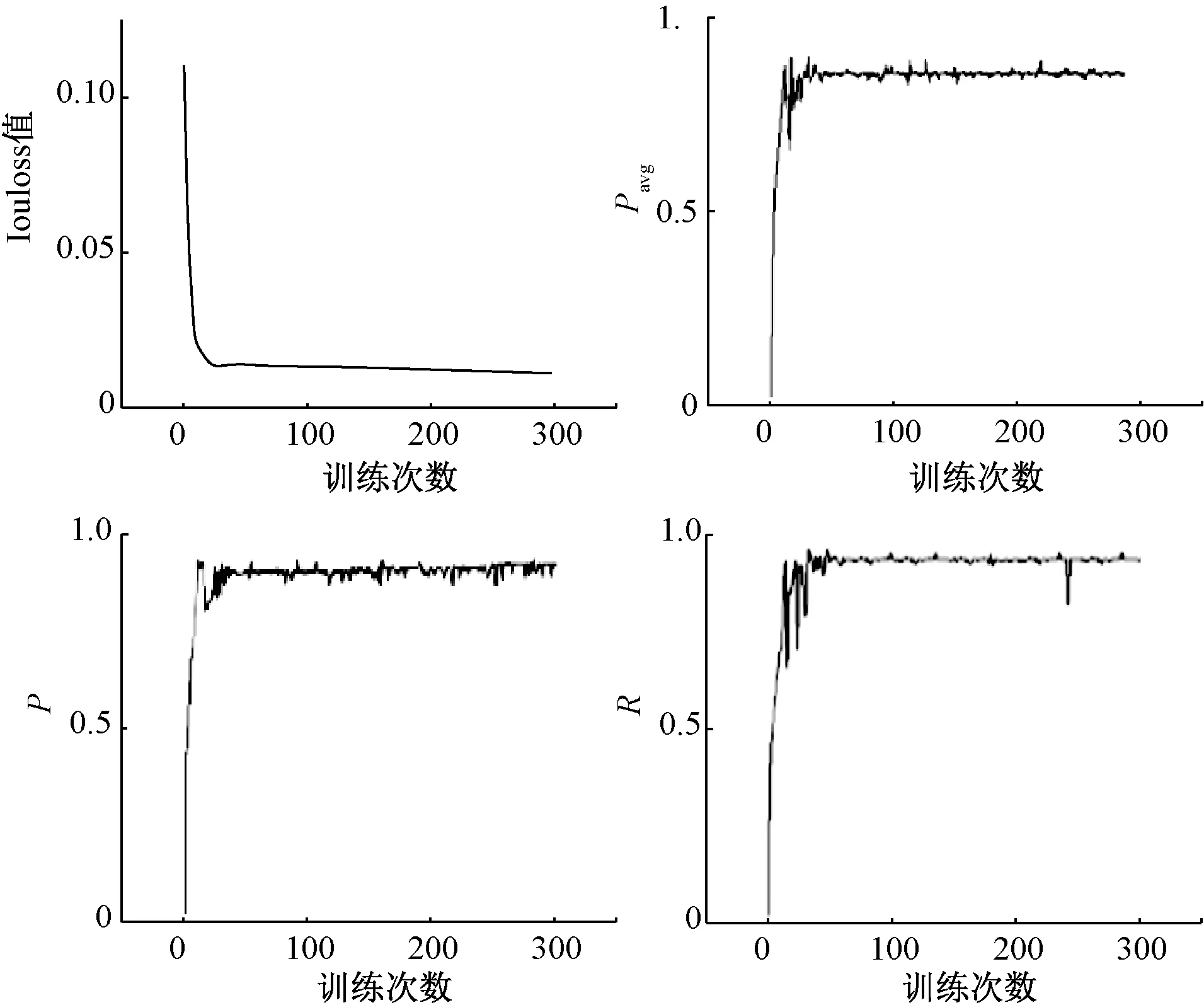
图4 改进YOLOX网络性能
图5为改进YOLOX算法对变电站巡检机器人自动抄表图象进行图象预处理后的识别结果示例。由图5可知,通过变电站巡检机器人的目标检测与识别部分,可清晰识别三行数字。由此可以得出,改进YOLOX网络识别准确率高,识别效果好。

图5 改进YOLOX网络对变电站巡检机器人抄表图象的识别结果示例
4 结 语
综上,通过对YOLOX网络的改进,实现了对变电站巡检机器人自动抄表数据的准确识别。相较于标准YOLOX算法、SSD算法和DenseBox算法,改进YOLOX算法在Pavg、P和R三项指标上的表现均具有明显优势,对变电站巡检机器人自动抄表的识别Iouloss值达1.25%,Pavg值达90.23%,P值达93.56%,R值达98.12%。由此可以证明,改进方法是可行的。但由于条件限制,本研究在变电站巡检机器人图象数据集获取上,数据集还相对较小,同时只是对图象进行简单的预处理,而对模糊图象,机器人采集中存在的遮挡图象等还没有进行详细处理。下一步将尝试从多方面获取变电站巡检机器人图象,并对变电站机器人进行详细设计。
