基于新型指数趋近律的PMSM滑模控制研究*
2023-10-25陈德海曹永康邱福亮
陈德海,曹永康,邵 恒,杨 程,邱福亮
(江西理工大学 电气工程与自动化学院,江西 赣州 341000)
0 引 言
由于永磁同步电机(permanent magnet synchronous motor,PMSM)具有结构简单、体积小、效率高、稳定可靠等优点,应用前景良好,吸引了国内外众多专家人士,其相关领域目前主要集中在数控机床、机器人、新能源汽车等。
由于PMSM系统具有非线性、多变量、强耦合等特点,而传统的PI控制虽然具有算法简单、可靠性高、易于调节等优点,但当控制系统遭受外界干扰或者电机内部参数发生改变时,PI控制抗干扰能力较弱,鲁棒性差。为此,形成了许多新的控制算法,如自适应控制、模糊控制、神经网络控制、滑模控制(sliding mode control,SMC)等。其中SMC由于抗扰性强、响应速度快、稳定性高等特点,所以经常被应用于PMSM控制系统中,由于SMC中的开关切换会导致出现抖振,使其难以发挥优越性,于是研究者们通过对传统趋近律的改进,并构建了新的滑模速度控制器,以达到削弱抖振以及提高系统响应速度的目的。文献[1]在传统指数趋近律等速项和指数项中,引入了系统状态变量的幂次项,抖振得到削弱,但力度不足。文献[2]在传统指数趋近律的等速项上引入了系统状态变量的绝对值项,并且以饱和函数sat(s)取代符号函数,曲线平滑度得到提高,补偿效果良好。文献[3]采用了一种新型的指数趋近律,简单引入了系统状态变量,并设计了滑模控制器,加快了响应速度,并且无超调,更快到达稳定状态。文献[4]引入了系统状态变量和状态变量导数的多项式,并且去除了传统的符号函数,控制效果得到提升。文献[5]引入状态变量幂次项,将等速项系数和指数项系数改成倒数关系。文献[6]提出一种带饱和函数的幂次趋近律,针对不同阶段进行速度的自适应调节,系统动态品质得到一定改善。文献[7,8]用饱和函数代替了符号函数,新加入一个函数,抖振和超调得到控制,但计算较复杂。文献[9~13]改变了传统的等速项,对符号函数做了优化或替换,使之具备趋近速度的自适应调节能力,但较复杂,参数较多。文献[14]在传统指数趋近律之中,结合了终端吸引因子以及状态变量的幂函数,控制效果显著。
本文设计了一种新型指数趋近律,将趋近速度与滑模面函数的绝对值结合起来,在等速项中引入包含对数项的分数多项式,并对符号函数进行平滑处理。
1 PMSM数学模型
设PMSM满足以下条件:1)三相定子绕组相互对称且相同;2)转子永磁体在气隙磁场中以正弦波分布;3)忽略定子铁心饱和,磁路为线性,电感参数不变;4)转子上没有阻尼绕组。
选用id=0的转子磁定向控制方法,在此选择转子坐标系下的数学模型,PMSM定子电压方程为
式中 ud,uq为d轴、q轴定子电压分量;id,iq为d轴、q轴定子电流分量;R为定子电阻;φd,φq为d轴、q轴永磁体磁链分量;φf为永磁体磁链;ωe为电角速度。
电磁转矩方程为
式中 Te为电磁转矩,Pn为电机极对数。
机械运动方程为
式中 J 为转动惯量,TL为负载转矩,ωm为机械角速度,ωe=Pnωm。
2 新型指数趋近律设计
2.1 传统指数趋近律
指数趋近律算法[15]如下
式中 ε为趋近系数,q为指数趋近系数,ε >0,q >0。s为滑模面函数,sign(s)为不连续的符号函数,-εsign(s)为等速趋近项,-qs为指数趋近项。当系统状态点离滑模面较远时,处于趋近运动过程,此时由等速趋近项和指数趋近项共同作用,其中指数趋近项起主要决定作用,q 值越大,到达滑模面越快,ε 值越小,到达滑模面时的速度越小,抖振越小;当系统状态点到达滑模动态时,处于滑模运动过程,此时指数趋近项趋近为零,主要由等速趋近项起决定作用。合理准确地调节ε与q的大小,才能达到加快系统响应速度的效果,同时还能削弱抖振,提高系统的动态品质。
2.2 新型指数趋近律
设计了一种新的指数趋近律,表达式如下
其中,ε >0,q >0,a >0,b >1。
在传统指数趋近律的等速项中加入一个f(s)函数,将运动点的趋近速度与离滑模面的远近结合起来,使得系统能够自适应地调整趋近速度。改进的指数趋近律相比传统指数趋近律,当运动点离滑模面较远时,处于趋近运动阶段,此时|s|较大,f(s)趋于无穷,εf(s)大于ε,在远处的趋近速度得到提升,趋近时间加快,提高了系统响应速度。当离滑模面较近时,处于滑模运动阶段,此时|s |较小,趋近于0,f(s)则趋近于a/(1 +a),小于1,则降低了在滑模面附近的趋近速度,削弱了抖振,控制精度得到提高。
由于符号函数sign(s)不是连续的,是造成抖振的一个重要因素,所以对它进行平滑处理,如下所示
式中 σ为数值较小的正数。
2.3 新型指数趋近律性能分析
为了验证新型指数趋近律的有效性,采用经典的控制系统[16]对趋近律方法进行对比。被控对象如下
滑模面函数
其中,c >0,跟踪误差
其中,θd为期望位置,θ为实际位置。经过计算得到
式中 slaw为趋近律。整理可得控制输出
式中 c =15,期望位置信号θd(t)=sin t。将传统指数趋近律和新型指数趋近律代入控制输出表达式内,其中传统指数趋近律与新型指数趋近律系数q =30,ε =15,a =50,b =10,σ =1。经过仿真,两种趋近律作用效果对比如图1所示。

图1 两种指数趋近律性能对比
从图1中可得出,相比传统指数趋近律,新型指数趋近律在趋近速度方面有所提高,趋近过程时间缩短,以及抖振的抑制得到提升。新型指数趋近律总体性能高于传统指数趋近律。
3 滑模速度控制器设计
3.1 控制器设计
在id=0转子磁场定向控制策略下,并满足Ld=Lq=Ls,定义PMSM系统状态变量
式中 ωref为电机的给定转速,是一个常数,ωm为实际转速(机械角速度),Ls为定子电感。
令D =1.5Pnφf/J,u =iq,由上式得到空间状态表达式
对滑模面函数进行定义
式中 c 为待定系数,c >0,x1为速度差,x2为速度差的导数。然后对上式进行求导,可得
求得控制器表达式
继而可得q轴参考电流
由控制器表达式和q轴参考电流可知,两者都含有积分项,所以在削弱抖振的同时,稳态误差也得到了降低,系统动、静态品质得到提高。
3.2 控制器稳定性分析
定义李雅普诺夫(Lyapunov)函数
对其求导,则有
由于ε >0,q >0,s·sign(s)>0,f(s)也大于0,所以V˙<0,满足可达性条件。
4 仿真与实验分析
建立系统仿真模型,旨在验证新型指数趋近律的可行性,本文采用PMSM双闭环调速系统控制,其中电流环采取传统的PI控制方法,速度环从早前的PI 控制替换为SMC法,并基于新型指数趋近律构建改进型滑模速度控制器。系统框图如图2 所示,并且与PI 控制、传统指数趋近律SMC作仿真对比。电机参数与仿真条件如表1所示。
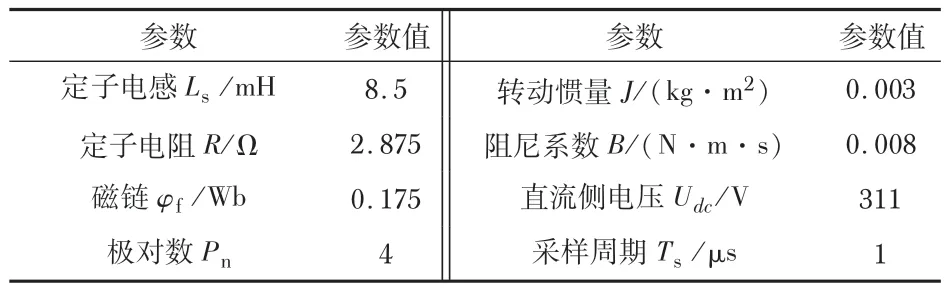
表1 电机参数

图2 PMSM调速系统
滑模速度控制器参数设置:c =100,q =250,ε =50,a =1,b =6,σ =0.008。PI电流环参数设置:比例系数kp=10,积分系数ki=400。仿真时间0.5 s,初始给定转速N*=600 r/min,零时刻负载转矩T1=0 N·m,在t =0.2 s 时,外加负载TL=10 N·m。
从图3 中可以看出,在系统启动过程中,PI 控制超调最大,约在0.13 s处稳定;传统指数趋近律SMC超调较小,约在0.1 s处稳定;新型指数趋近律SMC接近无超调,约在0.09 s处稳定。由图4 可得,三者之中,新型指数趋近律SMC抖振幅度最小,约为89 r/min,波动率14.83%,并最先稳定下来,趋近过程时间短,波动范围最小;传统指数趋近律SMC抖振幅度次之,为99 r/min,波动率16.5%,趋于稳定时间居中;PI 控制抖振幅度最大,为123 r/min,波动率20.5%,趋于稳定的过程较长。

图3 转速曲线

图4 突加负载的转速曲线
由图5结果表明,在PMSM调速系统的启动过程中,采用新型指数趋近律SMC和传统指数趋近律SMC能够使电磁转矩更加快速稳定地到达稳态,并且无超调,PI 控制的电磁转矩曲线回归稳态时存在明显的超调。在0.2 s突加负载后,PI控制稳定过程最长,约0.08 s;传统指数趋近律SMC稳定时间次之,约0.06 s;新型指数趋近律SMC最快,约0.05 s,其稳定后波动范围也最小。
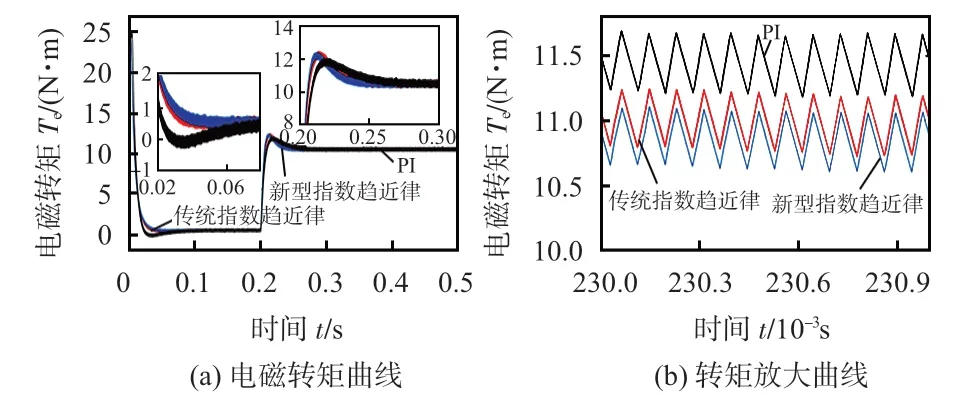
图5 电磁转矩曲线性能对比
从图6中可以得出,PMSM调速系统刚启动时,PI控制振幅较大,并且电流曲线紊乱,分布不均匀;而传统指数趋近律SMC和新型指数趋近律SMC 振幅较小,曲线稳定平缓有序。在0.2 s突加负载后,新型指数趋近律SMC 电流波动幅度最小,只有1.2 A,三相电流曲线最为平整,并且更快稳定下来;传统指数趋近律与PI 控制效果稍显差异,前者电流波动约1.9 A,后者约1.8 A。
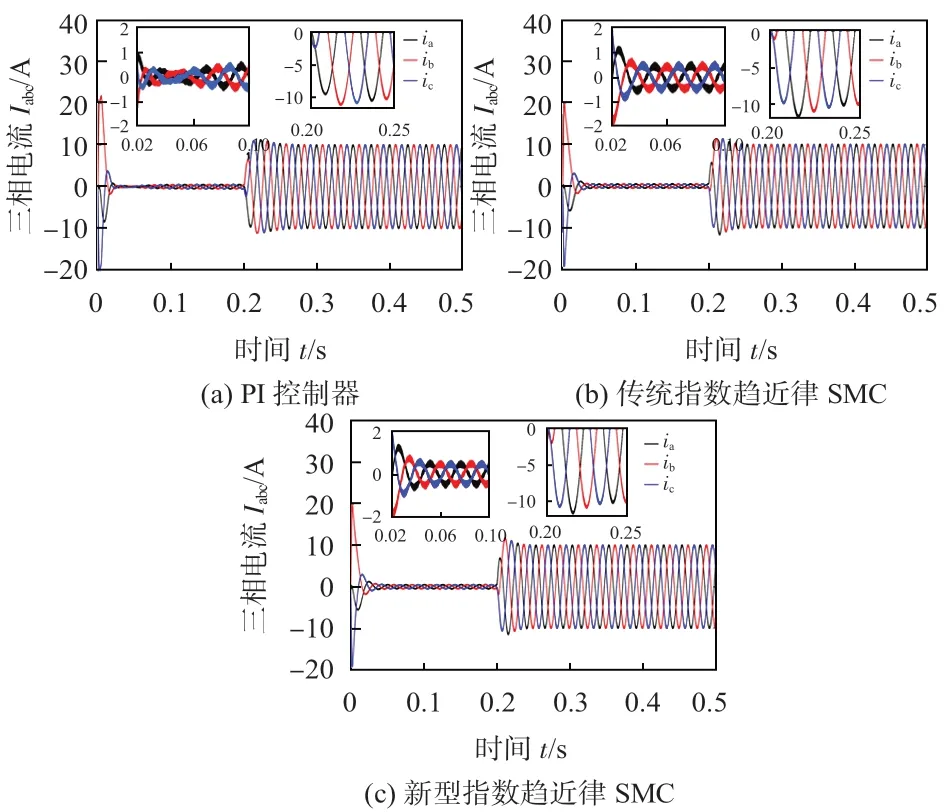
图6 PI控制器和传统/新型指数趋近律SMC下的电流波形
综合仿真图和分析解释,可知改进后的指数趋近律相比于传统指数趋近律和PI控制,超调更小,抖振更小,能够快速稳定地达到稳态,控制精度更好,鲁棒性更强。
5 结束语
本文基于传统指数趋近律,在等速项中引入一个涵盖对数项的分数多项式,将趋近速度和滑模面函数的绝对值结合,实现趋近速度的自适应调整;而后对符号函数进行平滑处理。并且进行模型的搭建以及仿真,构造对应的滑模控制器与传统指数趋近律、PI控制方法进行对比实验。实验结果表明:采用新型指数趋近律能够很好地降低系统超调量,快速稳定地达到稳态,鲁棒性有了显著提高,控制效果得到改善。
